
High-Speed Control of AC Servo Motor Using High-Performance RBF Neural Network Terminal Sliding Mode Observer and Single Current Reconstructed Technique


Abstract
:1. Introduction
2. Permanent Magnet Synchronous Motor Control Technique
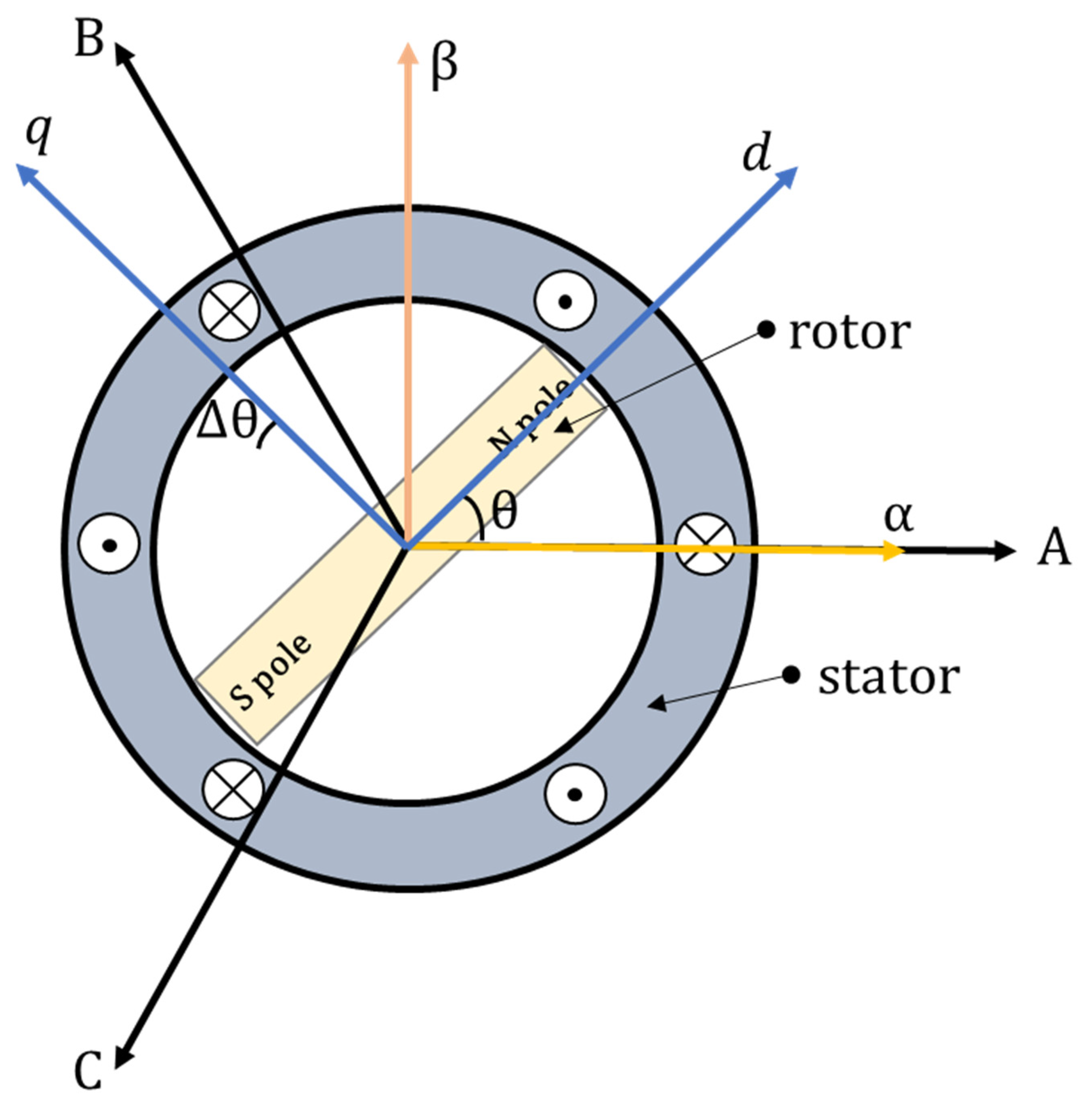
2.1. Mathematical Model of Surface Permanent Magnet Synchronous Motor
- The study object in this paper is surface-mounted PMSM;
- The waveform of induced electromotive force in the three-phase coil is sinusoidal;
- The electrical conductivity of permanent magnet material is zero;
- The magnetic conductivity inside the permanent magnet is equal to the value in the air;
- Ignoring the core reluctant, eddy-current loss, magnetic hysteresis loss, and core saturation effect.
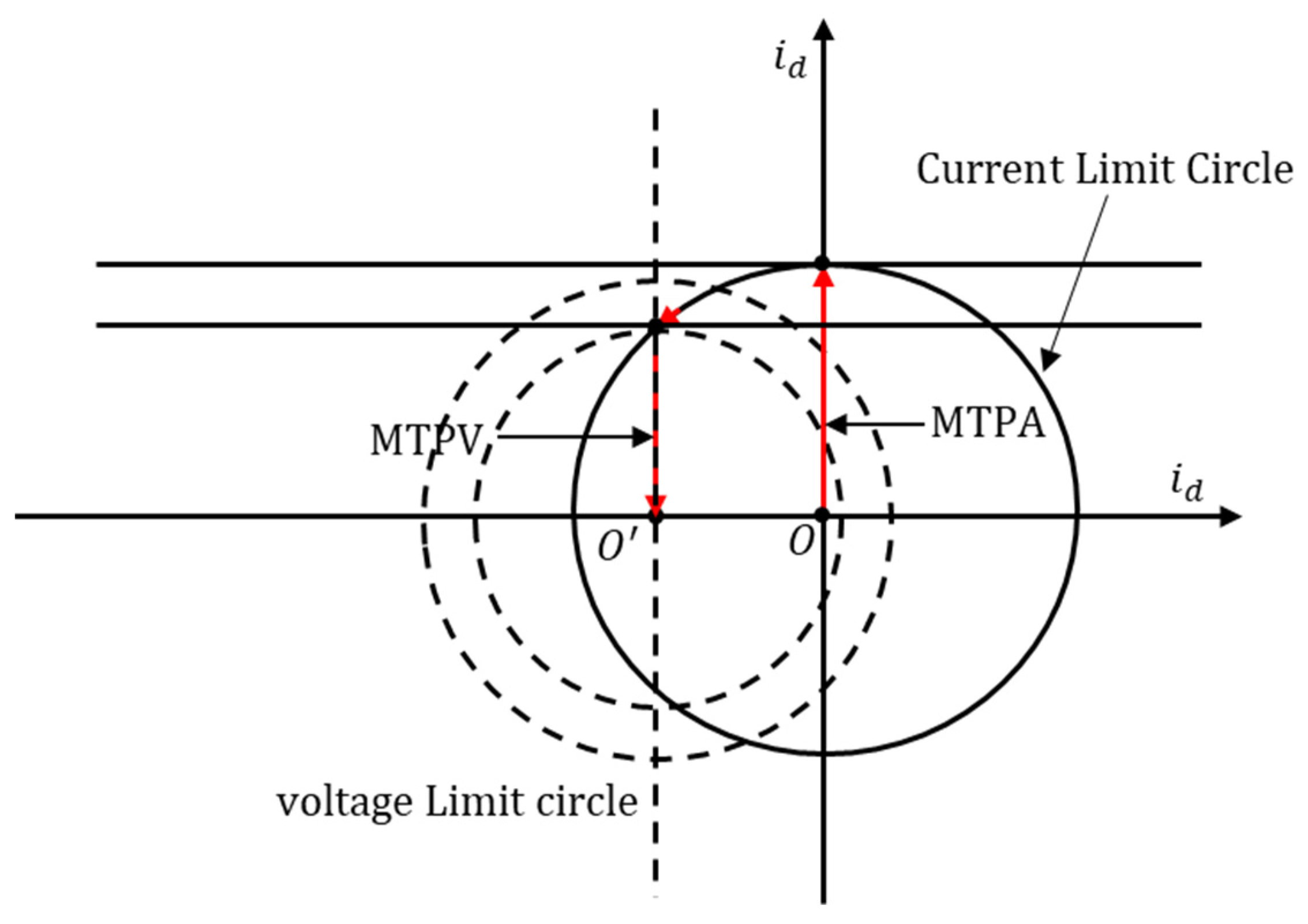
2.2. SPMSM Sensorless Control Technique in High Speed Region
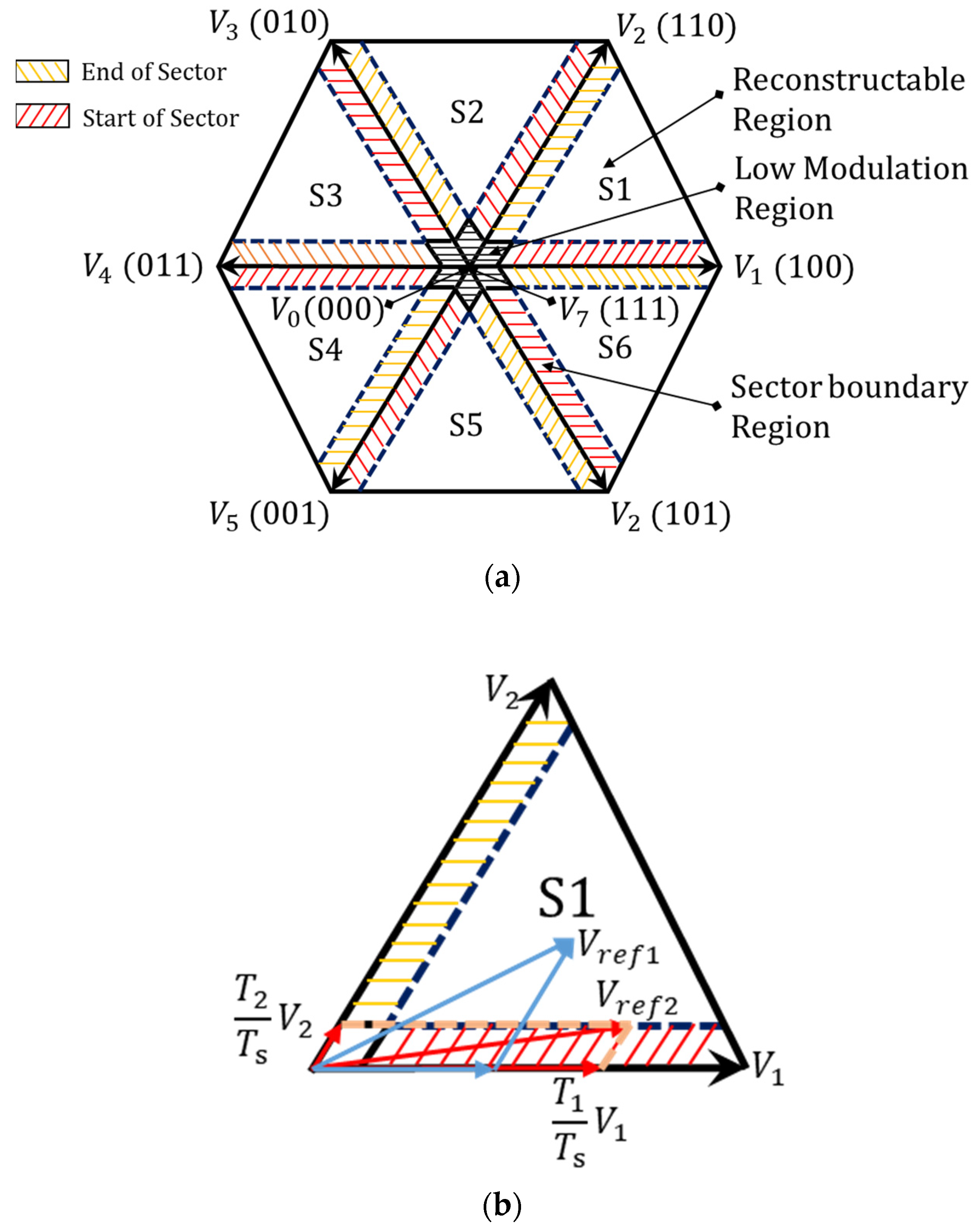
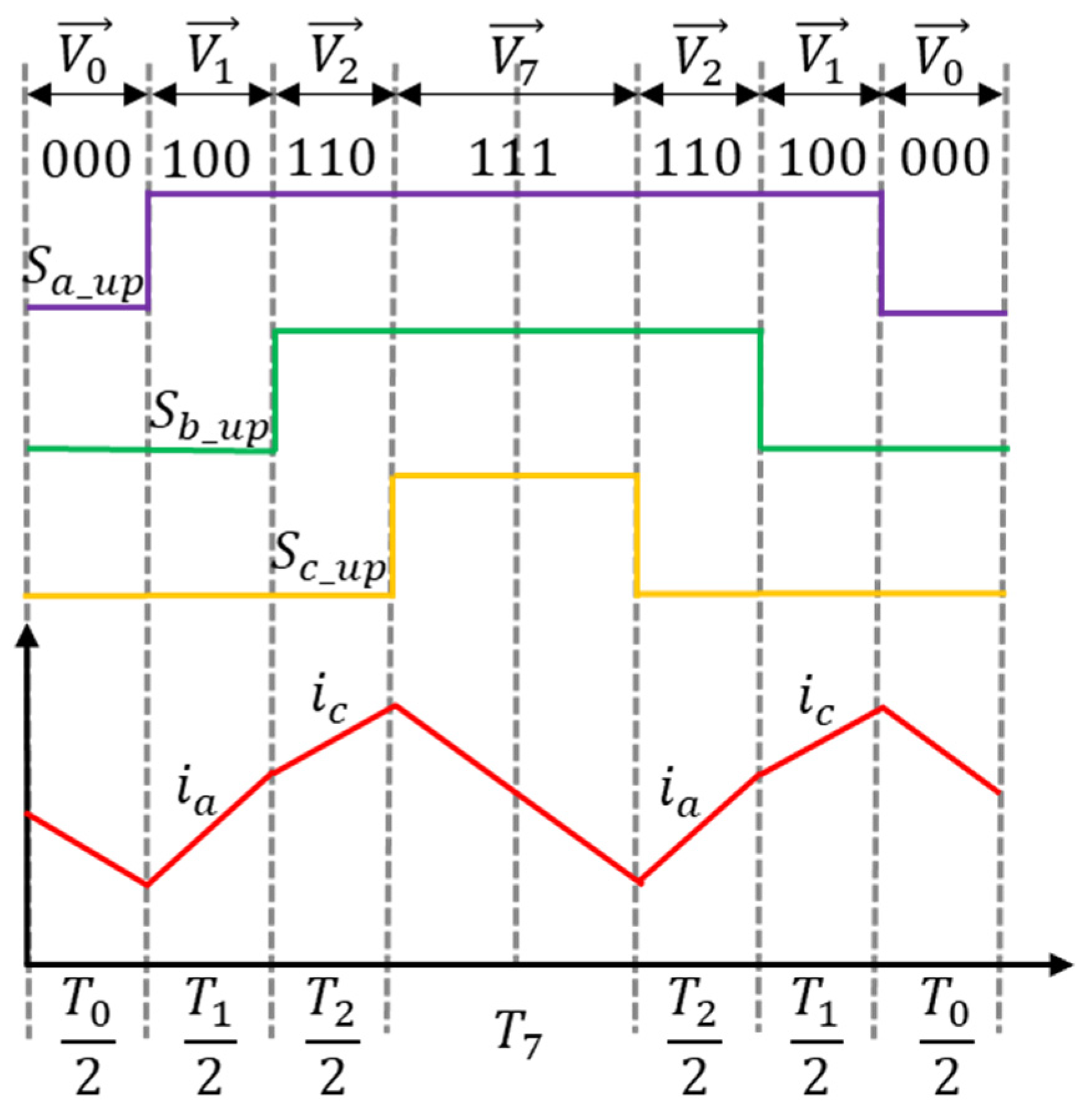
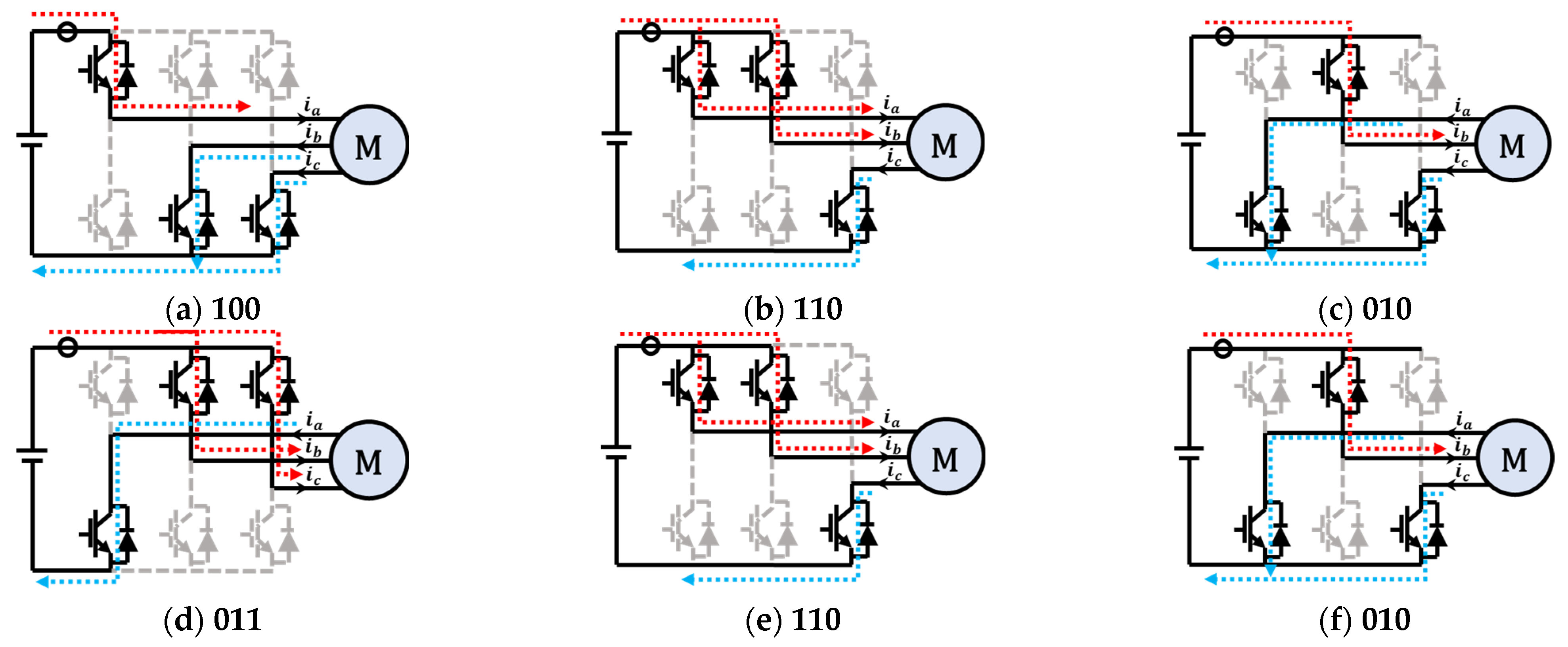
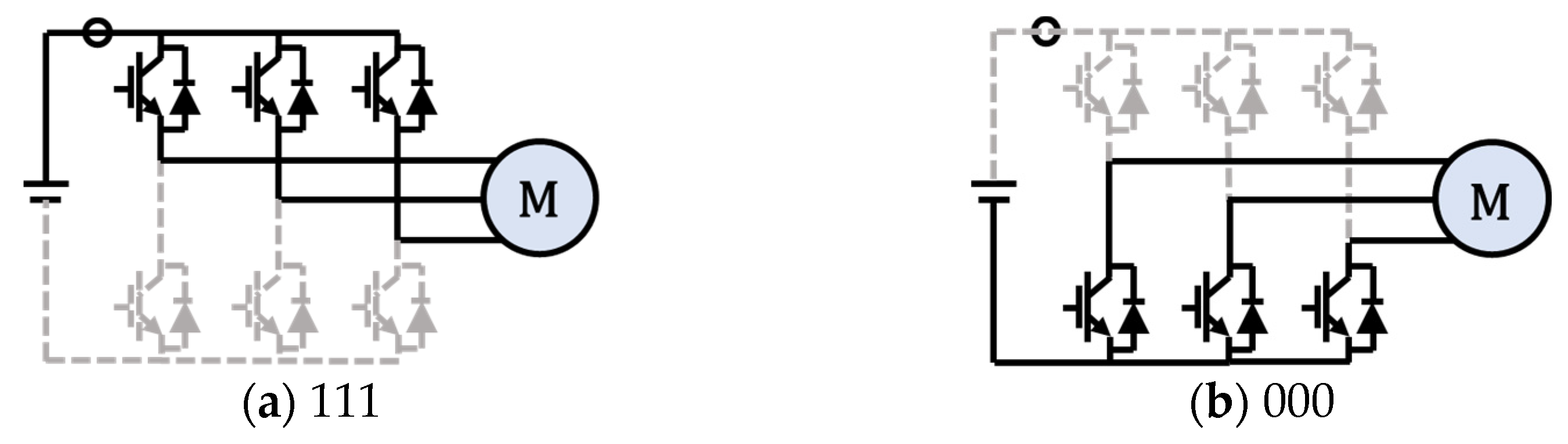
3. Current Reconstruction Methods Using Single Resistance Sensor
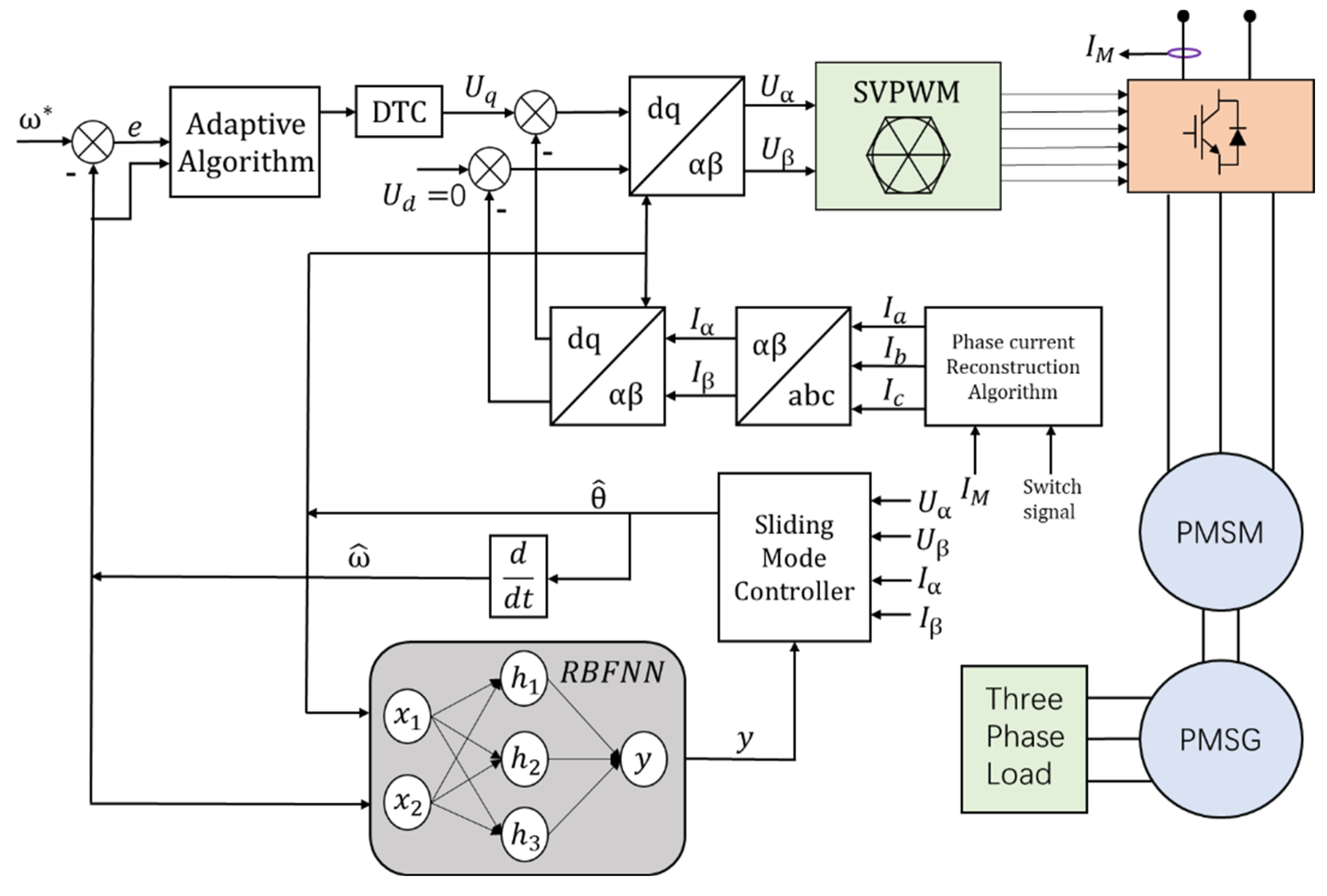
4. Sensorless Control Technique Using Terminal Sliding Mode Controller and RBF Neural Network
4.1. Adaptive Terminal Sliding Mode Control Method
4.2. Design of Terminal Adaptive Sliding Mode Controller Based on RBF Neural Network
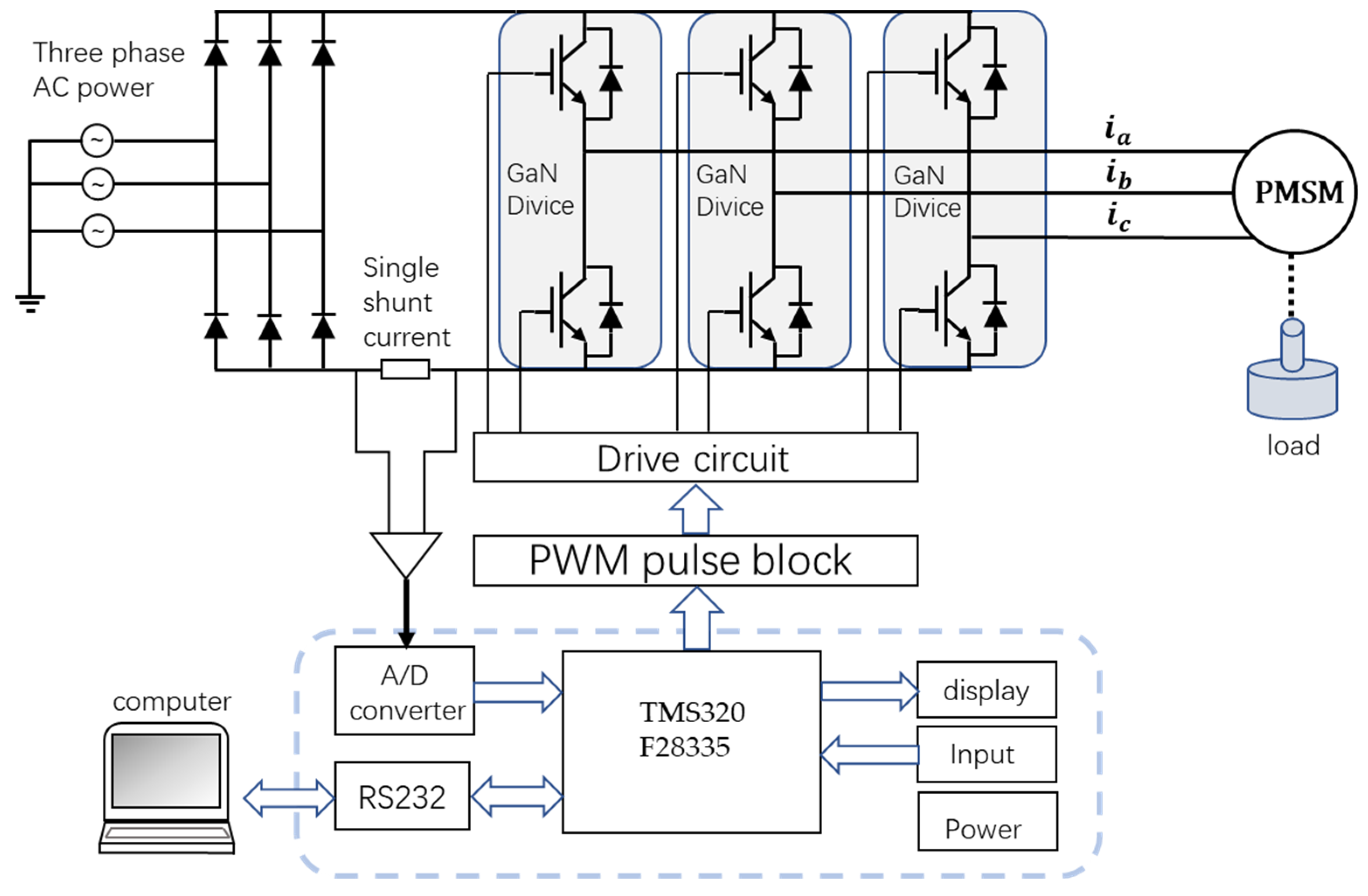
5. Hardware Design of Control System
6. Simulation and Experiment Verification
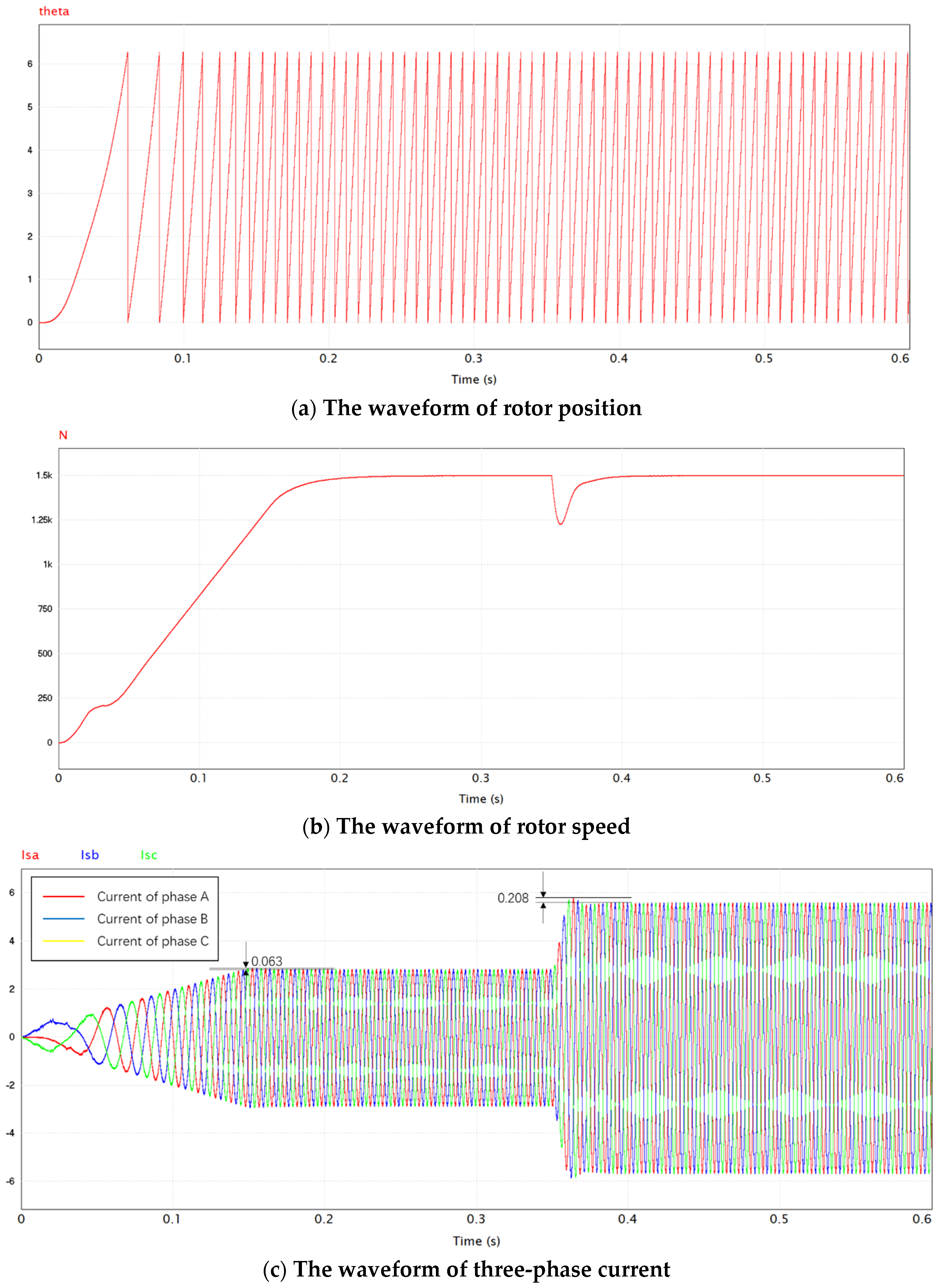
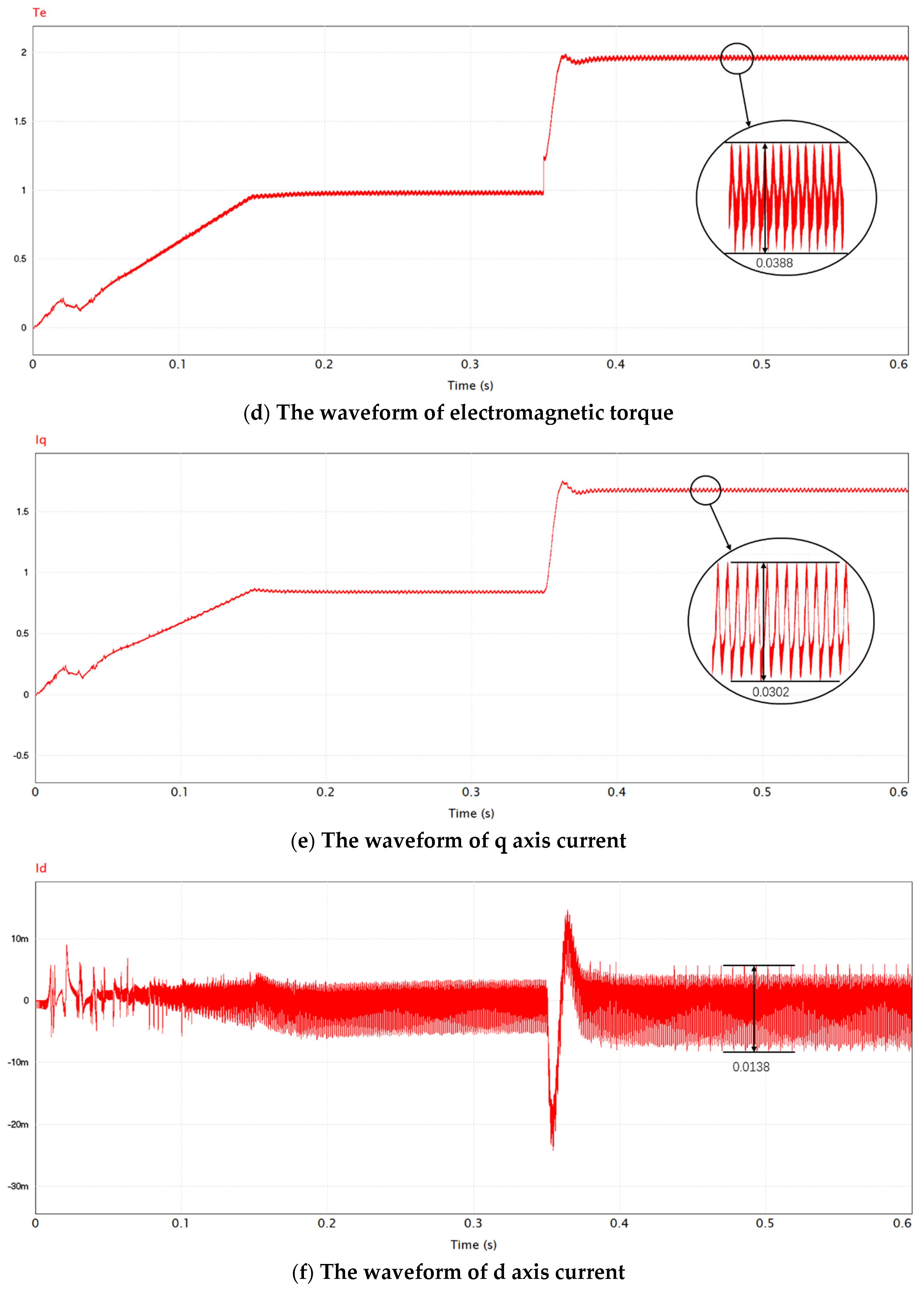
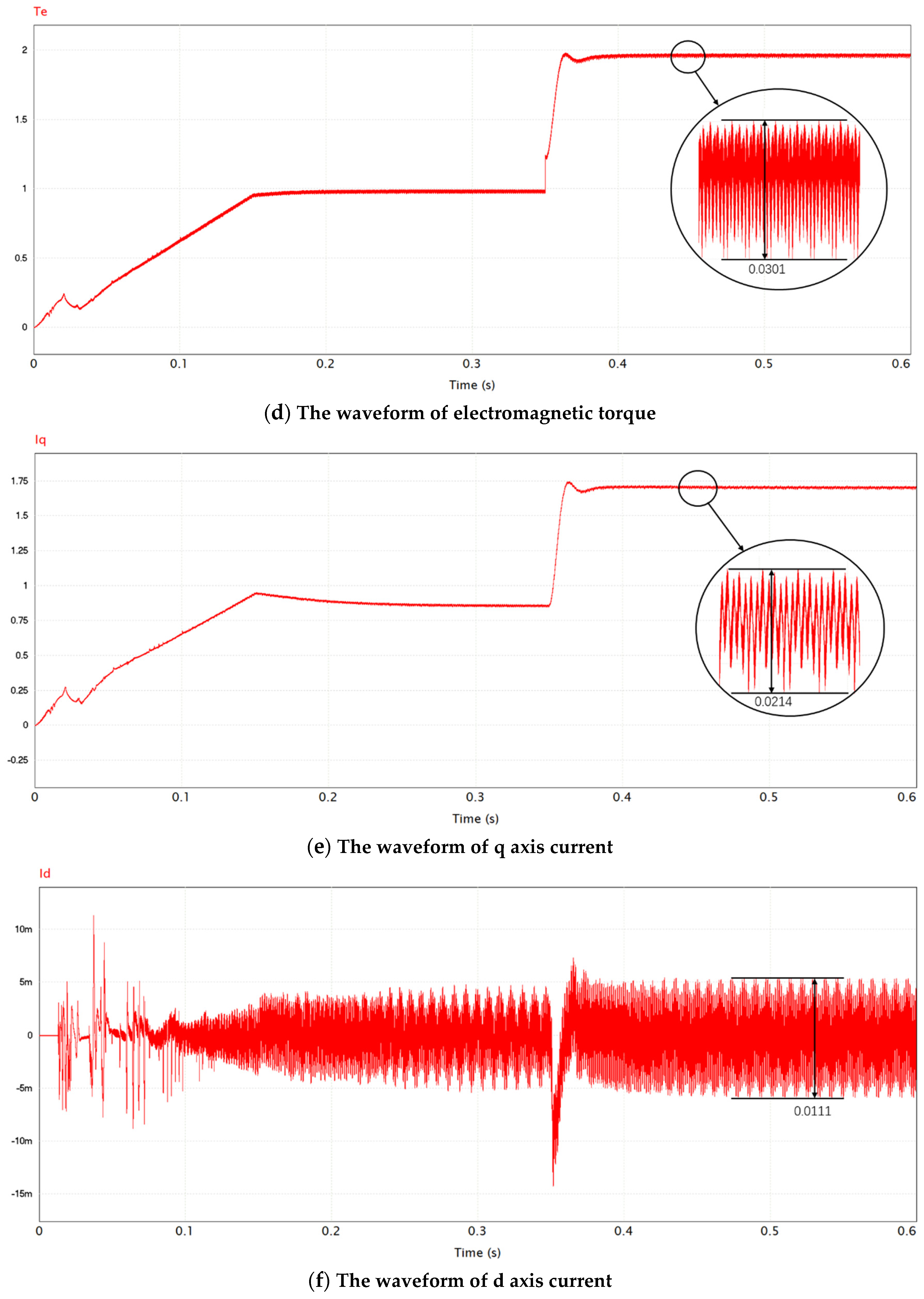
6.1. Simulation Results
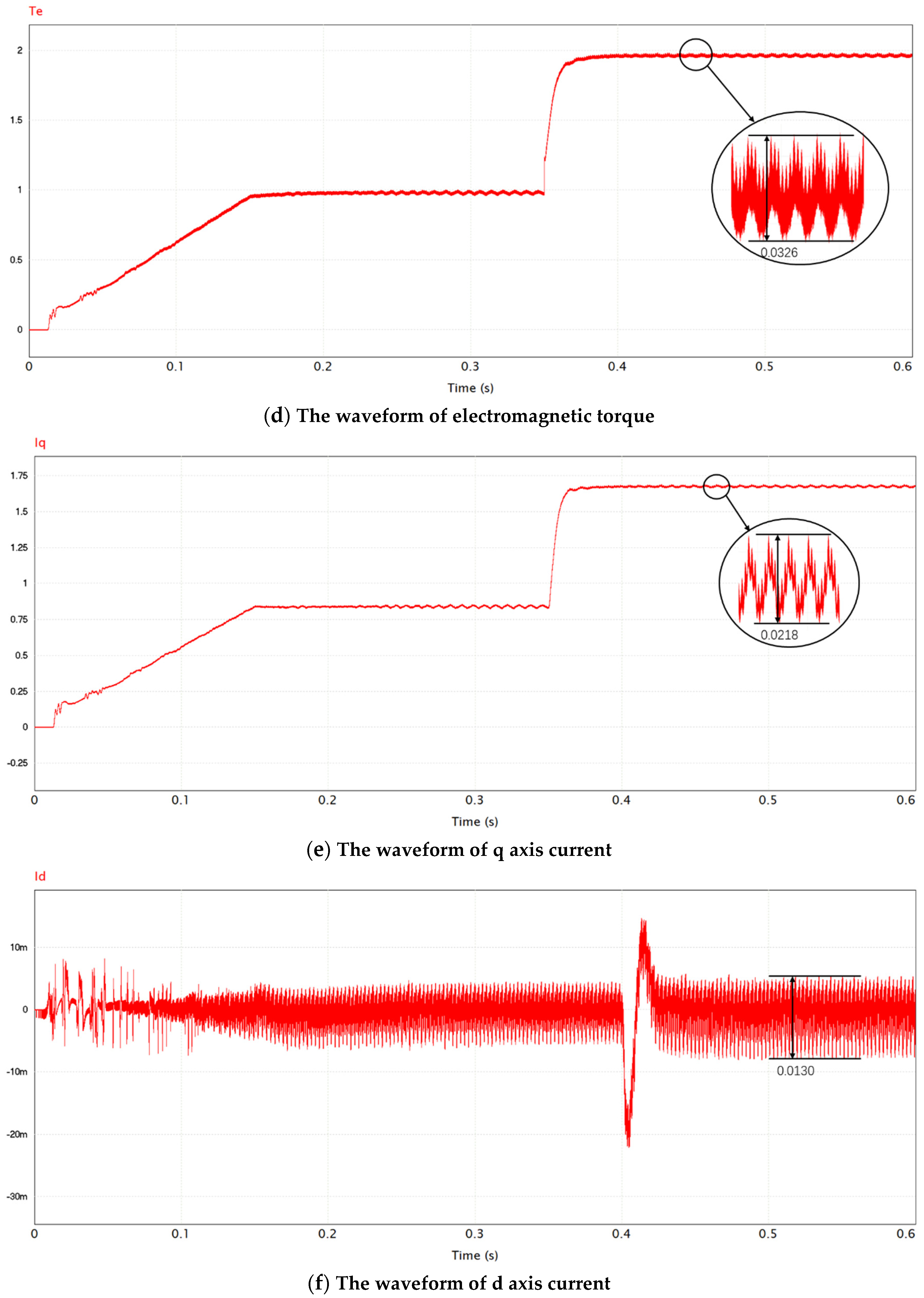
