
Ability-Restricted Indoor Reconnaissance Task Planning for Multiple UAVs

Abstract
:1. Introduction
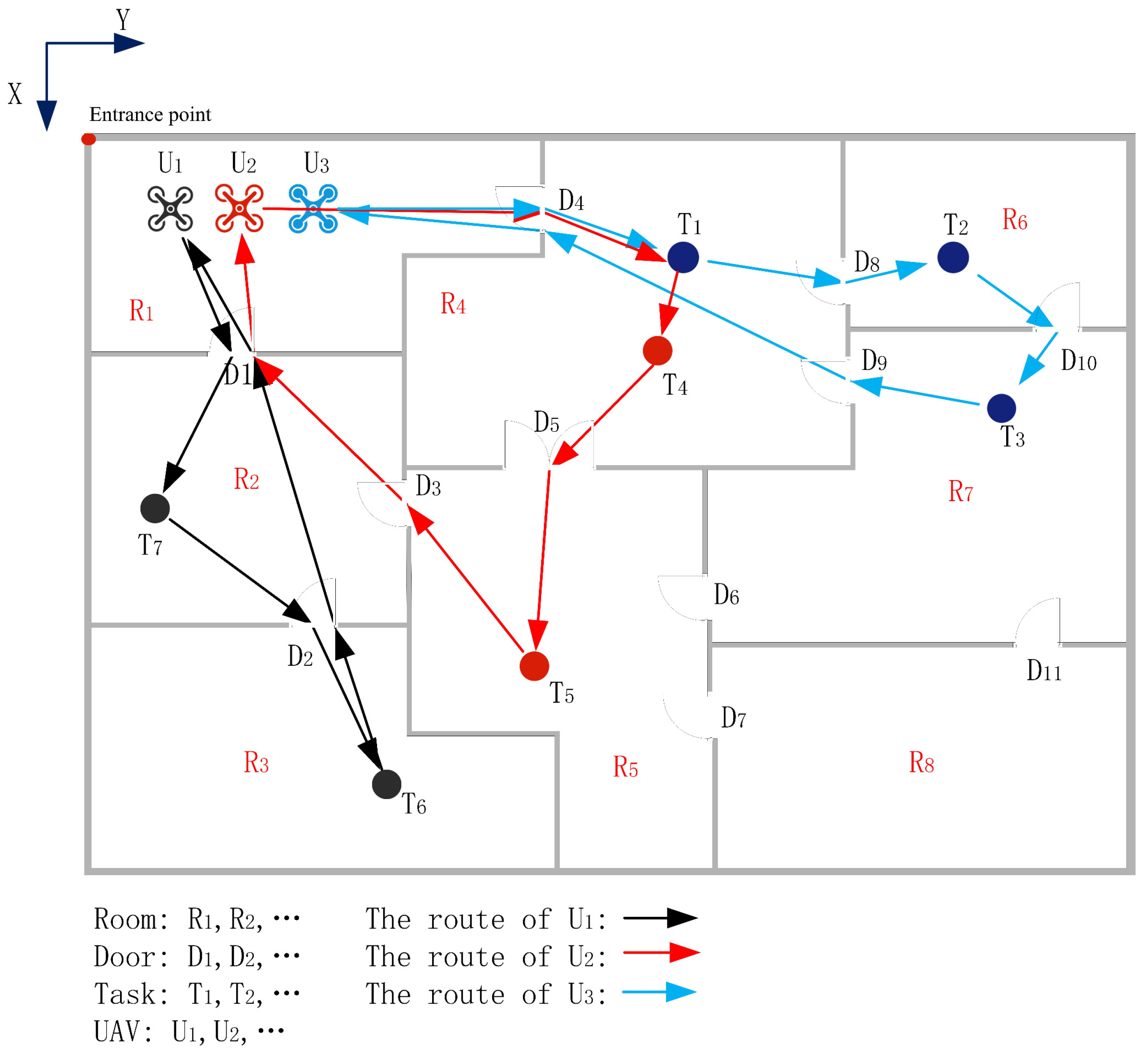
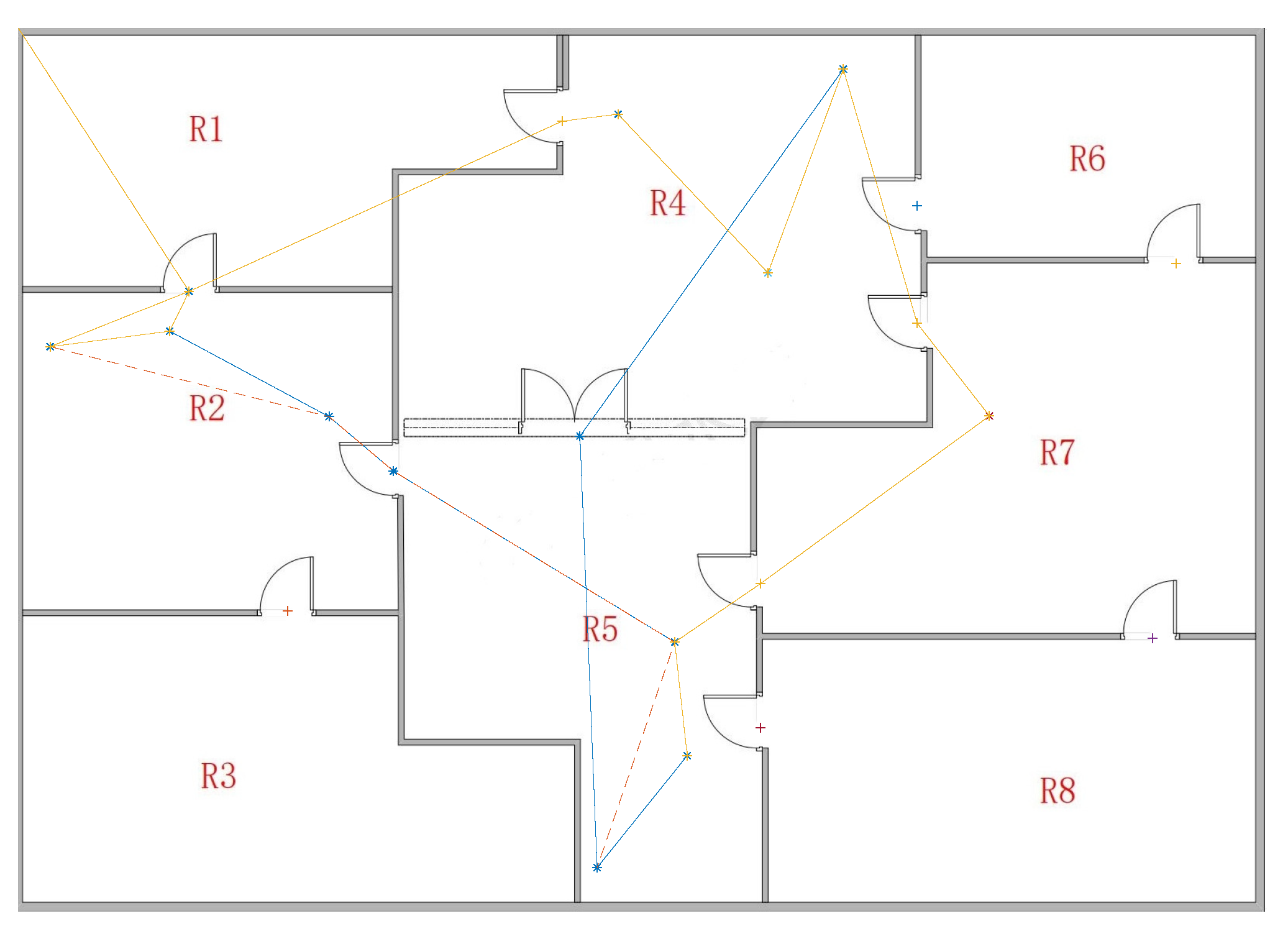
- The ARIRTP problem is modeled as a combinatorial optimization problem in which the requirements of the reconnaissance tasks and the abilities of UAVs have multiple dimensions. A topological map is used to present the connection relationships between indoor rooms and help UAVs to conduct global path planning;
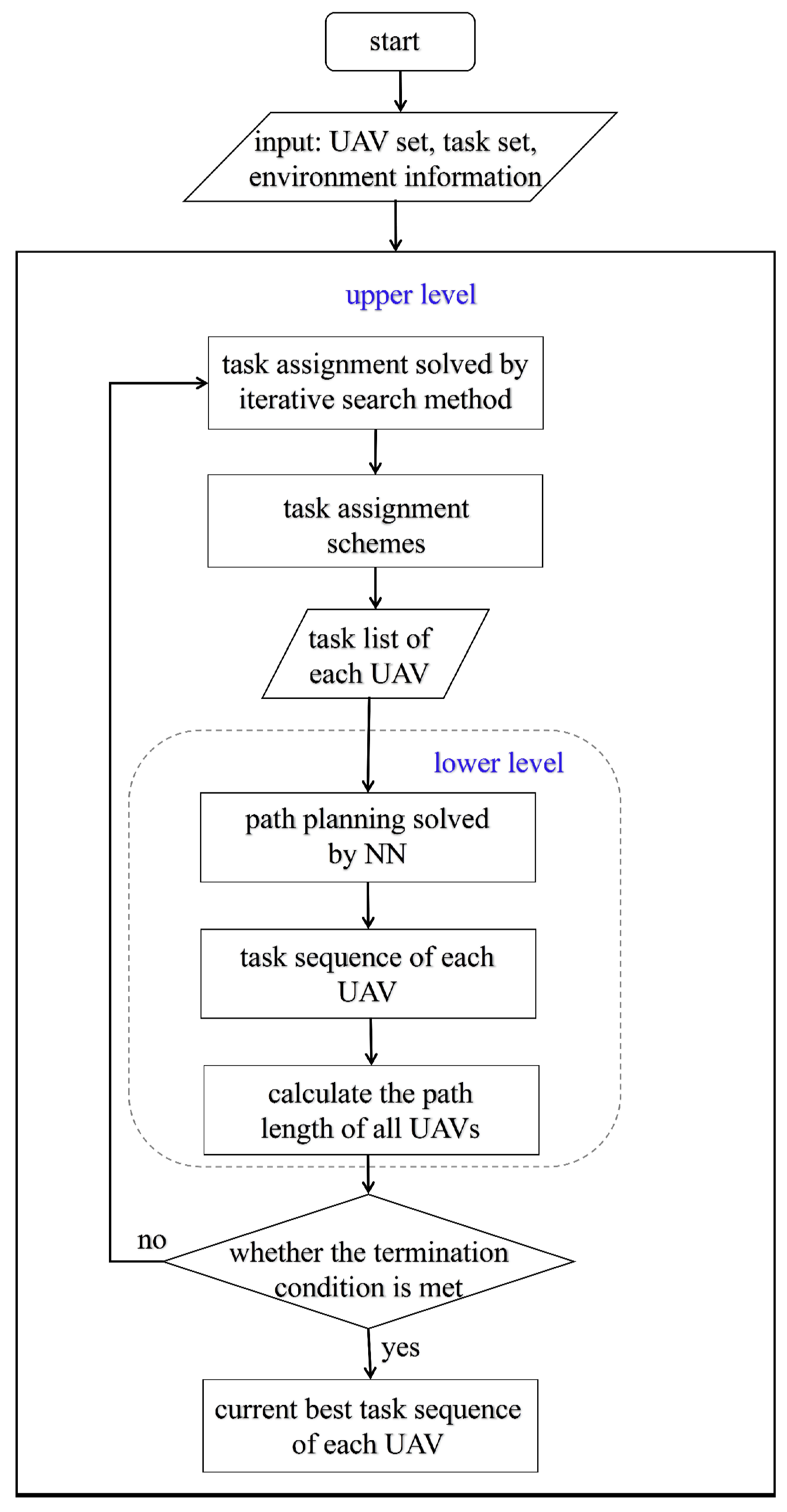
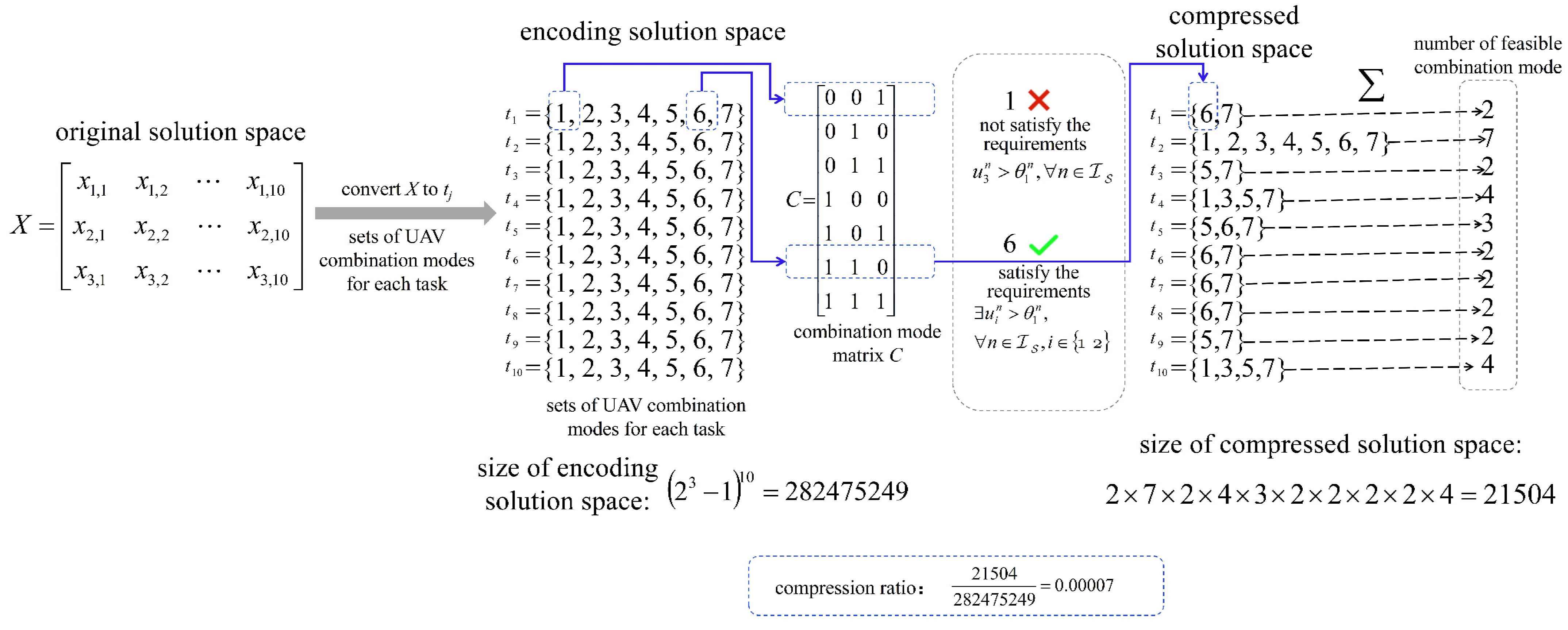
- A bi-level problem-solving framework is proposed for the ARIRTP problem. The upper level uses an iterative search algorithm to solve the task assignment problem of UAVs. According to the characteristics of the problem, a solution space compression mechanism is proposed to make the generated task assignment schemes meet the requirements of the reconnaissance tasks. The lower level uses the nearest neighbor (NN) algorithm to quickly construct the path sequence of each UAV based on the topology information of buildings;
- Two hybrid algorithms are proposed by applying the genetic algorithm (GA) and SA algorithm as the iterative search algorithms to the upper level of the bi-level problem-solving framework, respectively.
2. Problem Formulation
2.1. Problem Description
2.2. Environment Modeling
2.3. Problem Model
2.3.1. Assumptions
- UAVs(1) The curvature constraint of the UAVs is not considered because small-rotor UAVs are usually used in indoor environments and their flight speed is slow.(2) The collision avoidance problem of UAVs is ignored. If the trajectories of the UAVs have intersections, the UAV with a low task priority waits for the UAV with a high task priority to pass through the place where a collision may occur. Then, the UAV with the low task priority starts to perform its task again.(3) All the UAVs fly at the same constant speed.(4) The communication between the UAVs is ignored.
- Reconnaissance tasks(1) The reconnaissance tasks do not require the UAVs to perform the tasks synchronously.(2) The UAVs are not required to reach and leave the task points at the same time.(3) The reconnaissance time can be ignored.(4) If two task points are distributed in the same room, the distance between these two task points can be approximately expressed by the Euclidean distance. If two task points are distributed in different rooms that can be connected directly, the distance between the two task points can be approximately expressed by the sum of and . If two task points are distributed in different rooms that can be connected indirectly, the distance between the two task points can be approximately expressed by the sum of , , and . If two task points are distributed in two completely disconnected rooms, the distance between the two task points can be defined as infinity.
