
A Source Seeking Method for the Implicit Information Field Based on a Balanced Searching Strategy


Abstract
:1. Introduction
- (1)
- The acquisition of information has a clear field measurement attribute, which meets the requirements of an implicit information field. This means that environmental information about unarrived at locations cannot be obtained in advance.
- (2)
- The source search task does not depend on a prior database, and the source search path cannot be obtained in advance.
- (1)
- Research on navigation and positioning under conditions of limited information detection, drawing inspiration from animal homing behavior;
- (2)
- A balanced search strategy approach was proposed from a search bias perspective to address black box problems, including implicit information;
- (3)
- By conducting theoretical analysis and simulation experiments, the algorithm’s convergence was confirmed, and the optimal search bias value was determined. This provides a solid theoretical foundation for future research.
2. Problem Description
3. A Source Seeking Method Based on a Balanced Searching Strategy
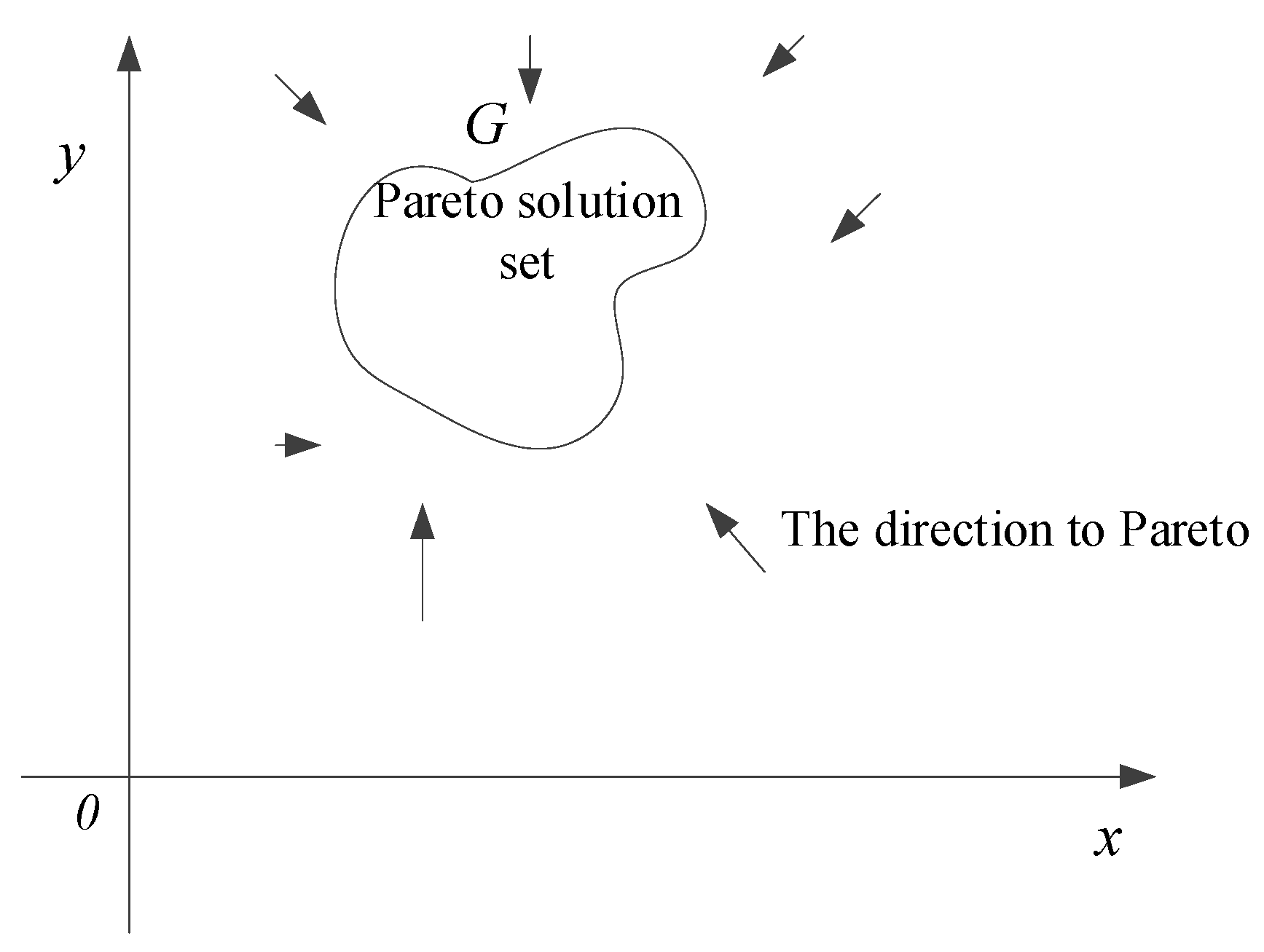
3.1. Characteristic Analysis of the Source of an Implicit Information Field
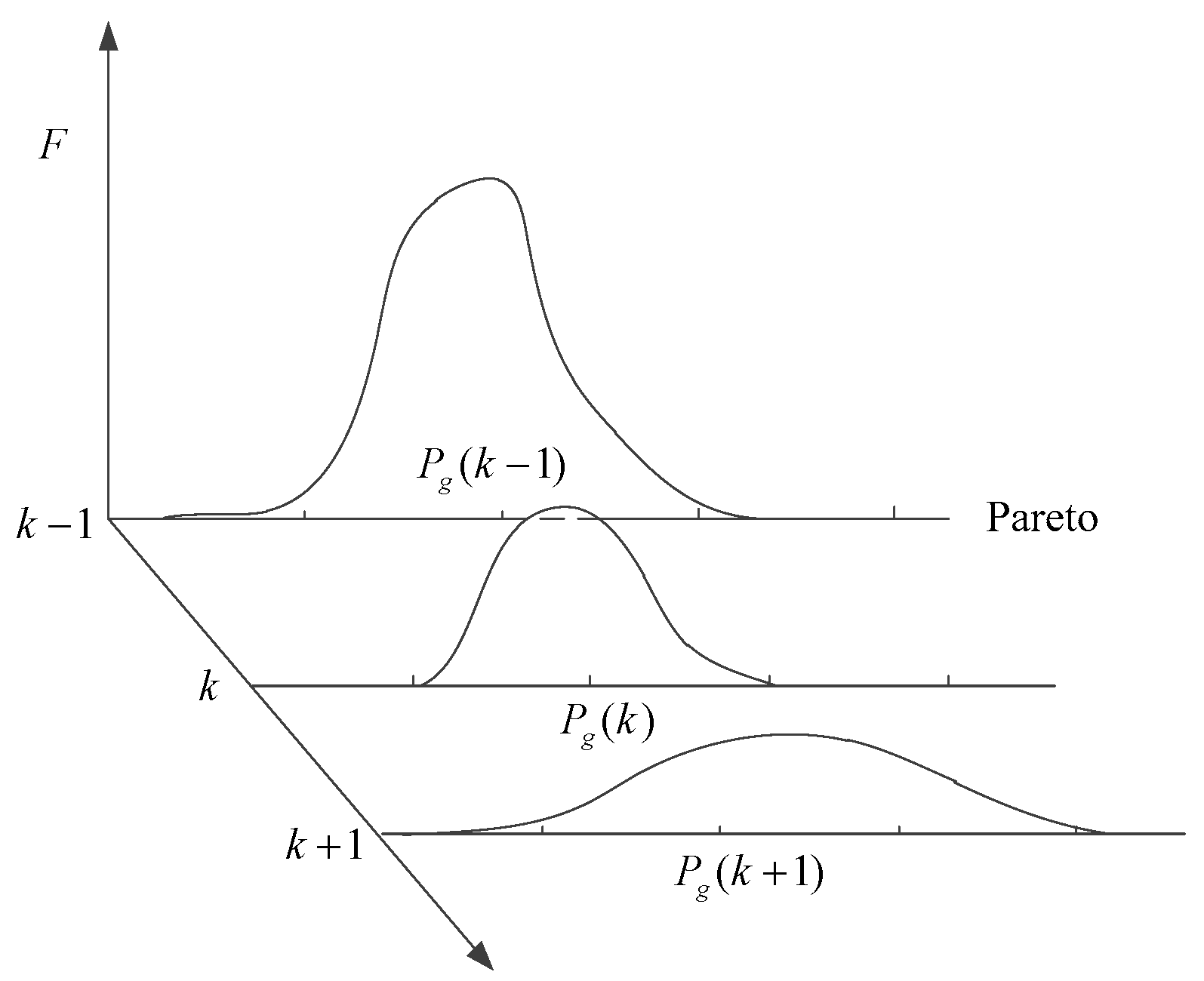
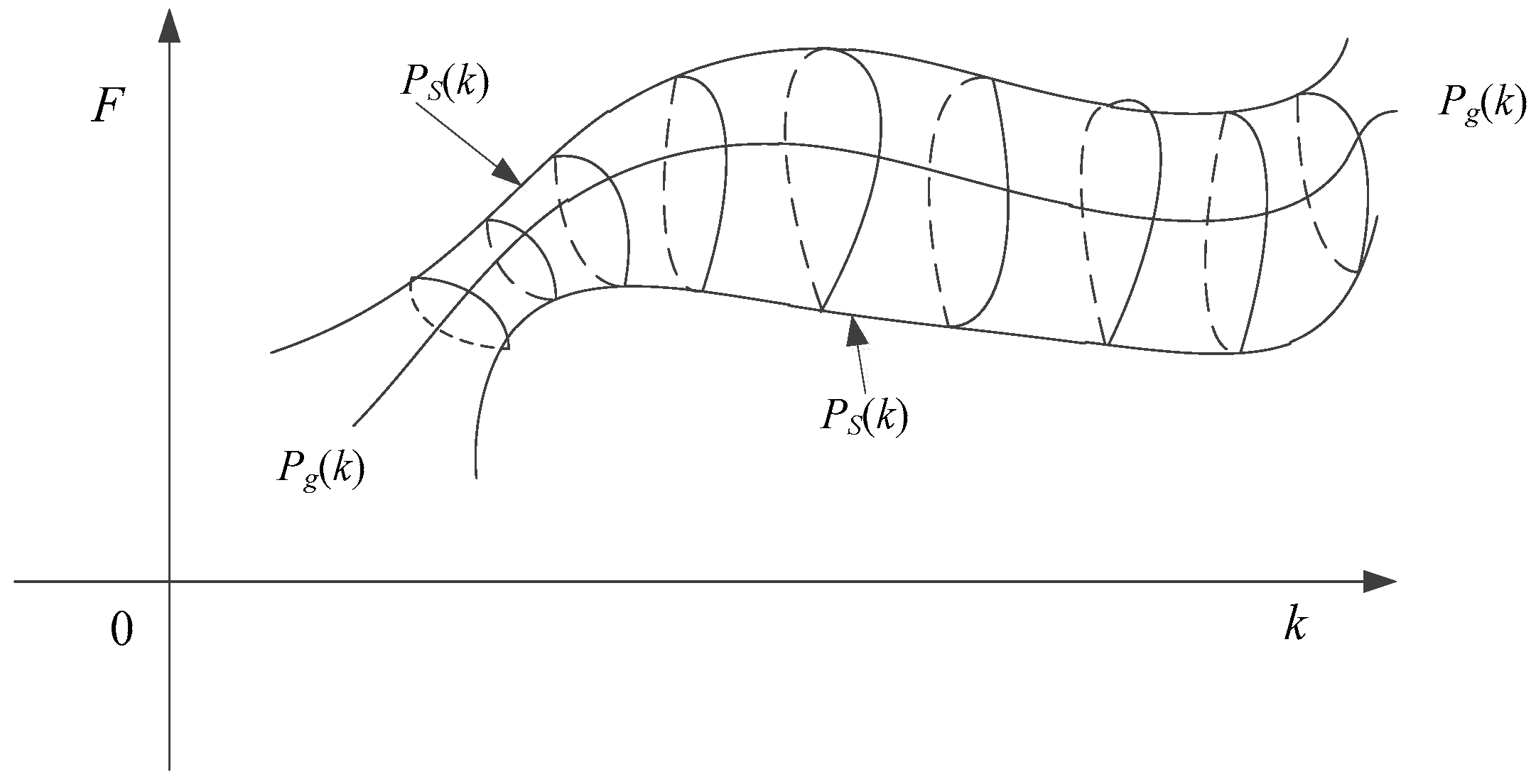
3.2. Source Seeking Behavior of Implicit Information Field Based on Motion Path