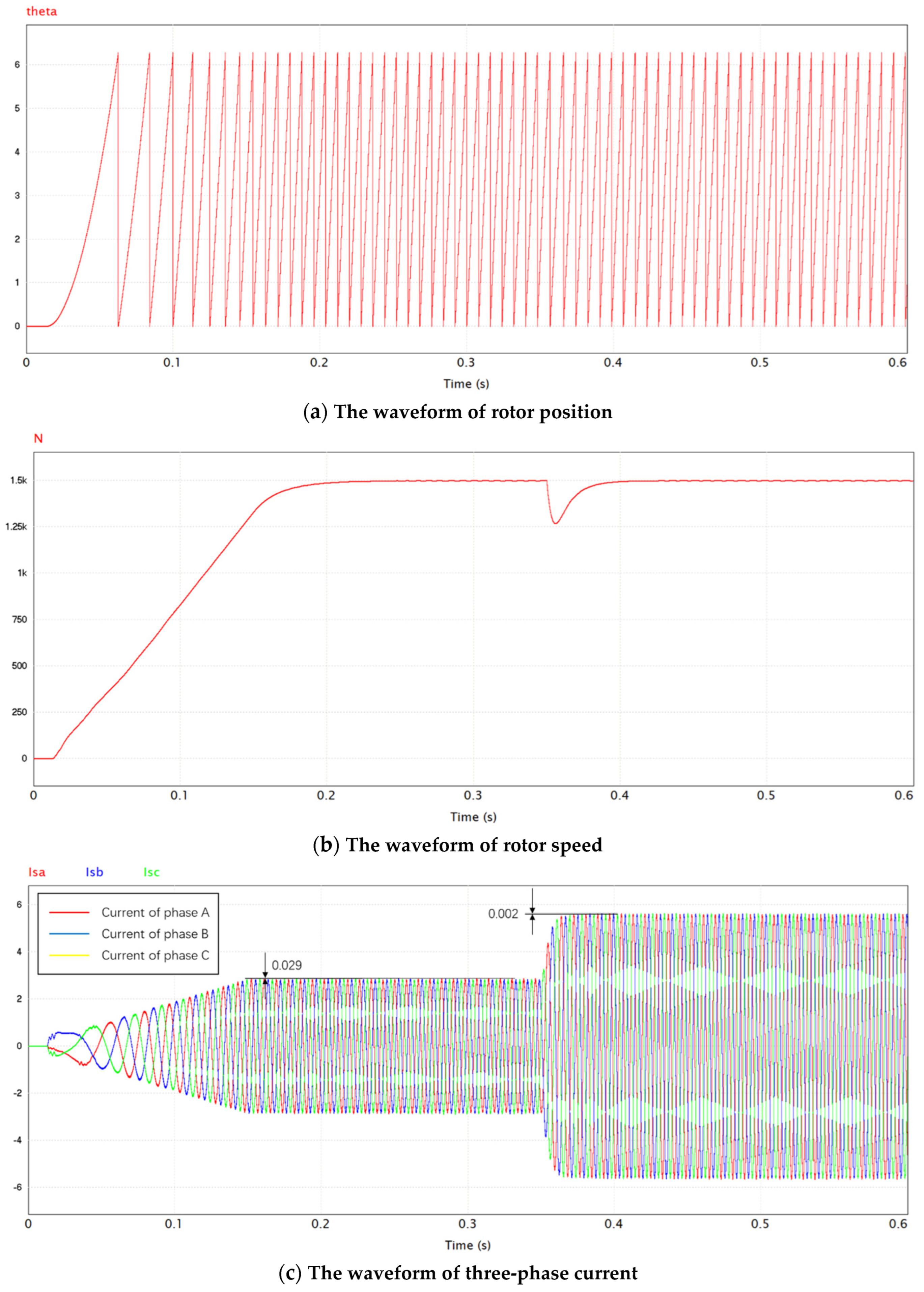
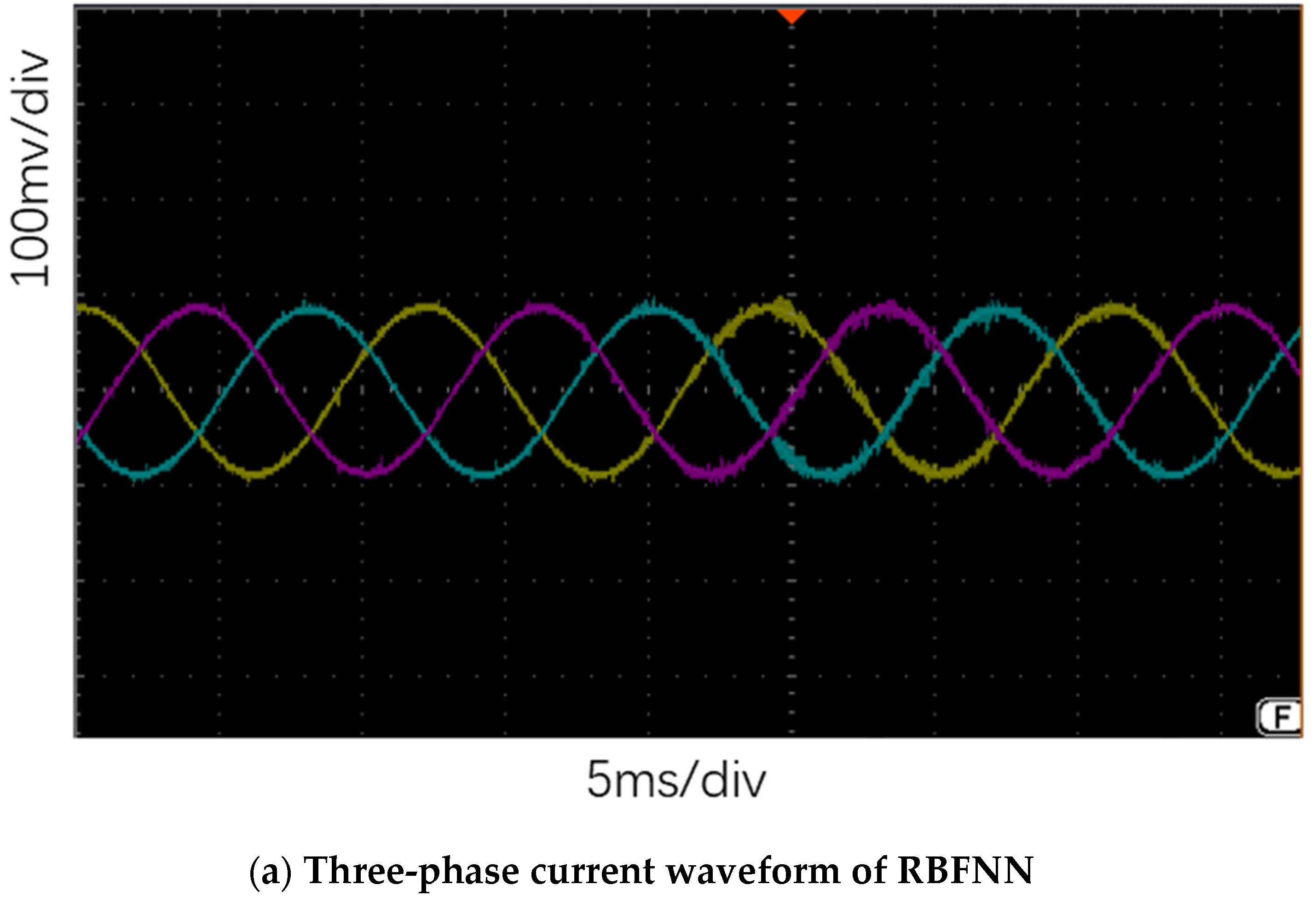
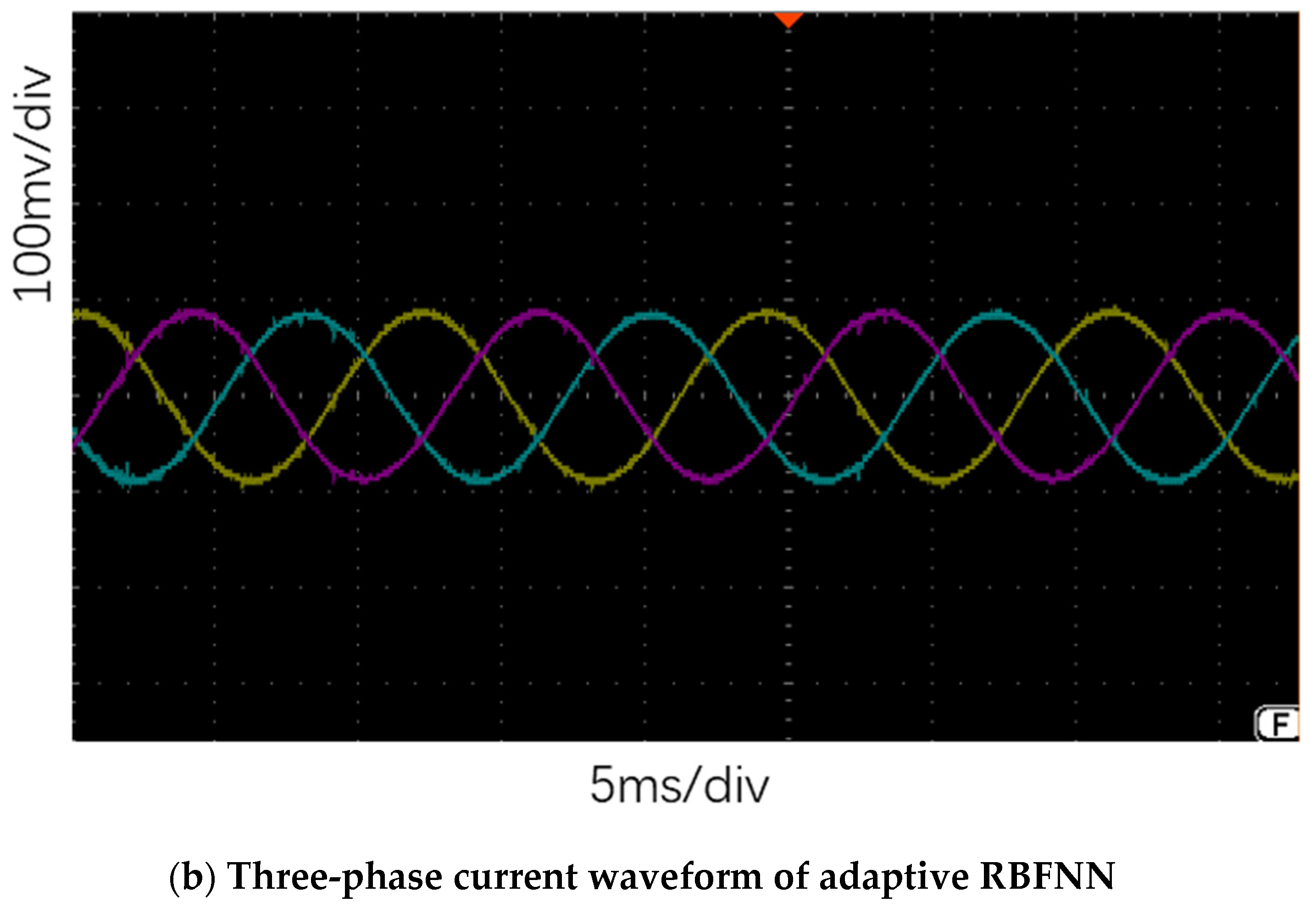
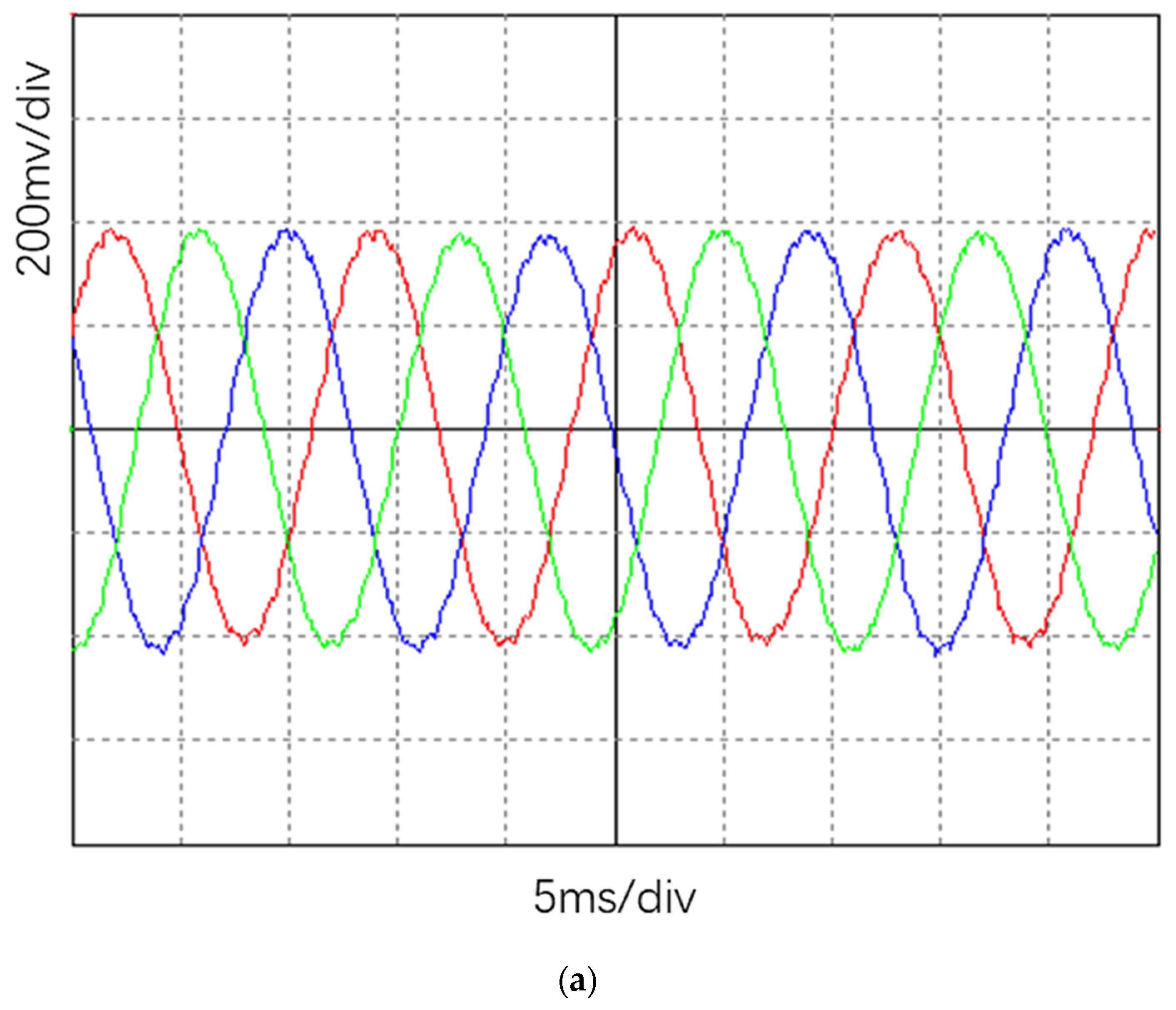
6.2. Experiment Results
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Xiao, S.; Shi, T.; Li, X.; Wang, Z.; Xia, C. Single-Current-Sensor Control for PMSM Driven by Quasi-Z-Source Inverter. IEEE Trans. Power Electron. 2019, 34, 7013–7024. [Google Scholar] [CrossRef]
- Wang, W.; Yan, H.; Xu, Y.; Zou, J.; Zhang, X.; Zhao, W.; Buticchi, G.; Gerada, C. New Three-Phase Current Reconstruction for PMSM Drive with Hybrid Space Vector Pulsewidth Modulation Technique. IEEE Trans. Power Electron. 2021, 36, 662–673. [Google Scholar] [CrossRef]
- Tang, Q.; Shen, A.; Li, W.; Luo, P.; Chen, M.; He, X. Multiple-Positions-Coupled Sampling Method for PMSM Three-Phase Current Reconstruction With a Single Current Sensor. IEEE Trans. Power Electron. 2020, 35, 699–708. [Google Scholar] [CrossRef]
- Wang, W.; Yan, H.; Xu, Y.; Zou, J.; Buticchi, G. Improved Three-Phase Current Reconstruction Technique for PMSM Drive with Current Prediction. IEEE Trans. Ind. Electron. 2022, 69, 3449–3459. [Google Scholar] [CrossRef]
- Jin, S.; Gu, J.; Jin, W.; Zhang, Z.; Zhang, F. Sensorless Control of Low Speed PMSM Based on Novel Sliding Mode Observer. In Proceedings of the 2021 IEEE 4th International Electrical and Energy Conference (CIEEC), Wuhan, China, 17 August 2021; pp. 1–5. [Google Scholar] [CrossRef]
- Ilioudis, V.C.; Margaris, N.I. Sensorless Sliding Mode Observer based on rotor position error for salient-pole PMSM. In Proceedings of the 2009 17th Mediterranean Conference on Control and Automation, Thessaloniki, Greece, 24–26 June 2009; pp. 1517–1522. [Google Scholar] [CrossRef]
