1. Introduction
Time delays will inevitably occur in communication channels when a growing number of closed-loop systems are implemented using communication networks. It is generally understood that the presence of time delay in a dynamical system frequently leads to a decrease in system stability and performance. The operation of the smart electrical system may be impacted by communication delays, which could result in power losses and frequency variation. It is crucial to look into the sources of these issues and the potential mitigation methods. Due to the significant worldwide contribution of conventional vehicles to CO
2 emissions, electric vehicles (EVs) have drawn a lot of interest. This has raised the possibility that EV power generation could improve the reliability of the energy supply. For instance, the vehicle-to-grid (V2G) concept enables vehicles to return stored energy during their idling time to the grid during peak demand periods, thereby enhancing the operation of power systems [
1]. The framework of the traditional load frequency control (LFC) system has been enhanced [
2] due to the widespread use of EVs in current networks and their significant potential to contribute to markets for ancillary services. As a result, it is important to take into account the delay-based stability of the LFC, which includes the EV aggregator. This literature review starts with a brief analysis of the works that discuss how EVs affect ancillary services. The effect of time-varying delays in EV aggregators on frequency regulation is then studied.
V2G is crucial to the 21st-century electric grid, which is based on renewable energy sources, as described in [
3]. Bidirectional power flows can result from using EV batteries for frequency control [
4]. A technology that has promise for the future operation of the power system is the use of EVs [
5]. Compared with traditional generators, EV batteries can interchange electricity with the network more quickly. Thus, taking EVs into account improves the LFC system’s dynamic stability. EV aggregators serve as the user interface between residential customers and the operator of the autonomous system. EV aggregators function for the autonomous system operator as a big portion of the generation or load, both of which can be utilized in auxiliary services in a controlled manner. Ref. [
6] investigated and analyzed the problem of stability in aperiodic-sampled data control systems with a time delay. The improvement of system performance in attendance with a time delay is a surprising phenomenon that can be obtained theoretically. However, in real-world applications, time delays are a ubiquitous occurrence that, depending on the circumstances, can either severely reduce the system’s performance or even cause it to become unstable. It should be noted that a frequency control service that takes into account the EV’s aggregator could result in a delay that varies in time in LFC schemes. The LFC frequency control system performance is affected by these delays. In some circumstances, insufficient consideration of time-varying delays leads to power system instability. Since delays have an impact on frequency regulation performance. Ref. [
7] expanded the traditional LFC model by incorporating numerous EV aggregators with different delay characteristics. In automatic generation control, communication networks send control instructions to EVs. The dedicated open network determines the type of access to communication networks. The apparent relationship between cost and price in the open communication network is used to calculate the access rate to communication resources. The stability of time-delayed LFC systems involves the calculation of the delay margin and the configuration of the controller’s parameters. The maximum amount of time delay that a system can withstand before becoming unstable is known as the delay margin. Theoretical delay margins are calculated for a variety of controller gains, and simulation studies are used to confirm their accuracy.
A delay-based stability analysis of frequency control was conducted in [
8]. For large-scale power systems, precise delay margins can be calculated using an efficient method, provided in [
9]. A delay-based stability analysis of networked LFC systems in single and multi-area power systems was investigated and analyzed in [
10]. One of the methods for analyzing the stability of time-varying delay systems was the delay-dependent matrix-based estimate methodology. The less conservative stability criteria in linear matrix inequality (LMI) could be met by the estimate approach [
7]. Delay-dependent LMI-based stability analysis approaches have been primarily used for delayed LFC systems. These techniques are frequently employed in stability studies of time-delayed LFC systems and have produced outstanding outcomes. To enhance the numerical tractability of delay-dependent stability, Ref. [
11] presented the chordal sparsity and symmetry of an LFC loop graph. In [
12], the authors demonstrated how to construct a criterion for assessing the delay-dependent stability of a multi-area scheme that contains unknown and time-varying load oscillation. This was accomplished by analyzing the relationship between the delay and the stability.
As seen in [
13], the conservatism of the hierarchy stability criterion could be reduced by using multiple integral approaches and the free-weighting matrix technique. Ref. [
14] researched ways to assess the stability of the microgrid in the presence of plug-in electric vehicles and communication delays. The performance analysis of a multi-area decentralized LFC with time-varying delays was presented in [
15]. In another study, an augmented LKF was proposed to survey the stability of power systems with PI-based LFC systems in the presence of time-varying delays [
16]. The authors of [
17] investigated a decentralized frequency control based on a switching strategy, improving the stability in power mismatch and communication change. In [
18], the quadratic function, with regard to the time-varying delay, was frequently utilized as an analytical tool. The proposed lemma included an adjustable parameter to lower the conservatism; it reduces the popular lemma that is presently used by fixing a parameter as a particular value, and the benefits of the proposed lemma were demonstrated based on a numerical example.
