
Novel Multi-Vehicle Motion-Based Model of Trolleybus Grids towards Smarter Urban Mobility

 ,
,  ,
,  ,
, 
 and
and 
Abstract
:1. Introduction
2. Conventional Analytical Approach
2.1. Monitoring of Overloads and Overheating
- Each bilaterally supplied FS is symmetrical in relation to the two TPSSs (i.e., the line feeders leaving the TPSSs are assumed to be of identical lengths (i.e., same voltage drop), and the TPSSs themselves equally share the power delivered to the FS. Therefore, each TPSS supplies half of the line current;
- The two catenary lines constituting the FSs with bidirectional traffic (two-way street or different outward and return routes) are assumed to be electrically in parallel (i.e., the corresponding positive and negative poles are theoretically connected at infinite points along the whole OCL length). This leads to a perfect halving of the line current at any position.
2.2. Probability-Based Calculation of the Line Voltage Drop
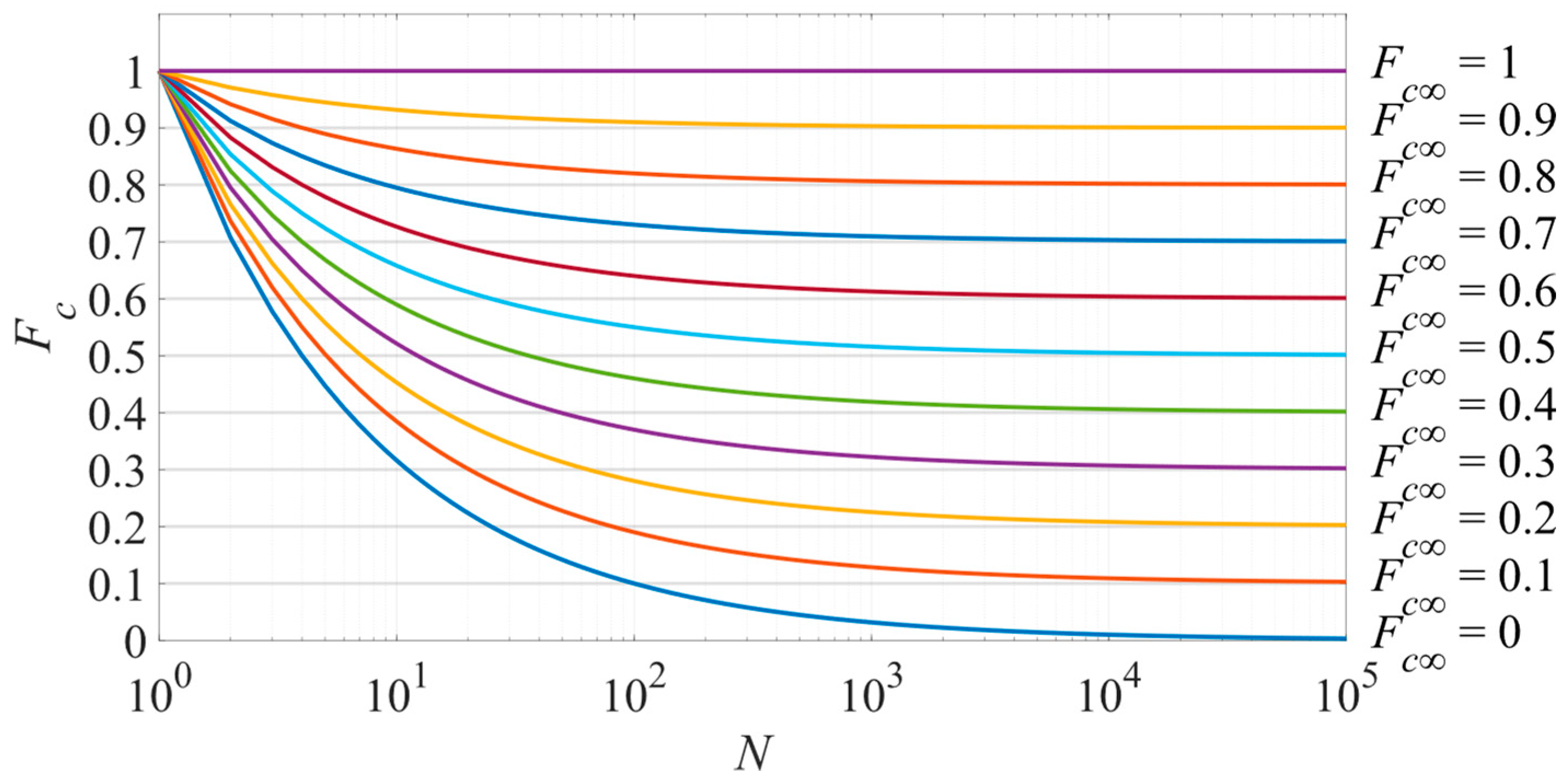
2.2.1. Probabilistic Derivation of the Current Consumption at the Feeding Section Macro-Level
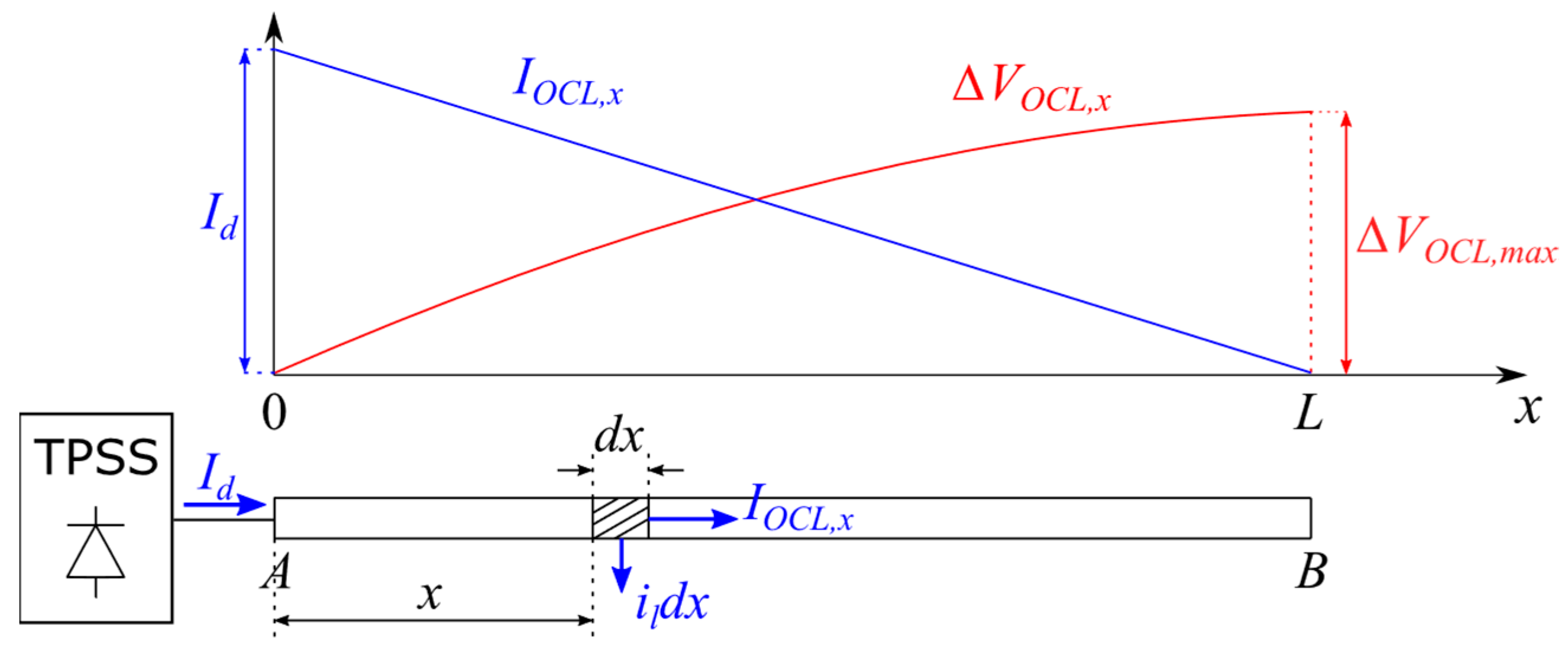
2.2.2. Voltage Drop Evaluation with a Unilateral Power Supply
- (a)
- Uniformly distributed load
- (b)
- Evenly spaced concentrated loads
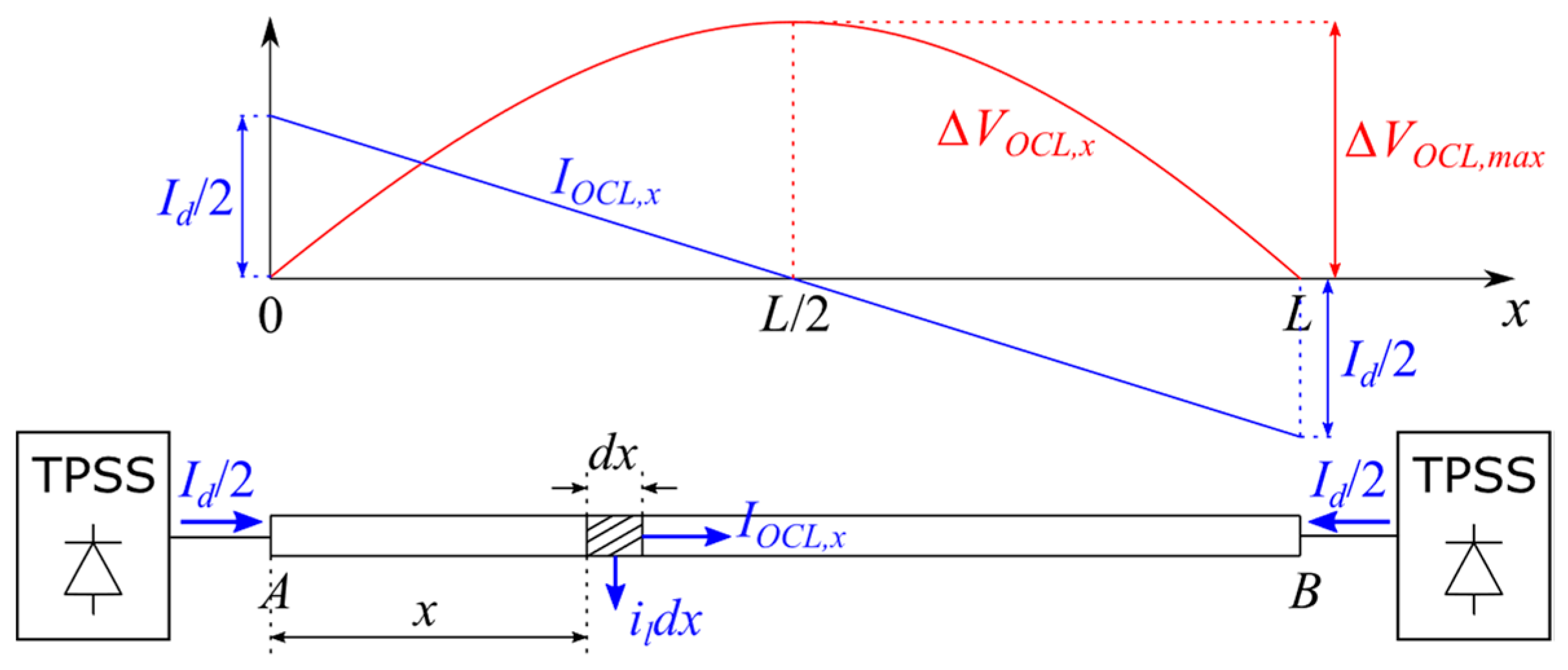
2.2.3. Voltage Drop Evaluation with a Bilateral Power Supply
- (a)
- Uniformly distributed load
- (b)
- Evenly spaced concentrated loads
3. Literature on the Simulation Tools
3.1. Fortran Language-Based Model
3.2. Variable Resistor-Based Catenary Modeling Using Simulink
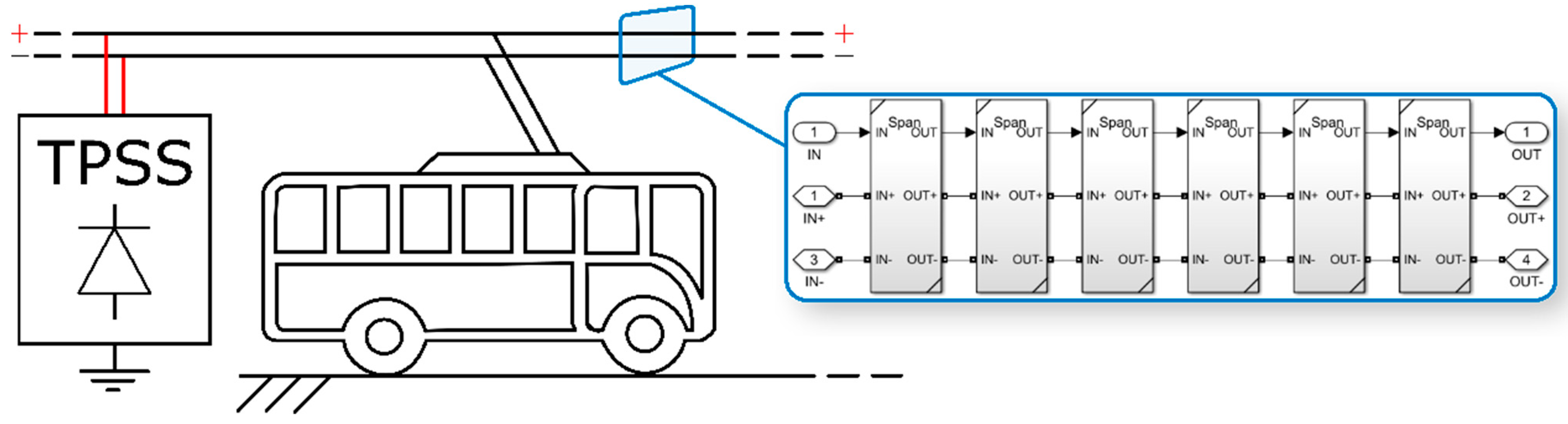
4. Proposed Multi-Vehicle Motion-Based Model of the Catenary in Simulink
4.1. Modular Catenary Modeling
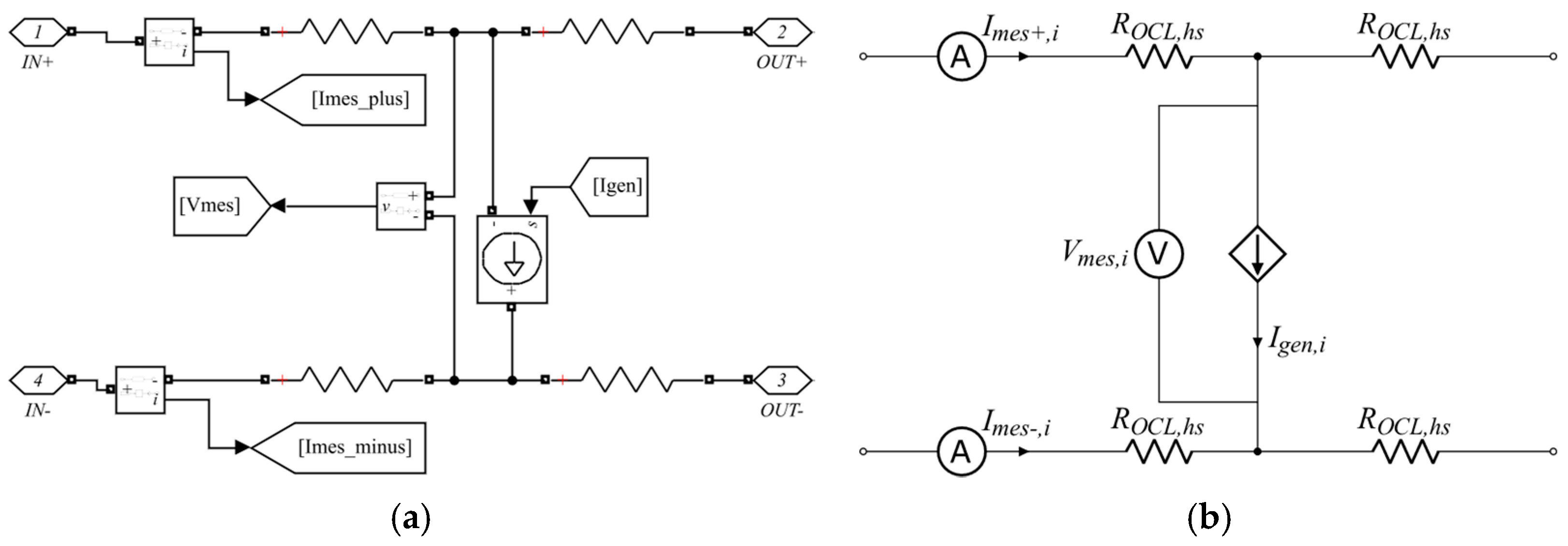
4.2. Electrical Parameter Evaluation
4.2.1. Voltage at the Trolleybus Location
4.2.2. OCL Temperature