- Indoor environments(1) The information on the indoor map is known a priori.(2) Two connected rooms share only one door.(3) The rooms inside the building are fully connected, that is, a room can reach any other room through a certain topological relationship.(4) The no-fly zone and interference zone for the UAVs are not considered in indoor environments.(5) The obstacles in indoor environments will not affect the path planning of the UAVs because they can adjust their height to avoid obstacles and the time cost caused by adjusting the height can be ignored.
2.3.2. Decision Variables
2.3.3. Constraints
2.3.4. Cost Function
3. Algorithm Design
3.1. Bi-Level Problem-Solving Framework
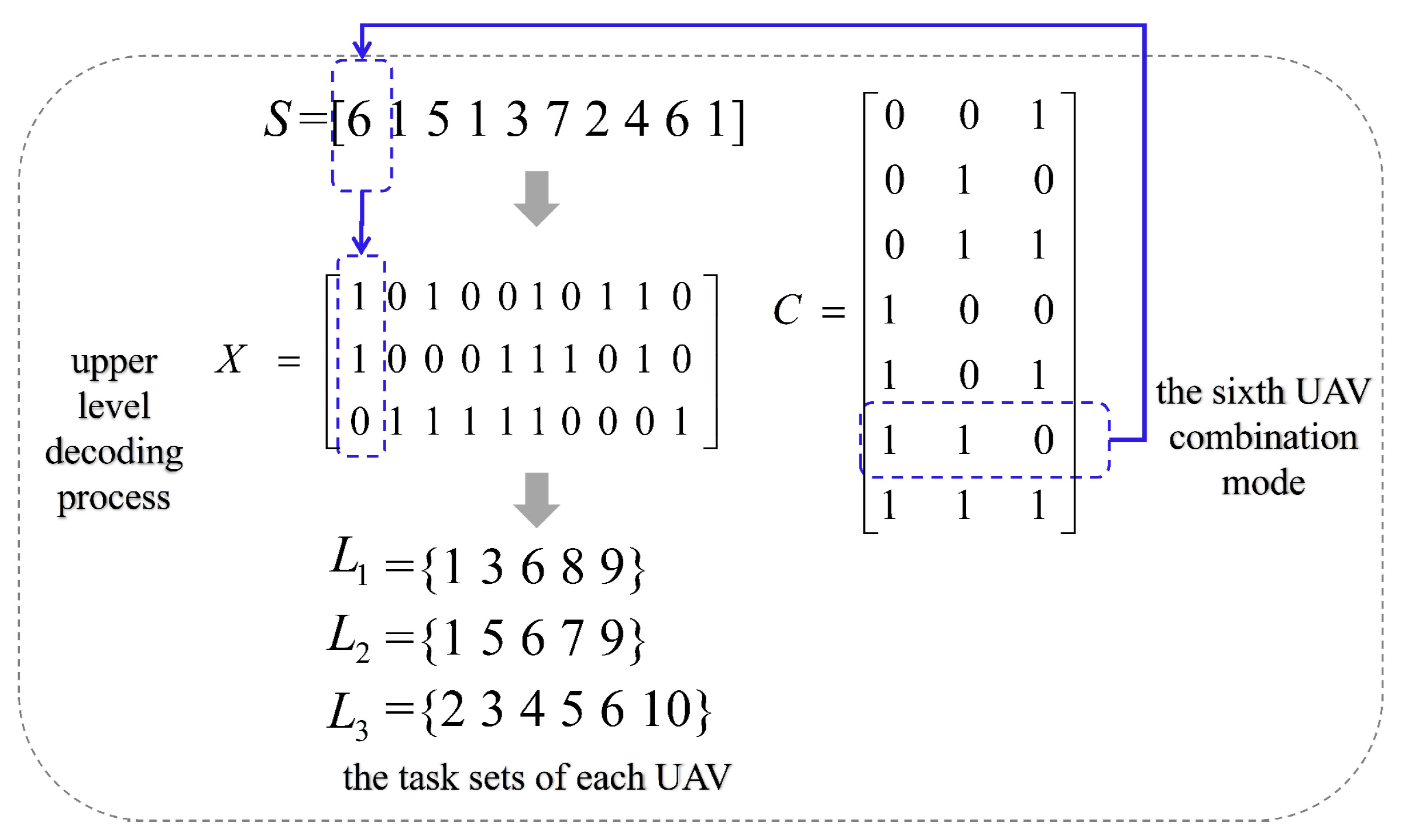
3.1.1. Task Assignment
| Algorithm 1 Solution space compression mechanism |
| 1. Input set |
| 2. For Traverse each task |
| 3. For Traverse each combination mode of UAVs |
| 4. If , The UAVs in the combination mode k all cannot satisfy the |
| 5. requirements of task j |
| 6. = ∖ { k } |
| 7. End if |
| 8. End for |
| 9. End for |
| 10. Output The compressed task list |
3.1.2. Path Planning
| Algorithm 2 Nearest neighbor algorithm based on topological map |
| 1. Input: task list L, start point , end point |
| 2. , , , the final path sequence list , total tour length |
| 3. For |
| 4. = , = |
| 5. While |
| 6. , Function is used to find the length of or |
| 7. For |
| 8. |
| 9. End for |
| 10. is temporary point |
| 11. = , = , = |
| 12. = , |
| 13. If , , |
| 14. Two points in two directly connected rooms |
| 15. = , |
| 16. Elseif , Two points in two indirectly |
| 17. connected rooms |
| 18. Based on Formulas (11) and (12) |
| 19. is a coordinate matrix of the doors (connecting the two points) |
| 20. |
| 21. End if |
| 22. End while |
| 23. = , = |
| 24. |
| 25. If , , |
| 26. = , |
| 27. Elseif , |
| 28. |
| 29. |
| 30. End if |
| 31. , Sequence length function is formula (14) |
| 32. is the visiting waypoint matrix of the i-th UAV |
| 33. , = , = , |
| 34. End for |
| 35. is the visiting waypoint matrix of all UAVs |
| 36. Output , |
3.2. Iterative Search Algorithm
3.2.1. Genetic Algorithm
| Algorithm 3 GA-NN |
| 1. Input: instances |
| 2. Set iteration number , maximum number of iterations , population size |
| 3. Selected population , population size |
| 4. Solution space compression According to Section 3.1.1 |
| 5. Initialize current population P Task assignment |
| 6. While Main loop |
| 7. For |
| 8. Rand number |
| 9. Objective value of individual i, according to Equations (17) and (18) and Algorithm 2 |