- Zhou, Q.; Zhang, Y.; He, H.; Li, W.; Qi, X. Study on Location Detection of PMSM Rotor Based on Sliding Mode Observer. In Proceedings of the 2016 International Symposium on Computer, Consumer and Control (IS3C), Xi’an, China, 4–6 July 2016; pp. 77–80. [Google Scholar] [CrossRef]
- Yang, C.; Ma, T.; Che, Z.; Zhou, L. An Adaptive-Gain Sliding Mode Observer for Sensorless Control of Permanent Magnet Linear Synchronous Motors. IEEE Access 2018, 6, 3469–3478. [Google Scholar] [CrossRef]
- Liang, D.; Li, J.; Qu, R.; Kong, W. Adaptive Second-Order Sliding-Mode Observer for PMSM Sensorless Control Considering VSI Nonlinearity. IEEE Trans. Power Electron. 2018, 33, 8994–9004. [Google Scholar] [CrossRef]
- Qiao, Z.; Shi, T.; Wang, Y.; Yan, Y.; Xia, C.; He, X. New Sliding-Mode Observer for Position Sensorless Control of Permanent-Magnet Synchronous Motor. IEEE Trans. Ind. Electron. 2013, 60, 710–719. [Google Scholar] [CrossRef]
- Ye, S.; Yao, X. An Enhanced SMO-Based Permanent-Magnet Synchronous Machine Sensorless Drive Scheme With Current Measurement Error Compensation. IEEE J. Emerg. Sel. Top. Power Electron. 2021, 9, 4407–4419. [Google Scholar] [CrossRef]
- Kivanc, O.C.; Ozturk, S.B. Sensorless PMSM Drive Based on Stator Feedforward Volt-age Estimation Improved With MRAS Multiparameter Estimation. IEEE/ASME Trans. Mechatron. 2018, 23, 1326–1337. [Google Scholar] [CrossRef]
- Zhang, Z.; Liu, Y.; Liang, W.; Peng, J. MRAS Sensorless Control Strategy of PMSM based on SiC-MOSFET Three-Phase Inverter. In Proceedings of the 2020 IEEE 9th International Power Electronics and Motion Control Conference (IPEMC2020-ECCE Asia), Nanjing, China, 29 November–2 December 2020; pp. 1488–1492. [Google Scholar] [CrossRef]