5. Case Study of Feeding Sections in Bologna and Discussion of Results
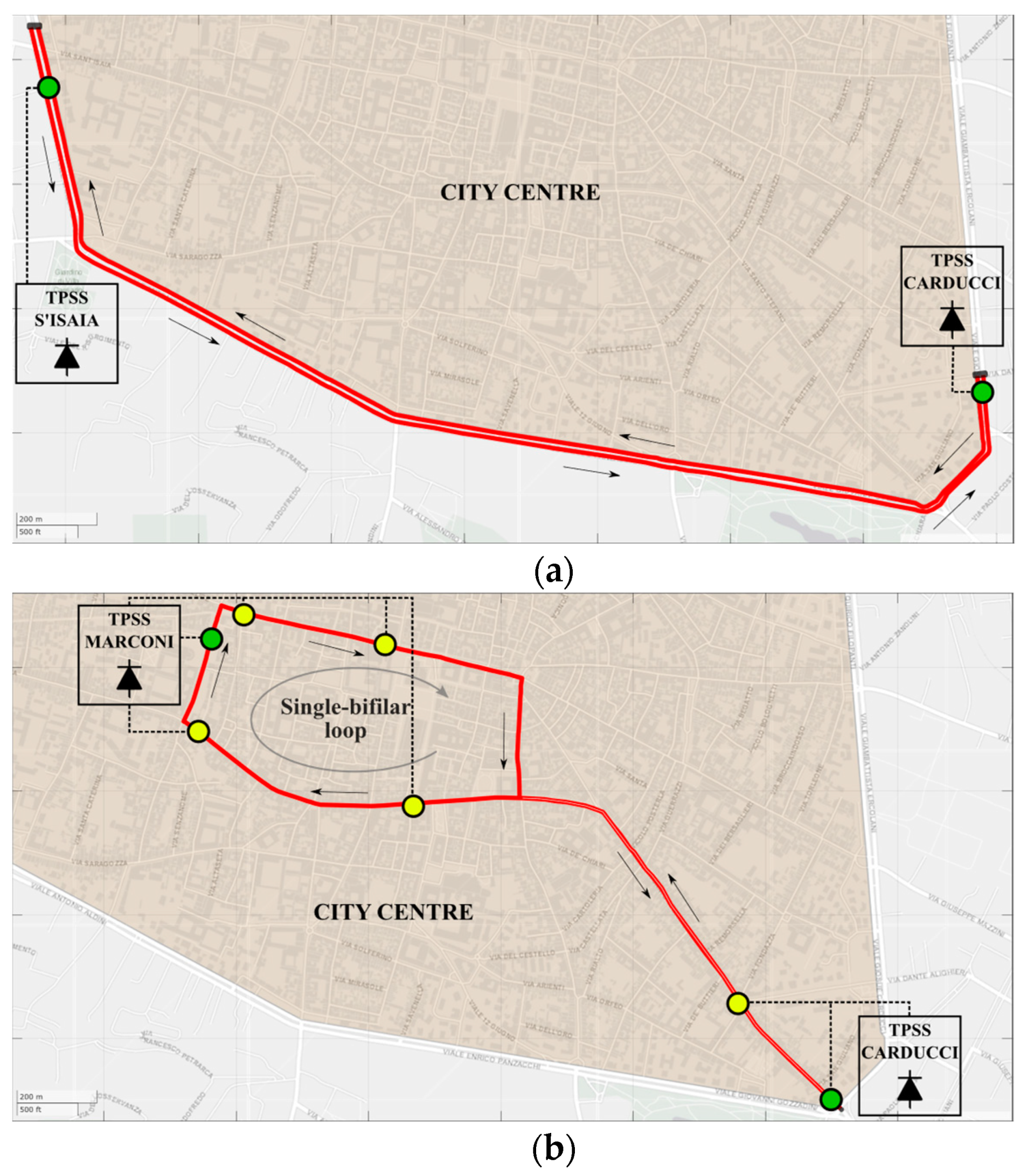
- FS “Sant’Isaia-Carducci” (FS 1): a bilaterally supplied FS (two feeding TPSSs (i.e., TPSS “Sant’Isaia” and TPSS “Carducci”) from which the FS designation was derived) with a basic topology (Figure 7a) (i.e., there exists an approximate symmetry of the double-bifilar line between the supply points). Rounded to the nearest multiple of 20 (i.e., the assumed span length in meters), the total bifilar length was 6240 m;
- FS “Marconi-Carducci” (FS 2): a bilaterally supplied FS with a complex structure (Figure 7b) due to the simultaneous presence of a double-bifilar line (towards TPSS “Carducci”) and a single two-wire loop (in the direction of TPSS “Marconi”), as well as the power support via several reinforcing feeders. Assuming the approximation made in the case above was valid, the total bifilar length was 4540 m.
