
Research on the Sequential Difference Histogram Failure Principle Applied to the Signal Design of Radio Frequency Stealth Radar

Abstract
:1. Introduction
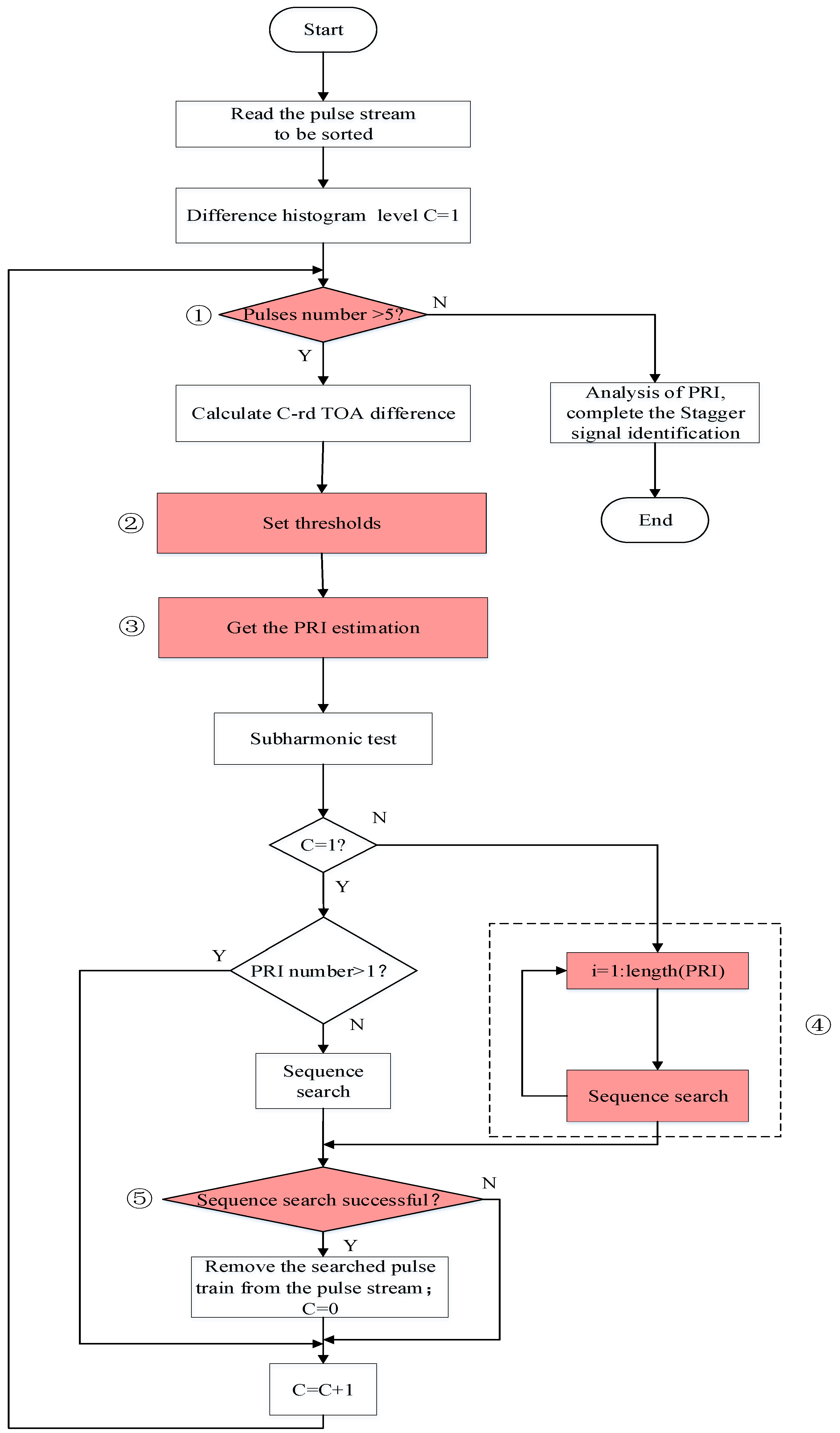
2. SDIF Algorithm
3. SDIF Sorting Failure Principle
3.1. Failure Principle of SDIF Sorting Based on PRI Estimation
3.1.1. The Difference between the Center Values of Two Groups’ Radar Signals Is Greater than the Tolerance
3.1.2. The Difference between the Center Values of Two Groups’ Radar Signals Is Greater than the Tolerance
- ①
- The elements of the signal PRI variation set are all 0
- ②
- The elements of the signal PRI variation set are a finite sequence of values
- a
- The center values of the two radar signals are in the same order of magnitude
- b
- The centers of the two radar signals are not in the same order of magnitude
- ③
- Elements in the signal PRI variation set are random sequences
3.2. Sorting Failure Principle Based on the Precise Design of Staggered Signals
3.2.1. SDIF Algorithm for Staggered Signal Analysis
| Algorithm 1 Staggered signal sorting via SDIF |
| Input: Multiple radar pulse sequences with close PRI parameters (all skeleton period T) |
| Initialization: Difference level C |
| 1: Perform first-level TOA difference histogram statistics on the input radar pulse sequence |
| 2: Judge whether there is more than one peak value in the histogram and they are similar in magnitude |
| 3: Extract the corresponding PRI at the peaks , , …, |
| 4: Determine whether the sum of , …, extracted in the third step is equal to the skeleton period. If the sum of , …, is equal to the skeleton period, it is a staggered radar signal; otherwise, multiple PRI fixed signals. |
3.2.2. Sorting Failure Principle
- ①
- The precise design equation for staggered signals is not applicable to two uneven signals
- ②
- The sub-staggered signal PRI increases
- ③
- The sub-staggered signal PRI decreases
4. Signal Simulation and Experiments
4.1. Failure Principle of SDIF Sorting Based on PRI Estimation
4.1.1. Signal Parameter Design
4.1.2. Signal Simulation Verification
- Case 1:
- The radar signal is a fixed PRI signal with .