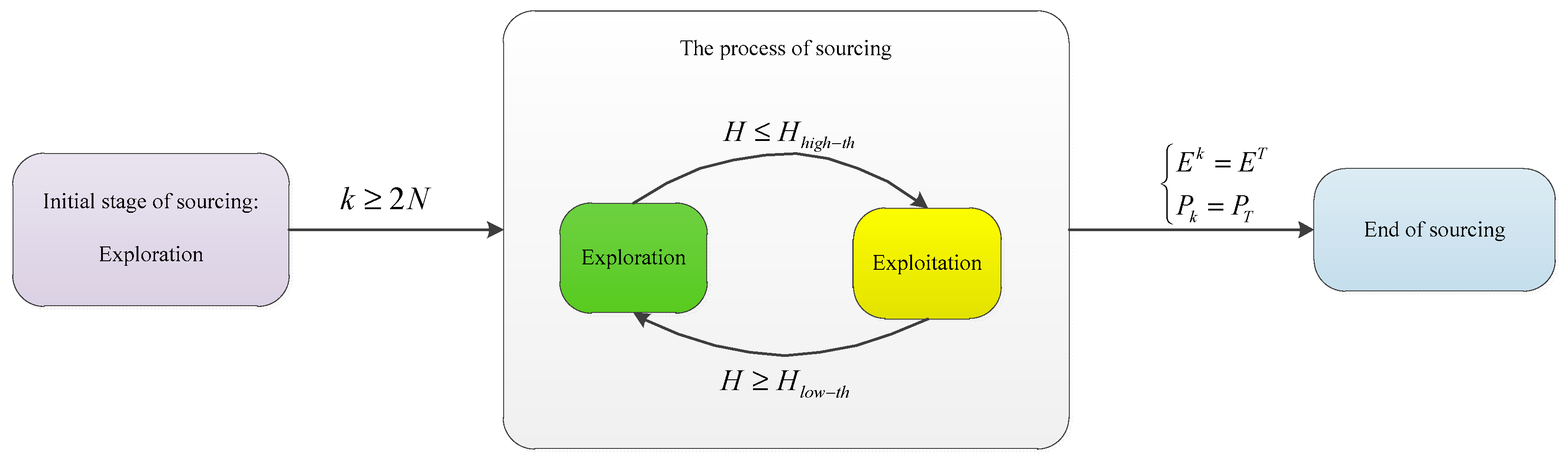
3.3. Balanced Searching Strategy
3.3.1. Exploration and Exploitation
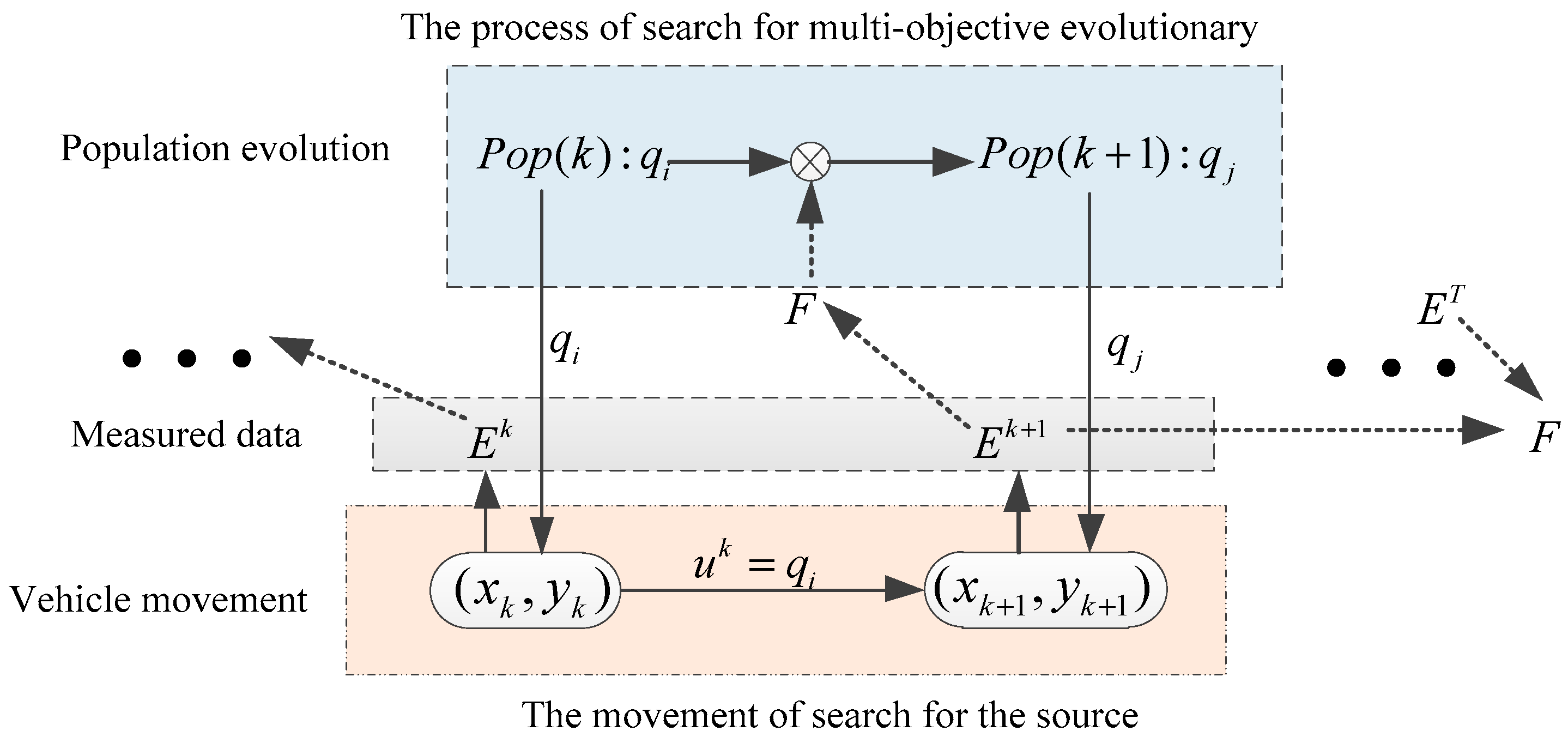
3.3.2. The Algorithm of Source Seeking
- (1)
- Search behavior design based on evolutionary algorithm
- (2)
- Search bias measure
- (3)
- The strategy of balance
4. Algorithm Performance Analysis
4.1. Analysis for the Convergence of the Algorithm
4.2. Analysis for the Performance of Source Seeking
5. Experiment
