
Constant Power Load Stabilization in DC Microgrids Using Continuous-Time Model Predictive Control

 ,
,
Abstract
:1. Introduction
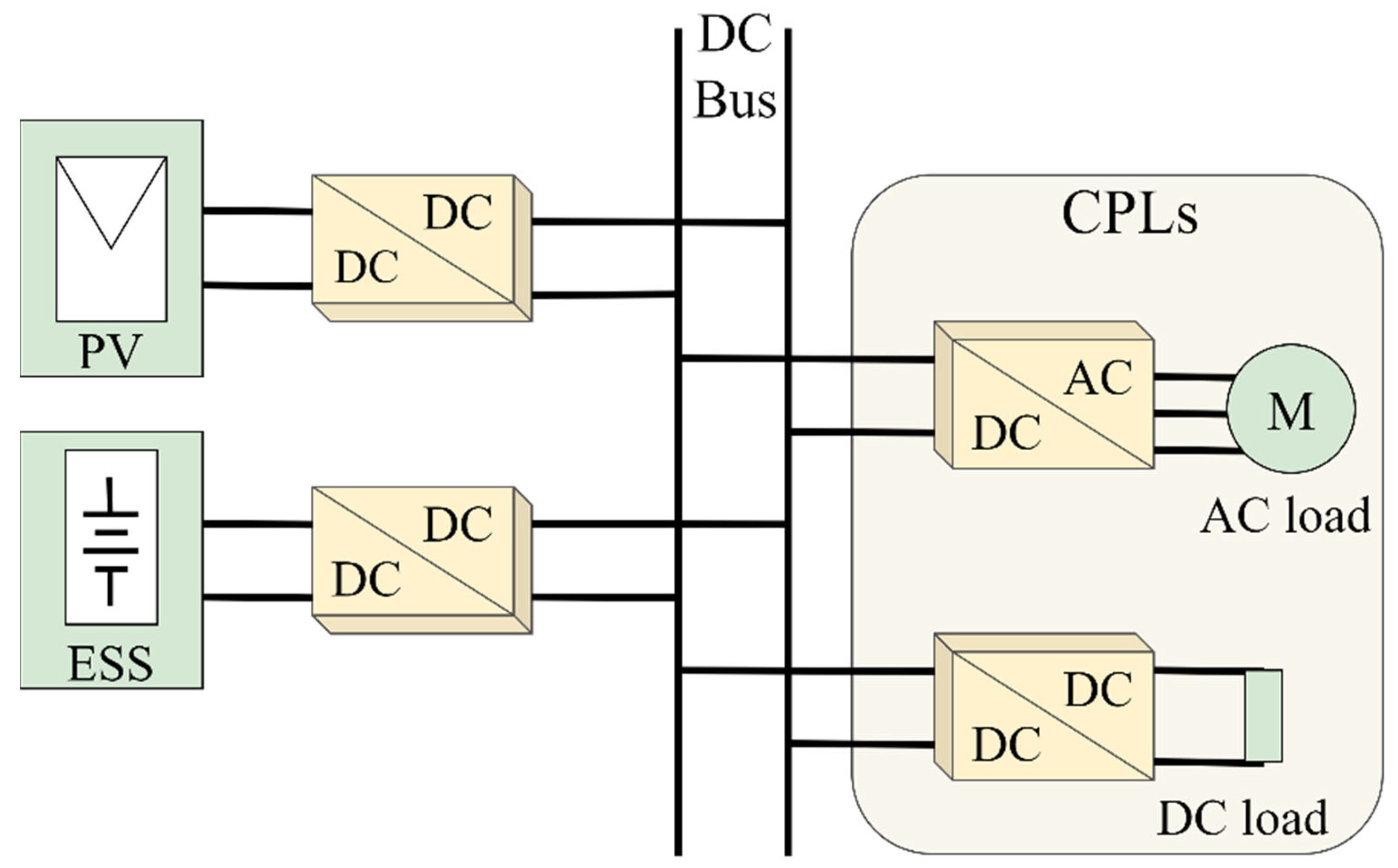
- A complete modeling of a typical DC microgrid consisting of a PV array and a battery feeding a CPL.
- Mitigation of the instability issue caused by CPL using a continuous-time MPC, which ensures accurate tracking and large signal stability.
