






Flexible Fluidic-Type Strain Sensors for Wearable and Robotic Applications Fabricated with Novel Conductive Liquids: A Review

 , , ,
, , ,
Abstract
:1. Introduction
2. Conductive Liquids for Strain Sensing
2.1. Ionic Liquids


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sensing Liquid | Stretchable Substrate | Strain | Strain Speed/Frequency | Hysteresis | Gauge Factor | No. of Cycles | Optimization through Simulation | Ref. |
|---|---|---|---|---|---|---|---|---|
| Graphene/glycerin | Ecoflex | 1000% | 45.13 | 10,000 | No | [31] | ||
| Ethylene glycol/NaCl | Ecoflex | 250% | -- | 6.52% | <4 | 3000 | yes | [39] |
| Potassium iodide and glycerol solution (KI-Gly) | Silicone rubber EcoFlex 0030 | 5.3% | 2.2 | 1 Hz | No | [40] | ||
| Graphite/glycerol | Elastomer PDMS | 100% | electro-rheological testing module | [41] | ||||
| Gly-KCl (glycerol and potassium chloride) | Ecoflex | 100% | 5 Hz | 4.23% | 2.7 | 8000 | Yes | [45] |
| 1-Ethyl-3-methylimidazolium bis(trifluoromethylsulfonylmide) ([EMIM][TFSI]) ILs | Ecoflex | 400% | 7.9 | 1500 | No | [48] | ||
| Sodium chloride (NaCl) solution | Gold-sputtered electrodes | 64% | 21.34% of resistance | No | [49] | |||
| (1-Butyl-1-methylpyrrolidinium bis(trifluoromethylsulfonyl)imide | Silicone tube (DOW Corning Q7-4750) | 10% and higher | 2 and 2.5 | [50] | ||||
| rGO (reduced graphene oxide)/DI (deionized water) | Ecoflex | 400% | - | 31.6 | <10,000 for stretching, >15,000 cycles for pressuring | No | [51] | |
| Glycerin with aqueous sodium chloride | Elastomer | 40% | No | [57] | ||||
| Aqueous sodium chloride and glycerin | Silicone tube | 50% | 2.3 | [91] | ||||
| IL1: 1-butyl-3-methylimidazolium trifluoromethanesulfonate (red), IL2: 1-butyl-3-methylimidazolium dicyanamide (blue), and IL3: 1-ethyl-3-methylimidazolium dicyanamide (black) | PDMS | (0–15%) | <1.5% | 3000 | 720 | No | [92] | |
| 1-Butyl-3-methylimidazolium bis- (trifluoromethanesulfonyl)imide ([BMIM][Ntf2], Sigma-Aldrich) and 1-butyl-3-methylimidazolium acetate ([BMIM][Ac], Sigma-Aldrich) | PDMS elastomer | (Min < 50%) (max = 200%) | Average 3.9 mm/s | Negligible, average DH 2.41% | Min at 2, max at 40 | No | [94] | |
| 1-Decyl-3-methyl imidazolium chloride (DMIC) | Styrene-butadiene rubber (SBR) | 5% | 10 Hz | - | 30 | - | No | [95] |
| Ethylene glycol (EG) and ionic liquid (IL) | PDMS | 200 | 16.667 mm/s (highest) | 0 | 2.3 | No | [97] | |
| 1-Decyl-3-methyl imidazolium chloride (DMIC) | Styrene-butadiene rubber (SBR) | 7.5% | 100 | no | [96] |
2.2. Metal Liquids
2.3. Chemically Synthesized Liquid Solutions
2.4. Disadvantages and Advantages of Different Conductive Liquids
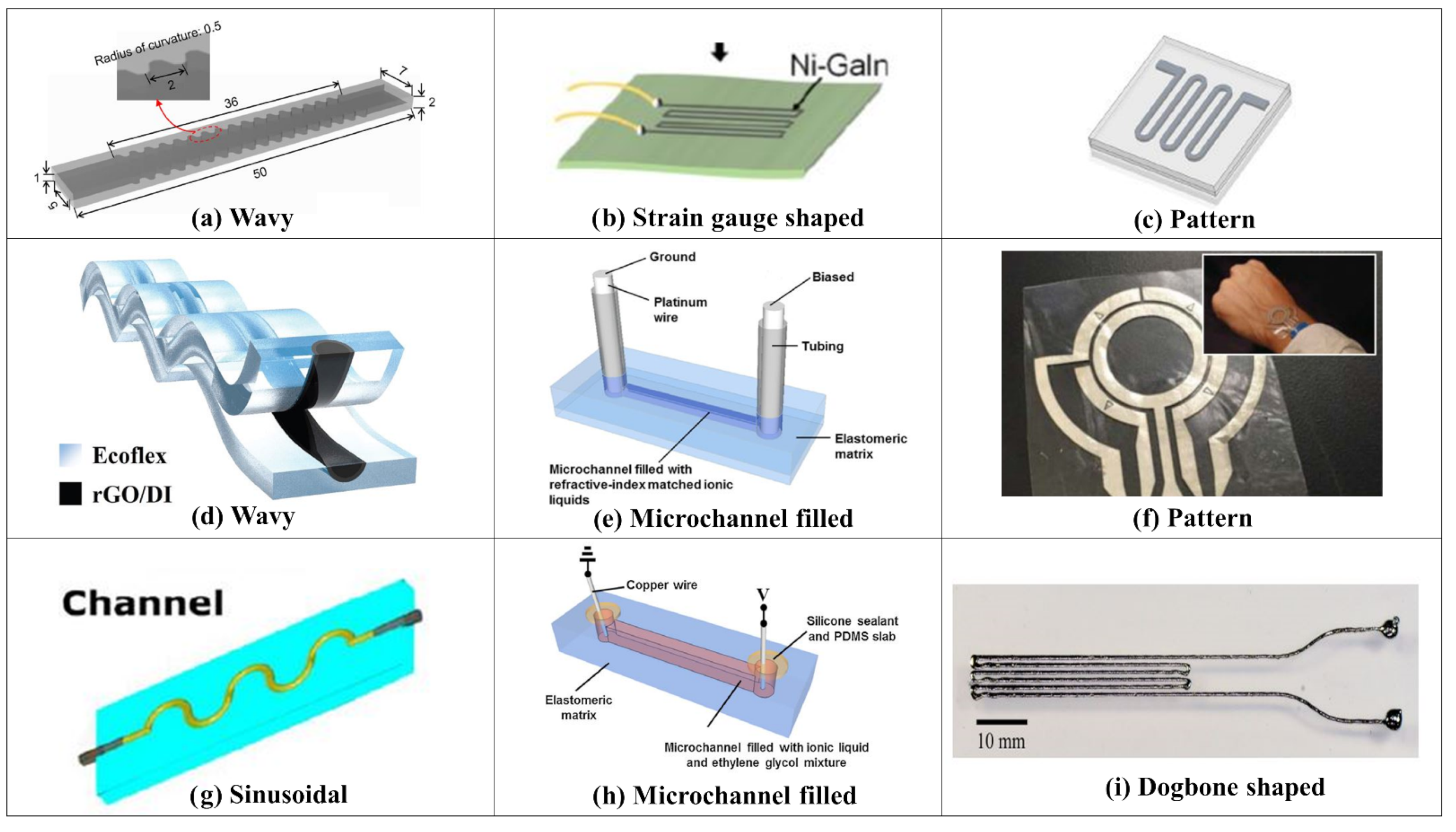
3. Channel Structures
4. Fabrication Techniques
5. Applications of Fluidic Type Strain Sensors
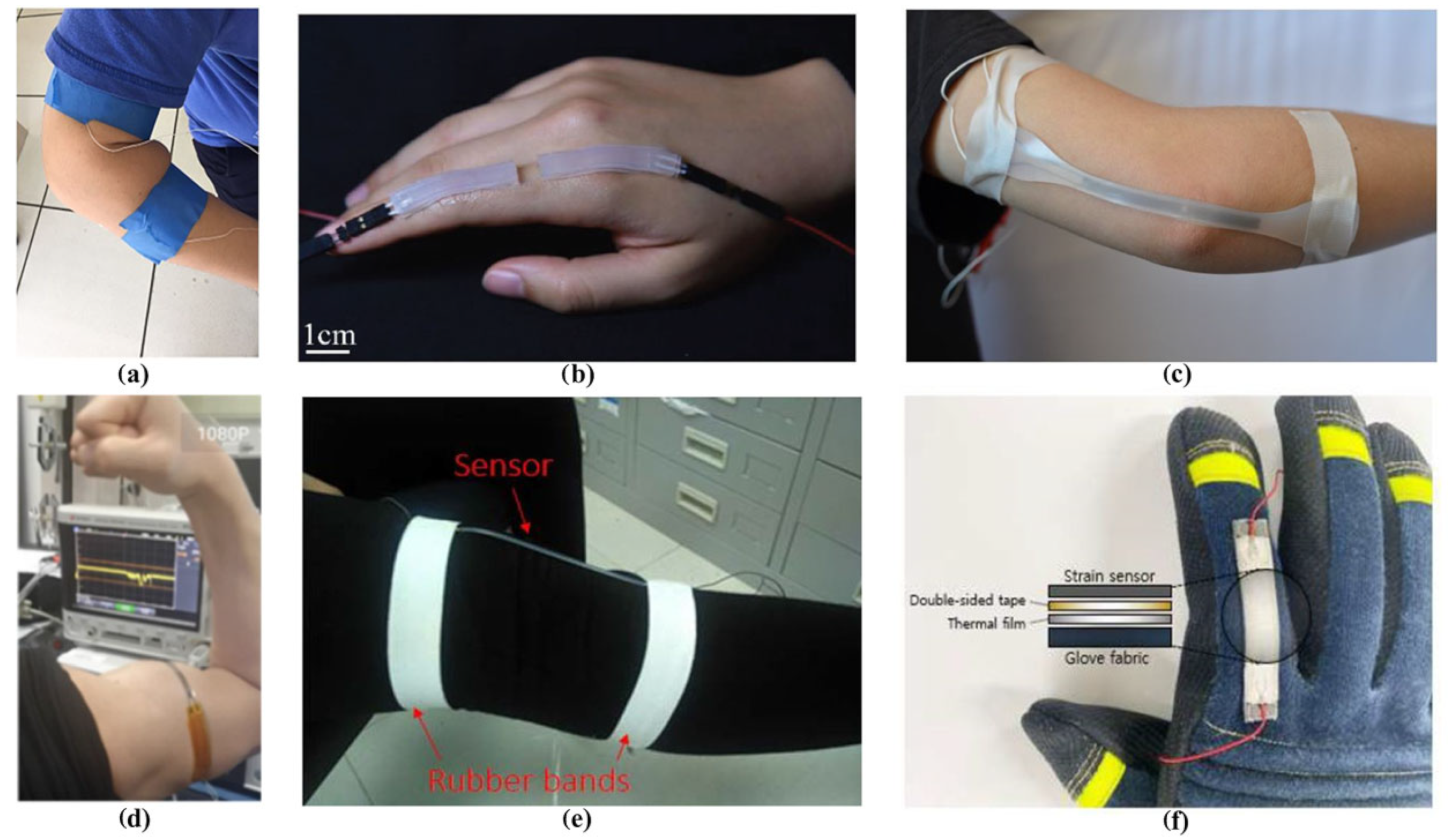
5.1. Wearable Devices
5.2. High-End Feedback for Soft Robotics Systems
6. Challenges and Future Trends
7. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Khanna, V.K. Flexible Electronics. Flex. Electron. 2019, 3, 1–417. [Google Scholar] [CrossRef]
- Qi, K.; He, J.; Wang, H.; Zhou, Y.; You, X.; Nan, N.; Shao, W.; Wang, L.; Ding, B.; Cui, S. A Highly Stretchable Nanofiber-Based Electronic Skin with Pressure-, Strain-, and Flexion-Sensitive Properties for Health and Motion Monitoring. ACS Appl. Mater. Interfaces 2017, 9, 42951–42960. [Google Scholar] [CrossRef] [PubMed]
- Cai, L.; Song, L.; Luan, P.; Zhang, Q.; Zhang, N.; Gao, Q.; Zhao, D.; Zhang, X.; Tu, M.; Yang, F.; et al. Super-stretchable, Transparent Carbon Nanotube-Based Capacitive Strain Sensors for Human Motion Detection. Sci. Rep. 2013, 3, 1–9. [Google Scholar] [CrossRef] [PubMed]
- Bae, G.Y.; Han, J.T.; Lee, G.; Lee, S.; Kim, S.W.; Park, S.; Kwon, J.; Jung, S.; Cho, K. Pressure/Temperature Sensing Bimodal Electronic Skin with Stimulus Discriminability and Linear Sensitivity. Adv. Mater. 2018, 30, 1–8. [Google Scholar] [CrossRef] [PubMed]
- Iglio, R.; Mariani, S.; Robbiano, V.; Strambini, L.; Barillaro, G. Flexible Polydimethylsiloxane Foams Decorated with Multiwalled Carbon Nanotubes Enable Unprecedented Detection of Ultralow Strain and Pressure Coupled with a Large Working Range. ACS Appl. Mater. Interfaces 2018, 10, 13877–13885. [Google Scholar] [CrossRef]