| 10. Fitness value of individual i, according to Equation (22) |
| 11. If |
| 12. |
| 13. End if |
| 14. End for |
| 15. , , |
| 16. |
| 17. While |
| 18. Two individuals are randomly selected |
| 19. According to Section 3.2.1 |
| 20. According to Section 3.2.1 |
| 21. |
| 22. |
| 23. End while |
| 24. If |
| 25. Population size is kept as |
| 26. End if |
| 27. |
| 28. End while |
| 29. Output the best individual |
3.2.2. Simulated Annealing Algorithm
| Algorithm 4 SA-NN |
| 1. Input: instances |
| 2. Set initial temperature T, cooling factor , stop iteration temperature |
| 3. Solution space compression According to Section 3.1.1 |
| 4. Generate an initialization solution , set the current solution = |
| 5. Set a best solution = |
| 6. Objective value of individual i, according to Equations (17) and (18) and |
| 7. Algorithm 2. Fitness evaluation according to Equation (22) |
| 8. Whereas T > |
| 9. For Metropolis chain length L |
| 10. Generate a new solution from based on the neighborhood search rules |
| 11. If > |
| 12. |
| 13. Else |
| 14. [0,1] Generate a random number |
| 15. If r < |
| 16. |
| 17. End if |
| 18. End if |
| 19. If < |
| 20. |
| 21. = |
| 22. End if |
| 23. End for |
| 24. |
| 25. End while |
| 26. Output the best individual |
4. Experimental Results
4.1. Data Sets
4.2. Parameter Settings
4.3. Performance Evaluation of Solution Space Compression Mechanism
4.4. ARIRTP Problem-Solving Results
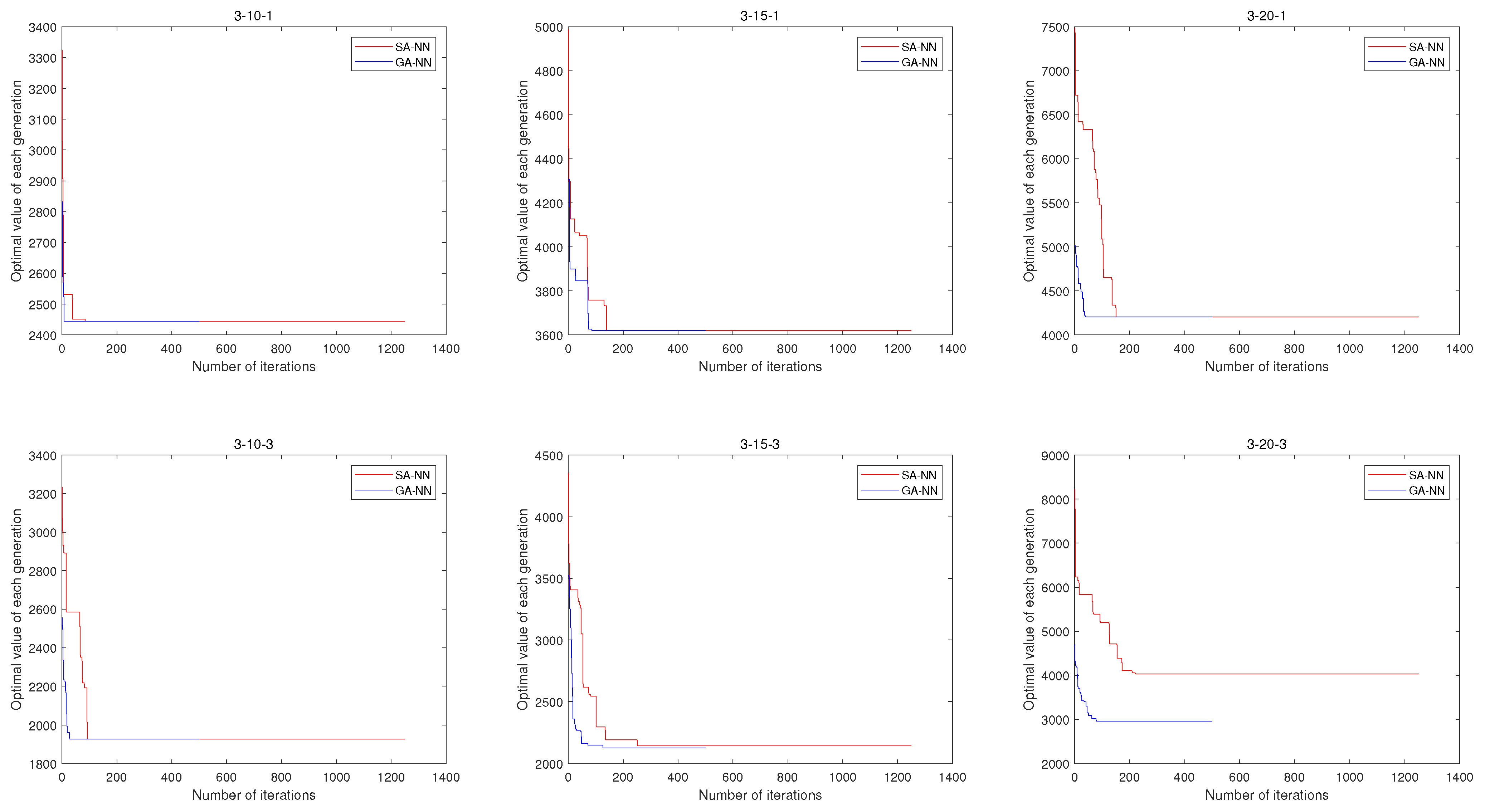
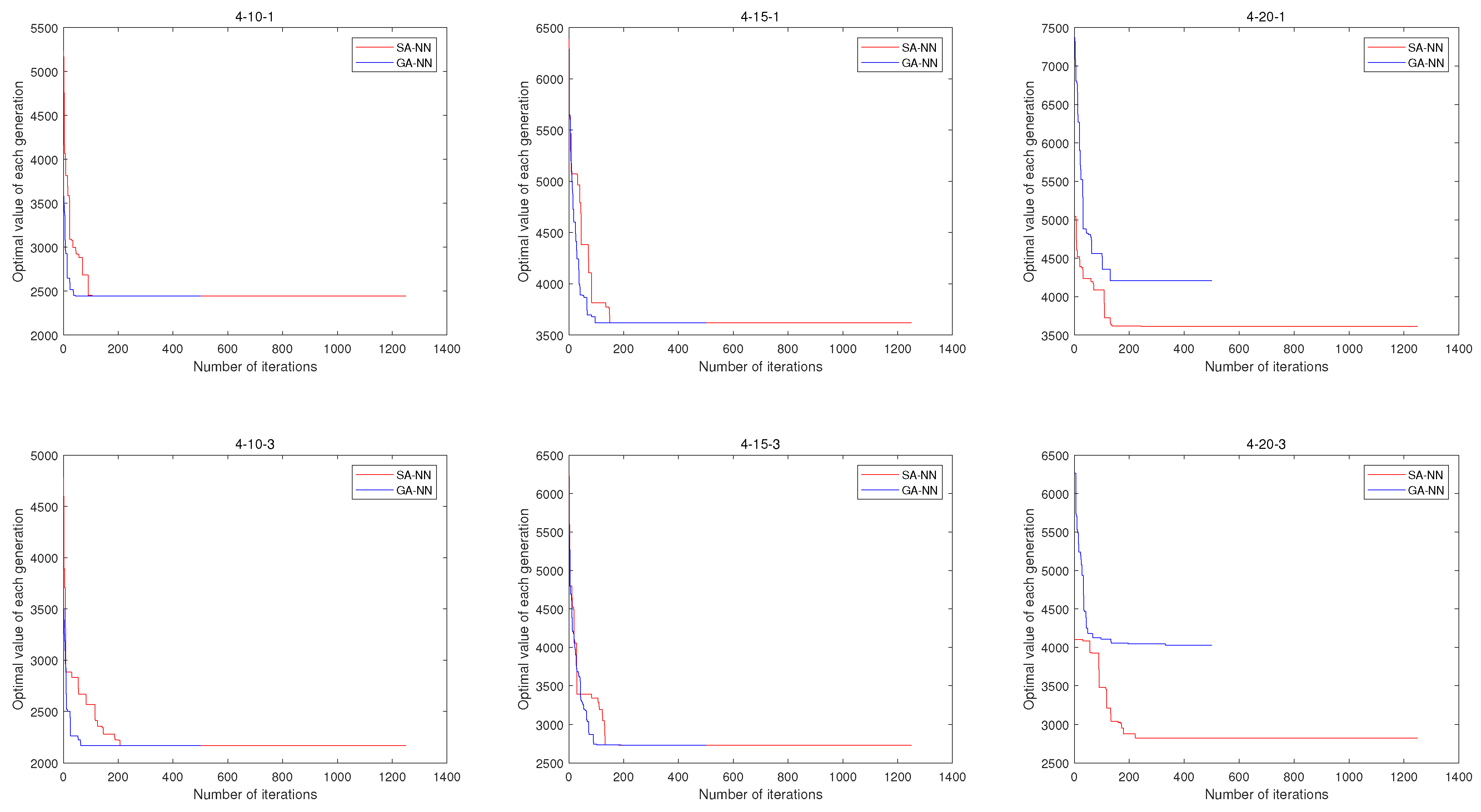
4.5. Performance Evaluation of the GA-NN and SA-NN Methods
5. Conclusions and Perspectives
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| ARIRTP | Ability-restricted indoor reconnaissance task planning |
| SSCM | Solution space compression mechanism |
| GA | Genetic algorithm |
| SA | Simulated annealing algorithm |
| NN | Nearest neighbor algorithm |
| GA-NN | Genetic algorithm–nearest neighbor algorithm |
| SA-NN | Simulated annealing algorithm–nearest neighbor algorithm |
| UAVs | Unmanned aerial vehicles |
| SJSA | Swap-and-judge simulated annealing algorithm |
| BACO | Bi-level ant colony optimization |
| CEVRP | Capacitated electric vehicle routing problem |
References
- Allam, A.; Nemra, A.; Tadjine, M. Parametric and implicit features-based UAV-UGVs time-varying formation tracking: Dynamic approach. Unmanned Syst. 2022, 10, 109–128. [Google Scholar] [CrossRef]
- Zammit, C.; Kampen, E.J. Comparison between A* and RRT algorithms for 3D UAV path planning. Unmanned Syst. 2022, 10, 129–146. [Google Scholar] [CrossRef]
- Khan, S.; Tufail, M.; Khan, M.T. A novel framework for multiple ground target detection, recognition and inspection in precision agriculture applications using a UAV. Unmanned Syst. 2022, 10, 45–56. [Google Scholar] [CrossRef]