- When analyzing the line current and temperature distributions, the total average current IM in the FS was set as the overall load absorption (refer to Section 2.1) (i.e., for the sake of simplicity, each current source modeling the trolleybus drew (when due) a constant current IT,j = IM/N);
- Because of the structure of the conventional approach, we knew that it provided only one current and one temperature value for each FS, which both related to a worst-case scenario. Therefore, for the purpose of comparison, it was sensible to pick the maximum line current and temperature that the simulation gave along the whole FS;
- Similar to what has been emphasized about the current and temperature, the line voltage profile was evaluated by imposing the total starting current IS in the FS as whole load absorption (see Section 2.2). Each vehicle thus drew a constant current IT,j = IS/N;
- The maximum voltage drop along the catenary section belonging to a certain FS was given by the difference between the maximum and the minimum voltage value.
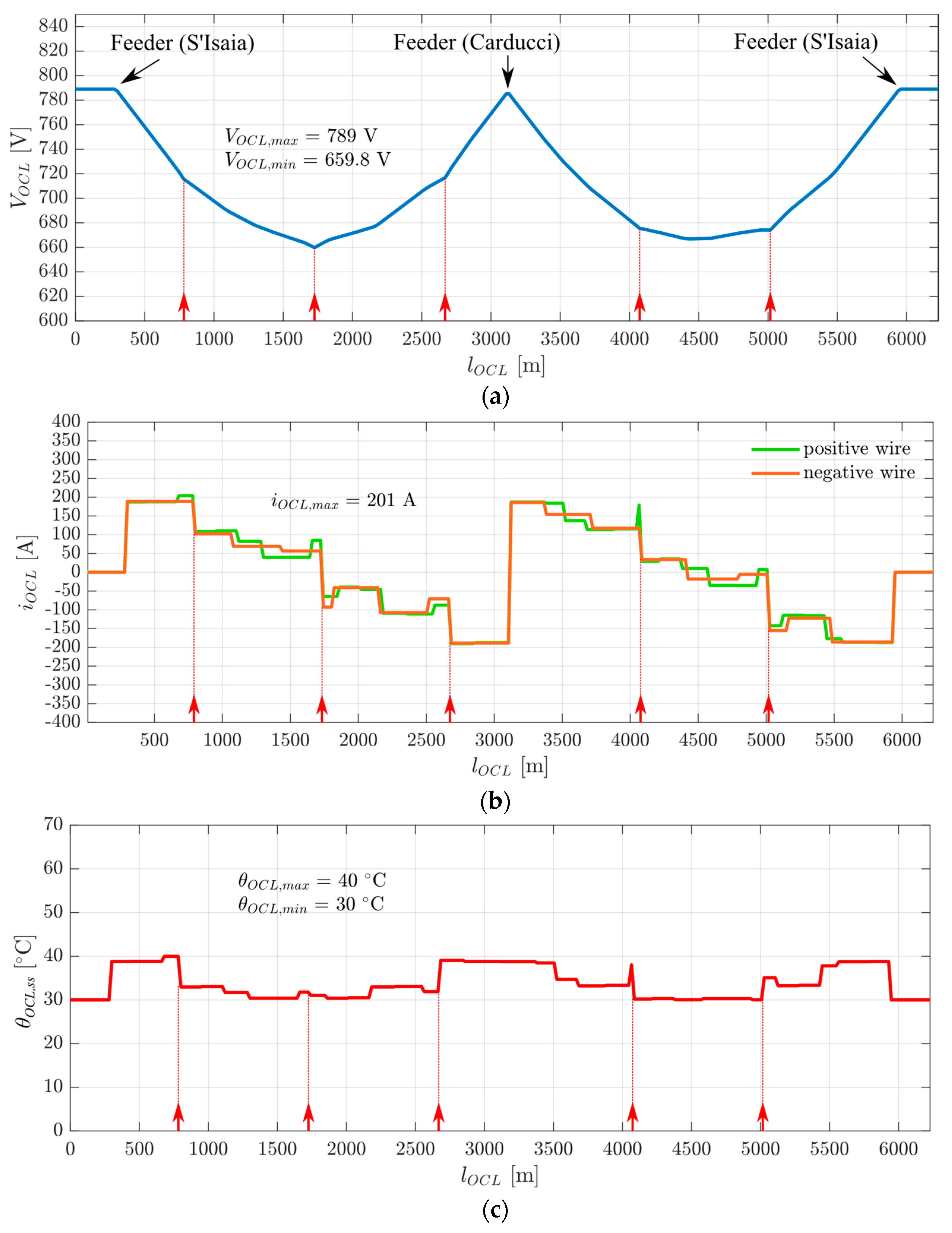
5.1. Feeding Section “Sant’Isaia-Carducci”