In [
19], a fractional-order PI controller for a sample LFC system that takes into consideration time-based delay was developed. To overcome the limitations of conventional controllers, the need for accurate and fast-acting control over an LFC system seems necessary. In order to establish stability criteria and provide a method to increase calculation accuracy and decrease computation time, delay-dependent stability for an LFC system was introduced in [
20]. A new rebuilt model for the delayed LFC system taking wind power into account was described in Ref. [
21], and it attempts to increase the computational effectiveness of PID controllers while maintaining their dynamic performance.
Using memristor-based coupled neural networks [
22] apart from PI and PID controllers could be interesting for researchers. The use of time-varying delays in data transfer and uncertainty in a one-area network was analyzed in [
23]. In the research that has been performed on LFC schemes, the problem of delay-dependent stability in terms of obtaining a stability region, which provides the desired efficiency of the system, has not been investigated. Few works in the literature have been produced regarding the control domain, where there are many time-varying delay-dependent stability areas. In an LFC system, new criteria with delay dependencies in terms of LMIs were calculated using the augmented LKF [
24]. An augmented Lyapunov function and Wirtinger inequality were presented to maintain a stable condition in a large-scale multi-area LFC scheme with reduced conservatism. This was done to reduce the calculation burden of delay-dependent stability analysis and improve the accuracy of computation [
25]. Ref. [
26] constructed single and multiple time-varying delays to demonstrate delay margins of an example frequency regulation in the presence of EV aggregators. In addition, a Bessel–Legendre inequality-based LKF, as well as a model reconstruction technique, was proposed and used to analyze the delayed LFC system with EV aggregators [
27]. Another challenging issue is how to acquire more precise delay margins with less computational complexity. However, there are few studies examining the interdependence and interaction of LFC systems with time delays.
Table 1 is a summary of publications that were recently published on the subject of stability in time-delayed LFC systems.
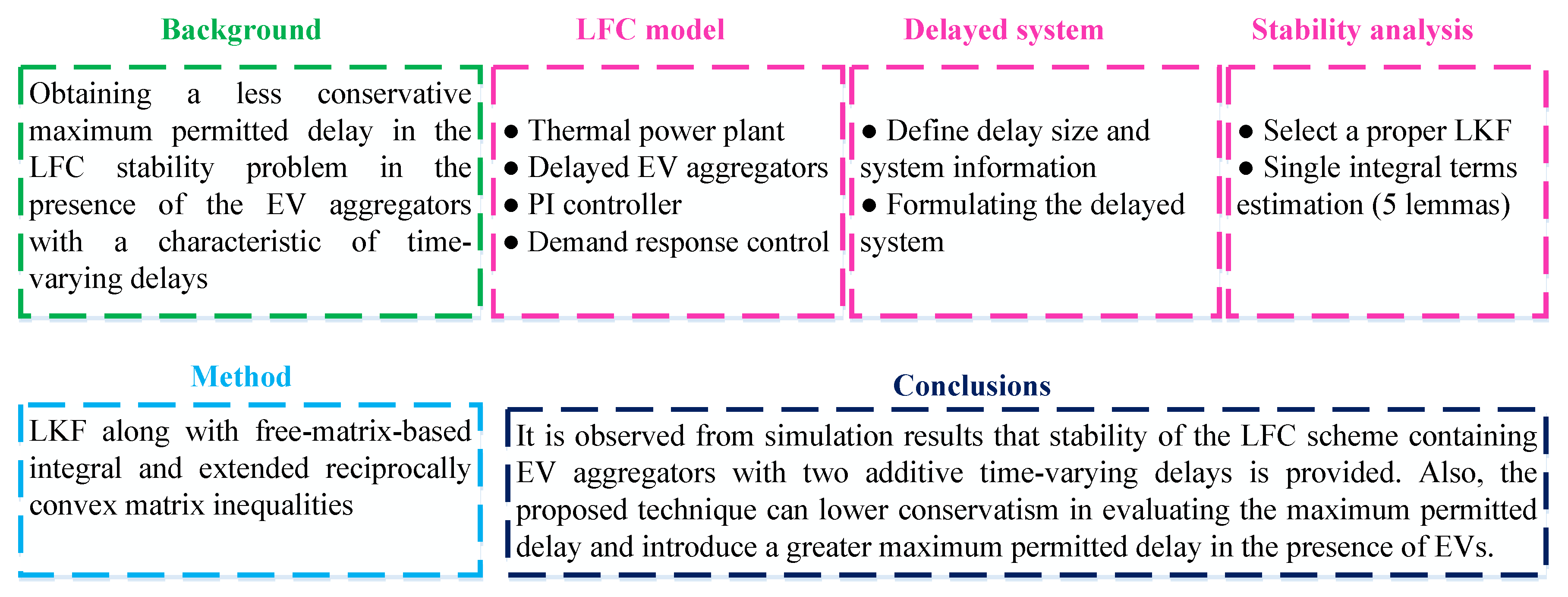
Regarding the aforementioned information, our work is driven by the necessity of reducing conservatism in the largest permitted delay computation, given that the LFC stability problem, combined with EV aggregator participation in frequency control, exhibits time-varying delays. The most significant contributions of this work can be described as follows:
The calculation of the stability regions and criteria with an improved delay interconnection LKF.