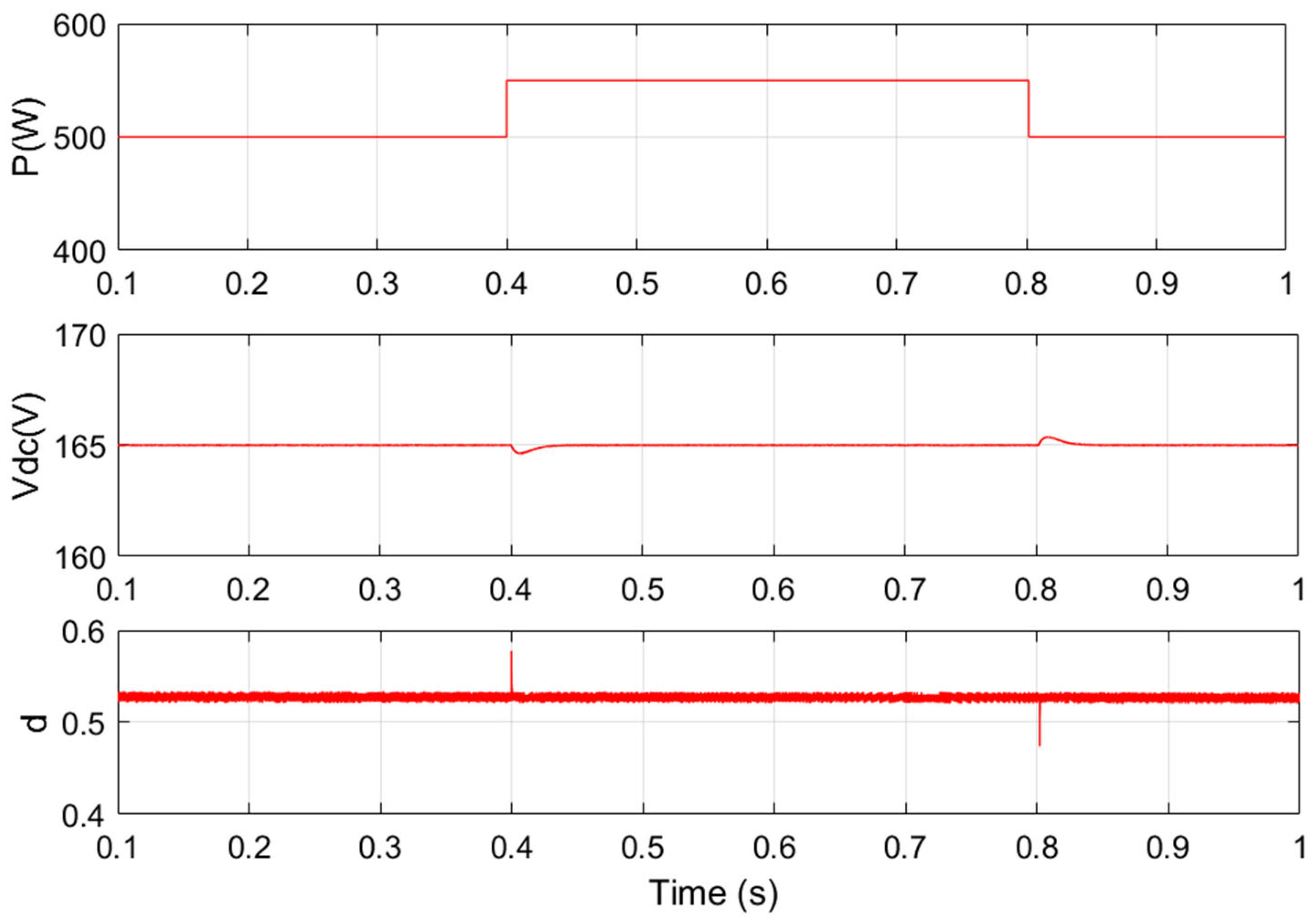
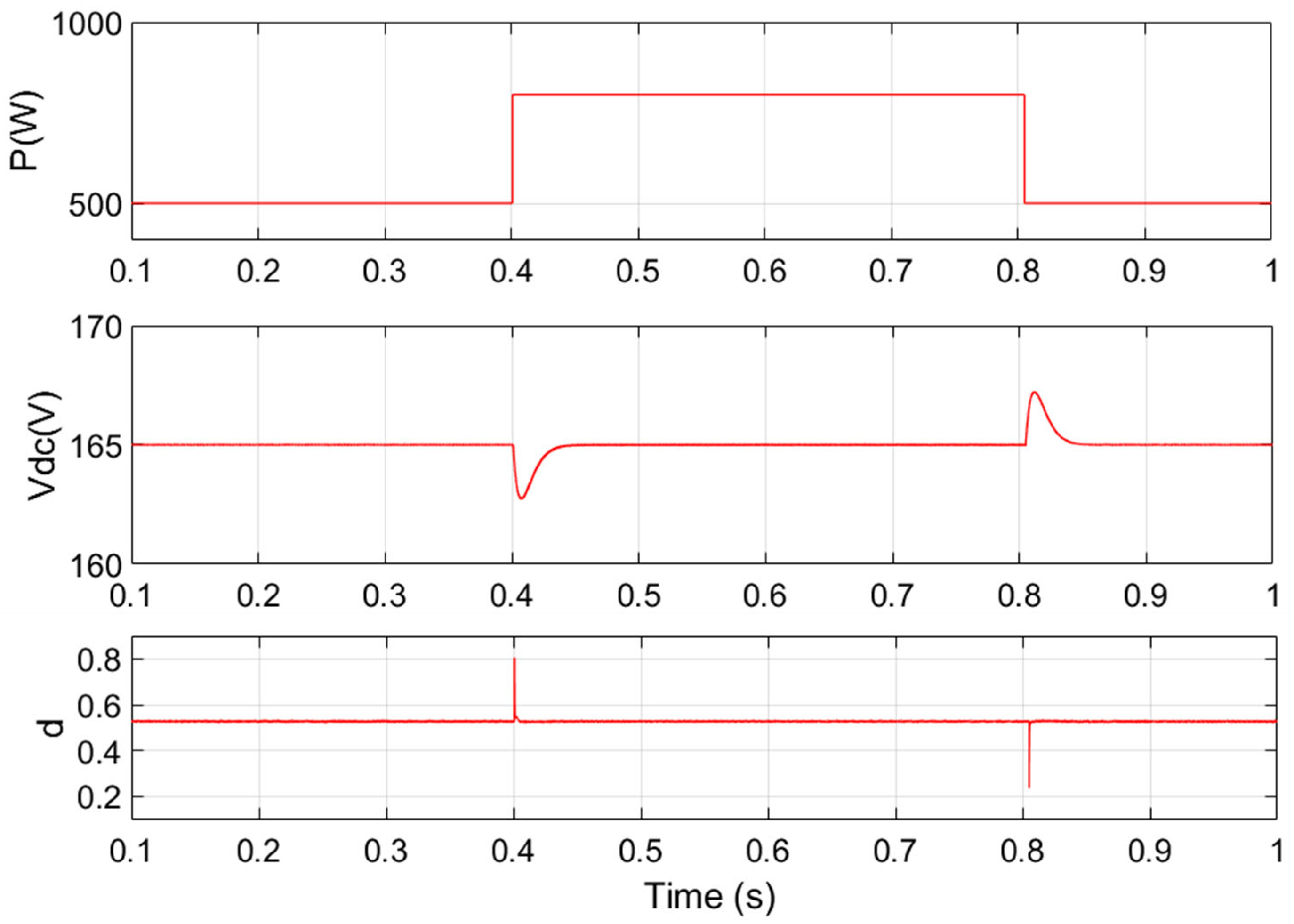
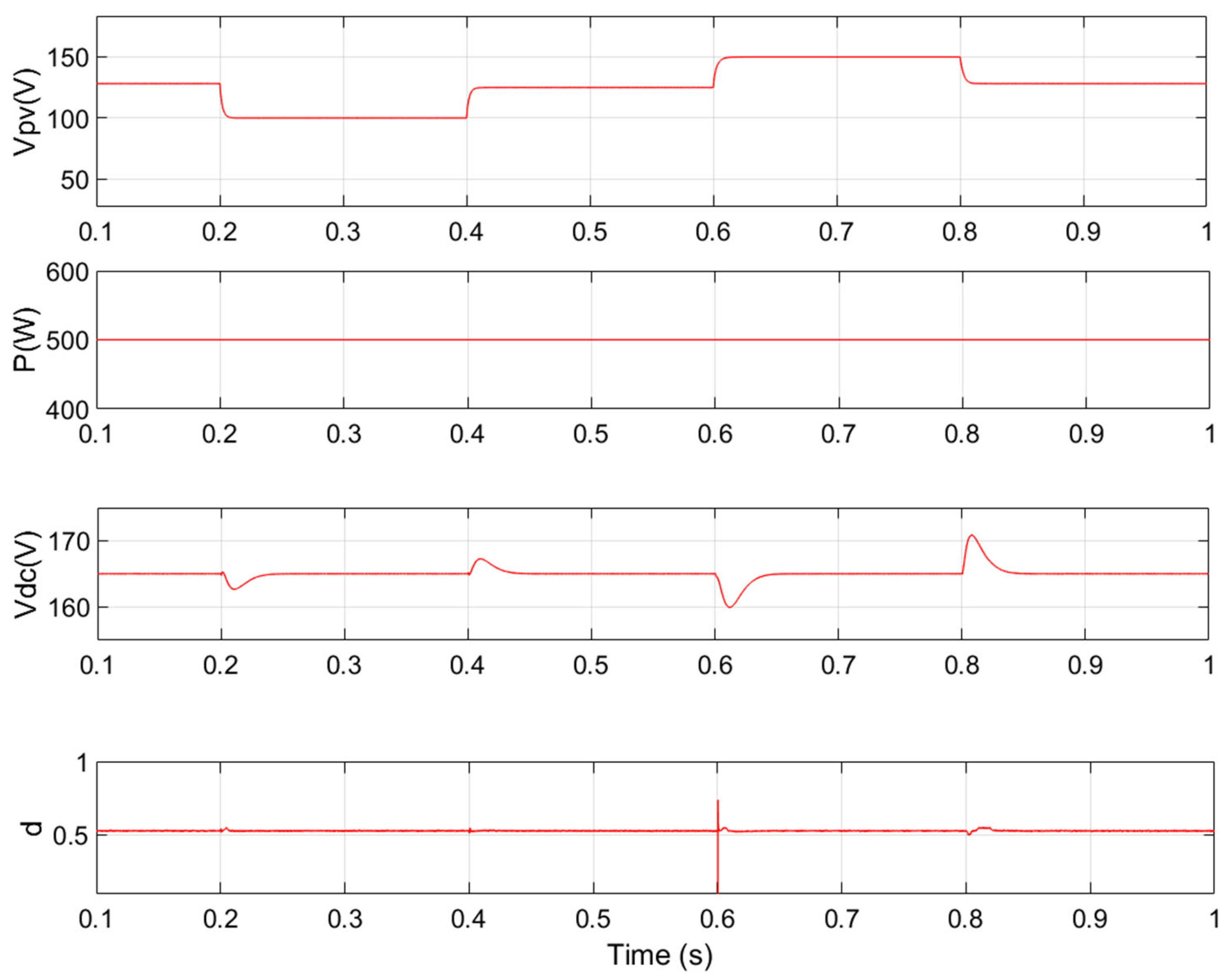
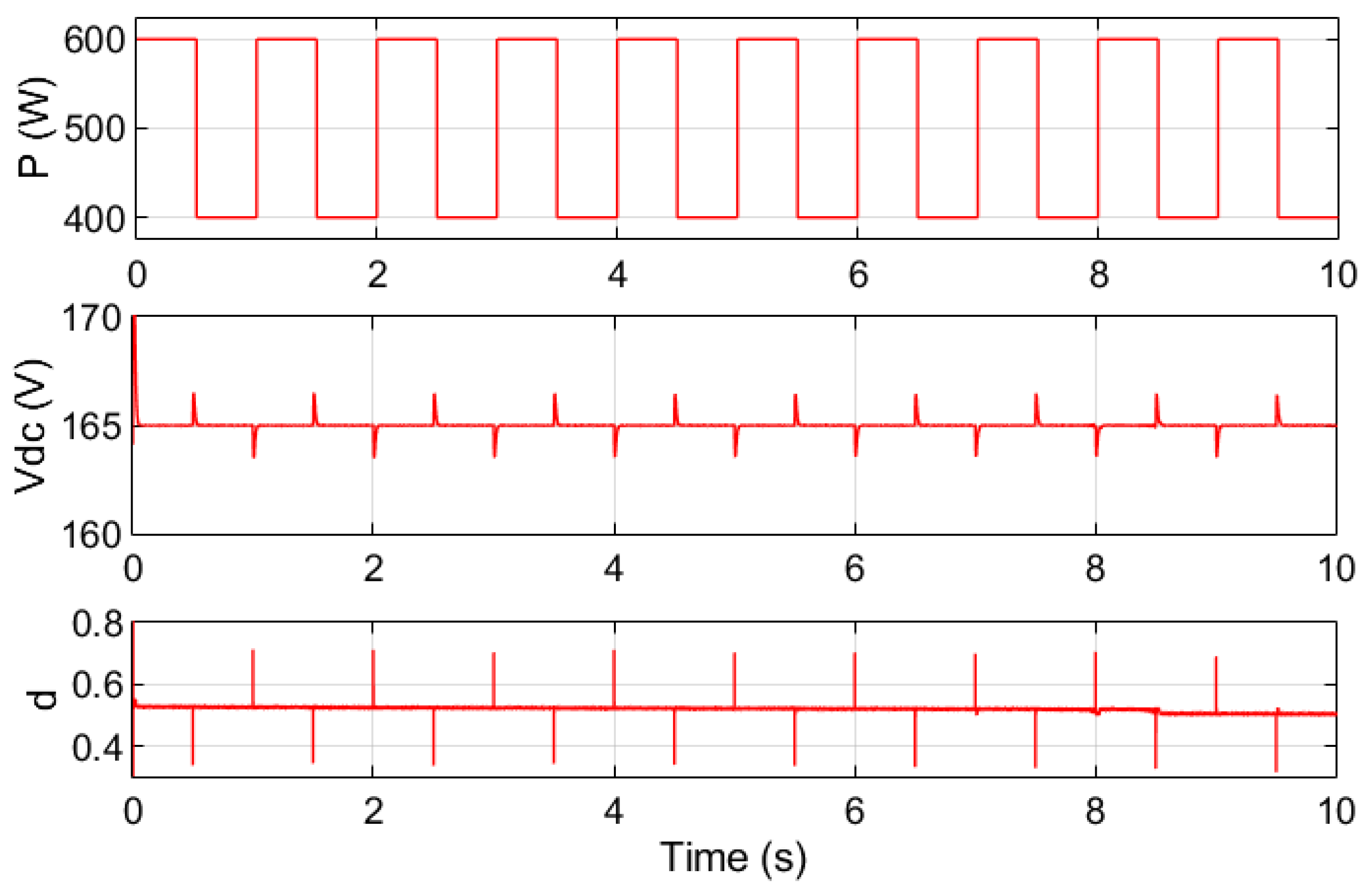
- Extensive simulations were conducted to investigate the influence of CPL on DC microgrid stability following four scenarios—small CPL power variation, large CPL variation, PV power variation, and square wave variation of the CPL.
2. Problem Formulation and System Modeling
2.1. Problem Formulation
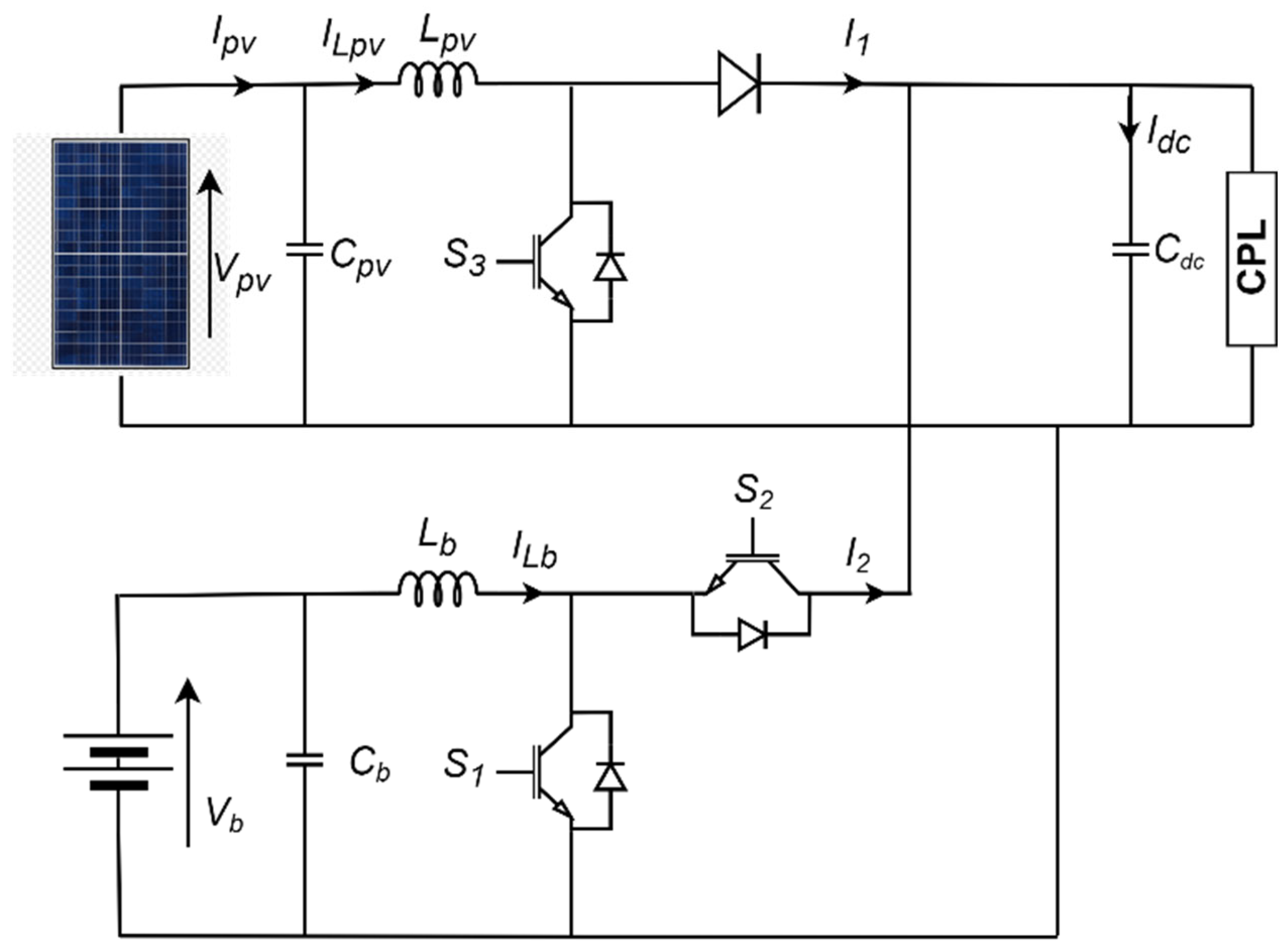
2.2. System Modeling
2.2.1. PV Modeling
2.2.2. Battery Modeling
2.2.3. Power Converters Modeling
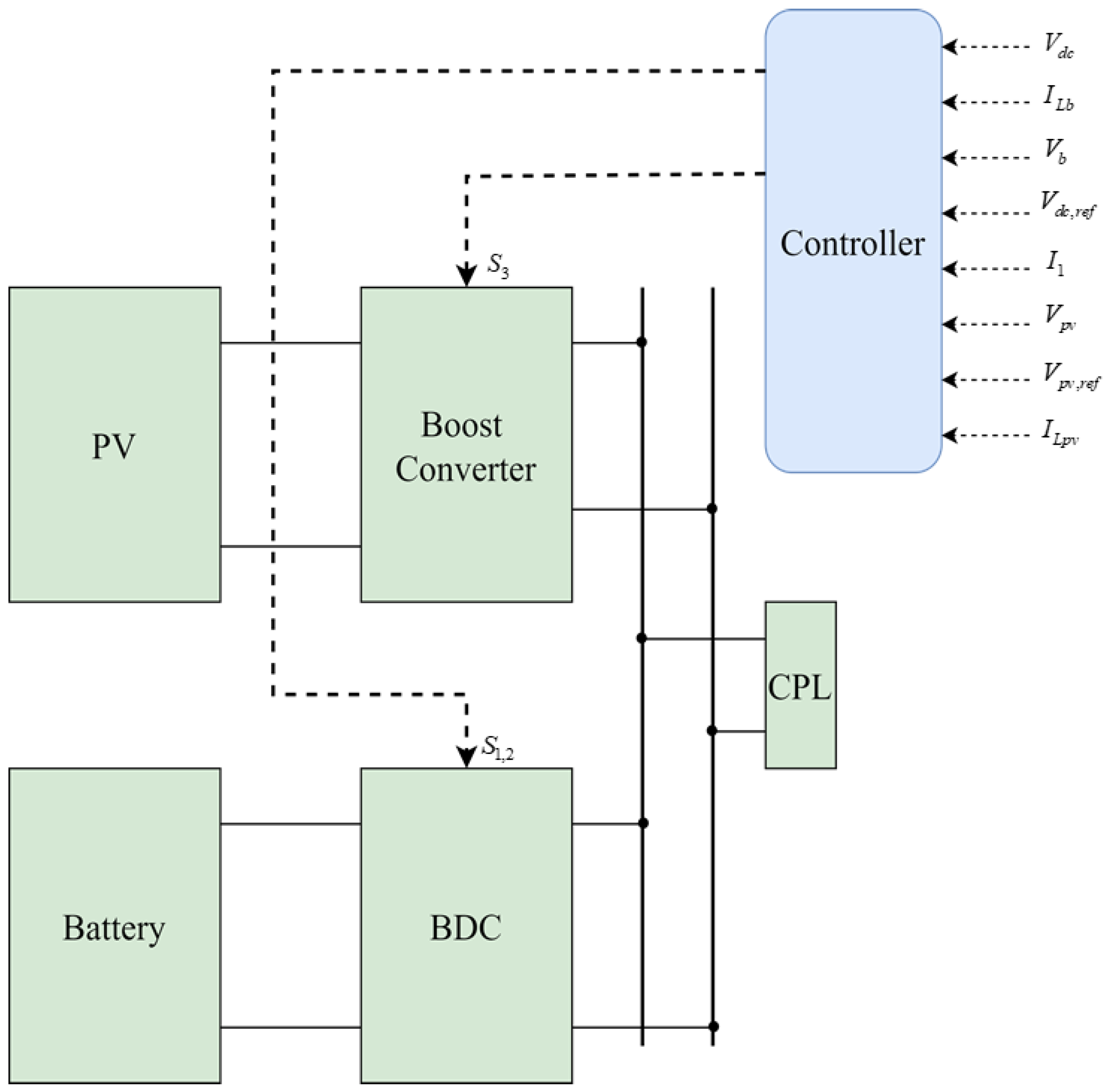
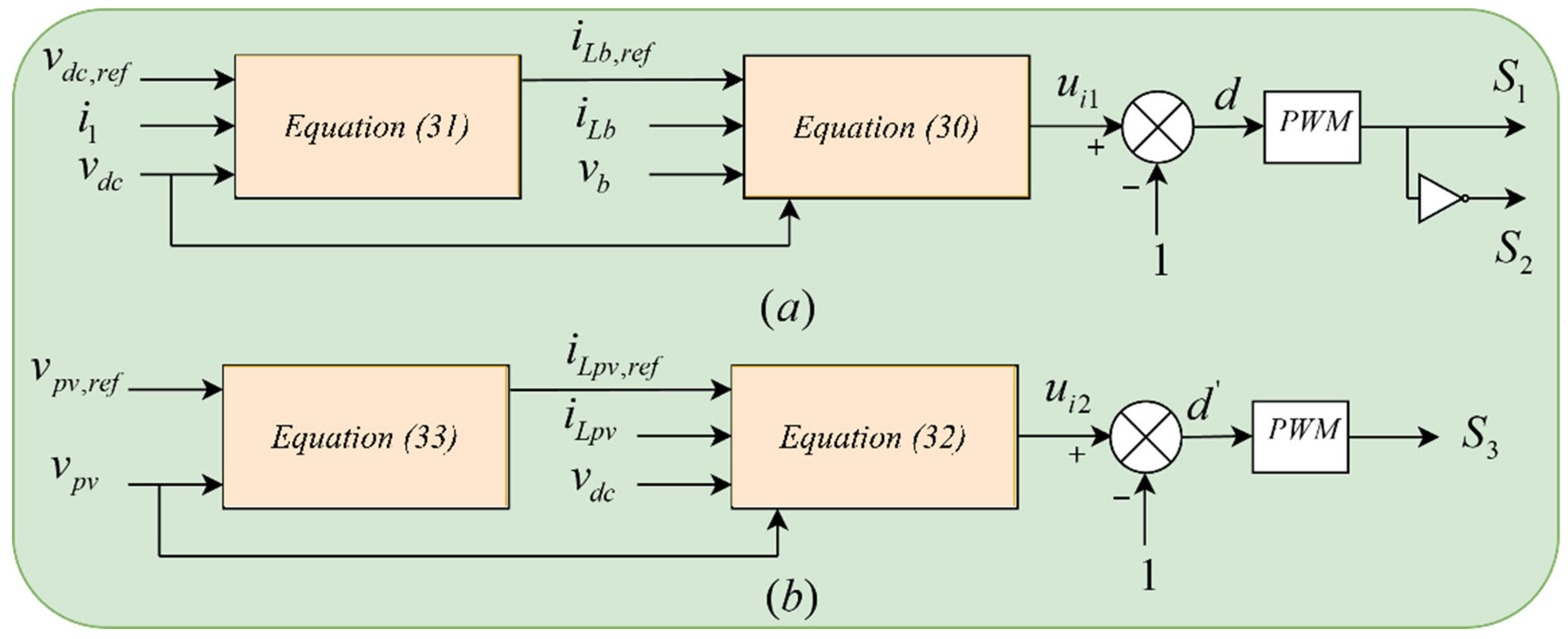
3. Controller Design
3.1. MPC Controller
3.2. Disturbance Observer
3.3. Application to DC–DC Power Converters
4. Simulation Results
5. Summary and Discussion
6. Conclusions and Perspectives
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Bazilian, M.; Onyeji, I.; Liebreich, M.; MacGill, I.; Chase, J.; Shah, J.; Gielen, D.; Arent, D.; Landfear, D.; Zhengrong, S. Re-considering the economics of photovoltaic power. Renew. Energy 2013, 53, 329–338. [Google Scholar] [CrossRef]
- Bialasiewicz, J.T. Renewable energy systems with photovoltaic power generators: Operation and modeling. IEEE Trans. Ind. Electron. 2008, 55, 2752–2758. [Google Scholar] [CrossRef]
- Mahmood, H.; Michaelson, D.; Jiang, J. Strategies for Independent Deployment and Autonomous Control of PV and Battery Units in Islanded Microgrids. IEEE J. Emerg. Sel. Top. Power Electron. 2015, 3, 742–755. [Google Scholar] [CrossRef]
- NaitMalek, Y.; Najib, M.; Bakhouya, M.; Essaaidi, M. Embedded Real-time Battery State-of-Charge Forecasting in Micro-Grid Systems. Ecol. Complex. 2021, 45, 100903. [Google Scholar] [CrossRef]