5.1.1. First Simulation Type: OCL Morphology Analysis of FS 1
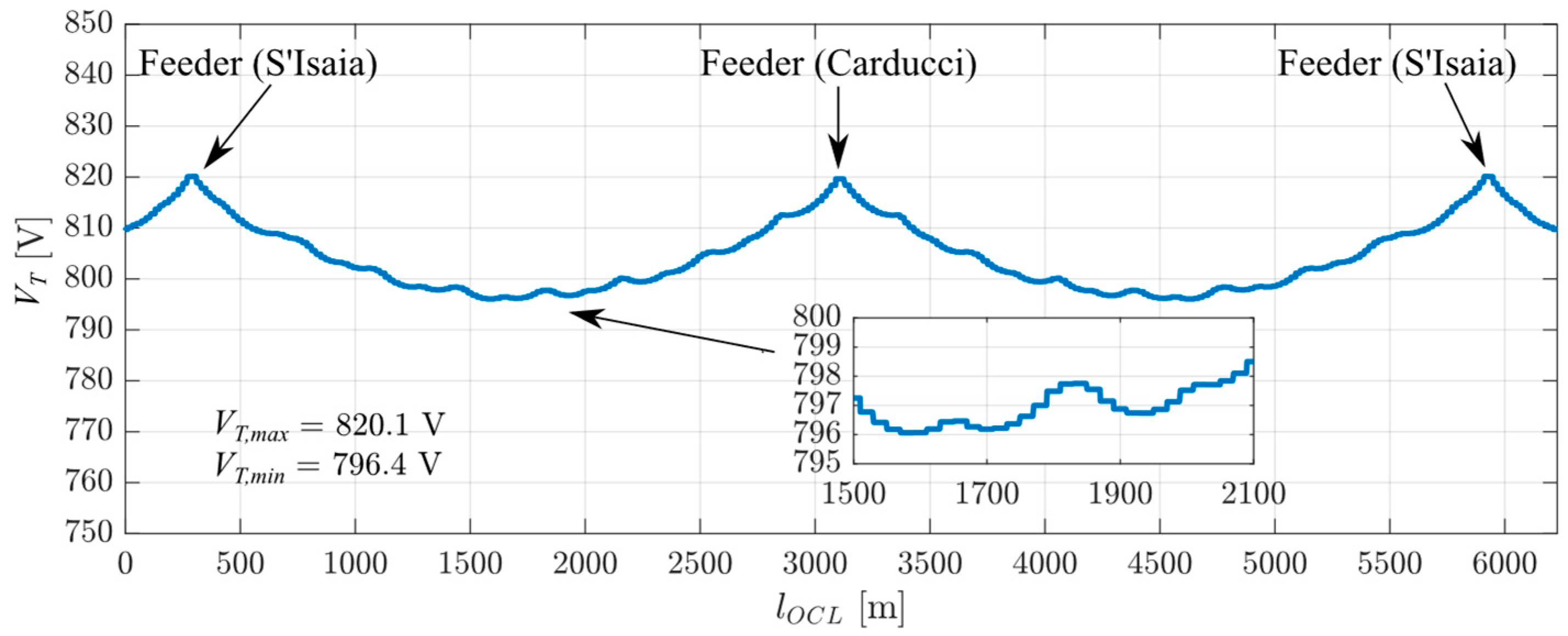
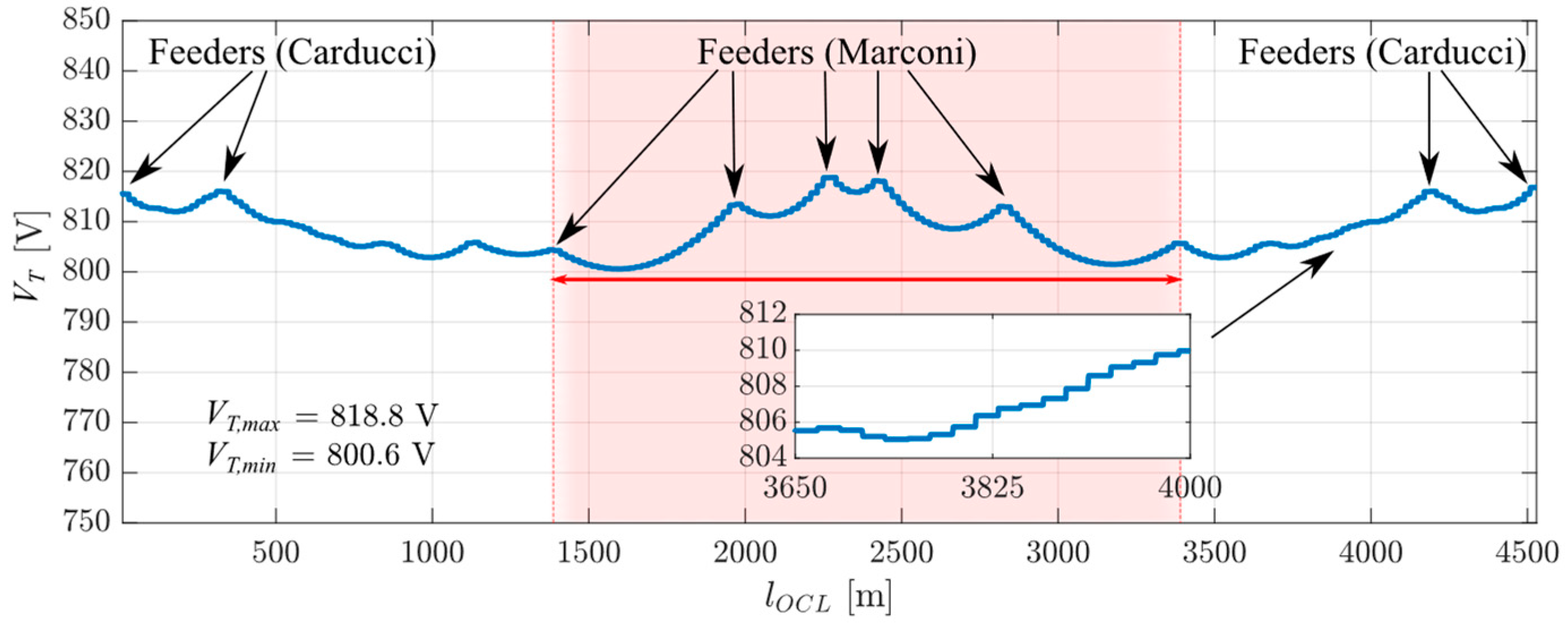
- A detail of the voltage trend emphasizes the 20-m spatial discretization;
- The horizontal axis coordinates of the voltage peaks correspond to the positions of the line feeders leaving from the TPSSs, as it should be. One may observe how the S’Isaia’s feeder connection point with the catenary was not in the exact extremity of the FS but slightly displaced towards the center;
- The voltage VT is characterized by a undulatory behavior, owing to the presence of the equipotential bonding system set across the double-bifilar line. The slight increase in voltage in correspondence of such equipotential connections is attributable to the reduction in the catenary electrical resistance. Moreover, the effect of the double-bifilar OCL was that the trolleybus movement along one of the bifilar lines affected the current distribution in its counterpart, and hence a sort of symmetry in the undulatory phenomenon exists between the left and right halves of the plot.
