
Recognition System of Human Fatigue State Based on Hip Gait Information in Gait Patterns


Abstract
:1. Introduction
2. Materials and Methods
2.1. Three-Level Load Test
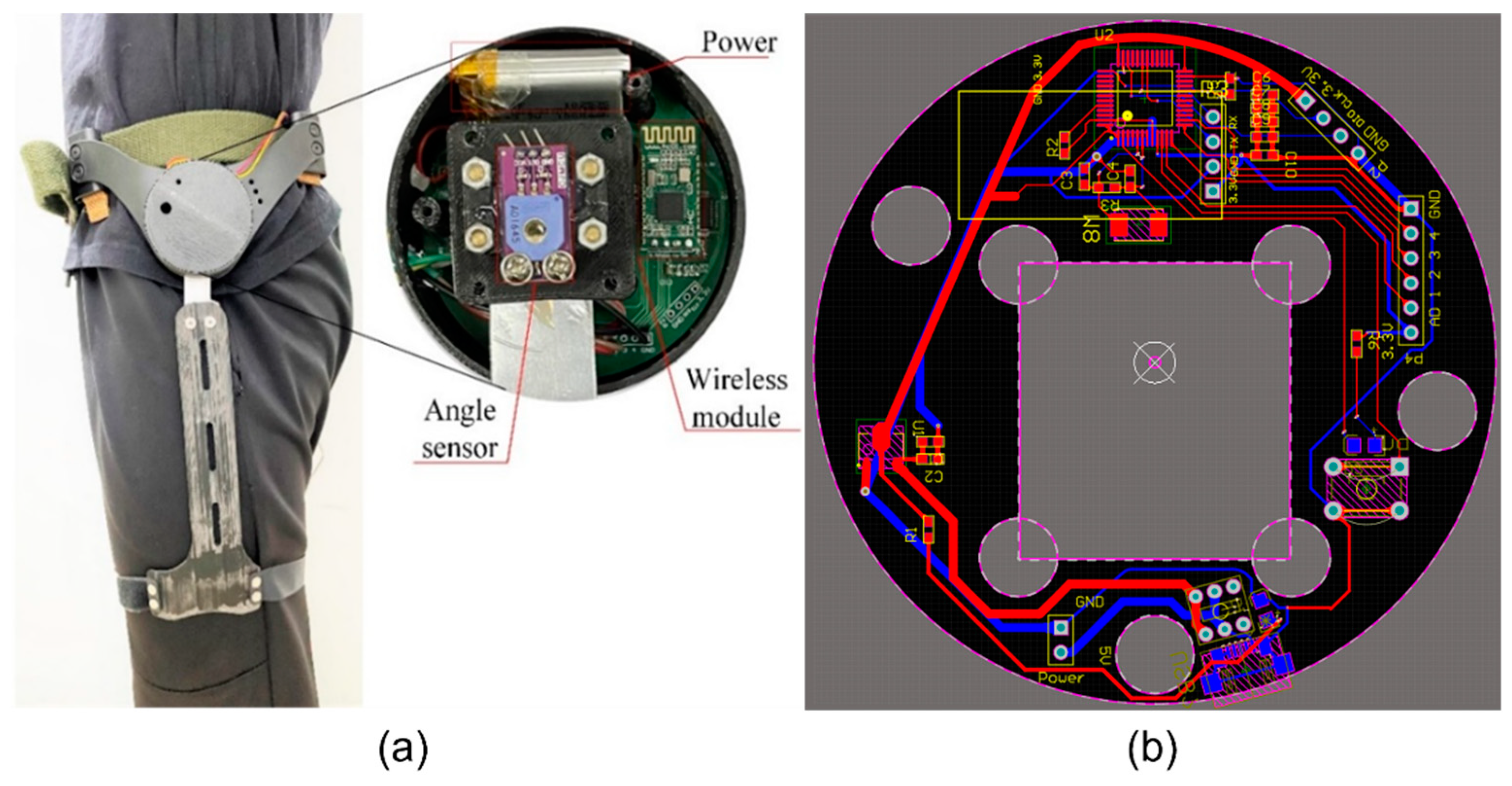
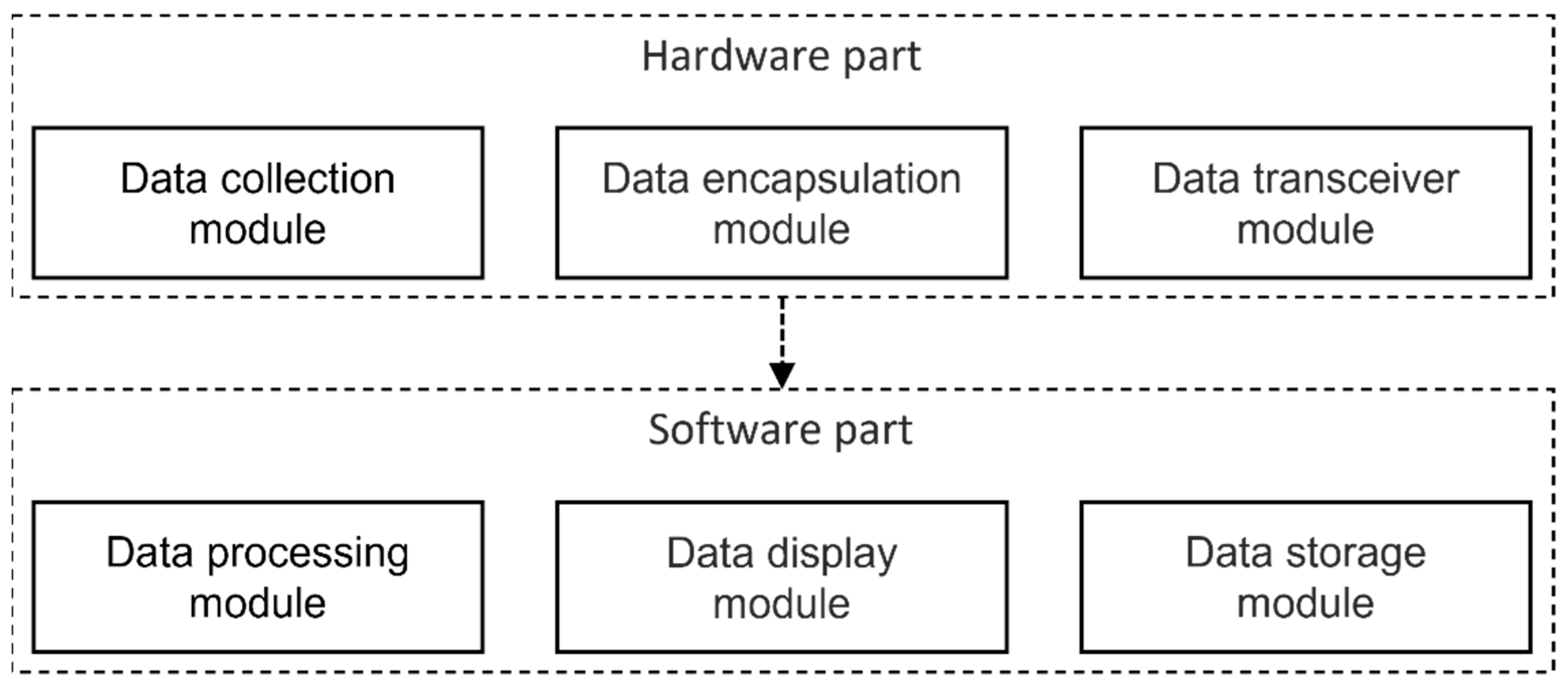
2.2. Gait Information Collection Device
2.3. Experimental Program
2.4. Fatigue Inducement
2.5. Data Collection
2.6. Data Segmentation
2.7. Machine Learning Algorithm
2.8. Performance Assessment
3. Results and Discussion
3.1. Analysis of the Gait Sequence Data
3.2. Statistical Analysis of the Gait Sequence Data
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Pedisic, Z.; Shrestha, N.; Kovalchik, S.; Stamatakis, E.; Liangruenrom, N.; Grgic, J.; Titze, S.; Biddle, S.J.; Bauman, A.E.; Oja, P. Is running associated with a lower risk of all-cause, cardiovascular and cancer mortality, and is the more the better? A systematic review and meta-analysis. Br. J. Sports Med. 2019, 54, 898–905. [Google Scholar] [CrossRef] [PubMed]
- Oja, P.; Titze, S.; Kokko, S.; Kujala, U.M.; Heinonen, A.; Kelly, P.; Koski, P.; Foster, C. Health benefits of different sport disciplines for adults: Systematic review of observational and intervention studies with meta-analysis. Br. J. Sport. Med. 2015, 49, 434–440. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Van Gent, R.N.; Siem, D.; van Middelkoop, M.; Van Os, A.G.; Bierma-Zeinstra, S.M.A.; Koes, B.W. Incidence and determinants of lower extremity running injuries in long distance runners: A systematic review. Br. J. Sport. Med. 2007, 41, 469–480. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Derrick, T.R.; Dereu, D.; McLean, S.P. Impacts and kinematic adjustments during an exhaustive run. Med. Sci. Sports Exerc. 2002, 34, 998–1002. [Google Scholar] [CrossRef]
- Mizrahi, J.; Verbitsky, O.; Isakov, E.; Daily, D. Effect of fatigue on leg kinematics and impact acceleration in long distance running. Hum. Mov. Sci. 2000, 19, 139–151. [Google Scholar] [CrossRef]
- Clansey, A.C.; Hanlon, M.; Wallace, E.S.; Lake, M.J. Effects of Fatigue on Running Mechanics Associated with Tibial Stress Fracture Risk. Med. Sci. Sports Exerc. 2012, 44, 1917–1923. [Google Scholar] [CrossRef]