- Ouyang, Y.; Dou, Y. Speed Sensorless Control of PMSM Based on MRAS Parameter Identification. In Proceedings of the 2018 21st International Conference on Electrical Machines and Systems (ICEMS), Jeju, Korea, 7–10 October 2018; pp. 1618–1622. [Google Scholar] [CrossRef]
- Ni, Y.; Shao, D. Research of Improved MRAS Based Sensorless Control of Permanent Magnet Synchronous Motor Considering Parameter Sensitivity. In Proceedings of the 2021 IEEE 4th Advanced Information Management, Communicates, Electronic and Automation Control Conference (IMCEC), Chongqing, China, 18–20 June 2021; pp. 633–638. [Google Scholar] [CrossRef]
- Badini, S.S.; Verma, V. A Novel MRAS Based Speed Sensorless Vector Controlled PMSM Drive. In Proceedings of the 2019 54th International Universities Power Engineering Conference (UPEC), Bucharest, Romania, 3–6 September 2019; pp. 1–6. [Google Scholar] [CrossRef]
- Wang, Z.; Zheng, Y.; Zou, Z.; Cheng, M. Position Sensorless Control of Interleav-ed CSI Fed PMSM Drive with Extended Kalman Filter. IEEE Trans. Magn. 2012, 48, 3688–3691. [Google Scholar] [CrossRef]
- Zwerger, T.; Mercorelli, P. Combining SMC and MTPA Using an EKF to Estimate Parameters and States of an Interior PMSM. In Proceedings of the 2019 20th International Carpathian Control Conference (ICCC), Krakow-Wieliczka, Poland, 26–29 May 2019; pp. 1–6. [Google Scholar] [CrossRef]
- Yang, H.; Yang, R.; Hu, W.; Huang, Z. FPGA-Based Sensorless Speed Control of PMSM Using Enhanced Performance Controller Based on the Reduced-Order EKF. IEEE J. Emerg. Sel. Top. Power Electron. 2021, 9, 289–301. [Google Scholar] [CrossRef]