- Boulmrharj, S.; Ouladsine, R.; NaitMalek, Y.; Bakhouya, M.; Zine-dine, K.; Khaidar, M.; Siniti, M. Online battery state-of-charge estimation methods in micro-grid systems. J. Energy Storage 2020, 30, 101518. [Google Scholar] [CrossRef]
- Boulmrharj, S.; Khaidar, M.; Bakhouya, M.; Ouladsine, R.; Siniti, M.; Zine-dine, K. Performance assessment of a hybrid system with hydrogen storage and fuel cell for cogeneration in buildings. Sustainability 2020, 12, 4832. [Google Scholar] [CrossRef]
- Kaur, R.; Krishnasamy, V.; Kandasamy, N.K. Optimal sizing of wind–PV-based DC microgrid for telecom power supply in remote areas. IET Renew. Power Gener. 2018, 12, 859–866. [Google Scholar] [CrossRef]
- Mahmood, H.; Michaelson, D.; Jiang, J. A power management strategy for PV/battery hybrid systems in Islanded microgrids. IEEE J. Emerg. Sel. Top. Power Electron. 2014, 2, 870–882. [Google Scholar] [CrossRef]
- Alidrissi, Y.; Ouladsine, R.; Elmouatamid, A.; Bakhouya, M. An Energy Management Strategy for DC Microgrids with PV/Battery Systems. J. Electr. Eng. Technol. 2021, 16, 1285–1296. [Google Scholar] [CrossRef]
- Kumar, V.; Ghosh, S.; Naidu, N.K.S.; Kamal, S.; Saket, R.K.; Nagar, S.K. Load voltage-based MPPT technique for standalone PV systems using adaptive step. Int. J. Electr. Power Energy Syst. 2021, 128, 106732. [Google Scholar] [CrossRef]
- Kumar, N.; Hussain, I.; Singh, B.; Panigrahi, B.K. Rapid MPPT for Uniformly and Partial Shaded PV System by Using JayaDE Algorithm in Highly Fluctuating Atmospheric Conditions. IEEE Trans. Ind. Inform. 2017, 13, 2406–2416. [Google Scholar] [CrossRef]
- Mohanty, S.; Subudhi, B.; Ray, P.K. A Grey Wolf-Assisted Perturb & Observe MPPT Algorithm for a PV System. IEEE Trans. Energy Convers. 2017, 32, 340–347. [Google Scholar] [CrossRef]