- Winter, S.; Gordon, S.; Watt, K. Effects of fatigue on kinematics and kinetics during overground running: A systematic review. J. Sports Med. Phys. Fit. 2017, 57, 887–899. [Google Scholar] [CrossRef]
- Donelan, J.M.; Naing, V.; Li, Q. Biomechanical energy harvesting. In Proceedings of the 2009 IEEE Radio and Wireless Symposium, San Diego, CA, USA, 18–22 January 2009; IEEE: Piscataway, NJ, USA, 2009. [Google Scholar]
- Szeidl, C.A. Consumption Commitments and Risk Preferences. Q. J. Econ. 2007, 122, 831–877. [Google Scholar]
- Koblbauer, I.F.; van Schooten, K.S.; Verhagen, E.A.; van Dieen, J.H. Kinematic changes during running-induced fatigue and relations with core endurance in novice runners. J. Sci. Med. Sport 2014, 17, 419–424. [Google Scholar] [CrossRef]
- Gerlach, K.E.; White, S.C.; Burton, H.W.; Dorn, J.M.; Leddy, J.J.; Horvath, P.J. Kinetic changes with fatigue and relationship to injury in female runners. Med. Sci. Sports Exerc. 2005, 37, 657–663. [Google Scholar] [CrossRef]
- Hussain, S.; Xie, S.Q.; Jamwal, P.K. Robust nonlinear control of an intrinsically compliant robotic gait training orthosis. IEEE Trans. Syst. Man Cybern. Syst. 2013, 43, 655–665. [Google Scholar] [CrossRef]
- Hussain, S.; Xie, S.Q.; Jamwal, P.K. Adaptive impedance control of a robotic orthosis for gait rehabilitation. IEEE Trans. Cybern. 2013, 43, 1025–1034. [Google Scholar] [CrossRef] [PubMed]
- Borg, G. Perceived exertion as an indicator of somatic stress. Scand. J. Rehabil. Med. 1970, 2, 92–98. [Google Scholar] [PubMed]
- Baghdadi, A.; Megahed, F.M.; Esfahani, E.T.; Cavuoto, L.A. A machine learning approach to detect changes in gait parameters following a fatiguing occupational task. Ergonomics 2018, 61, 1116–1129. [Google Scholar] [CrossRef]
- Janssen, D.; Schollhorn, W.I.; Newell, K.M.; Jager, J.M.; Rost, F.; Vehof, K. Diagnosing fatigue in gait patterns by support vector machines and self-organizing maps. Hum. Mov. Sci. 2011, 30, 966–975. [Google Scholar] [CrossRef]