- Case 2:
- The radar signal is a fixed PRI signal with .
- Case 3:
- The radar signal is repeated 100 times by a set of PRI slide signals. The initial value of the repeated frequency slip signal is 100 microseconds, the PRI increment is fixed at 30 microseconds, and the number of sub-pulses in the group is 10.
- Case 4:
- The radar signal is transmitted 50 times by two groups of PRI slide signals alternately. In the first group, the initial value of the PRI slide signal is 100 microseconds, the PRI increment is fixed at 30 microseconds, and the number of sub-pulses in the group is 10. The initial value of the second group is 1000 microseconds, the PRI increment is fixed at 100 microseconds, and the number of sub-pulses in the group is 10.
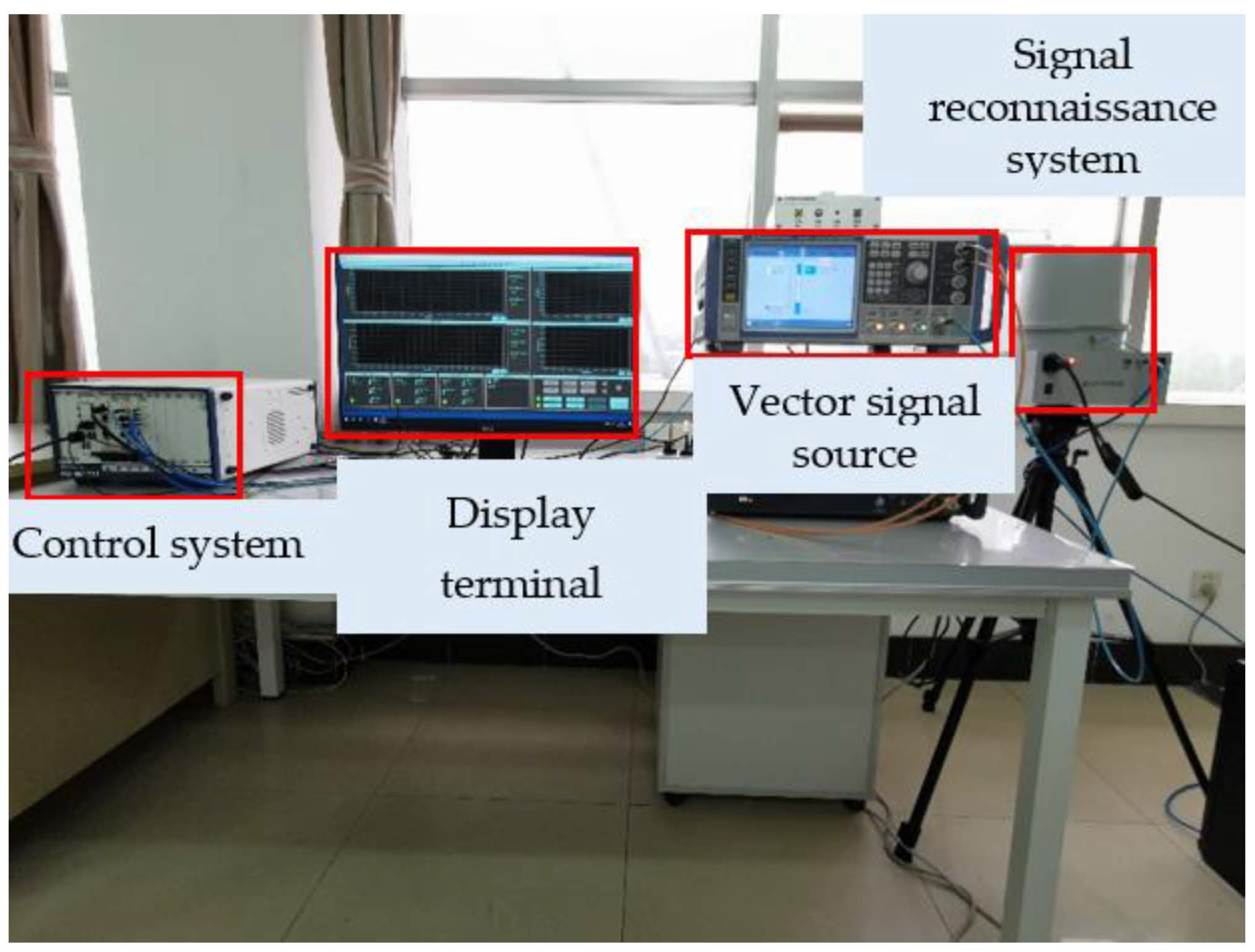
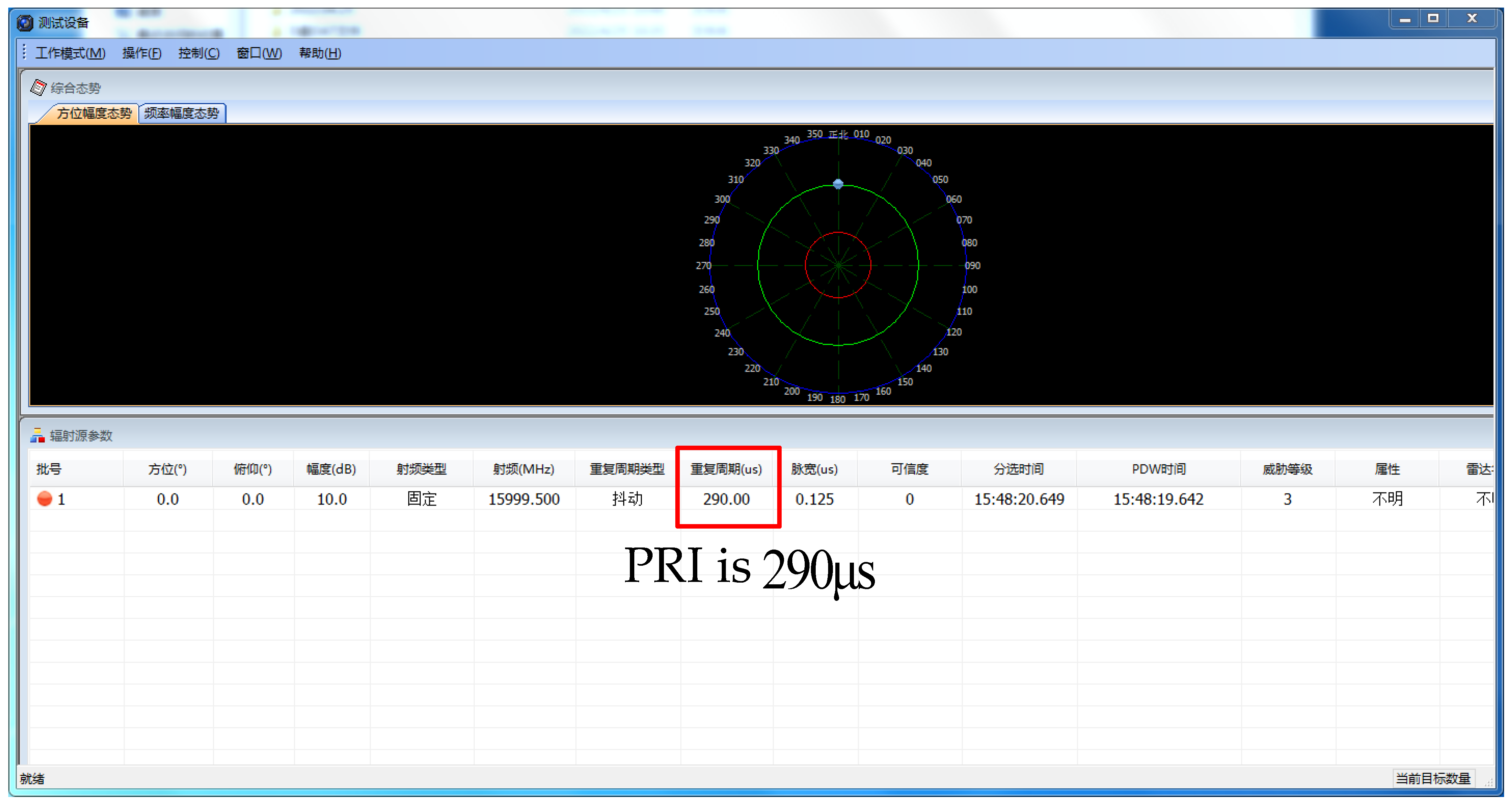
4.1.3. Signal Sorting Experiments
- ①
- Introduction of the signal sorting system
- ②
- Experimental process and results
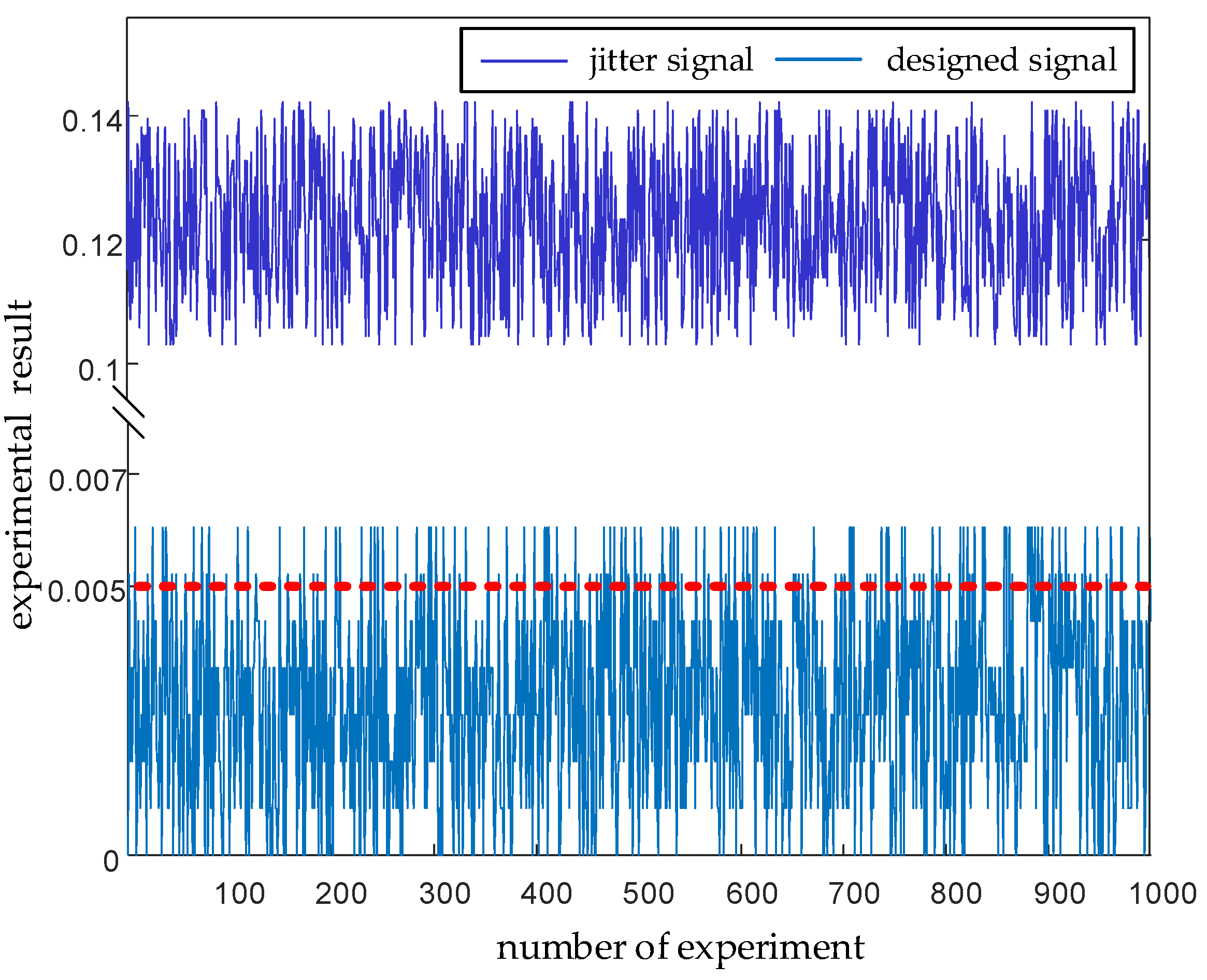
4.1.4. Comparison with PRI Jitter Signal Sorting Experiment
4.2. Sorting Failure Principle Based on the Precise Design of Staggered Signals
4.2.1. Staggered Signal Design
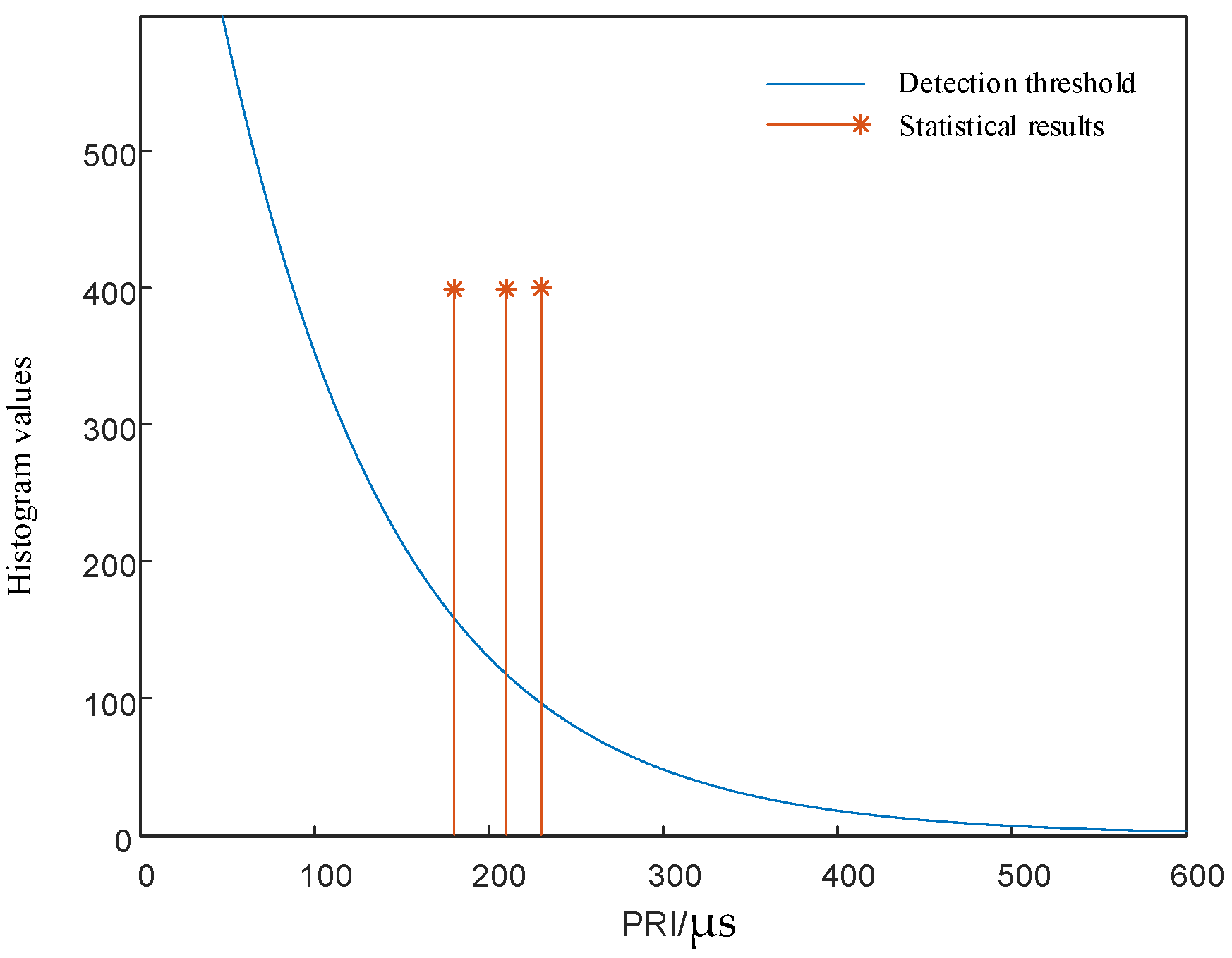
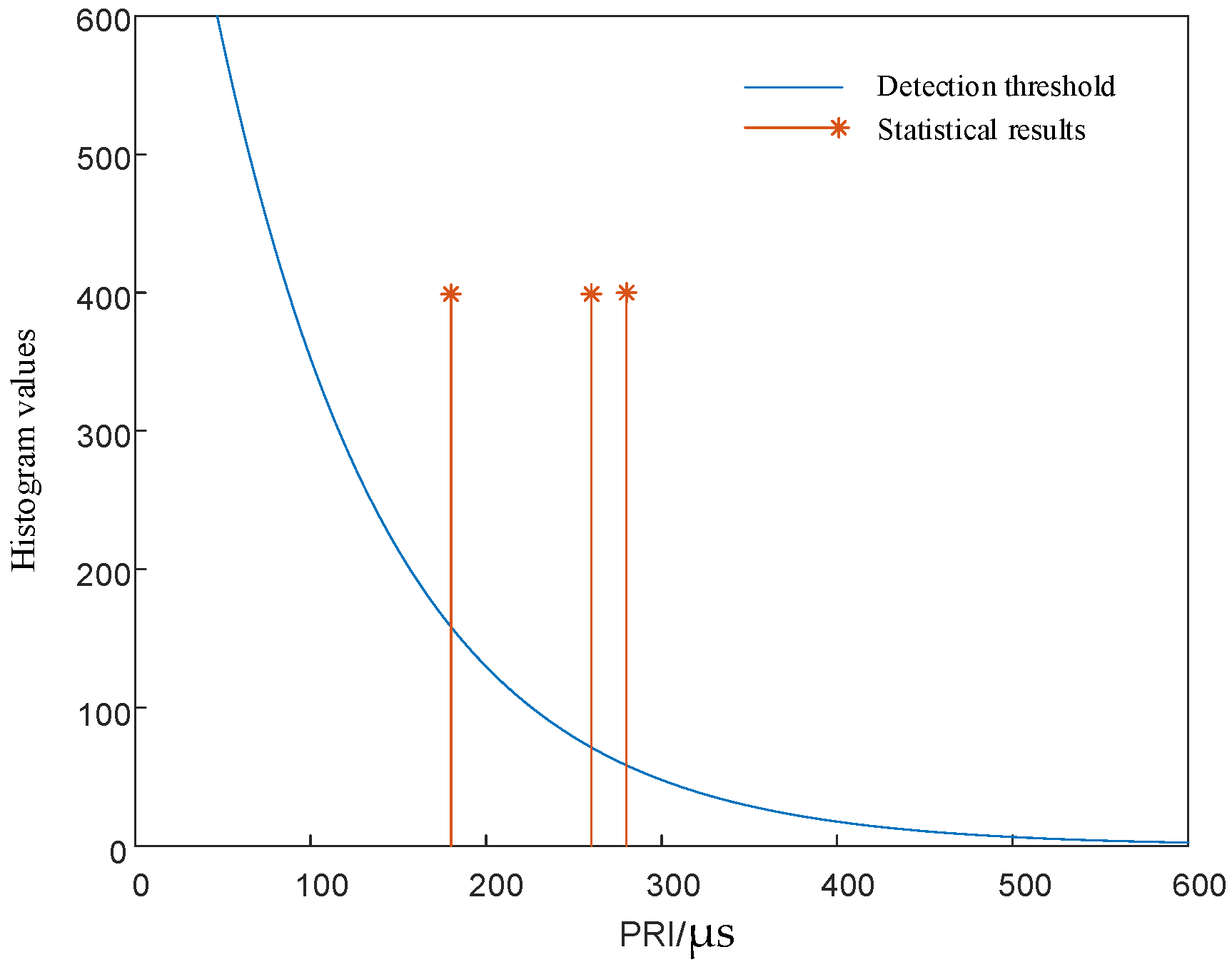
