
Game-Theoretic Power and Rate Control in IEEE 802.11p Wireless Networks




Abstract
:1. Introduction
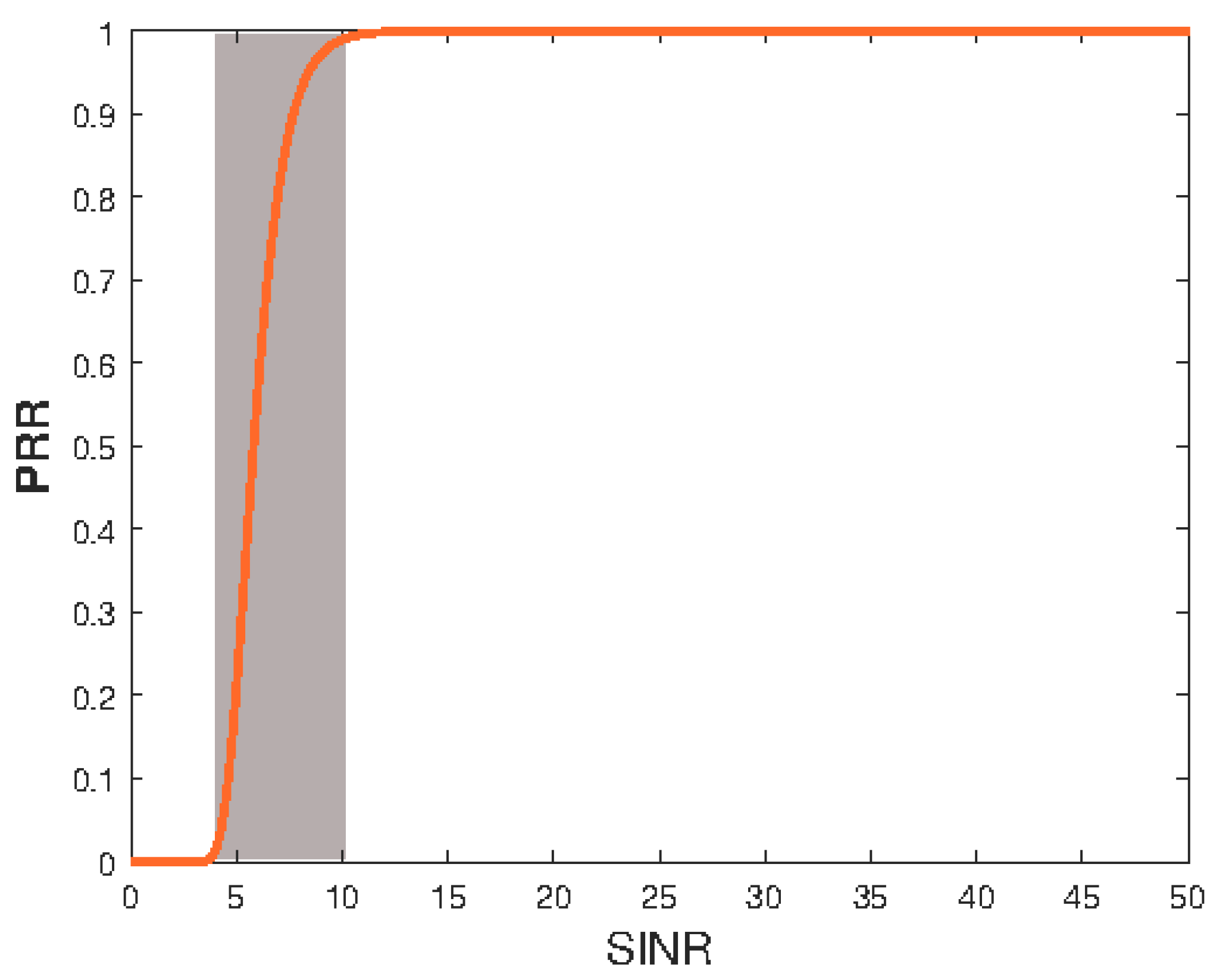
- We devise a new metric that pushes the PRR further down the wireless stack, in particular the PHY layer.
- We form a potential game of the joint power and rate control.