5.1. Simulation Background Field and Source Seeking Parameter Setting
- (1)
- Parameter setting for carrier movement
- (2)
- Parameter setting for BSS algorithm
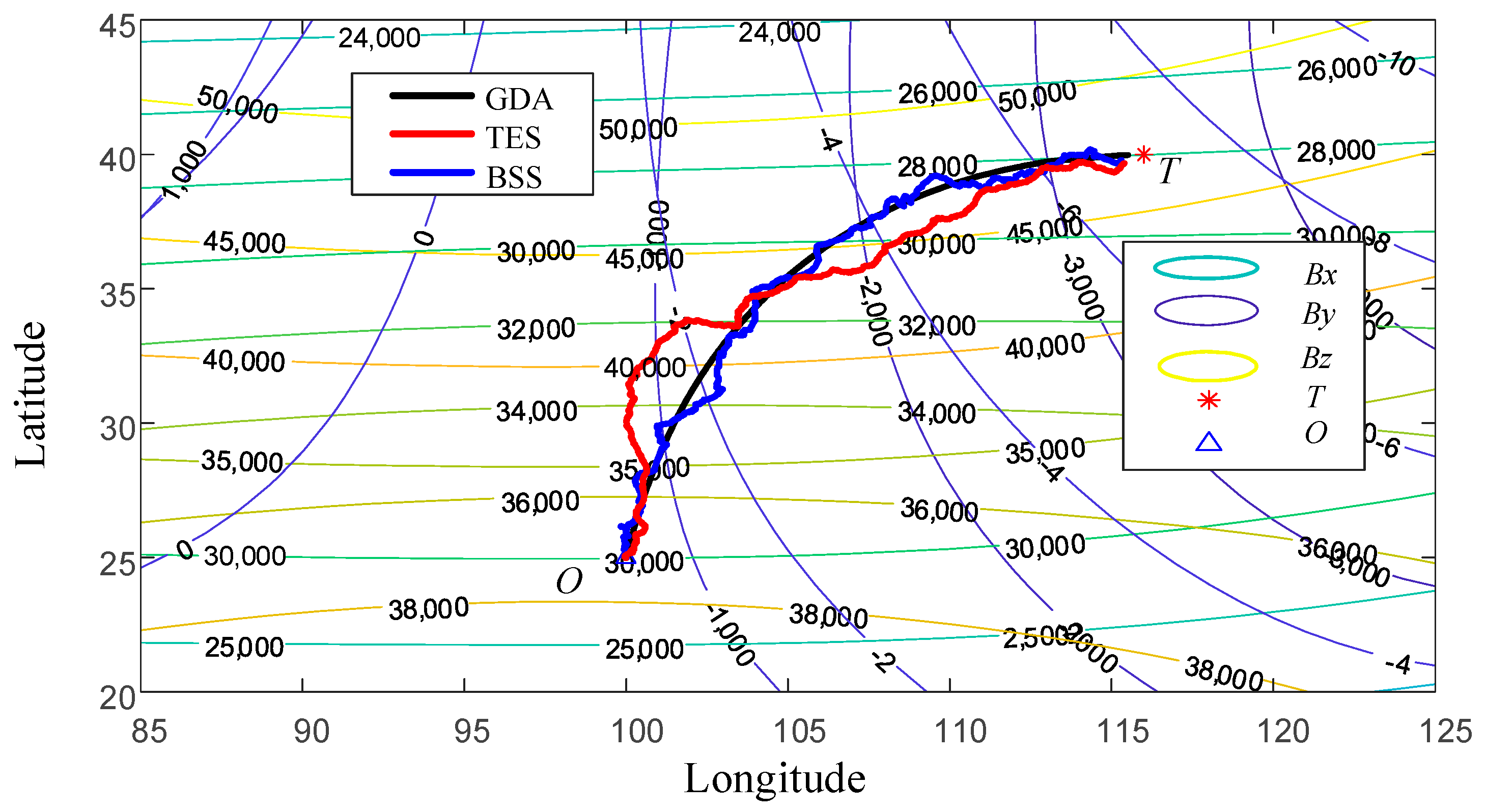
5.2. Comparison of Different Algorithms
5.3. Influence of Different Parameters on Algorithm Performance
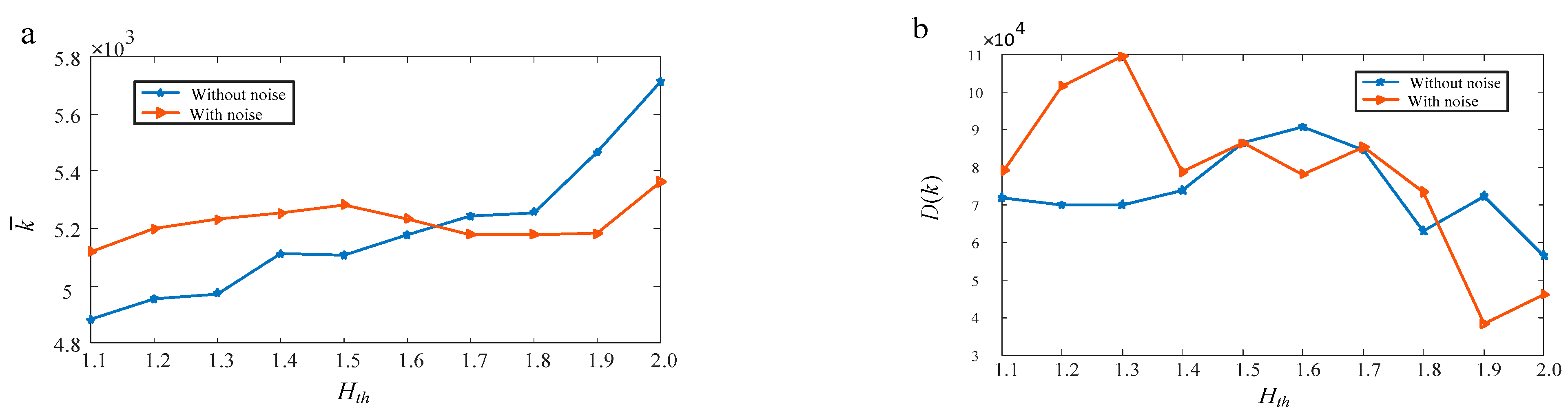
5.3.1. Analysis of the Influence of
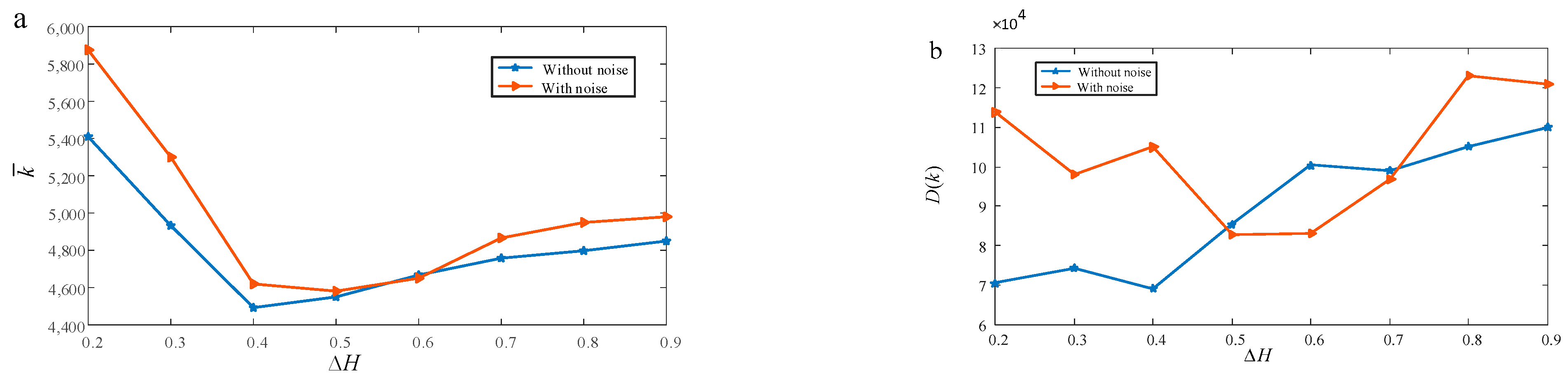
5.3.2. Analysis of the Influence of
5.3.3. Analysis of the Influence of Search Bias Migration Speed