- Kim, S.J.; Mondal, S.; Min, B.K.; Choi, C.-G. Highly Sensitive and Flexible Strain–Pressure Sensors with Cracked Paddy-Shaped MoS2/Graphene Foam/Ecoflex Hybrid Nanostructures. ACS Appl. Mater. Interfaces 2018, 10, 36377–36384. [Google Scholar] [CrossRef]
- Thaheem, I.; Ali, S.; Waqas, M.; Hussain, A.; Soomro, A.M.; Bhutto, Z.; Shah, S.A.R.; Muhammad, W.; Shah, J. Electrochemical Performance of NiCo2O4 Spinel Cathodes for Intermediate Temperature Solid Oxide Fuel Cells. Phys. Status Solidi 2021, 219, 2100542. [Google Scholar] [CrossRef]
- Chethikkattuveli Salih, A.R.; Hyun, K.; Asif, A.; Farooqi, H.M.U.; Kim, Y.S.; Kim, K.H.; Lee, J.W.; Huh, D.; Choi, K.H. Extracellular Matrix Optimization for Enhanced Physiological Relevance in Hepatic Tissue-Chips. Polymers 2021, 13, 3016. [Google Scholar] [CrossRef]
- Soomro, A.M.; Jabbar, F.; Ali, M.; Lee, J.-W.; Mun, S.W.; Choi, K.H. All-range flexible and biocompatible humidity sensor based on poly lactic glycolic acid (PLGA) and its application in human breathing for wearable health monitoring. J. Mater. Sci. Mater. Electron. 2019, 30, 9455–9465. [Google Scholar] [CrossRef]
- Gao, W.; Ota, H.; Kiriya, D.; Takei, K.; Javey, A. Flexible Electronics toward Wearable Sensing. Acc. Chem. Res. 2019, 52, 523–533. [Google Scholar] [CrossRef]
- Borini, S.; White, R.; Wei, D.; Astley, M.; Haque, S.; Spigone, E.; Harris, N.; Kivioja, J.; Ryhänen, T. Ultrafast Graphene Oxide Humidity Sensors. ACS Nano 2013, 7, 11166–11173. [Google Scholar] [CrossRef] [PubMed]
- Pignanelli, J.; Schlingman, K.; Carmichael, T.B.; Rondeau-Gagné, S.; Ahamed, M.J. A comparative analysis of capacitive-based flexible PDMS pressure sensors. Sens. Actuators A Phys. 2018, 285, 427–436. [Google Scholar] [CrossRef]
- Xue, J.; Zhu, Z.; Xu, X.; Gu, Y.; Wang, S.; Xu, L.; Zou, Y.; Song, J.; Zeng, H.; Chen, Q. Narrowband Perovskite Photodetector-Based Image Array for Potential Application in Artificial Vision. Nano Lett. 2018, 18, 7628–7634. [Google Scholar] [CrossRef] [PubMed]
- Kim, H.B.; Sajid, M.; Kim, K.T.; Na, K.H.; Choi, K.H. Linear humidity sensor fabrication using bi-layered active region of transition metal carbide and polymer thin films. Sens. Actuators B Chem. 2017, 252, 725–734. [Google Scholar] [CrossRef]
- Varghese, O.K.; Kichambre, P.D.; Gong, D.; Ong, K.G.; Dickey, E.C.; Grimes, C.A. Gas sensing characteristics of multi-wall carbon nanotubes. Sens. Actuators B Chem. 2001, 81, 32–41. [Google Scholar] [CrossRef]
- Huang, J.-Q.; Zhang, Q.; Wei, F. Multi-functional separator/interlayer system for high-stable lithium-sulfur batteries: Progress and prospects. Energy Storage Mater. 2015, 1, 127–145. [Google Scholar] [CrossRef]
- Ali, S.; Waqas, M.; Jing, X.; Chen, N.; Chen, D.; Xiong, J.; He, W. Carbon–Tungsten Disulfide Composite Bilayer Separator for High-Performance Lithium–Sulfur Batteries. ACS Appl. Mater. Interfaces 2018, 10, 39417–39421. [Google Scholar] [CrossRef]
- Liang, Z.; Zhao, Y.; Li, Y. Electrospun Core-Shell Nanofiber as Separator for Lithium-Ion Batteries with High Performance and Improved Safety. Energies 2019, 12, 3391. [Google Scholar] [CrossRef]
- Zeeshan; Ahmed, R.; Chun, W.; Oh, S.J.; Kim, Y. Power Generation from a Hybrid Generator (TENG-EMG) Run by a Thermomagnetic Engine Harnessing Low Temperature Waste Heat. Energies 2019, 12, 1774. [Google Scholar] [CrossRef]
- Waqas, M.; Ali, S.; Chen, D.; Boateng, B.; Han, Y.; Zhang, M.; Han, J.; Goodenough, J.B.; He, W. A robust bi-layer separator with Lewis acid-base interaction for high-rate capacity lithium-ion batteries. Compos. Part B Eng. 2019, 177, 107448. [Google Scholar] [CrossRef]
- Neudeck, S.; Mazilkin, A.; Reitz, C.; Hartmann, P.; Janek, J.; Brezesinski, T. Effect of Low-Temperature Al2O3 ALD Coating on Ni-Rich Layered Oxide Composite Cathode on the Long-Term Cycling Performance of Lithium-Ion Batteries. Sci. Rep. 2019, 9, 1–11. [Google Scholar] [CrossRef]
- Corzo, D.; Tostado-Blázquez, G.; Baran, D. Flexible Electronics: Status, Challenges and Opportunities. Front. Electron. 2020, 1, 594003. [Google Scholar] [CrossRef]
- Khalid, M.A.U.; Kim, S.W.; Lee, J.; Soomro, A.M.; Rehman, M.M.; Lee, B.-G.; Choi, K.H. Resistive switching device based on SrTiO3/PVA hybrid composite thin film as active layer. Polymer 2020, 189, 122183. [Google Scholar] [CrossRef]