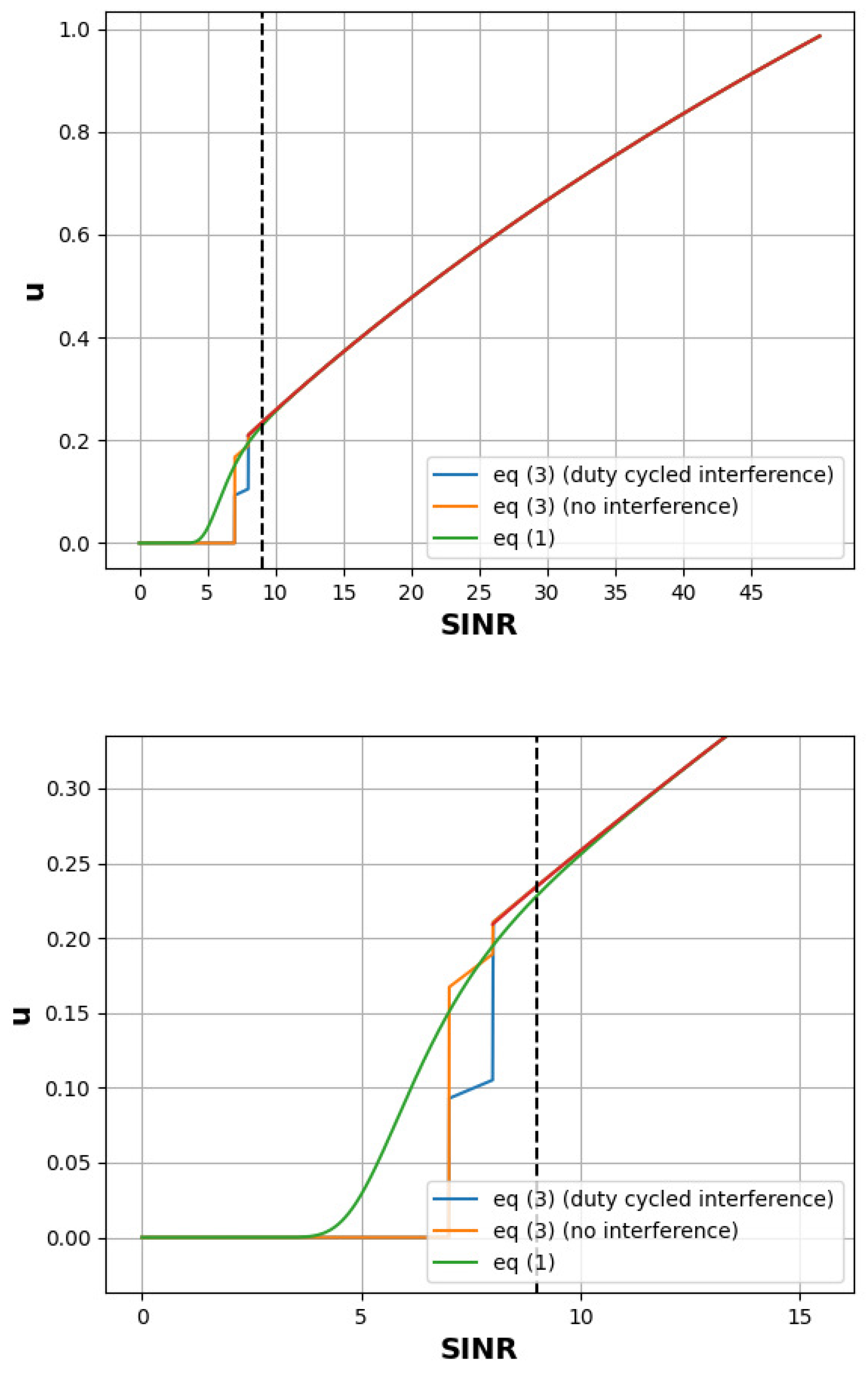
- We identify the best case Nash equilibrium for two cases, namely no or stable interference.
- We show that the price of stability is 1.
- We show that with a stable delay, the utility function is maximised because the rate increases.
- We show that the utility function is concave, and it can be solved in polynomial time.