- Zhang, J.; Lockhart, T.E.; Soangra, R. Classifying Lower Extremity Muscle Fatigue During Walking Using Machine Learning and Inertial Sensors. Ann. Biomed. Eng. 2014, 42, 600–612. [Google Scholar] [CrossRef] [Green Version]
- Hajifar, S.; Sun, H.Y.; Megahed, F.M.; Jones-Farmer, L.A.; Rashedi, E.; Cavuoto, L.A. A forecasting framework for predicting perceived fatigue: Using time series methods to forecast ratings of perceived exertion with features from wearable sensors. Appl. Ergon. 2021, 90, 103262. [Google Scholar] [CrossRef]
- Noehren, B.; Sanchez, Z.; Cunningham, T.; McKeon, P.O. The effect of pain on hip and knee kinematics during running in females with chronic patellofemoral pain. Gait Posture 2012, 36, 596–599. [Google Scholar] [CrossRef]
- Bazett-Jones, D.M.; Cobb, S.C.; Huddleston, W.E.; O’Connor, K.M.; Armstrong, B.S.R.; Earl-Boehm, J.E. Effect of Patellofemoral Pain on Strength and Mechanics after an Exhaustive Run. Med. Sci. Sports Exerc. 2013, 45, 1331–1339. [Google Scholar] [CrossRef]
- Dierks, T.A.; Manal, K.T.; Hamill, J.; Davis, I. Lower Extremity Kinematics in Runners with Patellofemoral Pain during a Prolonged Run. Med. Sci. Sports Exerc. 2011, 43, 693–700. [Google Scholar] [CrossRef]
- Impellizzeri, F.M.; Marcora, S.M.; Coutts, A.J. Internal and External Training Load: 15 Years On. Int. J. Sports Physiol. Perform. 2019, 14, 270–273. [Google Scholar] [CrossRef] [PubMed]
- Barth, J.; Oberndorfer, C.; Pasluosta, C.; Schulein, S.; Gassner, H.; Reinfelder, S.; Kugler, P.; Schuldhaus, D.; Winkler, J.; Klucken, J.; et al. Stride Segmentation during Free Walk Movements Using Multi-Dimensional Subsequence Dynamic Time Warping on Inertial Sensor Data. Sensors 2015, 15, 6419–6440. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ghassemi, N.H.; Hannink, J.; Martindale, C.F.; Gassner, H.; Muller, M.; Klucken, J.; Eskofier, B.M. Segmentation of Gait Sequences in Sensor-Based Movement Analysis: A Comparison of Methods in Parkinson’s Disease. Sensors 2018, 18, 145. [Google Scholar] [CrossRef] [Green Version]
- Barton, J.G.; Lees, A. An application of neural networks for distinguishing gait patterns on the basis of hip-knee joint angle diagrams. Gait Posture 1997, 5, 28–33. [Google Scholar] [CrossRef]