- Emara, D.; Ezzat, M.; Abdelaziz, A.Y.; Mahmoud, K.; Lehtonen, M.; Darwish, M.M.F. Novel control strategy for enhancing microgrid operation connected to photovoltaic generation and energy storage systems. Electronics 2021, 10, 1261. [Google Scholar] [CrossRef]
- Ali, M.N.; Mahmoud, K.; Lehtonen, M.; Darwish, M.M.F. Promising mppt methods combining metaheuristic, fuzzy-logic and ann techniques for grid-connected photovoltaic. Sensors 2021, 21, 1244. [Google Scholar] [CrossRef] [PubMed]
- Kotra, S.; Mishra, M.K. Design and stability analysis of DC microgrid with hybrid energy storage system. IEEE Trans. Sustain. Energy 2019, 10, 1603–1612. [Google Scholar] [CrossRef]
- Magaldi, G.L.; Serra, F.M.; de Angelo, C.H.; Montoya, O.D.; Giral-Ramírez, D.A. Voltage regulation of an isolated dc microgrid with a constant power load: A passivity-based control design. Electronics 2021, 10, 2085. [Google Scholar] [CrossRef]
- Reddy, S.S. Optimal power flow with renewable energy resources including storage. Electr. Eng. 2017, 99, 685–695. [Google Scholar] [CrossRef]
- Elmouatamid, A.; NaitMalek, Y.; Bakhouya, M.; Ouladsine, R.; Elkamoun, N.; Zine-Dine, K.; Khaidar, M. An energy management platform for micro-grid systems using Internet of Things and Big-data technologies. Proc. Inst. Mech. Eng. Part I J. Syst. Control Eng. 2019, 233, 904–917. [Google Scholar] [CrossRef]
- Elmouatamid, A.; Ouladsine, R.; Bakhouya, M.; El Kamoun, N.; Khaidar, M.; Zine-Dine, K. Review of control and energy management approaches in micro-grid systems. Energies 2021, 14, 168. [Google Scholar] [CrossRef]
- Elmouatamid, A.; Ouladsine, R.; Bakhouya, M.; El Kamoun, N.; Zine-Dine, K. A predictive control strategy for energy management in micro-grid systems. Electronics 2021, 10, 1666. [Google Scholar] [CrossRef]