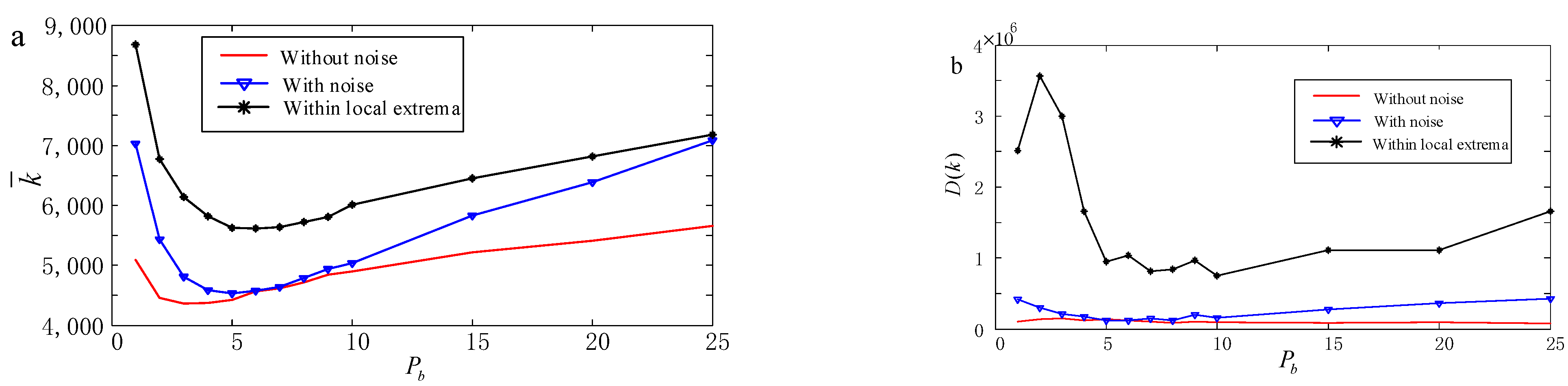
5.3.4. Analysis of the Influence of
- (1)
- Impact of on source localization performance in the presence of constant
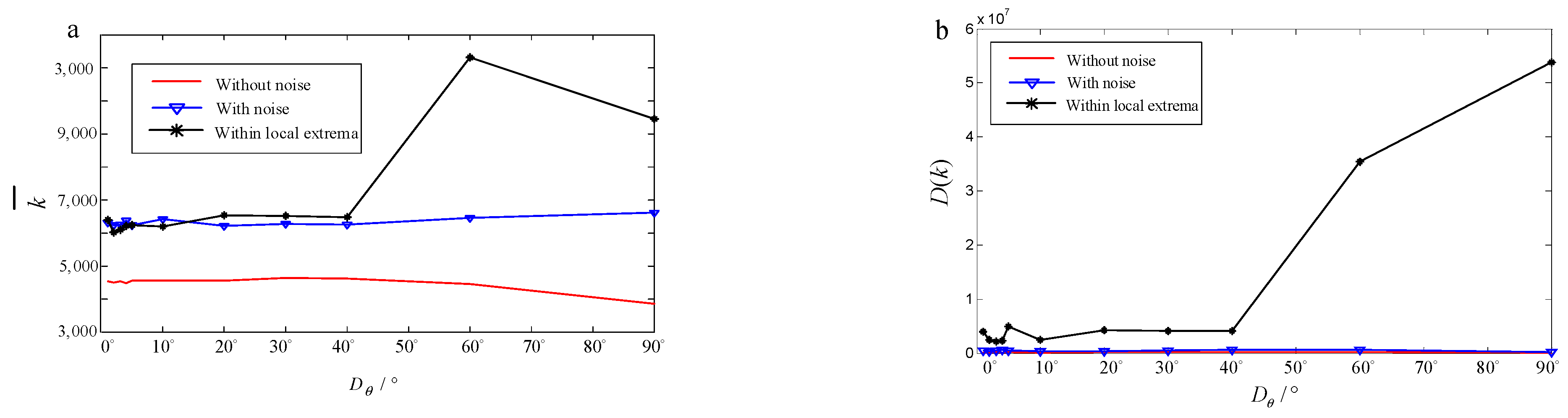
- (2)
- Influence of on source search performance with equal sample size
- (1)
- Under the circumstance of an equal population size, altering the sampling interval did not significantly impact the performance of the source detection algorithm.