5.1.2. Second Simulation Type: Method Comparison for FS 1
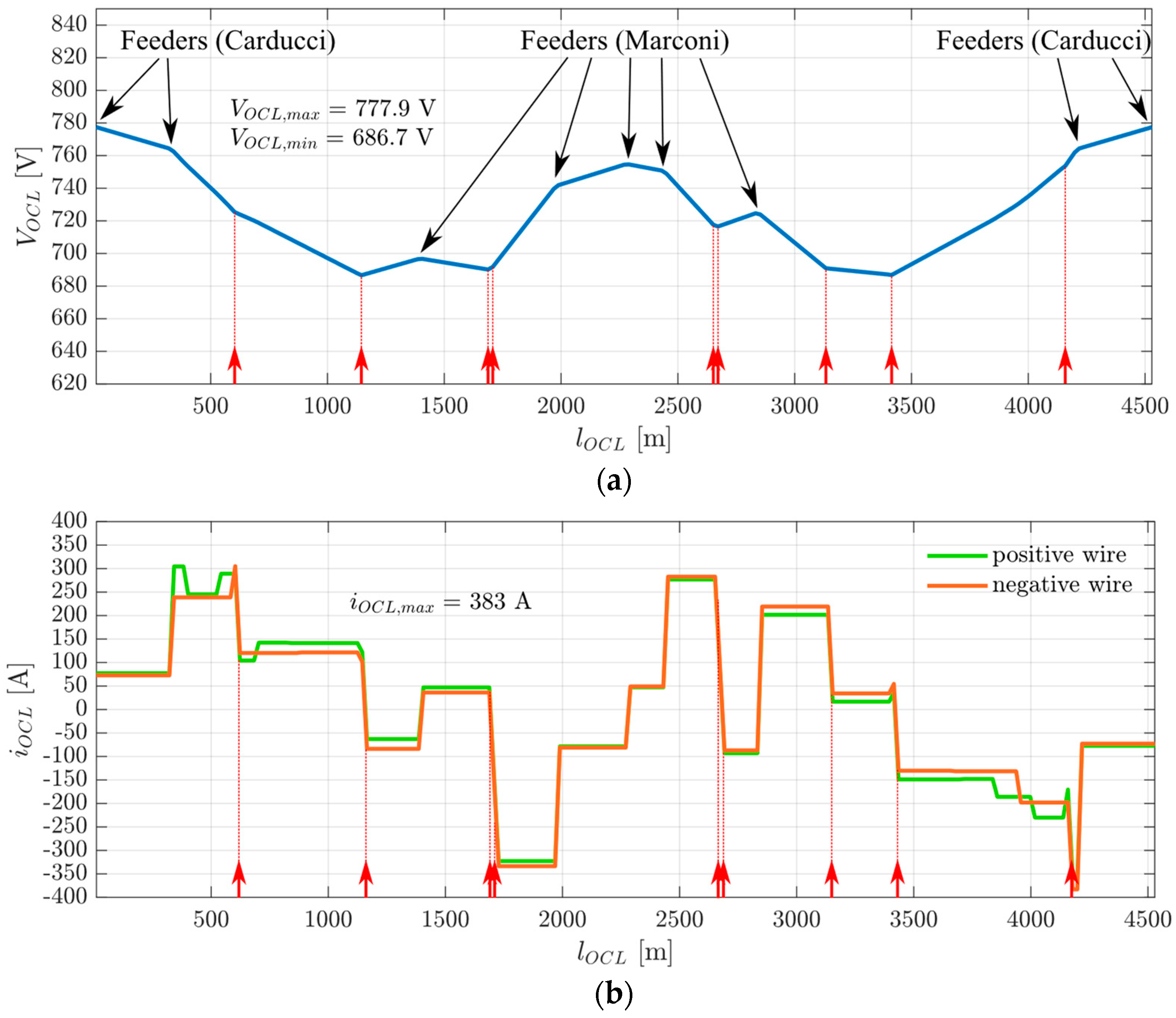
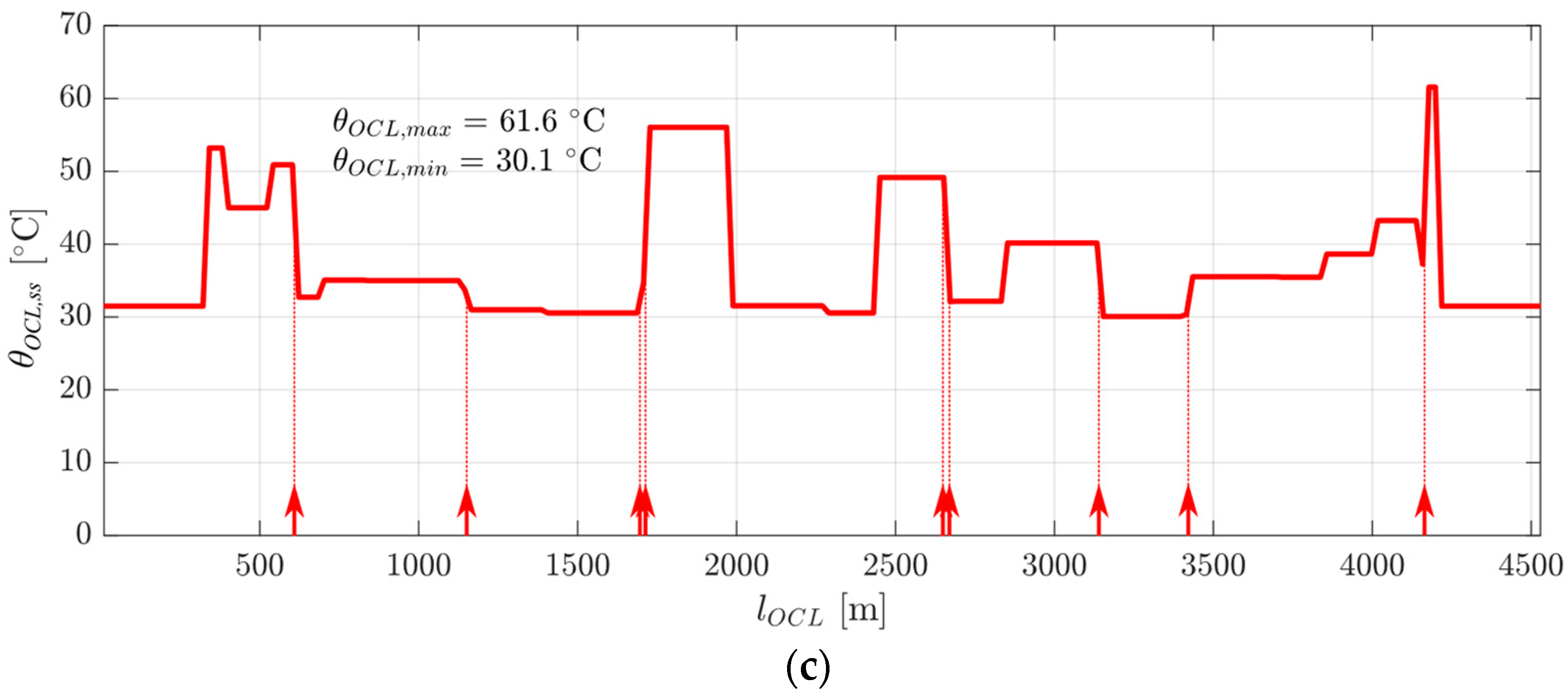
5.2. Feeding Section “Marconi-Carducci”
5.2.1. First Simulation Type: OCL Morphology Analysis of FS 2
- The voltage VT was characterized by an undulatory behavior towards the TPSS “Carducci” at the plot extremity, owing to the presence of the equipotential bonding system set across the double-bifilar line. A symmetry in the undulatory phenomenon existed between the left and right plot extremities;
- The single two-wire ring presence was marked by the larger valleys belonging to the line section highlighted in red. Within these areas, no voltage equalizers were found.