- Agarwal, A.; Deekshitha, K.; Singh, S.; Fulwani, D. Sliding mode control of a bidirectional DC/DC converter with constant power load. In Proceedings of the 2015 IEEE 1st International Conference on DC Microgrids (ICDCM), Atlanta, GA, USA, 7–10 June 2015; pp. 287–292. [Google Scholar] [CrossRef]
- Xu, Q.; Vafamand, N.; Chen, L.; Dragicevic, T.; Xie, L.; Blaabjerg, F. Review on Advanced Control Technologies for Bidirectional DC/DC Converters in DC Microgrids. IEEE J. Emerg. Sel. Top. Power Electron. 2021, 9, 1205–1221. [Google Scholar] [CrossRef]
- AL-Nussairi, M.K.; Bayindir, R.; Padmanaban, S.; Mihet-Popa, L.; Siano, P. Constant power loads (CPL) with Microgrids: Problem definition, stability analysis and compensation techniques. Energies 2017, 10, 1656. [Google Scholar] [CrossRef]
- Sun, J.; Lin, W.; Hong, M.; Loparo, K.A. Voltage Regulation of DC-Microgrid with PV and Battery. IEEE Trans. Smart Grid 2020, 11, 4662–4675. [Google Scholar] [CrossRef]
- Cespedes, M.; Xing, L.; Sun, J. Constant-power load system stabilization by passive damping. IEEE Trans. Power Electron. 2011, 26, 1832–1836. [Google Scholar] [CrossRef]
- Ashourloo, M.; Khorsandi, A.; Mokhtari, H. Stabilization of DC microgrids with constant-power loads by an active damping method. In Proceedings of the PEDSTC 2013—4th Annual International Power Electronics, Drive Systems and Technologies Conference, Tehran, Iran, 13–14 February 2013; pp. 471–475. [Google Scholar] [CrossRef]
- Pakdeeto, J.; Areerak, K.; Bozhko, S.; Areerak, K. Stabilization of DC MicroGrid Systems Using the Loop-Cancellation Technique. IEEE J. Emerg. Sel. Top. Power Electron. 2021, 9, 2652–2663. [Google Scholar] [CrossRef]