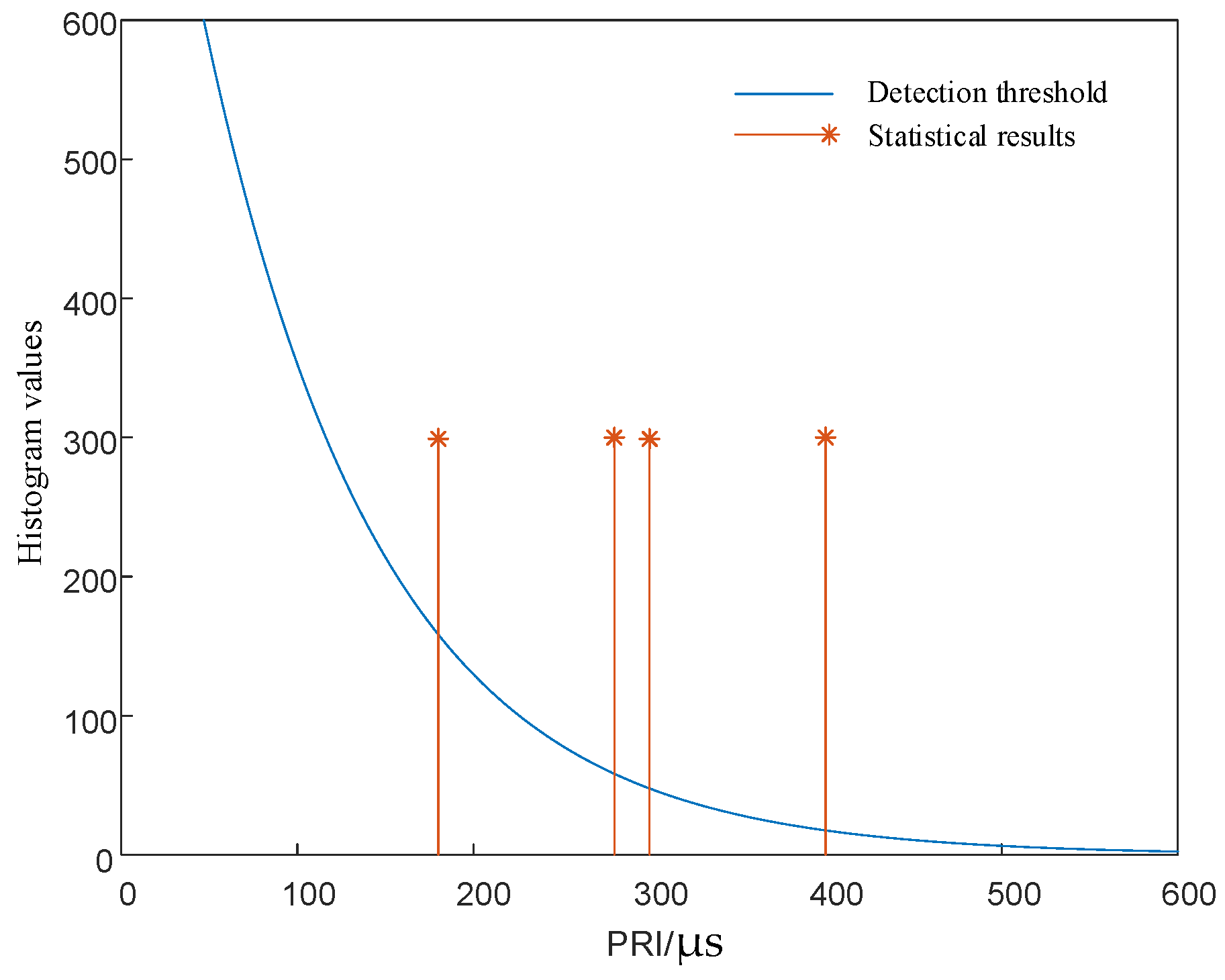
4.2.2. Simulation Verification
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Joint Chiefs of Staff. Joint Publication 3-85: Joint Electromagnetic Spectrum Operations; Joint Staff: Washington, DC, USA, 2020. [Google Scholar]
- Zhou, Y.Y.; An, W.; Guo, F.C. Principle of Electronic Countermeasures; Publishing House of Electronics Industry: Beijing, China, 2009; pp. 17–18. [Google Scholar]
- Xie, D.S.; Wang, F.; Chen, J. Extended T arget Echo Detection Based on KLD and Wigner Matrices. Sensors 2019, 19, 5385. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Shi, C.G.; Dong, J.; Zhou, J.J. Overview of aircraft radio frequency stealth technology. Syst. Eng. Electron. 2021, 43, 1452–1467. [Google Scholar]
- Zhao, X.T.; Zhou, J.J. Improved MUSIC algorithm for MIMO radar with low intercept. Syst. Eng. Electron. 2022, 44, 490–497. [Google Scholar]
- Sun, Y.B. Low probability of intercept waveform with rejection capability of spread spectrum parameter measurements. Telecommun. Eng. 2021, 61, 821–826. [Google Scholar]
- Chang, W. Design of synthetic aperture radar low-intercept radio frequency stealth. Syst. Eng. Electron. 2020, 31, 9. [Google Scholar] [CrossRef]