- Ali, M.; Khalid, M.A.U.; Kim, Y.S.; Soomro, A.M.; Hussain, S.; Doh, Y.H.; Choi, K.H. MWCNTs/PEDOT: PSS Composite as Guiding Layer on Screen-Printed Carbon Electrode for Linear Range Lactate Detection. J. Electrochem. Soc. 2021, 168, 037507. [Google Scholar] [CrossRef]
- Lee, J.-W.; Soomro, A.M.; Waqas, M.; Khalid, M.A.U.; Choi, K.H. A highly efficient surface modified separator fabricated with atmospheric atomic layer deposition for high temperature lithium ion batteries. Int. J. Energy Res. 2020, 44, 7035–7046. [Google Scholar] [CrossRef]
- Soomro, A.M.; Lee, J.-W.; Waqas, M.; Kim, Y.S.; Ali, M.; Khalid, M.A.U.; Choi, K.H. A Robust Surface-Modified Separator Fabricated with Roll-to-Roll Atomic Layer Deposition and Electrohydrodynamic Deposition Techniques for High Temperature Lithium Ion Batteries. J. Electrochem. Soc. 2020, 167, 160507. [Google Scholar] [CrossRef]
- Soomro, A.M.; Memon, F.H.; Lee, J.-W.; Ahmed, F.; Kim, K.H.; Kim, Y.S.; Choi, K.H. Fully 3D printed multi-material soft bio-inspired frog for underwater synchronous swimming. Int. J. Mech. Sci. 2021, 210, 106725. [Google Scholar] [CrossRef]
- Ali, M.; Kim, Y.S.; Khalid, M.A.U.; Soomro, A.M.; Lee, J.-W.; Lim, J.-H.; Choi, K.H.; Ho, L.S. On-chip real-time detection and quantification of reactive oxygen species in MCF-7 cells through an in-house built fluorescence microscope. Microelectron. Eng. 2020, 233, 111432. [Google Scholar] [CrossRef]
- Zhao, Y.; Huang, Y.; Hu, W.; Guo, X.; Wang, Y.; Liu, P.; Liu, C.; Zhang, Y. Highly sensitive flexible strain sensor based on threadlike spandex substrate coating with conductive nanocomposites for wearable electronic skin. Smart Mater. Struct. 2018, 28, 035004. [Google Scholar] [CrossRef]
- Herrmann, J.; Müller, K.-H.; Reda, T.; Baxter, G.R.; Raguse, B.; De Groot, G.J.J.B.; Chai, R.; Roberts, M.E.; Wieczorek, L. Nanoparticle films as sensitive strain gauges. Appl. Phys. Lett. 2007, 91, 183105. [Google Scholar] [CrossRef]
- Qi, Z.; Bian, H.; Yang, Y.; Nie, N.; Wang, F. Graphene/Glycerin Solution-Based Multifunctional Stretchable Strain Sensor with Ultra-High Stretchability, Stability, and Sensitivity. Nanomaterials 2019, 9, 617. [Google Scholar] [CrossRef] [PubMed]
- Aziz, S.; Chang, S.-H. Smart-fabric sensor composed of single-walled carbon nanotubes containing binary polymer composites for health monitoring. Compos. Sci. Technol. 2018, 163, 1–9. [Google Scholar] [CrossRef]
- Wan, J.; Wang, Q.; Zang, S.; Huang, X.; Wang, T.; Liu, G.; Li, C.; Ren, X. Highly stretchable and sensitive liquid-type strain sensor based on a porous elastic rope/elastomer matrix composite structure. Compos. Sci. Technol. 2019, 182, 107707. [Google Scholar] [CrossRef]
- Wu, G.; Wu, X.; Xu, Y.; Cheng, H.; Meng, J.; Yu, Q.; Shi, X.; Zhang, K.; Chen, W.; Chen, S. High-Performance Hierarchical Black-Phosphorous-Based Soft Electrochemical Actuators in Bioinspired Applications. Adv. Mater. 2019, 31, 1806492. [Google Scholar] [CrossRef]
- Costa, J.C.; Spina, F.; Lugoda, P.; Garcia-Garcia, L.; Roggen, D.; Munzenrieder, N. Flexible Sensors—From Materials to Applications. Technologies 2019, 7, 35. [Google Scholar] [CrossRef]
- Khalid, M.A.U.; Ali, M.; Soomro, A.M.; Kim, S.W.; Kim, H.B.; Lee, B.-G.; Choi, K.H. A highly sensitive biodegradable pressure sensor based on nanofibrous dielectric. Sensors Actuators A Phys. 2019, 294, 140–147. [Google Scholar] [CrossRef]
- Bhattacharjee, M.; Soni, M.; Escobedo, P.; Dahiya, R. PEDOT:PSS Microchannel-Based Highly Sensitive Stretchable Strain Sensor. Adv. Electron. Mater. 2020, 6, 2000445. [Google Scholar] [CrossRef]
- Kagenda, C.; Lee, J.W.; Memon, F.H.; Ahmed, F.; Samantasinghar, A.; Akhtar, M.W.; Khalique, A.; Choi, K.H. Silicone Elastomer Composites Fabricated with MgO and MgO-Multi-Wall Carbon Nanotubes with Improved Thermal Conductivity. Nanomaterials 2021, 11, 3418. [Google Scholar] [CrossRef]
- Choi, D.Y.; Kim, M.H.; Oh, Y.S.; Jung, S.-H.; Jung, J.H.; Sung, H.J.; Lee, H.W.; Lee, H.M. Highly Stretchable, Hysteresis-Free Ionic Liquid-Based Strain Sensor for Precise Human Motion Monitoring. ACS Appl. Mater. Interfaces 2017, 9, 1770–1780. [Google Scholar] [CrossRef]
- Xu, S.; Vogt, D.M.; Hsu, W.-H.; Osborne, J.; Walsh, T.; Foster, J.R.; Sullivan, S.K.; Smith, V.C.; Rousing, A.W.; Goldfield, E.C.; et al. Biocompatible Soft Fluidic Strain and Force Sensors for Wearable Devices. Adv. Funct. Mater. 2018, 29, 1807058. [Google Scholar] [CrossRef]