- Wang, X.H.; Yan, W.Q. Non-local gait feature extraction and human identification. Multimedia Tools Appl. 2021, 80, 6065–6078. [Google Scholar] [CrossRef]
- Figueiredo, J.; Santos, C.P.; Moreno, J.C. Automatic recognition of gait patterns in human motor disorders using machine learning: A review. Med. Eng. Phys. 2018, 53, 1–12. [Google Scholar] [CrossRef]
- Lau, H.Y.; Tong, K.Y.; Zhu, H.L. Support vector machine for classification of walking conditions of persons after stroke with dropped foot. Hum. Mov. Sci. 2009, 28, 504–514. [Google Scholar] [CrossRef]
- Gholami, M.; Napier, C.; Patino, A.G.; Cuthbert, T.J.; Menon, C. Fatigue Monitoring in Running Using Flexible Textile Wearable Sensors. Sensors 2020, 20, 5573. [Google Scholar] [CrossRef]
- Slijepcevic, D.; Zeppelzauer, M.; Schwab, C.; Raberger, A.M.; Breiteneder, C.; Horsak, B. Input representations and classification strategies for automated human gait analysis. Gait Posture 2020, 76, 198–203. [Google Scholar] [CrossRef]
- Burdack, J.; Horst, F.; Giesselbach, S.; Hassan, I.; Daffner, S.; Schollhorn, W.I. Systematic Comparison of the Influence of Different Data Preprocessing Methods on the Performance of Gait Classifications Using Machine Learning. Front. Bioeng. Biotechnol. 2020, 8, 260. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| First Level | Second Level | Third Level | ||||
|---|---|---|---|---|---|---|
| Man | Woman | Man | Woman | Man | Woman | |
| EC (METs) | 5 | 4 | 7 | 6 | 10 | 8 |
| V (m/min) +A (%) | 4.9 + 4 | 4.64 + 2 | 6.3 + 0 | 5.5 + 5 | 8.3 + 8 | 7.0 + 1 |
| R | L | R L | R Rv | R Rv L Ls | R Rv Ra L Lv La | ||
|---|---|---|---|---|---|---|---|
| Logistic regression | Accuracy (%) | 25.54 | 31.83 | 34.71 | 25.54 | 25.54 | 38.31 |
| MAE | 1.60 | 1.29 | 1.24 | 1.60 | 1.60 | 1.11 | |
| Random forest | Accuracy (%) | 80.04 | 77.52 | 87.23 | 80.04 | 80.04 | 87.95 |
| MAE | 0.33 | 0.38 | 0.21 | 0.33 | 0.33 | 0.19 | |
| GBDT | Accuracy (%) | 69.96 | 66.91 | 78.42 | 69.96 | 69.96 | 79.50 |
| MAE (%) | 0.51 | 0.57 | 0.37 | 0.51 | 0.51 | 0.36 | |
| SVM RBF | Accuracy (%) | 81.12 | 81.12 | 81.65 | 81.65 | 81.29 | 88.85 |