- Li, Q.; Hua, Y.; Dong, X.; Yu, J.; Ren, Z. Time-varying formation tracking control for unmanned aerial vehicles with the leader’s unknown input and obstacle avoidance: Theories and applications. Electronics 2022, 11, 2334. [Google Scholar] [CrossRef]
- Zhang, J.; Chen, Y.; Yang, Q.; Lu, Y.; Shi, G.; Wang, S.; Hu, J. Dynamic task allocation of multiple UAVs based on improved A-QCDPSO. Electronics 2022, 11, 1028. [Google Scholar] [CrossRef]
- Chung, S.H.; Sah, B.; Lee, J. Optimization for drone and drone-truck combined operations: A review of the state of the art and future directions. Comput. Oper. Res. 2020, 123, 105004. [Google Scholar] [CrossRef]
- Macrina, G.; Pugliese, L.D.; Guerriero, F.; Laporte, G. Drone-aided routing: A literature review. Transp. Res. Part Emerg. Technol. 2020, 120, 102762. [Google Scholar] [CrossRef]
- Tamke, F.; Buscher, U. A branch-and-cut algorithm for the vehicle routing problem with drones. Transp. Res. Part Methodol. 2021, 144, 174–203. [Google Scholar] [CrossRef]
- Liu, Y.; Liu, Z.; Shi, J.M.; Wu, G.; Pedrycz, W. Two-echelon routing problem for parcel delivery by cooperated truck and drone. IEEE Trans. Syst. Man, Cybern. Syst. 2021, 51, 7450–7465. [Google Scholar] [CrossRef]
- Vasquez, S.A.; Angulo, G.; Klapp, M.A. An exact solution method for the TSP with drone based on decomposition. Comput. Oper. Res. 2021, 127, 105127. [Google Scholar] [CrossRef]
- Luo, Z.; Pan, B.; Zhang, Z.; Liu, Z.; Lim, A. The multi-visit traveling salesman problem with multi-drones. Transp. Res. Part Emerg. Technol. 2021, 128, 103172. [Google Scholar] [CrossRef]
- Cui, Y.J.; Dong, W.H.; Hu, D.X.; Liu, H.B. The application of improved harmony search algorithm to multi-UAV task assignment. Electronics 2022, 11, 1171. [Google Scholar] [CrossRef]
- Khan, A.; Zhang, J.; Ahmad, S.; Memon, S.; Qureshi, H.A.; Ishfaq, M. Dynamic positioning and energy-efficient path planning for disaster scenarios in 5G-assisted multi-UAV environments. Electronics 2022, 11, 2197. [Google Scholar] [CrossRef]
- Rudys, S.; Ragulis, P.; Laučys, A.; Bručas, D.; Pomarnacki, R.; Plonis, D. Investigation of UAV detection by different solid-state marine radars. Electronics 2022, 11, 2502. [Google Scholar] [CrossRef]
- Mostafa, S.A.; Mustapha, A.; Gunasekaran, S.S.; Ahmad, M.S.; Mohammed, M.A.; Parwekar, P.; Kadry, S. An agent architecture for autonomous UAV flight control in object classification and recognition missions. Soft Comput. 2021. [Google Scholar] [CrossRef]
- Greenwood, W.W.; Lynch, J.P.; Zekkos, D. Applications of UAVs in civil infrastructure. J. Infrastruct. Syst. 2019, 25, 04019002. [Google Scholar] [CrossRef]