- Zhou, T.; Guo, B.; Xu, J. Highly Filled Glycerol/Graphite Suspensions as Fluidic Soft Sensors and Their Responsive Mechanism to Shear. Adv. Mater. Technol. 2020, 5, 2000508. [Google Scholar] [CrossRef]
- Yang, G.; Pang, G.; Pang, Z.; Gu, Y.; Mantysalo, M.; Yang, H. Non-Invasive Flexible and Stretchable Wearable Sensors with Nano-Based Enhancement for Chronic Disease Care. IEEE Rev. Biomed. Eng. 2019, 12, 34–71. [Google Scholar] [CrossRef] [PubMed]
- Wang, P.; Hu, M.; Wang, H.; Chen, Z.; Feng, Y.; Wang, J.; Ling, W.; Huang, Y. The Evolution of Flexible Electronics: From Nature, Beyond Nature, and To Nature. Adv. Sci. 2020, 7, 2001116. [Google Scholar] [CrossRef]
- Jabbar, F.; Soomro, A.M.; Lee, J.-W.; Ali, M.; Kim, Y.S.; Lee, S.-H.; Choi, K.H. Robust Fluidic Biocompatible Strain Sensor Based on PEDOT:PSS/CNT Composite for Human-wearable and High-end Robotic Applications. Sensors Mater. 2020, 32, 4077. [Google Scholar] [CrossRef]
- Soomro, A.M.; Khalid, M.A.U.; Shah, I.; Kim, S.W.; Kim, Y.S.; Choi, K.H. Highly stable soft strain sensor based on Gly-KCl filled sinusoidal fluidic channel for wearable and water-proof robotic applications. Smart Mater. Struct. 2019, 29, 025011. [Google Scholar] [CrossRef]
- Asif, A.; Park, S.H.; Soomro, A.M.; Khalid, M.A.U.; Salih, A.R.C.; Kang, B.; Ahmed, F.; Kim, K.H.; Choi, K.H. Microphysiological system with continuous analysis of albumin for hepatotoxicity modeling and drug screening. J. Ind. Eng. Chem. 2021, 98, 318–326. [Google Scholar] [CrossRef]
- Bringans, R.D.; Veres, J. Challenges and Opportunities in Flexible Electronics. In Proceedings of the 2016 IEEE International Electron Devices Meeting (IEDM), San Francisco, CA, USA, 3–7 December 2016; Volume 6.4.1–6.4.2. [Google Scholar] [CrossRef]
- Zhang, S.-H.; Wang, F.-X.; Li, J.-J.; Peng, H.-D.; Yan, J.-H.; Pan, G.-B. Wearable Wide-Range Strain Sensors Based on Ionic Liquids and Monitoring of Human Activities. Sensors 2017, 17, 2621. [Google Scholar] [CrossRef] [PubMed]
- Russo, S.; Ranzani, T.; Liu, H.; Nefti-Meziani, S.; Althoefer, K.; Menciassi, A. Soft and Stretchable Sensor Using Biocompatible Electrodes and Liquid for Medical Applications. Soft Robot. 2015, 2, 146–154. [Google Scholar] [CrossRef]
- Keulemans, G.; Pelgrims, P.; Bakula, M.; Ceyssens, F.; Puers, R. An Ionic Liquid Based Strain Sensor for Large Displacements. Procedia Eng. 2014, 87, 1123–1126. [Google Scholar] [CrossRef] [Green Version]
- Xu, M.; Qi, J.; Li, F.; Zhang, Y. Highly stretchable strain sensors with reduced graphene oxide sensing liquids for wearable electronics. Nanoscale 2018, 10, 5264–5271. [Google Scholar] [CrossRef]
- Dickey, M.D. Stretchable and Soft Electronics using Liquid Metals. Adv. Mater. 2017, 29, 1606425. [Google Scholar] [CrossRef] [PubMed]
- Yao, G.; Yin, C.; Wang, Q.; Zhang, T.; Chen, S.; Lu, C.; Zhao, K.; Xu, W.; Pan, T.; Gao, M.; et al. Flexible bioelectronics for physiological signals sensing and disease treatment. J. Materiomics 2020, 6, 397–413. [Google Scholar] [CrossRef]
- Ali, A.; Hantanasirisakul, K.; Abdala, A.; Urbankowski, P.; Zhao, M.-Q.; Anasori, B.; Gogotsi, Y.; Aïssa, B.; Mahmoud, K.A. Effect of Synthesis on Performance of MXene/Iron Oxide Anode Material for Lithium-Ion Batteries. Langmuir 2018, 34, 11325–11334. [Google Scholar] [CrossRef] [PubMed]
- Ota, H.; Chen, K.; Lin, Y.; Kiriya, D.; Shiraki, H.; Yu, Z.; Ha, T.-J.; Javey, A. Highly deformable liquid-state heterojunction sensors. Nat. Commun. 2014, 5, 5032. [Google Scholar] [CrossRef] [PubMed]
- Agaoglu, S.; Diep, P.; Martini, M.; Kt, S.; Baday, M.; Araci, I.E. Ultra-sensitive microfluidic wearable strain sensor for intraocular pressure monitoring. Lab Chip 2018, 18, 3471–3483. [Google Scholar] [CrossRef]
- Cheung, Y.-N.; Zhu, Y.; Cheng, C.-H.; Chao, C.; Leung, W.W.-F. A novel fluidic strain sensor for large strain measurement. Sens. Actuators A Phys. 2008, 147, 401–408. [Google Scholar] [CrossRef]
- He, R.; Liu, H.; Niu, Y.; Zhang, H.; Genin, G.M.; Xu, F. Flexible Miniaturized Sensor Technologies for Long-Term Physiological Monitoring. NPJ Flex. Electron. 2022, 6, 1–11. [Google Scholar] [CrossRef]
- Ashraf, H.; Shah, B.; Soomro, A.M.; Safdar, Q.-U.; Halim, Z.; Shah, S.K. Ambient-noise Free Generation of Clean Underwater Ship Engine Audios from Hydrophones using Generative Adversarial Networks. Comput. Electr. Eng. 2022, 100, 107970. [Google Scholar] [CrossRef]