5.2.2. Second Simulation Type: Method Comparison for FS 2
6. Modeling Techniques Comparison
7. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Breuer, J.L.; Samsun, R.C.; Stolten, D.; Peters, R. How to reduce the greenhoue gas emissions and air pollution caused by light and heavy duty vehicles with battery-electric, fuel cell-electric and catenary trucks. Environ. Int. 2021, 152, 106474. [Google Scholar] [CrossRef] [PubMed]
- Ahmadi, M.; Jafari Kaleybar, H.; Brenna, M.; Castelli-Dezza, F.; Carmeli, M.S. Integration of Distributed Energy Resources and EV Fast-Charging Infrastructure in High-Speed Railway Systems. Electronics 2021, 10, 2555. [Google Scholar] [CrossRef]
- CENELEC. EN 50119 Railways Applications-Fixed Installations-Electric Traction Overhead Contact Lines; CENELEC: Brussels, Belgium, 2020. [Google Scholar]
- Perticaroli, F. Sistemi Elettrici per i Trasporti: Trazione Elettrica [Electrical Systems for Transportation: Electric Traction]; CEA: Milan, Italy, 2001. [Google Scholar]
- Mayer, L. Impianti Ferroviari: Tecnica ed Esercizio [Railway Installations: Technique and Exercise]; Collegio ingegneri ferroviari italiani: Rome, Italy, 1989. [Google Scholar]
- Capasso, A.; Lamedica, R.; Penna, C. Energy Regeneration In Transportation Systems—Methodologies For Power-Networks Simulation. In Control in Transportation Systems, Proceedings of the 4th IFAC/IFIP/IFORS Conference, Baden-Baden, Federal Republic of Germany, 20–22 April 1983; Elsevier: Amsterdam, The Netherlands; pp. 119–124.
- Adinolfi, A.; Lamedica, R.; Modesto, C.; Prudenzi, A.; Vimercati, S. Experimental assessment of energy saving due to trains regenerative braking in an electrified subway line. IEEE Trans. Power Deliv. 1998, 13, 1536–1541. [Google Scholar] [CrossRef]
- Lamedica, R.; Gatta, F.M.; Geri, A.; Sangiovanni, S.; Ruvio, A. A Software Validation for DC Electrified Transportation System: A Tram Line of Rome. In Proceedings of the 2018 IEEE International Conference on Environment and Electrical Engineering and 2018 IEEE Industrial and Commercial Power Systems Europe (EEEIC/I&CPS Europe), Palermo, Italy, 12–15 June 2018; pp. 1–6. [Google Scholar] [CrossRef]
- Capasso, A.; Lamedica, R.; Ruvio, A.; Ceraolo, M.; Lutzemberger, G. Modelling and simulation of electric urban transportation systems with energy storage. In Proceedings of the 2016 IEEE 16th International Conference on Environment and Electrical Engineering (EEEIC), Florence, Italy, 7–10 June 2016; pp. 1–5. [Google Scholar] [CrossRef]
- Capasso, A.; Ceraolo, M.; Lamedica, R.; Lutzemberger, G.; Ruvio, A. Modelling and simulation of tramway transportation systems. J. Adv. Transp. 2019, 2019, 4076865. [Google Scholar] [CrossRef] [Green Version]
- Alnuman, H.; Gladwin, D.; Foster, M. Electrical modelling of a DC railway system with multiple trains. Energies 2018, 11, 3211. [Google Scholar] [CrossRef] [Green Version]
- Mao, F.; Mao, Z.; Yu, K. The Modeling and Simulation of DC Traction Power Supply Network for Urban Rail Transit Based on Simulink. J. Phys. Conf. Ser. 2018, 1087, 042058. [Google Scholar] [CrossRef]
- Sirmelis, U. Direct connection of SC battery to traction substation. In Proceedings of the 2015 56th International Scientific Conference on Power and Electrical Engineering of Riga Technical University (RTUCON), Riga, Latvia, 14 October 2015; pp. 1–5. [Google Scholar] [CrossRef]
- Fan, F.; Stewart, B.G. Power Flow Simulation of DC Railway Power Supply Systems with Regenerative Braking. In Proceedings of the 2020 20th IEEE Mediterranean Electrotechnical Conference (MELECON), Palermo, Italy, 16–18 June 2020; pp. 87–92. [Google Scholar] [CrossRef]
- Stana, G.; Brazis, V. Trolleybus motion simulation by dealing with overhead DC network energy transmission losses. In Proceedings of the 2017 18th International Scientific Conference on Electric Power Engineering (EPE), Kouty nad Desnou, Czech Republic, 3 July 2017; pp. 1–6. [Google Scholar] [CrossRef]
- CENELEC. EN 50163 Railway Applications-Supply Voltages of Traction Systems; CENELEC: Brussels, Belgium, 2004. [Google Scholar]
- Rusck, S. The simultaneous demand in distribution network supplying domestic consumers. ASEA J. 1956, 10, 59–61. [Google Scholar]
- Dickert, J.; Schegner, P. Residential load models for network planning purposes. In Proceedings of the 2010 International Symposium on Modern Electric Power Systems (MEPS’10), Wroclaw, Poland, 20–22 September 2010; pp. 1–6. [Google Scholar]
- Sun, M.; Djapic, P.; Aunedi, M.; Pudjianto, D.; Strbac, G. Benefits of smart control of hybrid heat pumps: An analysis of field trial data. Appl. Energy 2019, 247, 525–536. [Google Scholar] [CrossRef]
- Du, W. Probabilistic analysis for capacity planning in Smart Grid at residential low voltage level by Monte-Carlo method. Procedia Eng. 2011, 23, 804–812. [Google Scholar] [CrossRef] [Green Version]
- Vergnes, H.; Nijhuis, M.; Coster, E. Using Stochastic Modelling for Long-Term Network Planning of LV Distribution Grids At Dutch DNO. In Proceedings of the 25th International Conference and Exhibition on Electricity Distribution CIRED, Madrid, Spain, 3–6 June 2019. [Google Scholar]
- Schick, C.; Klempp, N.; Hufendiek, K. Impact of network charge design in an energy system with large penetration of renewables and high prosumer shares. Energies 2021, 14, 6872. [Google Scholar] [CrossRef]
- Fürst, K.; Chen, P.; Gu, I.Y.H.; Tong, L. Improved peak load estimation from single and multiple consumer categories. In Proceedings of the CIRED 2020 Berlin Workshop, Online Conference, 22–23 September 2020; pp. 178–181. [Google Scholar] [CrossRef]
- MATLAB & Simulink. The MathWorks Inc. Subsystem Reference. Available online: https://www.mathworks.com/help/simulink/ug/referenced-subsystem-1.html (accessed on 5 September 2021).