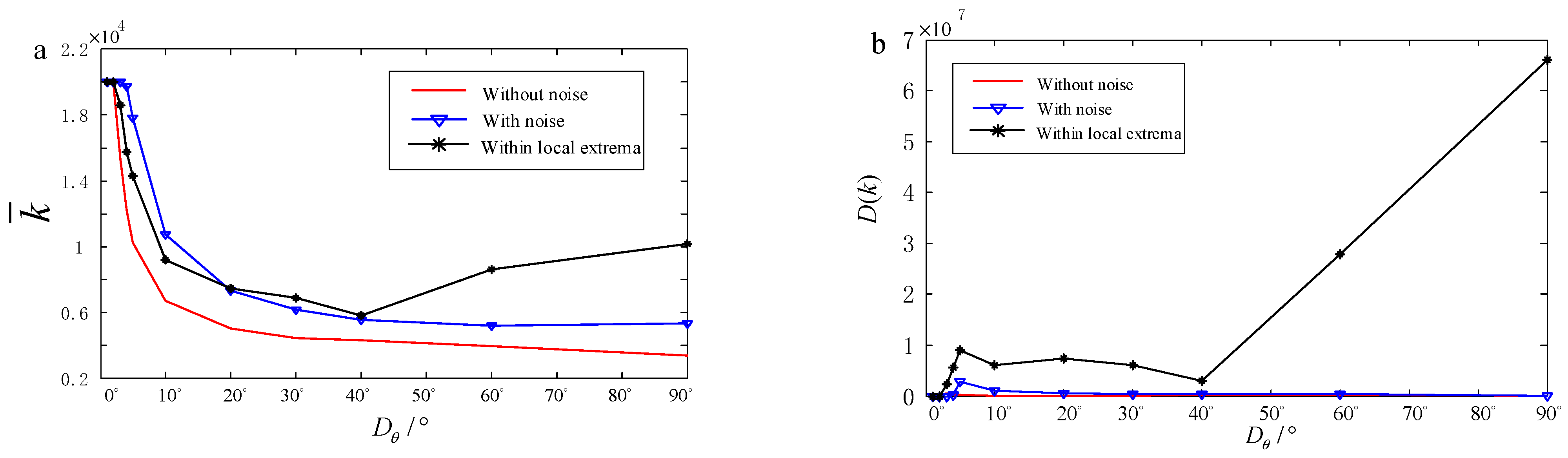
- (2)
- With equal sample sizes, changes in the sampling intervals significantly impacted the performance of the source finding algorithms. Within a certain range, increasing the sampling interval could greatly reduce the navigation time while diminishing the effect of .