- Khan, H.; Soomro, A.M.; Samad, A.; Ullah, I.; Waqas, M.; Ashraf, H.; Khan, S.A.; Choi, K.H. Highly sensitive mechano-optical strain sensors based on 2D materials for human wearable monitoring and high-end robotic applications. J. Mater. Chem. C 2022, 10, 932–940. [Google Scholar] [CrossRef]
- Ahmed, F.; Waqas, M.; Shaikh, B.; Khan, U.; Soomro, A.M.; Kumar, S.; Ashraf, H.; Memon, F.H.; Choi, K.H. Multi-material Bio-inspired Soft Octopus Robot for Underwater Synchronous Swimming. J. Bionic Eng. 2022, 19, 1229–1241. [Google Scholar] [CrossRef]
- Ahmed, F.; Waqas, M.; Javed, B.; Soomro, A.M.; Kumar, S.; Ashraf, H.; Khan, U.; Kim, K.H.; Choi, K.H. Decade of bio-inspired soft robots: A review. Smart Mater. Struct. 2022, 31, 073002. [Google Scholar] [CrossRef]
- Khalid, M.A.U.; Kim, K.H.; Salih, A.R.C.; Hyun, K.; Park, S.H.; Kang, B.; Soomro, A.M.; Ali, M.; Jun, Y.; Huh, D.; et al. High performance inkjet printed embedded electrochemical sensors for monitoring hypoxia in a gut bilayer microfluidic chip. Lab Chip 2022, 22, 1764–1778. [Google Scholar] [CrossRef]
- Geim, A.K. Graphene: Status and Prospects. Science 2009, 324, 1530–1534. [Google Scholar] [CrossRef]
- Anonymous. Potassium Iodide Oral: Uses, Side Effects, Interactions, Pictures, Warnings & Dosing—WebMD. Available online: https://www.webmd.com/drugs/2/drug-1823/potassium-iodide-oral/details (accessed on 27 July 2022).
- Feldman, S.R. Sodium Chloride. In Kirk-Othmer Encyclopedia of Chemical Technology; John Wiley & Sons: Hoboken, NJ, USA, 2005; Available online: https://doi.org/10.1002/0471238961.1915040902051820.a01.pub2 (accessed on 8 June 2022).
- Dickey, M.; Chiechi, R.; Larsen, R.J.; Weiss, E.A.; Weitz, D.A.; Whitesides, G.M. Eutectic Gallium-Indium (EGaIn): A Liquid Metal Alloy for the Formation of Stable Structures in Microchannels at Room Temperature**. Adv. Funct. Mater. 2008, 18, 1097–1104. [Google Scholar] [CrossRef]
- Kaufman, S.; Whalen, T. The surface tension of liquid gold, liquid tin, and liquid gold-tin binary solutions. Acta Met. 1965, 13, 797–805. [Google Scholar] [CrossRef]
- Liu, H.; Shi, X.; Xu, F.; Zhang, L.; Zhang, W.; Chen, L.; Li, Q.; Uher, C.; Day, T.; Snyder, J. Copper ion liquid-like thermoelectrics. Nat. Mater. 2012, 11, 422–425. [Google Scholar] [CrossRef] [PubMed]
- Johnson, K.E. What’s an Ionic Liquid? Electrochem. Soc. Interface 2007, 16, 38–41. [Google Scholar] [CrossRef]
- Espinet, P.; Esteruelas, M.; Oro, L.; Serrano, J.; Sola, E. Transition metal liquid crystals: Advanced materials within the reach of the coordination chemist. Coord. Chem. Rev. 1992, 117, 215–274. [Google Scholar] [CrossRef]
- Wu, Y.; Zhou, Y.; Asghar, W.; Liu, Y.; Li, F.; Sun, D.; Hu, C.; Wu, Z.; Shang, J.; Yu, Z.; et al. Liquid Metal-Based Strain Sensor with Ultralow Detection Limit for Human–Machine Interface Applications. Adv. Intell. Syst. 2021, 3, 2000235. [Google Scholar] [CrossRef]
- Yan, H.-L.; Chen, Y.-Q.; Deng, Y.; Zhang, L.-L.; Hong, X.; Lau, W.-M.; Mei, J.; Hui, D.; Yan, H.; Liu, Y. Coaxial printing method for directly writing stretchable cable as strain sensor. Appl. Phys. Lett. 2016, 109, 083502. [Google Scholar] [CrossRef]
- Ryu, C.; Park, J.; Jung, S.I.; Jang, I.R.; Kim, H.J. Measurement of Pulsating Flow Using a Self-Attachable Flexible Strain Sensor Based on Adhesive PDMS and CNT. Chemosensors 2022, 10, 187. [Google Scholar] [CrossRef]
- Arabagi, V.; Felfoul, O.; Gosline, A.H.; Wood, R.J.; Dupont, P.E. Biocompatible Pressure Sensing Skins for Minimally Invasive Surgical Instruments. IEEE Sens. J. 2016, 16, 1294–1303. [Google Scholar] [CrossRef] [PubMed]
- Chong, H.; Lou, J.; Bogie, K.M.; Zorman, C.A.; Majerus, S.J.A. Vascular Pressure–Flow Measurement Using CB-PDMS Flexible Strain Sensor. IEEE Trans. Biomed. Circuits Syst. 2019, 13, 1451–1461. [Google Scholar] [CrossRef] [PubMed]
- Chen, J.; Zhang, J.; Luo, Z.; Zhang, J.; Li, L.; Su, Y.; Gao, X.; Li, Y.; Tang, W.; Cao, C.; et al. Superelastic, Sensitive, and Low Hysteresis Flexible Strain Sensor Based on Wave-Patterned Liquid Metal for Human Activity Monitoring. ACS Appl. Mater. Interfaces 2020, 12, 22200–22211. [Google Scholar] [CrossRef] [PubMed]
- Lei, Z.; Chen, B.; Koo, Y.-M.; MacFarlane, D.R. Introduction: Ionic Liquids. Chem. Rev. 2017, 117, 6633–6635. [Google Scholar] [CrossRef]