- Sun, F.; Wang, X.; Zhang, R. Task scheduling system for UAV operations in agricultural plant protection environment. J. Ambient. Intell. Humaniz. Comput. 2020. [Google Scholar] [CrossRef]
- Shi, T.; Wang, H.; Cui, W.; Ren, L. Indoor space target searching based on EEG and EOG for UAV. Soft Comput. 2019, 23, 11199–11215. [Google Scholar] [CrossRef]
- Sampedro, C.; Rodriguez-Ramos, A.; Bavle, H.; Carrio, A.; de la Puente, P.; Campoy, P. A fully-autonomous aerial robot for search and rescue applications in indoor environments using learning-based techniques. J. Intell. Robot. Syst. 2019, 95, 601–627. [Google Scholar] [CrossRef]
- Khosiawan, Y.; Park, Y.; Moon, I.; Nilakantan, J.M.; Nielsen, I. Task scheduling system for UAV operations in indoor environment. Neural Comput. Appl. 2019, 31, 5431–5459. [Google Scholar] [CrossRef]
- González de Santos, L.M.; Frías Nores, E.; Martínez Sánchez, J.; González Jorge, H. Indoor path-planning algorithm for UAV-based contact inspection. Sensors 2021, 21, 642. [Google Scholar] [CrossRef] [PubMed]
- Bouzid, Y.; Bestaoui, Y.; Siguerdidjane, H. Guidance-control system of a quadrotor for optimal coverage in cluttered environment with a limited onboard energy. J. Intell. Robot. Syst. 2019, 95, 707–730. [Google Scholar] [CrossRef]
- Huo, L.; Zhu, J.; Wu, G.; Li, Z. A novel simulated annealing based strategy for balanced UAV task assignment and path planning. Sensors 2020, 20, 4769. [Google Scholar] [CrossRef] [PubMed]
- Chen, H.X.; Nan, Y.; Yang, Y. Multi-UAV reconnaissance task assignment for heterogeneous targets based on modified symbiotic organisms search algorithm. Sensors 2019, 19, 734. [Google Scholar] [CrossRef] [Green Version]
- Jia, Y.H.; Mei, Y.; Zhang, M.J. A bilevel ant colony optimization algorithm for capacitated electric vehicle routing problem. IEEE Trans. Cybern. 2022, 52, 10855–10868. [Google Scholar] [CrossRef]
- Gomez, C.; Fehr, M.; Millane, A.; Hernandez, A.C.; Nieto, J.; Barber, R.; Siegwart, R. Hybrid topological and 3D dense mapping through autonomous exploration for large indoor environments. In Proceedings of the 2020 IEEE International Conference on Robotics and Automation (ICRA), Paris, France, 31 May–31 August 2020; pp. 9673–9679. [Google Scholar]
- Ruan, W.Y.; Duan, H.B. Multi-UAV obstacle avoidance control via multi-objective social learning pigeon-inspired optimization. Front. Inf. Technol. Electron. Eng. 2020, 21, 740–748. [Google Scholar] [CrossRef]
- Dai, H.; Lu, W.; Li, X.; Yang, J.; Meng, D.; Liu, Y.; Liang, B. Cooperative planning of multi-agent systems based on task-oriented knowledge fusion with graph neural networks. Front. Inf. Technol. Electron. Eng. 2022, 23, 1069–1076. [Google Scholar] [CrossRef]