Using extended reciprocally convex matrix (ERCM) inequalities and a free-matrix-based integral (FMBI) to yield the upper bound of the derivative of the proposed LKF.
Investigating the various impacts of the EV aggregator participation ratio, with and without demand response (DR) control, on the maximum permitted delay.
The remainder of the paper will be presented below. In
Section 2, an LFC system with a delayed EV aggregator is described. In
Section 3, the stability analysis is studied. The findings of the simulation are presented in
Section 4, and the paper is concluded in
Section 5.
3. Analysis of Delayed System Stability
In order to determine the area of the system in which stability may be maintained, it is necessary to take into consideration the effects of temporal delays and conduct a stability analysis known as a delay-dependent stability analysis. The delay size and knowledge of the system both have a role in the delayed system’s stability. The strong stabilization of the delayed system is accomplished using the delay-dependent stability technique. It should be noted that this delay margin calculation theorem is conservative. Therefore, the Lyapunov–Krasovskii theorem is proposed since it is less conservative than other alternatives. The level of conservatism in the system stability analysis may be lowered by using the LMI framework to choose an appropriate Lyapunov–Krasovskii theorem that limits inequality.
It is commonly recognized that time delay is a key cause of instability and poor performance in many practical systems, such as communication networks and economic systems. Since the characteristics of the two delays may not be similar due to network conditions, it is unreasonable to combine them. Thus, the closed-loop system can be described as follows [
38,
39]:
where
and
are the system state vector, state coefficient matrix, and constant matrix, respectively.
and
indicate two additive delay components that are cumulative in the state. The terms
and
are exploited to show the upper bound of
and
, respectively. Let
,
, and
. The
is a continuously differentiable function. The PI controller is transformed into an output feedback problem before using the proposed theorem [
40]. Through the utilization of this transformation, the closed-loop state-space model can be derived as:
where
where
and
are the constant coefficients.
is the maximum permitted delay for a single EV’s aggregator. In the following, FMBI and ERCM inequalities can be utilized to estimate the single integral terms.
Lemma 1: Let be a differentiable signal infor a positive definite matrix,; the following inequality can be satisfied [41]: Lemma 2: Letbe a continuously differentiable signal infor a symmetric matrix; the following inequality can be satisfied [42]: where
Lemma 3: Letbe a differentiable signal infor symmetric matrices (and) and any matrices (and), thus satisfying the following [43]: The following inequality can be satisfied:
where
Lemma 4: For a real scalar, symmetric matrices, and any matrices (and), the following matrix inequality holds [44]: where
and
.
Lemma 5: Given the symmetric matrix, where, the following three conditions are equivalent [45]: According to current research trends, to achieve a less conservative stability criterion, the majority of studies are concentrated on two aspects: the construction of various types of innovative augmented LKFs and the development of more effective mathematical procedures for the derivative of LKFs. The main idea behind these methods is to add more time-delay information to the LKF process. However, this has a drawback where the computing burden increases dramatically as the complexity of the created LKFs and established mathematical approaches increases. Consequently, it appears essential and necessary to identify another plan to reach this objective. As a result, ERCM inequalities and FMBI are exploited to compute the derivative of the proposed LKF. Using the suggested methodology, having more information on the two time-varying delays leads to the obtainment of an improved stability criterion. Therefore, the following notations to avoid the vector and matrix representations are used:
.
Theorem 1: For specified scalarsand, if there are positive definite matrices (,, (q = 1,…, 7),, (i = 1, …, 6),) or symmetric matrices (, (j = 1,3)), then the system (6) is considered to be asymptotically stable even though it has two additive time-varying delay components that satisfy criterion (7) and any matrices (,, (k = 4,5), ) such that the following LMIs can be presented: The proof is in [
38]. The parameters of the LMIs equations are provided in the
Appendix A.




 ,
, 












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}