- Yang, Y.X.; Wang, D.X.; Huang, Q. Design Method of Radio Frequency Stealth Frequency Hopping Communications Based on Four-Dimensional Hyperchaotic System. J. Astronaut. 2020, 41, 1341–1349. [Google Scholar]
- Wang, Q.Z.; He, Z.Y.; Song, B.W.; Li, H. Overview on RF Stealth Technology Research. J. Electron. Inf. Technol. 2018, 40, 1505–1514. [Google Scholar]
- Jia, J.W.; Han, Z.Z.; Liu, L.M.; Xie, H.; Lv, M. Research on the SDIF Failure Principle for RF Stealth Radar Signal Design. Electronics 2022, 11, 1777. [Google Scholar] [CrossRef]
- Peng, G.; Yuan, X.; Liu, W. A Survey of Clustering and Sorting Algorithms for Radar Source Signals. Radar Sci. Technol. 2019, 17, 485–492. [Google Scholar]
- Liu, L.T.; Wang, L.L.; Chen, T. Non-parametric radar signal sorting algorithm based on improved Sets. Chin. J. Ship Res. 2021, 16, 232–238. [Google Scholar]
- Sui, J.P.; Liu, Z.; Liu, L. Progress in radar emitter signal deinterleaving. J. Radars 2022, 11, 418–433. [Google Scholar] [CrossRef]
- Jiang, Z.Y.; Sun, S.Y.; Li, H.W. A method for deinterleaving based on JANET. J. Univ. Chin. Acad. Sci. 2021, 38, 825–831. [Google Scholar]
- Yu, Q.; Bi, D.P.; Chen, L. Jamming Technology of Research Based on PRI Parameter Separation of Signal to ELINT System. Fire Control Command. Control 2016, 41, 143–147. [Google Scholar]