| MAE | 0.35 | 0.35 | 0.34 | 0.34 | 0.33 | 0.17 | |
| SVM linear | Accuracy (%) | 37.23 | 42.63 | 49.10 | 39.39 | 51.62 | 51.62 |
| MAE | 1.16 | 1.01 | 0.84 | 1.10 | 0.78 | 0.79 | |
| SVM poly | Accuracy (%) | 39.75 | 40.29 | 60.43 | 41.91 | 61.33 | 60.97 |
| MAE | 1.11 | 1.02 | 0.63 | 1.04 | 0.61 | 0.60 |
| R | L | R L | R Rv | R Rv L Ls | R Rv Ra L Lv La | ||
|---|---|---|---|---|---|---|---|
| Logistic regression | Accuracy (%) | 21.22 | 23.02 | 31.83 | 24.10 | 30.40 | 28.60 |
| MAE | 1.55 | 1.23 | 1.26 | 1.45 | 1.27 | 1.35 | |
| Random forest | Accuracy (%) | 69.78 | 69.96 | 87.59 | 74.46 | 89.03 | 87.41 |
| MAE | 0.53 | 0.53 | 0.22 | 0.41 | 0.16 | 0.18 | |
| GBDT | Accuracy (%) | 61.87 | 66.19 | 78.60 | 68.71 | 83.09 | 82.01 |
| MAE (%) | 0.67 | 0.62 | 0.35 | 0.50 | 0.25 | 0.28 | |
| SVM RBF | Accuracy (%) | 28.42 | 28.78 | 37.59 | 31.47 | 37.77 | 39.03 |
| MAE | 1.29 | 1.35 | 1.21 | 1.25 | 1.19 | 1.21 | |
| SVM linear | Accuracy (%) | 19.24 | 25.90 | 29.14 | 30.22 | 26.08 | 22.66 |
| MAE | 1.43 | 1.32 | 1.17 | 1.16 | 1.63 | 1.56 | |
| SVM poly | Accuracy (%) | 22.12 | 22.66 | 33.63 | 25.00 | 35.97 | 37.59 |
| MAE | 1.56 | 1.29 | 1.28 | 1.51 | 1.17 | 1.17 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shi, S.; Cao, Z.; Li, H.; Du, C.; Wu, Q.; Li, Y. Recognition System of Human Fatigue State Based on Hip Gait Information in Gait Patterns. Electronics 2022, 11, 3514. https://doi.org/10.3390/electronics11213514
Shi S, Cao Z, Li H, Du C, Wu Q, Li Y. Recognition System of Human Fatigue State Based on Hip Gait Information in Gait Patterns. Electronics. 2022; 11(21):3514. https://doi.org/10.3390/electronics11213514
Chicago/Turabian StyleShi, Song, Ziping Cao, Hengheng Li, Chengming Du, Qiang Wu, and Yahui Li. 2022. "Recognition System of Human Fatigue State Based on Hip Gait Information in Gait Patterns" Electronics 11, no. 21: 3514. https://doi.org/10.3390/electronics11213514
APA StyleShi, S., Cao, Z., Li, H., Du, C., Wu, Q., & Li, Y. (2022). Recognition System of Human Fatigue State Based on Hip Gait Information in Gait Patterns. Electronics, 11(21), 3514. https://doi.org/10.3390/electronics11213514