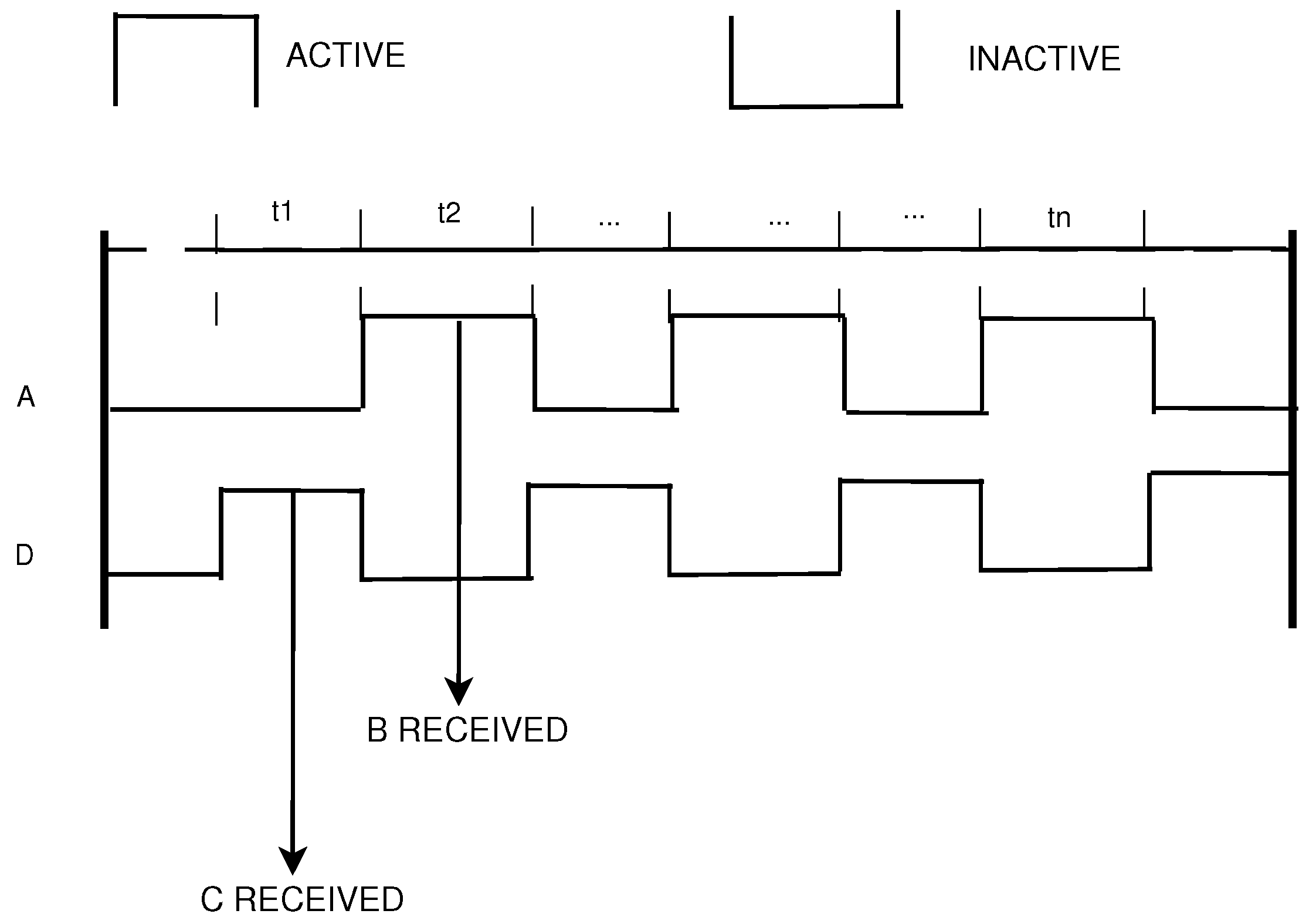
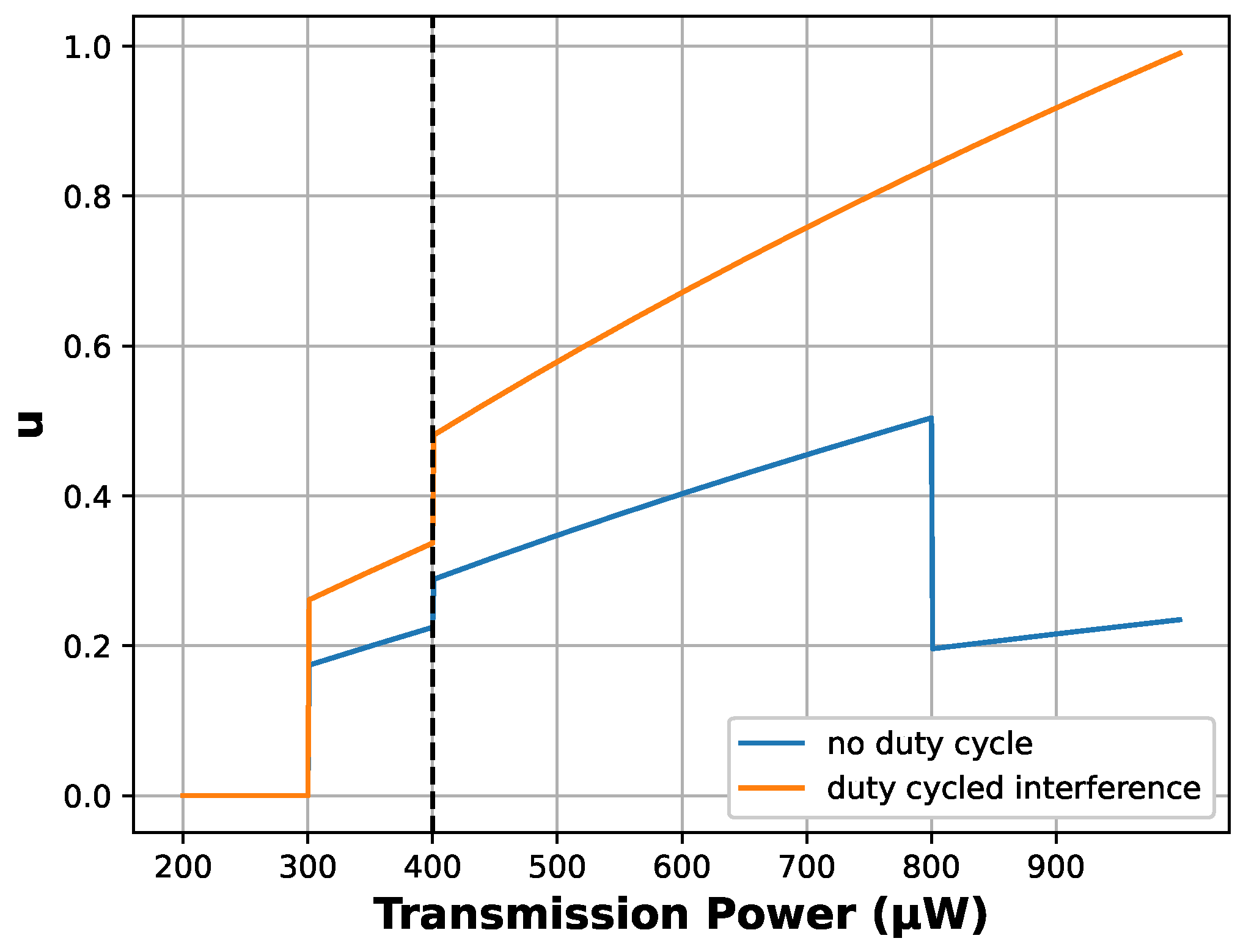
- We indicate the number of time slots and time in seconds that are required for the transmission with and without the duty cycling mechanism.