- Singh, S.; Kumar, V.; Fulwani, D. Mitigation of destabilising effect of CPLs in island DC micro-grid using non-linear control. IET Power Electron. 2017, 10, 387–397. [Google Scholar] [CrossRef]
- Xu, Q.; Zhang, C.; Wen, C.; Wang, P. A Novel Composite Nonlinear Controller for Stabilization of Constant Power Load in DC Microgrid. IEEE Trans. Smart Grid 2017, 10, 752–761. [Google Scholar] [CrossRef]
- Xu, Q.; Blaabjerg, F.; Zhang, C.; Yang, J.; Li, S.; Xiao, J. An Offset-free Model Predictive Controller for DC/DC Boost Converter Feeding Constant Power Loads in DC Microgrids. In Proceedings of the IECON 2019—45th Annual Conference of the IEEE Industrial Electronics Society, Lisbon, Portugal, 14–17 October 2019; pp. 4045–4049. [Google Scholar] [CrossRef]
- Vafamand, N.; Yousefizadeh, S.; Khooban, M.H.; Bendtsen, J.D.; Dragičević, T. Adaptive TS Fuzzy-Based MPC for DC Microgrids with Dynamic CPLs: Nonlinear Power Observer Approach. IEEE Syst. J. 2019, 13, 3203–3210. [Google Scholar] [CrossRef] [Green Version]
- Andres-Martinez, O.; Flores-Tlacuahuac, A.; Ruiz-Martinez, O.F.; Mayo-Maldonado, J.C. Nonlinear Model Predictive Stabilization of DC-DC Boost Converters with Constant Power Loads. IEEE J. Emerg. Sel. Top. Power Electron. 2021, 9, 822–830. [Google Scholar] [CrossRef]
- Errouissi, R.; Al-Durra, A.; Muyeen, S.M. A Robust Continuous-Time MPC of a DC-DC Boost Converter Interfaced with a Grid-Connected Photovoltaic System. IEEE J. Photovolt. 2016, 6, 1619–1629. [Google Scholar] [CrossRef] [Green Version]
- Kwasinski, A. Stability analysis and stabilization of DC microgrids. In DC Distribution Systems and Microgrids; Institution of Engineering and Technology: London, UK, 2016; pp. 43–61. [Google Scholar]