- Ruffo, R.; Cirimele, V.; Guglielmi, P.; Khalilian, M. A coupled mechanical-electrical simulator for the operational requirements estimation in a dynamic IPT system for electric vehicles. In Proceedings of the 2016 IEEE Wireless Power Transfer Conference (WPTC), Aveiro, Portugal, 5–6 May 2016; pp. 1–4. [Google Scholar] [CrossRef]
- Google Maps (n.d.) Bologna, IT. Available online: http://shorturl.at/pvFHZ (accessed on 7 October 2021).
- Baghramian, A.; Forsyth, A.J. Averaged-value models of twelve-pulse rectifiers for aerospace applications. In Proceedings of the Second International Conference on Power Electronics, Machines and Drives (PEMD), Edinburgh, UK, 31 March–2 April 2004; Volume 1, pp. 220–225. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| OCL Pole Current | OCL Structure | ||
|---|---|---|---|
| Single-Bifilar | Double-Bifilar | ||
| Power supply configuration | Unilateral | IM | IM/2 |
| Bilateral | IM/2 | IM/4 | |
| Label | Description | Parameters |
|---|---|---|
| ROCL,hs | OCL half-span (10 m) pole resistance | 2.475 (mΩ) |
| SOCL | OCL nominal cross-section | 100 (mm2) |
| C | OCL heat constant | 2.5 (°C mm4/A2) |
| τth | OCL thermal time constant | 600 (s) |
| θOCL,0 | OCL initial temperature | 30 (°C) |
| Label | Description | Parameters |
|---|---|---|
| rF,1S | TPSS “S’Isaia” feeder pole resistance per unit length | 0.0250 mΩ/m |
| rF,1C | TPSS “Carducci” feeder pole resistance per unit length | 0.0250 mΩ/m |
| Label | Description | Conventional Method Parameters | MVMB Model Parameters |
|---|---|---|---|
| VOCL,max | OCL maximum voltage | 750 V | 789 V |
| VOCL,min | OCL minimum voltage | 613 V | 659.8 V |
| ΔVOCL | OCL voltage variation (VOCL,max − VOCL,min) | 137 V | 129.2 V |
| ΔVtot | Total voltage variation (Vth − VOCL,min) | 137 V | 170.8 V |
| IOCL | OCL positive-pole maximum current | 187.5 A | 201 A |
| θOCL,ss | OCL positive-pole maximum steady state temperature | 39 °C | 40 °C |
| Label | Description | Parameters |
|---|---|---|
| rF,2M | TPSS “Marconi” feeder pole resistance per unit length | 0.0188 mΩ/m |
| rRF1,2M | TPSS “Marconi” reinforcing feeder 1 pole resistance per unit length | 0.0601 mΩ/m |
| rRF2,2M | TPSS “Marconi” reinforcing feeder 2 pole resistance per unit length | 0.2338 mΩ/m |
| rF,2C | TPSS “Carducci” feeder pole resistance per unit length | 0.0150 mΩ/m |
| rRF,2C | TPSS “Carducci” reinforcing feeder pole resistance per unit length | 0.0375 mΩ/m |
| Label | Description | Conventional Method Parameters | MVMB Model Parameters |
|---|---|---|---|
| VOCL,max | OCL maximum voltage | 750 V | 777.9 V |
| VOCL,min | OCL minimum voltage | 603 V | 686.7 V |
| ΔVOCL | OCL voltage variation (VOCL,max − VOCL,min) | 147 V | 91.2 V |
| ΔVtot | Total voltage variation (Vth − VOCL,min) | 147 V | 143.3 V |
| IOCL | OCL positive-pole maximum current | 416 A | 383 A |
| θOCL,ss | OCL positive-pole maximum steady state temperature | 73 °C | 61.6 °C |
| Modeling Features | ||||
|---|---|---|---|---|
| Variable Number of Vehicles | Complex FS Morphology | User-Friendliness | ||
| Modeling methods | Conventional analytical approach | ✓ | ✕ | ✕ |
| Train-sim | ✓ | ✓ | ✕ | |
| Variable resistor imitation | ✕ | ✕ | ✓ | |
| MVMB model | ✓ | ✓ | ✓ | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Barbone, R.; Mandrioli, R.; Ricco, M.; Paternost, R.F.; Cirimele, V.; Grandi, G. Novel Multi-Vehicle Motion-Based Model of Trolleybus Grids towards Smarter Urban Mobility. Electronics 2022, 11, 915. https://doi.org/10.3390/electronics11060915
Barbone R, Mandrioli R, Ricco M, Paternost RF, Cirimele V, Grandi G. Novel Multi-Vehicle Motion-Based Model of Trolleybus Grids towards Smarter Urban Mobility. Electronics. 2022; 11(6):915. https://doi.org/10.3390/electronics11060915
Chicago/Turabian StyleBarbone, Riccardo, Riccardo Mandrioli, Mattia Ricco, Rudolf Francesco Paternost, Vincenzo Cirimele, and Gabriele Grandi. 2022. "Novel Multi-Vehicle Motion-Based Model of Trolleybus Grids towards Smarter Urban Mobility" Electronics 11, no. 6: 915. https://doi.org/10.3390/electronics11060915
APA StyleBarbone, R., Mandrioli, R., Ricco, M., Paternost, R. F., Cirimele, V., & Grandi, G. (2022). Novel Multi-Vehicle Motion-Based Model of Trolleybus Grids towards Smarter Urban Mobility. Electronics, 11(6), 915. https://doi.org/10.3390/electronics11060915