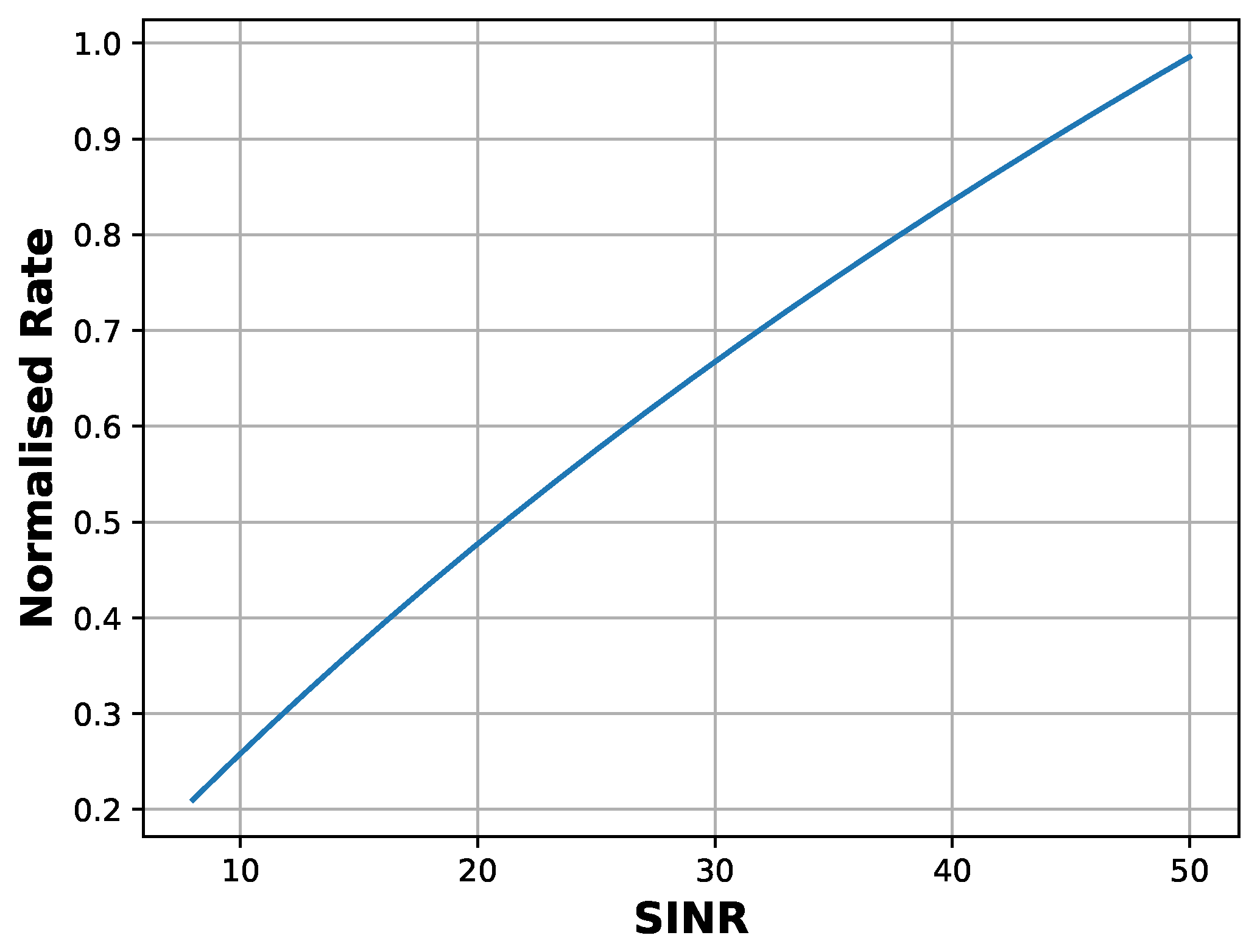
- We show results that we can accomplish a maximum rate and PRR by raising the transmission power, which with duty cycling means increasing the signal-to-interference-plus-noise ratio (SINR).
2. Related Work
3. System Model
3.1. Link Quality Estimator
3.2. Utility Function and Game Formulation

3.3. Nash Equilibrium Properties
4. Numerical Results
4.1. Practical Considerations
- StartReceive: This essentially is the reception of the first packet bit, whose signal strength must exceed the reception threshold for successful reception.
- EndPreamble: This event check is the preamble reception process. It includes specific conditions for the preamble’s reception to be initiated. The state of reception should not be busy; also, the signal strength of the incoming signal should have an SINR larger than the reception threshold to schedule the EndHeader decoding event.
- EndHeader: This decoding event should be aware of the modulation, coding length and parity check of the incoming data. The header information needs to be justifiable to initiate the EndRx decoding event.
- EndRx: During this event, data are decoded by applying signal demodulation and error correction. Moreover, channel estimation is performed to the OFDM samples, and when data are decoded successfully, the RxPhyOk event takes place.
4.2. Evaluation Results
4.3. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Jiang, D.; Delgrossi, L. IEEE 802.11p: Towards an international standard for wireless access in vehicular environments. In Proceedings of the VTC Spring 2008—IEEE Vehicular Technology Conference, Marina Bay, Singapore, 11–14 May 2008; pp. 2036–2040. [Google Scholar]
- IEEE Std 1609.4-2010; Draft Standard for Wireless Access in Vehicular Environments (WAVE)-Multi-Channel Operation. IEEE Standards Association: Piscataway, NJ, USA, 2010.