- Tondpoor, K.; Saghaiannezhad, S.M.; Rashidi, A. Sensorless Control of PMSM Using Simplified Model Based on Extended Kalman Filter. In Proceedings of the 2020 11th Power Electronics, Drive Systems, and Technologies Conference (PEDSTC), Tehran, Iran, 4–6 February 2020; pp. 1–5. [Google Scholar] [CrossRef]
- Dai, Y.; Ye, C.; Zhao, S.; Yu, D.; Dian, R. EKF for Three-Vector Model Predictive Current Control of PMSM. In Proceedings of the 2020 IEEE 1st China International Youth Conference on Electrical Engineering (CIYCEE), Wuhan, China, 1–4 November 2020; pp. 1–6. [Google Scholar] [CrossRef]
- Li, W.; Wen, X.; Zhang, J. Comparison of MRAS and SMO method for sensorless PMSM drives. In Proceedings of the 2019 22nd International Conference on Electrical Machines and Systems (ICEMS), Harbin, China, 11–14 August 2019; pp. 1–4. [Google Scholar] [CrossRef]
- Li, X.; Kennel, R. General Formulation of Kalman-Filter-Based Online Parame-ter Identification Methods for VSI-Fed PMSM. IEEE Trans. Ind. Electron. 2021, 68, 2856–2864. [Google Scholar] [CrossRef]
- Smidl, V.; Peroutka, Z. Advantages of Square-Root Extended Kalman Filter for Sensorless Control of AC Drives. IEEE Trans. Ind. Electron. 2012, 59, 4189–4196. [Google Scholar] [CrossRef]
- Zhou, C.; Zhou, Z.; Tang, W.; Yu, Z.; Sun, X. Improved Sliding-Mode Observer for Posi-tion Sensorless Control of PMSM. In Proceedings of the 2018 Chinese Automation Congress (CAC), Xi’an, China, 30 November–2 December 2018; pp. 2374–2378. [Google Scholar] [CrossRef]