- El Mouatamid, A.; Ouladsine, R.; Bakhouya, M.; Felix, V.; Elkamoun, N.; Zine-Dine, K.; Khaidar, M.; Abid, R. Modeling and Performance Evaluation of Photovoltaic Systems. In Proceedings of the 2017 International Renewable and Sustainable Energy Conference IRSEC 2017, Tangier, Morocco, 4–7 December 2017; pp. 1–7. [Google Scholar] [CrossRef]
- Tremblay, O.; Dessaint, L.A. Experimental validation of a battery dynamic model for EV applications. In Proceedings of the 24th International Battery, Hybrid and Fuel Cell Electric Vehicle Symposium & Exhibition 2009: (EVS 24), Stavanger, Norway, 13–16 May 2009; Volume 2, pp. 930–939. [Google Scholar]
- Yang, J.; Zheng, W.X. Offset-free nonlinear MPC for mismatched disturbance attenuation with application to a static var compensator. IEEE Trans. Circuits Syst. II Express Briefs 2014, 61, 49–53. [Google Scholar] [CrossRef]
- Yang, J.; Zheng, W.X.; Li, S.; Wu, B.; Cheng, M. Design of a prediction-accuracy-enhanced continuous-time MPC for disturbed systems via a disturbance observer. IEEE Trans. Ind. Electron. 2015, 62, 5807–5816. [Google Scholar] [CrossRef]
- Xu, Q.; Yan, Y.; Zhang, C.; Dragicevic, T.; Blaabjerg, F. An Offset-Free Composite Model Predictive Control Strategy for DC/DC Buck Converter Feeding Constant Power Loads. IEEE Trans. Power Electron. 2020, 35, 5331–5342. [Google Scholar] [CrossRef]
- Wallscheid, O.; Ngoumtsa, E.F.B. Investigation of Disturbance Observers for Model Predictive Current Control in Electric Drives. IEEE Trans. Power Electron. 2020, 35, 13563–13572. [Google Scholar] [CrossRef]
- He, W.; Li, S.; Yang, J.; Wang, Z. Incremental passivity based control for DC-DC boost converter with circuit parameter perturbations using nonlinear disturbance observer. In Proceedings of the IECON 2016—42nd Annual Conference of the IEEE Industrial Electronics Society, Florence, Italy, 24–27 October 2016; pp. 1353–1358. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Description | Parameter | Value |