- Dhiman, N.K.; Deodhare, D.; Khemani, D. Where am I? Creating spatial awareness in unmanned ground robots using SLAM: A survey. Sadhana 2015, 40, 1385–1433. [Google Scholar] [CrossRef]
- Mccammon, S.; Hollinger, G.A. Topological path planning for autonomous information gathering. Auton. Robot. 2021, 45, 821–842. [Google Scholar] [CrossRef]
- He, S.W.; Kilgour, D.M.; Hipel, K.W. A three-level hierarchical graph model for conflict resolution. IEEE Trans. Syst. Man, Cybern. Syst. 2021, 51, 1424–1433. [Google Scholar] [CrossRef]
- Zhu, Z.M.; Kilgour, D.M.; Hipel, K.W. A new approach to coalition analysis within the graph model. IEEE Trans. Syst. Man, Cybern. Syst. 2020, 50, 2231–2241. [Google Scholar] [CrossRef]
- Zhang, H.; Xin, B.; Dou, L.; Chen, J.; Hirota, K. A review of cooperative path planning of an unmanned aerial vehicle group. Front. Inf. Technol. Electron. Eng. 2020, 21, 1671–1694. [Google Scholar] [CrossRef]
- Ding, Y.L.; Xin, B.; Chen, J. A review of recent advances in coordination between unmanned aerial and ground vehicles. Unmanned Syst. 2021, 09, 97–117. [Google Scholar] [CrossRef]
- Chen, J.; Ding, Y.; Xin, B.; Yang, Q.; Fang, H. A unifying framework for human-agent collaborative systems-part I: Element and relation analysis. IEEE Trans. Cybern. 2022, 52, 138–151. [Google Scholar] [CrossRef]
- Chen, J.; Ding, Y.; Xin, B.; Yang, Q.; Fang, H. A unifying framework for human-agent collaborative systems-part II: Design procedure and application. IEEE Trans. Cybern. 2021, 52, 11990–12002. [Google Scholar]
- Tao, Y.; Wen, Y.; Gao, H.; Wang, T.; Wan, J.; Lan, J. A path-planning method for wall surface inspection robot based on improved genetic algorithm. Electronics 2022, 11, 1192. [Google Scholar] [CrossRef]
- Xiao, S.; Tan, X.; Wang, J. A simulated annealing algorithm and grid map-based UAV coverage path planning method for 3D reconstruction. Electronics 2021, 10, 853. [Google Scholar] [CrossRef]
- Available online: https://mavrovouniotis.github.io/EVRPcompetition2020/ (accessed on 19 July 2020).
- Wang, Y.Y.; Jiao, X.H. Multi-objective energy management for PHEV using Pontryagin’s minimum principle and particle swarm optimization online. Sci.-China-Inf. Sci. 2021, 64, 119204. [Google Scholar] [CrossRef]
- Chen, L.; Xin, B.; Chen, J. Interactive multiobjective evolutionary algorithm based on decomposition and compression. Sci.-China-Inf. Sci. 2021, 64, 202201. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbols | Description |
|---|---|
| Total number of UAVs | |
| Total number of tasks | |
| Total number of sensor types | |
| i | Index of UAVs |
| Index of tasks | |
| Index of doors | |
| n | Index of sensor types |
| k | Index of the combination mode of UAVs |
| Tour length of UAV i | |