- Dai, S.B.; Lei, W.H.; Cheng, Y.Z. Electronic Anti-Reconnaissance Based on TOA Analysis. Electron. Inf. Warf. Technol. 2014, 29, 4. [Google Scholar]
- Wang, F.; Liu, J.F. LPS design of pulse repetition interval for formation radars. Inf. Technol. 2019, 6, 14–18+23. [Google Scholar]
- Zhang, B.Q.; Wang, W.S. Anti-Clustering Analysis of Anti-Reconnaissance Based on Full Pulse Information Extraction. Electron. Inf. Warf. Technol. 2017, 32, 7. [Google Scholar]
- Nan, H.; Peng, S.; Yu, J. Pulse interference method against PRI sorting. J. Eng. 2019, 2019, 5732–5735. [Google Scholar] [CrossRef]
- Sun, Z.Y.; Jiang, Q.X.; Bi, D.P. A technology for anti-reconnaissance based on factional quasi orthogonal waveform. Mod. Radar 2015, 37, 7. [Google Scholar]
- Mardia, H.K. New techniques for the deinterleaving of repetitive sequences. IEE Proc. F 1989, 136, 149–154. [Google Scholar] [CrossRef]
- Milojević, J.D.; Popović, B.M. Improved algorithm for the deinterleaving of radar pulses. IEE Proc. F (Radar Signal Process.) 1992, 139, 98–104. [Google Scholar]
- Li, T. Research on the Deinterleaving and Recognizing Algorithm for Radar Pulse Sequences with Complicated PRF Modulation; National University of Defense Technology: Changsha, China, 2006. [Google Scholar]