- Gao, T.; Zhou, Y.; Huang, J.; Wang, W.; Chen, G. A sliding-mode observer design for the unknown disturbance estimation of a PMSM. In Proceedings of the 27th Chinese Control and Decision Conference (2015 CCDC), Qingdao, China, 23–25 May 2015; pp. 5851–5855. [Google Scholar] [CrossRef]
- Ilioudis, V.C.; Margaris, N.I. PMSM sensorless speed estimation based on sliding mode observers. In Proceedings of the 2008 IEEE Power Electronics Specialists Conference, Rhodes, Greece, 15–19 June 2008; pp. 2838–2843. [Google Scholar] [CrossRef]
- Okte, M. Sathans Sliding-mode observer for estimating position and speed and mini-mizing ripples in rotor parameters of PMSM. In Proceedings of the 2018 2nd International Conference on Inventive Systems and Control (ICISC), Coimbatore, India, 19–20 January 2018; pp. 506–511. [Google Scholar] [CrossRef]
- Ilioudis, V.C.; Margaris, N.I. Sensorless speed and position estimation of PMSM using sliding mode observers in γ-δ reference frame. In Proceedings of the 2008 16th Mediterranean Conference on Control and Automation, Ajaccio, France, 25–27 June 2008; pp. 641–646. [Google Scholar] [CrossRef]
- Qi, L.; Jia, T.; Shi, H. A novel sliding mode observer for PMSM sensorless vector control. In Proceedings of the 2011 IEEE International Conference on Mechatronics and Automation, Beijing, China, 7–10 August 2011; pp. 1646–1650. [Google Scholar] [CrossRef]
- Zhang, X.; Li, Z. Sliding-Mode Observer-Based Mechanical Parameter Estimation for Permanent Magnet Synchronous Motor. IEEE Trans. Power Electron. 2016, 31, 5732–5745. [Google Scholar] [CrossRef]