- Shah, F.U.; An, R.; Muhammad, N. Editorial: Properties and Applications of Ionic Liquids in Energy and Environmental Science. Front. Chem. 2020, 8, 1190. [Google Scholar] [CrossRef]
- Giernoth, R. Task-Specific Ionic Liquids. Angew. Chem. Int. Ed. 2010, 49, 2834–2839. [Google Scholar] [CrossRef]
- Visser, A.E.; Holbrey, J.D.; Rogers, R.D. Hydrophobic ionic liquids incorporating N-alkylisoquinolinium cations and their utilization in liquid–liquid separations. Chem. Commun. 2001, 1, 2484–2485. [Google Scholar] [CrossRef]
- Dzyuba, S.V.; Bartsch, R.A. New room-temperature ionic liquids with C2-symmetrical imidazolium cations. Chem. Commun. 2001, 1, 1466–1467. [Google Scholar] [CrossRef]
- Holbrey, J.D.; Seddon, K.R. The phase behaviour of 1-alkyl-3-methylimidazolium tetrafluoroborates; ionic liquids and ionic liquid crystals. J. Chem. Soc., Dalton Trans. 1999, 13, 2133–2140. [Google Scholar] [CrossRef]
- Chun, S.; Dzyuba, S.V.; Bartsch, R.A. Influence of Structural Variation in Room-Temperature Ionic Liquids on the Selectivity and Efficiency of Competitive Alkali Metal Salt Extraction by a Crown Ether. Anal. Chem. 2001, 73, 3737–3741. [Google Scholar] [CrossRef] [PubMed]
- Althuluth, M.; Overbeek, J.P.; van Wees, H.J.; Zubeir, L.; Haije, W.G.; Berrouk, A.; Peters, C.J.; Kroon, M.C. Natural gas purification using supported ionic liquid membrane. J. Membr. Sci. 2015, 484, 80–86. [Google Scholar] [CrossRef]
- Neves, L.A.; Crespo, J.; Coelhoso, I. Gas permeation studies in supported ionic liquid membranes. J. Membr. Sci. 2010, 357, 160–170. [Google Scholar] [CrossRef]
- Hernández-Fernández, F.J.; de los Rios, A.P.; Tomás-Alonso, F.; Palacios, J.M.; Villora, G. Preparation of supported ionic liquid membranes: Influence of the ionic liquid immobilization method on their operational stability. J. Membr. Sci. 2009, 341, 172–177. [Google Scholar] [CrossRef]
- Davis, J.J.H. Task-Specific Ionic Liquids. Chem. Lett. 2004, 33, 1072–1077. [Google Scholar] [CrossRef]
- Lee, S.-G. Functionalized imidazolium salts for task-specific ionic liquids and their applications. Chem. Commun. 2006, 10, 1049–1063. [Google Scholar] [CrossRef]
- Cui, J.; Zhu, W.; Gao, N.; Li, J.; Yang, H.; Jiang, Y.; Seidel, P.; Ravoo, B.J.; Li, G. Inverse Opal Spheres Based on Polyionic Liquids as Functional Microspheres with Tunable Optical Properties and Molecular Recognition Capabilities. Angew. Chem. Int. Ed. 2014, 53, 3844–3848. [Google Scholar] [CrossRef]
- Asif, A.; Kim, K.H.; Jabbar, F.; Sejoong, K.; Choi, K.H. Real-time sensors for live monitoring of disease and drug analysis in microfluidic model of proximal tubule. Microfluid. Nanofluid 2020, 24, 1–10. [Google Scholar] [CrossRef]
- Yepes, L.R.; Demir, E.; Lee, J.Y.; Sun, R.; Smuck, M.; Araci, I.E. Skin Mountable Capillaric Strain Sensor with Ultrahigh Sensitivity and Direction Specificity. Adv. Mater. Technol. 2020, 5, 2000631. [Google Scholar] [CrossRef]
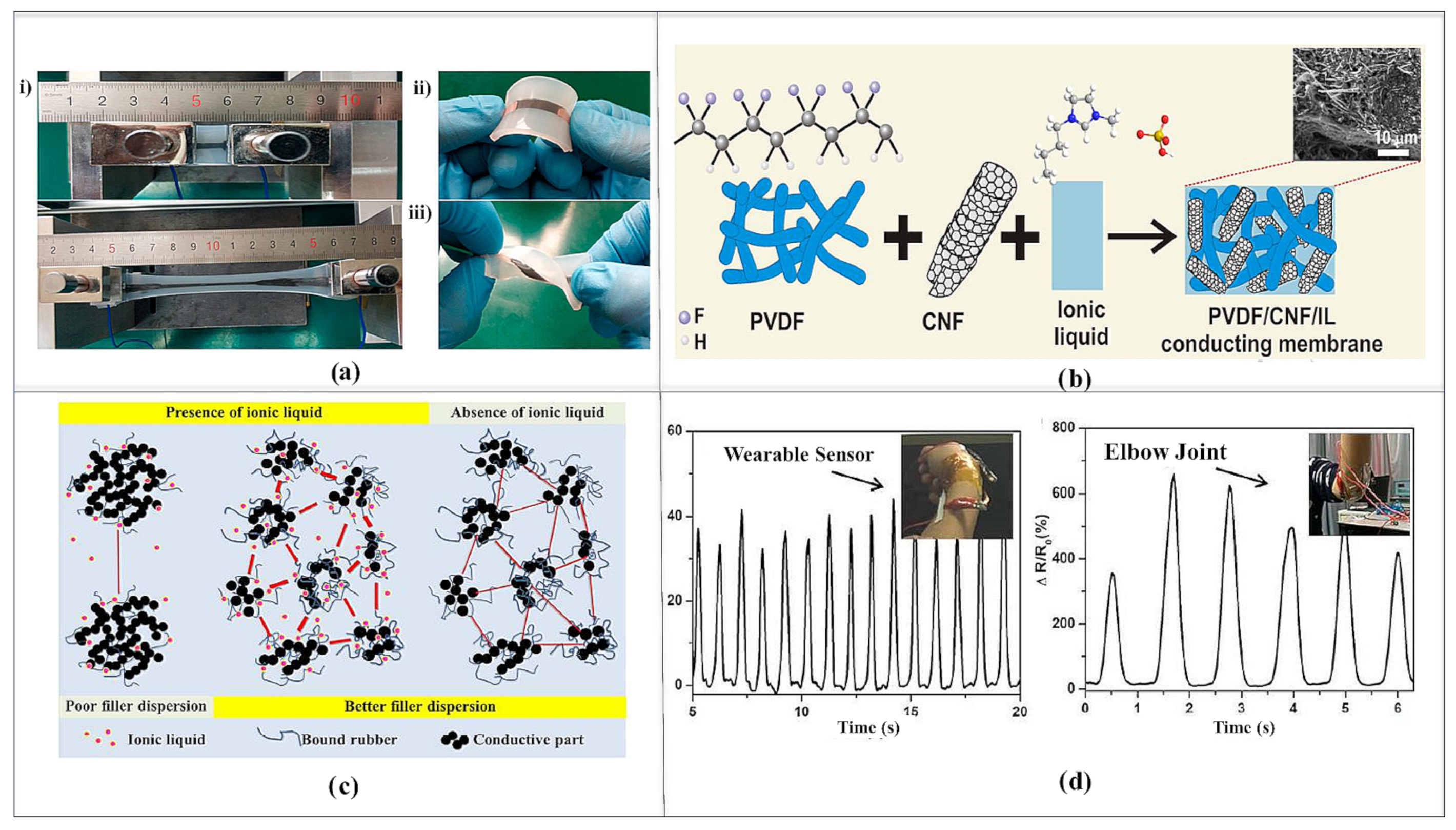
- Prasad, B.; Gill, F.S.; Panwar, V.; Anoop, G. Development of strain sensor using conductive poly(vinylidene fluoride) (PVDF) nanocomposite membrane reinforced with ionic liquid (IL) & carbon nanofiber (CNF). Compos. Part B Eng. 2019, 173, 106990. [Google Scholar] [CrossRef]
- Yoon, S.G.; Koo, H.-J.; Chang, S.T. Highly Stretchable and Transparent Microfluidic Strain Sensors for Monitoring Human Body Motions. ACS Appl. Mater. Interfaces 2015, 7, 27562–27570. [Google Scholar] [CrossRef] [PubMed]
- Narongthong, J.; Wießner, S.; Hait, S.; Sirisinha, C.; Stöckelhuber, K.W. Strain-rate independent small-strain-sensor: Enhanced responsiveness of carbon black filled conductive rubber composites at slow deformation by using an ionic liquid. Compos. Sci. Technol. 2020, 188, 107972. [Google Scholar] [CrossRef]
- Narongthong, J.; Das, A.; Le, H.H.; Wießner, S.; Sirisinha, C. An efficient highly flexible strain sensor: Enhanced electrical conductivity, piezoresistivity and flexibility of a strongly piezoresistive composite based on conductive carbon black and an ionic liquid. Compos. Part A Appl. Sci. Manuf. 2018, 113, 330–338. [Google Scholar] [CrossRef]
- Yoon, S.G.; Park, B.J.; Chang, S.T. Highly sensitive microfluidic strain sensors with low hysteresis using a binary mixture of ionic liquid and ethylene glycol. Sens. Actuators A Phys. 2017, 254, 1–8. [Google Scholar] [CrossRef]