|---|---|---|
| Parallel Resistance | ||
| Series Resistance | ||
| Diode Ideality Factor | ||
| Number of Cells per Module | ||
| PV Open Circuit Voltage | ||
| PV Short Circuit Current | ||
| PV Voltage at MPP | ||
| PV Current at MPP | ||
| PV Array Maximum Power | ||
| PV Input Capacitor | ||
| PV Inductor | ||
| DC bus Capacitor | ||
| Nominal DC Bus Voltage | ||
| Nominal Battery Voltage | ||
| Battery Internal Resistance | ||
| Battery Capacity | ||
| Battery Inductor | ||
| Switching Frequency |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Alidrissi, Y.; Ouladsine, R.; Elmouatamid, A.; Errouissi, R.; Bakhouya, M. Constant Power Load Stabilization in DC Microgrids Using Continuous-Time Model Predictive Control. Electronics 2022, 11, 1481. https://doi.org/10.3390/electronics11091481
Alidrissi Y, Ouladsine R, Elmouatamid A, Errouissi R, Bakhouya M. Constant Power Load Stabilization in DC Microgrids Using Continuous-Time Model Predictive Control. Electronics. 2022; 11(9):1481. https://doi.org/10.3390/electronics11091481
Chicago/Turabian StyleAlidrissi, Youssef, Radouane Ouladsine, Abdellatif Elmouatamid, Rachid Errouissi, and Mohamed Bakhouya. 2022. "Constant Power Load Stabilization in DC Microgrids Using Continuous-Time Model Predictive Control" Electronics 11, no. 9: 1481. https://doi.org/10.3390/electronics11091481
APA StyleAlidrissi, Y., Ouladsine, R., Elmouatamid, A., Errouissi, R., & Bakhouya, M. (2022). Constant Power Load Stabilization in DC Microgrids Using Continuous-Time Model Predictive Control. Electronics, 11(9), 1481. https://doi.org/10.3390/electronics11091481