- Longfei, J.; Yuping, H.; Jigui, Z.; Jing, C.; Yunfei, T.; Pengfei, L. Fuzzy Sliding Mode Control of Permanent Magnet Synchronous Motor Based on the Integral Sliding Mode Surface. In Proceedings of the 2019 22nd International Conference on Electrical Machines and Systems (ICEMS), Harbin, China, 11–14 August 2019; pp. 1–6. [Google Scholar] [CrossRef]
- Li, W.; Du, Z.; Wang, W.; Wu, W. Composite Fractional Order Sliding Mode Control of Permanent Magnet Synchronous Motor Based on Disturbance Observer. In Proceedings of the 2019 Chinese Automation Congress (CAC), Hangzhou, China, 22–24 November 2019; pp. 4012–4016. [Google Scholar] [CrossRef]
- Xu, C.; Wang, K.; Yang, X.; Zhang, B. Terminal Sliding Mode Control of Permanent Magnet Synchronous Motor Based on a Novel Adaptive Reaching Law. In Proceedings of the 2021 IEEE 4th Advanced Information Management, Communicates, Electronic and Automation Control Conference (IMCEC), Chongqing, China, 18–20 June 2021; pp. 1731–1735. [Google Scholar] [CrossRef]
- Hou, H.; Yu, X.; Xu, L.; Rsetam, K.; Cao, Z. Finite-Time Continuous Terminal Sliding Mode Control of Servo Motor Systems. IEEE Trans. Ind. Electron. 2020, 67, 5647–5656. [Google Scholar] [CrossRef]
- Junejo, A.K.; Xu, W.; Mu, C.; Ismail, M.M.; Liu, Y. Adaptive Speed Control of PMSM Drive System Based a New Sliding-Mode Reaching Law. IEEE Trans. Power Electron. 2020, 35, 12110–12121. [Google Scholar] [CrossRef]
- El-Sousy, F.F.M.; Amin, M.; Mohammed, O.A. High-Precision Adaptive Back-stepping Optimal Control using RBFN for PMSM-Driven Linear Motion Stage. In Proceedings of the 2019 IEEE International Electric Machines & Drives Conference (IEMDC), San Diego, CA, USA, 12–15 May 2019; pp. 1680–1687. [Google Scholar] [CrossRef]