- Cao, J.F.; Chen, J.J.; Meng, X.L. A study on the technology of radar signal sorting. Radar ECM 2009, 20–22. [Google Scholar] [CrossRef]
- Yi, B.X.; Ling, W.S. Radar signal sorting technology in complex electromagnetic environment. Electron. Inf. Warf. Technol. 2014, 29, 57–59+68. [Google Scholar]
- Wang, W.Q. Moving-target tracking by cognitive RF stealth radar using frequency diverse array antenna. IEEE Trans. Geosci. Remote Sens. 2016, 54, 3764–3773. [Google Scholar] [CrossRef]
- Gong, J.; Lou, S.T.; Zhang, W.T. Method of array antenna DOA under strong interference presence. J. Xidian Univ. 2018, 45, 168–172. [Google Scholar]
- Ma, J.Z.; Shi, L.F.; Li, Y.Z.; Wang, X. Angle estimation of extended targets in main-lobe interference with polarization filtering. IEEE Trans. Aerosp. Electron. Syst. 2017, 53, 169–189. [Google Scholar] [CrossRef]
- Wang, H.J.; Su, H.C.; Zhang, J.; Cheng, Y. A PRI estimation method for high pulse missing rates. Aerosp. Electron. Warf. 2021, 37, 29–32+42. [Google Scholar]



























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| series number | 1 | 2 | 3 | 4 | 5 |