- Huang, H.-J.; Ning, X.; Zhou, M.-B.; Sun, T.; Wu, X.; Zhang, X.-P. A Three-Dimensional Printable Liquid Metal-Like Ag Nanoparticle Ink for Making a Super-Stretchable and Highly Cyclic Durable Strain Sensor. ACS Appl. Mater. Interfaces 2021, 13, 18021–18032. [Google Scholar] [CrossRef] [PubMed]
- Wang, X.; Guo, R.; Yuan, B.; Yao, Y.; Wang, F.; Liu, J. Ni-doped Liquid Metal Printed Highly Stretchable and Conformable Strain Sensor for Multifunctional Human-Motion Monitoring. In Proceedings of the IEEE 2018 40th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Honolulu, HI, USA, 18–21 July 2018; pp. 3276–3279. [Google Scholar] [CrossRef]
- Gao, Q.; Li, H.; Zhang, J.; Xie, Z.; Zhang, J.; Wang, L. Microchannel Structural Design for a Room-Temperature Liquid Metal Based Super-stretchable Sensor. Sci. Rep. 2019, 9, 1–8. [Google Scholar] [CrossRef]
- Lu, T.; Wissman, J.; Ruthika; Majidi, C. Soft Anisotropic Conductors as Electric Vias for Ga-Based Liquid Metal Circuits. ACS Appl. Mater. Interfaces 2015, 7, 26923–26929. [Google Scholar] [CrossRef]
- Cheng, S.; Wu, Z. A Microfluidic, Reversibly Stretchable, Large-Area Wireless Strain Sensor. Adv. Funct. Mater. 2011, 21, 2282–2290. [Google Scholar] [CrossRef]
- Sahlberg, A.; Nilsson, F.; Berglund, A.; Nguyen, H.; Hjort, K.; Jeong, S.H. High-Resolution Liquid Alloy Patterning for Small Stretchable Strain Sensor Arrays. Adv. Mater. Technol. 2018, 3, 1700330. [Google Scholar] [CrossRef]
- Votzke, C.; Daalkhaijav, U.; Mengue, Y.; Johnston, M.L. Highly-Stretchable Biomechanical Strain Sensor using Printed Liquid Metal Paste. In Proceedings of the 2018 IEEE Biomedical Circuits and Systems Conference (BioCAS), Cleveland, OH, USA, 17–19 October 2018; pp. 1–4. [Google Scholar] [CrossRef]
- Hu, T.; Xuan, S.; Ding, L.; Gong, X. Liquid metal circuit based magnetoresistive strain sensor with discriminating magnetic and mechanical sensitivity. Sensors Actuators B Chem. 2020, 314, 128095. [Google Scholar] [CrossRef]
- Wu, Y.-H.; Zhen, R.-M.; Liu, H.-Z.; Liu, S.-Q.; Deng, Z.-F.; Wang, P.-P.; Chen, S.; Liu, L. Liquid metal fiber composed of a tubular channel as a high-performance strain sensor. J. Mater. Chem. C 2017, 5, 12483–12491. [Google Scholar] [CrossRef]
- Otake, S.; Konishi, S. Integration of Flexible Strain Sensor Using Liquid Metal into Soft Micro-Actuator. In Proceedings of the 2018 IEEE Micro Electro Mechanical Systems (MEMS), Belfast, UK, 26 April 2018; pp. 571–574. [Google Scholar] [CrossRef]
- Liu, J.; Lei, B.; Jiang, W.; Han, J.; Zhang, H.; Liu, H. A novel intrinsically strain sensor for large strain detection. Sens. Actuators A Phys. 2021, 332, 113081. [Google Scholar] [CrossRef]
- Yang, Y.; Wang, H.; Hou, Y.; Nan, S.; Di, Y.; Dai, Y.; Li, F.; Zhang, J. MWCNTs/PDMS composite enabled printed flexible omnidirectional strain sensors for wearable electronics. Compos. Sci. Technol. 2022, 226, 109518. [Google Scholar] [CrossRef]
- Ko, Y.; Kim, J.-S.; Vu, C.; Kim, J. Ultrasensitive Strain Sensor Based on Pre-Generated Crack Networks Using Ag Nanoparticles/Single-Walled Carbon Nanotube (SWCNT) Hybrid Fillers and a Polyester Woven Elastic Band. Sensors 2021, 21, 2531. [Google Scholar] [CrossRef]
- Wang, P.; Wei, W.; Li, Z.; Duan, W.; Han, H.; Xie, Q. A superhydrophobic fluorinated PDMS composite as a wearable strain sensor with excellent mechanical robustness and liquid impalement resistance. J. Mater. Chem. A 2020, 8, 3509–3516. [Google Scholar] [CrossRef]
- Rajabasadi, F.; Schwarz, L.; Medina-Sánchez, M.; Schmidt, O.G. 3D and 4D lithography of untethered microrobots. Prog. Mater. Sci. 2021, 120, 100808. [Google Scholar] [CrossRef]
- Soter, G.; Garrad, M.; Conn, A.T.; Hauser, H.; Rossiter, J. Skinflow: A Soft Robotic Skin Based on Fluidic Transmission. In Proceedings of the 2019 2nd IEEE International Conference on Soft Robotics (RoboSoft), Seoul, Korea, 14–18 April 2019; pp. 355–360. [Google Scholar] [CrossRef]
- Chossat, J.-B.; Park, Y.-L.; Wood, R.J.; Duchaine, V. A Soft Strain Sensor Based on Ionic and Metal Liquids. IEEE Sensors J. 2013, 13, 3405–3414. [Google Scholar] [CrossRef]
- Niu, B. Design, Fabrication and Characterization of Flexible, Wearable and Highly Durable Strain Sensors Assisted by Bioin-Spired Polydopamine. [Online]. 2021. Available online: https://theses.lib.polyu.edu.hk/handle/200/11150 (accessed on 8 September 2022).