- Von Neumann, J.; Morgenstern, O. Theory of Games and Economic Behavior; Princeton University Press: Princeton, NJ, USA, 2007. [Google Scholar]
- Daskalakis, C.; Goldberg, P.W.; Papadimitriou, C.H. The complexity of computing a Nash equilibrium. SIAM J. Comput. 2009, 39, 195–259. [Google Scholar] [CrossRef]
- Papadimitriou, C.H. On the complexity of the parity argument and other inefficient proofs of existence. J. Comput. Syst. Sci. 1994, 48, 498–532. [Google Scholar] [CrossRef] [Green Version]
- Monderer, D.; Shapley, L.S. Potential games. Games Econ. Behav. 1996, 14, 124–143. [Google Scholar] [CrossRef]
- Sun, Z.; Liu, Y.; Wang, J.; Li, G.; Anil, C.; Li, K.; Guo, X.; Sun, G.; Tian, D.; Cao, D. Applications of Game Theory in Vehicular Networks: A Survey. IEEE Commun. Surv. Tutor. 2021, 23, 2660–2710. [Google Scholar] [CrossRef]
- Moura, J.; Hutchison, D. Game Theory for Multi-Access Edge Computing: Survey, Use Cases, and Future Trends. IEEE Commun. Surv. Tutor. 2019, 21, 260–288. [Google Scholar] [CrossRef] [Green Version]
- Mkiramweni, M.E.; Yang, C.; Li, J.; Zhang, W. A Survey of Game Theory in Unmanned Aerial Vehicles Communications. IEEE Commun. Surv. Tutor. 2019, 21, 3386–3416. [Google Scholar] [CrossRef]
- Chen, C.; Hu, J.; Zhang, J.; Sun, C.; Zhao, L.; Ren, Z. Information Congestion Control on Intersections in VANETs: A Bargaining Game Approach. In Proceedings of the 2016 IEEE 83rd Vehicular Technology Conference (VTC Spring), Nanjing, China, 15–18 May 2016; pp. 1–5. [Google Scholar] [CrossRef]
- Tielert, T.; Jiang, D.; Hartenstein, H.; Delgrossi, L. Joint power/rate congestion control optimizing packet reception in vehicle safety communications. In Proceedings of the Tenth ACM International Workshop on Vehicular Inter-Networking, Systems, and Applications, Taipei, Taiwan, 25 June 2013; pp. 51–60. [Google Scholar]
- Aygun, B.; Boban, M.; Wyglinski, A.M. ECPR: Environment-and context-aware combined power and rate distributed congestion control for vehicular communications. Comput. Commun. 2016, 93, 3–16. [Google Scholar] [CrossRef] [Green Version]
- Zemouri, S.; Djahel, S.; Murphy, J. Smart adaptation of beacons transmission rate and power for enhanced vehicular awareness in vanets. In Proceedings of the 17th International IEEE Conference on Intelligent Transportation Systems (ITSC), Qingdao, China, 8–11 October 2014; pp. 739–746. [Google Scholar]
- Jose, J.; Li, C.; Wu, X.; Ying, L.; Zhu, K. Distributed rate and power control in vehicular networks. arXiv 2015, arXiv:1511.01535. [Google Scholar]
- Huang, C.L.; Fallah, Y.P.; Sengupta, R.; Krishnan, H. Adaptive intervehicle communication control for cooperative safety systems. IEEE Netw. 2010, 24, 6–13. [Google Scholar] [CrossRef]
- Liu, Z.; Xie, Y.a.; Yuan, Y.; Ma, K.; Chan, K.Y.; Guan, X. Robust power control for clustering-based vehicle-to-vehicle communication. IEEE Syst. J. 2019, 14, 2557–2568. [Google Scholar] [CrossRef]
- Meshkati, F.; Poor, H.V.; Schwartz, S.C.; Balan, R.V. Energy-efficient power and rate control with QoS constraints: A game-theoretic approach. In Proceedings of the 2006 International Conference on Wireless Communications and Mobile Computing, Vancouver, BC, Canada, 3–6 July 2006; pp. 1435–1440. [Google Scholar]