| Maximum endurance of UAV i | |
| Threshold of the demand on the n-th sensor type in task j | |
| Ability value of the n-th sensor type for UAV i | |
| Task list of UAV i | |
| Task sequence of UAV i | |
| Total number of tasks assigned to UAV i | |
| Distance between the position of task j and task q | |
| Distance between the position of task j and door h | |
| Distance between the position of door h and door g | |
| Distance between the position of door g and task q | |
| Assignment scheme | |
| Task j is assigned to UAV i or not | |
| L = { } | Task list of total UAVs |
| P = { } | Task sequence set of total UAVs |
| ={1, 2, ⋯, } | Index set of the UAV |
| ={1, 2, ⋯, } | Index set of the task |
| ={1, 2, ⋯, } | Index set of the sensor type |
| 1. Vector S |
| 2. Construct combination mode matrix C According to Formula (17) |
| 3. Transfer S to X referring to C Obtain a complete task assignment scheme |
| 4. Obtain based on X Obtain the task lists |
| 5. Set |
| 6. For |
| 7. For |
| 8. |
| 9. If |
| 10. |
| 11. End if |
| 12. End for |
| 13. End for |
| 14. Output L |
| Instance | Scale | Concentration | Brute Force Algorithm | GA-NN without SSCM | GA-NN | |||
|---|---|---|---|---|---|---|---|---|
| t | min | t | min | t | min | |||
| 1 | 3-10-1 | Sparse (0.00002 times) | 1.439 s | 2762 | 0.937 s | |||
| 2 | 3-10-2 | Sparse (0.00014 times) | 43.892 s | 2585 | 1.022 s | |||
| 3 | 3-10-3 | Dense (0.003 times) | 451.579 s | 2776 | 1.185 s | |||
| 4 | 3-10-4 | Dense (0.019 times) | – | – | 2762 | 1.209 s |
| Instance | Scale | Concentration | Brute Force Algorithm | SA-NN | GA-NN | BACO | SJSA | |||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| t | min | t | min | t | min | t | min | t | min | |||
| 1 | 3-10-1 | Sparse (0.00002 times) | 1.439 s | 8.178 s | 0.937 s | 9.101 s | ||||||
| 2 | 3-10-2 | Sparse (0.00014 times) | 43.892 s | 7.269 s | 1.022 s | 7.026 s | ||||||
| 3 | 3-10-3 | Dense (0.003 times) | 451.579 s | 7.676 s | 1.185 s | 8.755 s | ||||||
| 4 | 3-10-4 | Dense (0.019 times) | – | – | 7.624 s | 1.209 s | 8.034 s | |||||
| 5 | 3-15-1 | Sparse (0.00000011 times) | 321.018 s | 11.582 s | 1.912 s | 13.135 s | ||||||
| 6 | 3-15-2 | Sparse (0.00038 times) | – | – | 12.310 s | 1.384 s | 14.347 s | |||||
| 7 | 3-15-3 | Dense (0.0031 times) | – | – | 11.724 s | 2144 | 1.209 s | 13.078 s | ||||
| 8 | 3-15-4 | Dense (0.0111 times) | – | – | 8.901 s | 1.921 s | 11.668 s | |||||
| 9 | 3-20-1 | Sparse (0.0000000006 times) | – | – | 17.188 s | 1.861 s | 20.181 s | |||||
| 10 | 3-20-2 | Sparse (0.000002 times) | – | – | 15.059 s | 2.762 s | 17.796 s | |||||
| 11 | 3-20-3 | Sparse (0.00036 times) | – | – | 16.316 s | 4028 | 3.118 s | 17.817 s | ||||