- Khalid, M.A.U.; Chang, S.H. Flexible strain sensors for wearable applications fabricated using novel functional nanocomposites: A review. Compos. Struct. 2022, 284, 115214. [Google Scholar] [CrossRef]









| Sensing Liquid | Stretchable Substrate | Strain | Strain Speed/Frequency | Hysteresis | Gauge Factor | No. of Cycles | Optimization through Simulation | Ref. |
|---|---|---|---|---|---|---|---|---|
| Galinstan (Ga67, 3In19, 2Sn13.5) | PDMS | 105% | 58 ms | 0.07 | 2.33 | 8000 | no | [72] |
| Eutectic gallium–indium | PDMS | 160% | 3.2 | no | [73] | |||
| Liquid metal eutectic gallium indium (EGaIn) | Ecoflex 00-30 | 320% | 116 ms | 1.02 | 4.91 | 500 | no | [77] |
| Liquid metal-like Ag NP ink | PDMS | 800% | 0.5 Hz | 6.5 at 100% strain, 9.3 800% strain | 5000 | yes | [98] | |
| Ni-doped liquid metal (Ni-GaI | Ecoflex 0030 Ecoflex 0030-ZnS | 10, 50, 100% | 200 | no | [99] | |||
| Eutectic gallium-indium (EGaln) | Ecoflex | 550% | 4.95 | Yes | [100] | |||
| EGaln ferromagnetic Ag−Ni microparticles. | Polydimethylsiloxane (PDMS) | 60% | 0.077 | No | [101] | |||
| Two layers of liquid-metal-alloy-filled microfluidic channels | Silicone elastomer | 15% | 1.5 GHz | 0 | no | [102] | ||
| A gallium-based eutectic alloy | Ecoflex 00-30, Smooth-On | 350% | 50 | no | [103] | |||
| Eutectic alloy of gallium, indium, and tin (62.5% Ga, 21.5% In, 16% Sn) sonicated at 0.4 kJ/g with 2 wt % nickel nanoparticles | Smooth-On Ecoflex 30 | 200 | 0 | 375 | no | [104] | ||
| Gallium, indium, and tin | PDMS | 13–25% and 25–40% | 3500 | no | [105] | |||
| Gallium–indium–tin eutectic | PDMS | 0.3% | 300 mm/s | 0.11 | 2.2 | 3500 | no | [106] |
| ---- | PDMS | 0.8 | no | [107] | ||||
| EGaIn | Ecoflex 00-30 | 178% | 120 ms | 1.14% | 3.04 | 100 | no | [108] |
| Sensing Liquid | Stretchable Substrate | Strain | Strain Speed/Frequency | Hysteresis | Gauge Factor | No. of Cycles | Optimization through Simulation | Ref. |
|---|---|---|---|---|---|---|---|---|
| Liquid polymer PEDOT:PSS | Polydimethylsiloxane (PDMS) | 30% | 0.1, 0.25, and 0.75 mm/s | <9% | 12,000 | Yes (Labview controlled strain generation setup) | [37] | |
| Poly(3,4-ethylenedioxythiophene) polystyrene sulfonate multiwall carbon nanotube (PEDOT:PSS/MWCNT) | Ecoflex | 150% | 10 | 1.56% | 89.4 | 1000 | No | [44] |
| DI EG30 EG45 EG55 | PDMS | 1% | 200 | No | [74] | |||
| Blood mimicking fluid (BMF) | CB-PDMS (carbon black—polydimethylsiloxane) | 50% | 5 | 35 | No | [76] | ||
| MWCNTs and KH570 with ethanol | PDMS | 100% | 1.55 | 4000 | Yes | [109] | ||
| Single-walled carbon nanotube (SWCNT) ink | Polyester woven elastic band (PEB) | 1.5–5% | 0.1–1 Hz | Pre-cracked (20) | up to 3550 | 5000 | no | [110] |
| Carbon nanotubes (MWCNT) | PDMS | 200% | 1000 | no | [111] |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Soomro, A.M.; Jawed, B.; Soomro, J.B.; Ahmed Ansari, J.; Ahmed, F.; Waqas, M.; Ashraf, H.; Almani, S. Flexible Fluidic-Type Strain Sensors for Wearable and Robotic Applications Fabricated with Novel Conductive Liquids: A Review. Electronics 2022, 11, 2903. https://doi.org/10.3390/electronics11182903
Soomro AM, Jawed B, Soomro JB, Ahmed Ansari J, Ahmed F, Waqas M, Ashraf H, Almani S. Flexible Fluidic-Type Strain Sensors for Wearable and Robotic Applications Fabricated with Novel Conductive Liquids: A Review. Electronics. 2022; 11(18):2903. https://doi.org/10.3390/electronics11182903
Chicago/Turabian StyleSoomro, Afaque Manzoor, Bushra Jawed, Jahangeer Badar Soomro, Jamshed Ahmed Ansari, Faheem Ahmed, Muhammad Waqas, Hina Ashraf, and Suhail Almani. 2022. "Flexible Fluidic-Type Strain Sensors for Wearable and Robotic Applications Fabricated with Novel Conductive Liquids: A Review" Electronics 11, no. 18: 2903. https://doi.org/10.3390/electronics11182903
APA StyleSoomro, A. M., Jawed, B., Soomro, J. B., Ahmed Ansari, J., Ahmed, F., Waqas, M., Ashraf, H., & Almani, S. (2022). Flexible Fluidic-Type Strain Sensors for Wearable and Robotic Applications Fabricated with Novel Conductive Liquids: A Review. Electronics, 11(18), 2903. https://doi.org/10.3390/electronics11182903