- Spyrou, E.D.; Mitrakos, D. On the Potential Game of Packet Reception Ratio Utility Functions in Wireless Sensor Networks. In Proceedings of the 2021 29th Mediterranean Conference on Control and Automation (MED), Puglia, Italy, 22–25 June 2021; pp. 880–885. [Google Scholar]
- Jayasuriya, A.; Perreau, S.; Dadej, A.; Gordon, S. Hidden vs. Exposed Terminal Problem in ad hoc Networks. In Proceedings of the Australian Telecommunication Networks and Applications Conference, Sydney, Australia, 8–10 December 2004. [Google Scholar]
- Watanabe, Y.; Sato, K.; Fujii, T. Poster: A scheduling method for V2V networks using successive interference cancellation. In Proceedings of the 2016 IEEE Vehicular Networking Conference (VNC), Columbus, OH, USA, 8–10 December 2016; pp. 1–2. [Google Scholar]
- Moscibroda, T.; Wattenhofer, R.; Weber, Y. Protocol design beyond graph-based models. In Proceedings of the ACM Workshop on Hot Topics in Networks (HotNets-V), Irvine, CA, USA, 29–30 November 2006; pp. 25–30. [Google Scholar]
- Gabteni, H.; Hilt, B.; Drouhin, F.; Ledy, J.; Basset, M.; Lorenz, P. A novel predictive link state indicator for ad-hoc networks. In Proceedings of the 2014 IEEE Global Communications Conference, Austin, TX, USA, 8–12 December 2014; pp. 149–154. [Google Scholar]
- Spuhler, M.; Lenders, V.; Giustiniano, D. BLITZ: Wireless link quality estimation in the dark. In Proceedings of the European Conference on Wireless Sensor Networks (EWSN 2013), Ghent, Belgium, 13–15 February 2013; Springer: Berlin/Heidelberg, Germany, 2013; pp. 99–114. [Google Scholar]
- Heinzer, P.; Lenders, V.; Legendre, F. Fast and accurate packet delivery estimation based on DSSS chip errors. In Proceedings of the 2012 IEEE INFOCOM, Orlando, FL, USA, 25–30 March 2012; pp. 2916–2920. [Google Scholar]
- Ledy, J.; Drouhin, F.; Daniel, J.; Basset, M.; Hilt, B.; Gabteni, H.; Lorenz, P. Data fusion for a forecasting link state indicator in vanets. In Proceedings of the 2016 IEEE Global Communications Conference (GLOBECOM), Washington, DC, USA, 4–8 December 2016; pp. 1–6. [Google Scholar]
- Udell, M.; Boyd, S. Maximizing a Sum of Sigmoids. Available online: https://web.stanford.edu/~boyd/papers/pdf/max_sum_sigmoids.pdf (accessed on 2 January 2020).
- Abboud, K.; Omar, H.A.; Zhuang, W. Interworking of DSRC and cellular network technologies for V2X communications: A survey. IEEE Trans. Veh. Technol. 2016, 65, 9457–9470. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Case | Min Slots | Max Slots | Min Time (s) | Max Time (s) |
|---|---|---|---|---|
| Duty Cycled | 10 | 20 | 0.5 | 1 |
| No Duty Cycle | 10 | 60 | 0.5 | 3 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Spyrou, E.D.; Vlachos, E.; Stylios, C. Game-Theoretic Power and Rate Control in IEEE 802.11p Wireless Networks. Electronics 2022, 11, 1618. https://doi.org/10.3390/electronics11101618
Spyrou ED, Vlachos E, Stylios C. Game-Theoretic Power and Rate Control in IEEE 802.11p Wireless Networks. Electronics. 2022; 11(10):1618. https://doi.org/10.3390/electronics11101618
Chicago/Turabian StyleSpyrou, Evangelos D., Evangelos Vlachos, and Chrysostomos Stylios. 2022. "Game-Theoretic Power and Rate Control in IEEE 802.11p Wireless Networks" Electronics 11, no. 10: 1618. https://doi.org/10.3390/electronics11101618
APA StyleSpyrou, E. D., Vlachos, E., & Stylios, C. (2022). Game-Theoretic Power and Rate Control in IEEE 802.11p Wireless Networks. Electronics, 11(10), 1618. https://doi.org/10.3390/electronics11101618