- Jiao, L.; Zhang, P.; Min, R.; Luo, Y.; Yang, D. Research on PMSM Sensorless Control Based on Improved RBF Neural Network Algorithm. In Proceedings of the 2018 37th Chinese Control Conference (CCC), Wuhan, China, 25–27 July 2018; pp. 2933–2938. [Google Scholar] [CrossRef]






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Voltage Vector | Up Switches | |
|---|---|---|
| 000 | 0 | |
| 100 | ||
| 110 | ||
| 010 | ||
| 011 | ||
| 001 | ||
| 101 | ||
| 111 | 0 |
| Rated Voltage | 48 V |
| Rated Speed | 1000 RPM |
| Rated Power | 1 kW |
| Rated Torque | 3.18 N |
| Stator Resistance | 0.2 Ω |
| Pole | 6 poles |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, H.; Cai, C. High-Speed Control of AC Servo Motor Using High-Performance RBF Neural Network Terminal Sliding Mode Observer and Single Current Reconstructed Technique. Electronics 2022, 11, 1646. https://doi.org/10.3390/electronics11101646
Chen H, Cai C. High-Speed Control of AC Servo Motor Using High-Performance RBF Neural Network Terminal Sliding Mode Observer and Single Current Reconstructed Technique. Electronics. 2022; 11(10):1646. https://doi.org/10.3390/electronics11101646
Chicago/Turabian StyleChen, Huaizhi, and Changxin Cai. 2022. "High-Speed Control of AC Servo Motor Using High-Performance RBF Neural Network Terminal Sliding Mode Observer and Single Current Reconstructed Technique" Electronics 11, no. 10: 1646. https://doi.org/10.3390/electronics11101646
APA StyleChen, H., & Cai, C. (2022). High-Speed Control of AC Servo Motor Using High-Performance RBF Neural Network Terminal Sliding Mode Observer and Single Current Reconstructed Technique. Electronics, 11(10), 1646. https://doi.org/10.3390/electronics11101646