| 100 | 130 | 160 | 190 | 220 | |
| series number | 6 | 7 | 8 | 9 | 10 |
| 250 | 280 | 310 | 340 | 370 |
| First radar | series number | 1 | 2 | 3 | 4 | 5 |
| 100 | 130 | 160 | 190 | 220 | ||
| series number | 6 | 7 | 8 | 9 | 10 | |
| 250 | 280 | 310 | 340 | 370 | ||
| Second radar | series number | 1 | 2 | 3 | 4 | 5 |
| 1000 | 1100 | 1200 | 1300 | 1400 | ||
| series number | 6 | 7 | 8 | 9 | 10 | |
| 1500 | 1600 | 1700 | 1800 | 1900 |
| Simulation Case | |||||
|---|---|---|---|---|---|
| 1 | 80 | 100 | 130 | ||
| 2 | 80 | 100 | 180 | ||
| 3 | 80 | 100 | 180 | 220 | |
| 4 | 80 | 100 | 180 | 190 | 550 |
| 5 | 150 | 120 | 50 | ||
| 6 | 150 | 120 | 30 |
| PRI Incremental Imprecise Design | PRI Incremental Precise Design | |||||
|---|---|---|---|---|---|---|
| PRI Value | PRI1 | PRI2 | PRI3 | PRI1 | PRI2 | PRI3 |
| 80 | 100 | 130 | 80 | 100 | 180 | |
| Sorting result | PRI staggered signal, sub-PRIs are 80 μs, 100 μs, and 130 μs | Two PRI fixed signals with 180 μs and 360 μs | ||||
| SDIF result | success | failure | ||||
| PRI Decreasing Imprecise Design | PRI Decreasing Precise Design | |||||
|---|---|---|---|---|---|---|
| PRI value | PRI1 | PRI2 | PRI3 | PRI1 | PRI2 | PRI3 |
| 150 | 120 | 50 | 150 | 120 | 30 | |