| 12 | 3-20-4 | Dense (0.0028 times) | – | – | 10.665 s | 3.564 s | 15.101 s | |||||
| 13 | 4-10-1 | Sparse (0.00002 times) | – | – | 9.791 s | 3.570 s | 13.268 s | |||||
| 14 | 4-10-2 | Sparse (0.00089 times) | – | – | 8.426 s | 2.854 s | 14.786 s | |||||
| 15 | 4-10-3 | Dense (0.0014 times) | – | – | 8.942 s | 3.859 s | 14.135 s | |||||
| 16 | 4-10-4 | Dense (0.0601 times) | – | – | 8.908 s | 2.616 s | 12.078 s | |||||
| 17 | 4-15-1 | Sparse (0.00000012 times) | – | – | 13.933 s | 3.277 s | 15.347 s | 3639 | ||||
| 18 | 4-15-2 | Sparse (0.0000022 times) | – | – | 15.607 s | 3.645 s | 17.455 s | 3693 | ||||
| 19 | 4-15-3 | Sparse (0.000048 times) | – | – | 13.645 s | 3.716 s | 16.078 s | 2983 | ||||
| 20 | 4-15-4 | Dense (0.1501 times) | – | – | 9.734 s | 3.233 s | 13.263 s | 1836 | ||||
| 21 | 4-20-1 | Sparse (0.0000000007 times) | – | – | 15.777 s | 4206 | 5.196 s | 4310 | 19.181 s | 4341 | ||
| 22 | 4-20-2 | Sparse (0.0000014 times) | – | – | 14.654 s | 3715 | 6.401 s | 19.822 s | 3857 | |||
| 23 | 4-20-3 | Sparse (0.0000338 times) | – | – | 12.500 s | 4028 | 6.005 s | 4152 | 19.796 s | 3169 | ||
| 24 | 4-20-4 | Dense (0.087 times) | – | – | 12.305 s | 2066 | 7.163 s | 2208 | 15.817 s | 1930 |
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 | |
| Mann–Whitney U test | 0/0/30 | 0/0/30 | 0/0/30 | 0/0/30 | 0/0/30 | 0/0/30 | 0/0/30 | 0/0/30 | 0/0/30 | 0/0/30 | 0/28/2 | 0/0/30 |
| Kolmogorov–Smirnov test | 0/0/30 | 0/0/30 | 0/0/30 | 0/0/30 | 0/0/30 | 0/0/30 | 0/0/30 | 0/0/30 | 0/0/30 | 0/0/30 | 0/27/3 | 0/0/30 |
| Instances | 13 | 14 | 15 | 16 | 17 | 18 | 19 | 20 | 21 | 22 | 23 | 24 |
| Mann–Whitney U test | 0/0/30 | 0/0/30 | 0/0/30 | 0/0/30 | 0/0/30 | 0/0/30 | 0/0/30 | 0/0/30 | 28/0/2 | 27/0/3 | 30/0/0 | 24/0/6 |
| Kolmogorov–Smirnov test | 0/0/30 | 0/0/30 | 0/0/30 | 0/0/30 | 0/0/30 | 0/0/30 | 0/0/30 | 0/0/30 | 30/0/0 | 29/0/1 | 30/0/0 | 22/0/8 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, R.; Dou, L.; Wang, Q.; Xin, B.; Ding, Y. Ability-Restricted Indoor Reconnaissance Task Planning for Multiple UAVs. Electronics 2022, 11, 4227. https://doi.org/10.3390/electronics11244227
Zhang R, Dou L, Wang Q, Xin B, Ding Y. Ability-Restricted Indoor Reconnaissance Task Planning for Multiple UAVs. Electronics. 2022; 11(24):4227. https://doi.org/10.3390/electronics11244227
Chicago/Turabian StyleZhang, Ruowei, Lihua Dou, Qing Wang, Bin Xin, and Yulong Ding. 2022. "Ability-Restricted Indoor Reconnaissance Task Planning for Multiple UAVs" Electronics 11, no. 24: 4227. https://doi.org/10.3390/electronics11244227
APA StyleZhang, R., Dou, L., Wang, Q., Xin, B., & Ding, Y. (2022). Ability-Restricted Indoor Reconnaissance Task Planning for Multiple UAVs. Electronics, 11(24), 4227. https://doi.org/10.3390/electronics11244227