| Sorting result | PRI staggered signal, sub-PRIs are 150 μs, 120 μs, and 50 μs | Two PRI fixed signals with 150 μs and 300 μs | ||||
| SDIF result | success | failure | ||||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jia, J.; Han, Z.; Liu, L.; Xie, H.; Lv, M. Research on the Sequential Difference Histogram Failure Principle Applied to the Signal Design of Radio Frequency Stealth Radar. Electronics 2022, 11, 2192. https://doi.org/10.3390/electronics11142192
Jia J, Han Z, Liu L, Xie H, Lv M. Research on the Sequential Difference Histogram Failure Principle Applied to the Signal Design of Radio Frequency Stealth Radar. Electronics. 2022; 11(14):2192. https://doi.org/10.3390/electronics11142192
Chicago/Turabian StyleJia, Jinwei, Zhuangzhi Han, Limin Liu, Hui Xie, and Meng Lv. 2022. "Research on the Sequential Difference Histogram Failure Principle Applied to the Signal Design of Radio Frequency Stealth Radar" Electronics 11, no. 14: 2192. https://doi.org/10.3390/electronics11142192
APA StyleJia, J., Han, Z., Liu, L., Xie, H., & Lv, M. (2022). Research on the Sequential Difference Histogram Failure Principle Applied to the Signal Design of Radio Frequency Stealth Radar. Electronics, 11(14), 2192. https://doi.org/10.3390/electronics11142192