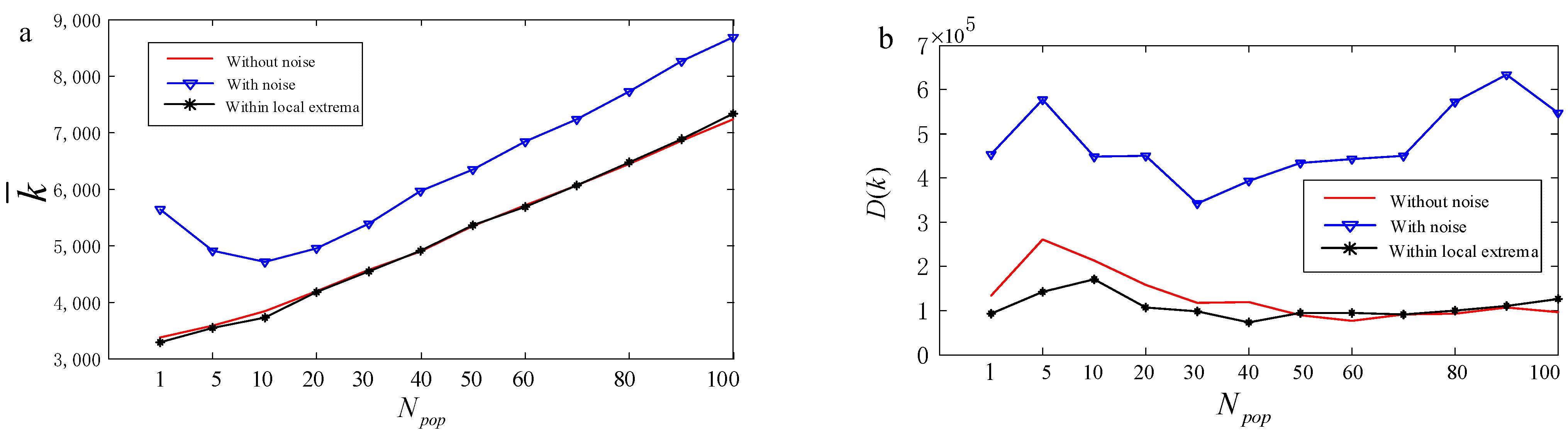
5.3.5. Analysis of the Influence of
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Zhang, C.; Arnold, D.; Ghods, N.; Siranosian, A.; Krstic, M. Source Seeking with Nonholonomic Unicycle Without Position Measurement—Part I: Tuning of Forward Velocity. Syst. Control Lett. 2007, 56, 245–252. [Google Scholar] [CrossRef]
- Cochran, J.; Siranosian, A.; Ghods, N. Source seeking with a nonholonomic unicycle without position measurements and with tuning of angular velocity—Part II: Applications. In Proceedings of the 2007 IEEE Conference on Decision and Control, New Orleans, LA, USA, 12–14 December 2007; pp. 1951–1956. [Google Scholar] [CrossRef]
- Khyade, V.B.; Kandel, E.R. Geomagnetic Field and Animal Orientation. Int. J. Soc. Sci. Humanit. Res. 2018, 6, 27–42. [Google Scholar]
- Putman, N.F. Animal Navigation: Seabirds Home to a Moving Magnetic Target. Curr. Biol. 2020, 30, 802–804. [Google Scholar] [CrossRef] [PubMed]
- Willis, M.A. Odor-modulated Navigation in Insects and Artificial Systems. Chem. Senses 2005, 30, 287–288. [Google Scholar] [CrossRef] [Green Version]
- Anderson, R.B.; Pryor, M.; Abeyta, A.; Landsberger, S. Mobile Robotic Radiation Surveying with Recursive Bayesian Estimation and Attenuation Modelling. IEEE Trans. Autom. Sci.Eng. 2020, 19, 410–424. [Google Scholar] [CrossRef]
- O’Connor, A.; Setlur, P.; Devroye, N. Single-sensor RF emitter localization based on multipath exploitation. IEEE Trans. Aerosp. Electron. Syst. 2015, 51, 1635–1651. [Google Scholar] [CrossRef]
- Jing, T.; Meng, Q.; Ishida, H. Recent Progress and Trend of Robot Odor Source Localization. IEEJ Trans. Electr. Electron. Eng. 2021, 16, 938–953. [Google Scholar] [CrossRef]
- Golov, Y.; Liberzon, A.; Gurka, R.; Soroker, V.; Jurenka, R.; Harari, A. Navigation in an odorant-landscape: Mate finding and mate choice in a nocturnal moth. Entomol.Gen. 2021, 42, 323–334. [Google Scholar] [CrossRef]
- Atanasov, N.A.; Le Ny, J.; Pappas, G.J. Distributed Algorithms for Stochastic Source Seeking with Mobile Robot Networks: Technical Report. J. Dyn. Syst. Meas. Control. 2015, 137, 031004. [Google Scholar] [CrossRef]
- Wu, W.; Couzin, I.D.; Zhang, F. Bio-inspired Source Seeking with no Explicit Gradient Estimation. IFAC Proc. Vol. 2012, 45, 240–245. [Google Scholar] [CrossRef] [Green Version]
- Atanasov, N.; Le Ny, J.; Michael, N.; Pappas, G.J. Stochastic source seeking in complex environments. In Proceedings of the 2012 IEEE International Conference on Robotics and Automation, Saint Paul, MN, USA, 14–18 May 2012; pp. 3013–3018. [Google Scholar] [CrossRef] [Green Version]
- Liu, M.; Li, B.; Chen, Y.; Yang, Z.; Zhao, N.; Liu, P.; Gong, F. Location Parameter Estimation of Moving Aerial Target in Space-Air-Ground Integrated Networks-Based IoV. IEEE Internet Things J. 2021, 9, 5696–5707. [Google Scholar] [CrossRef]
- Liu, M.; Liu, C.; Li, M.; Chen, Y.; Zheng, S.; Zhao, N. Intelligent passive detection of aerial target in space-air-ground integrated networks. ChinaCommun. 2022, 19, 52–63. [Google Scholar] [CrossRef]
- Paliotta, C.; Belleter, D.J.; Pettersen, K.Y. Adaptive Source Seeking with Leader-Follower Formation Control. IFAC-PapersOnLine 2015, 48, 285–290. [Google Scholar] [CrossRef]
- Gronemeyer, M.; Alpen, M.; Horn, J. Limited Gradient Criterion for Global Source Seeking with Mobile Robots. IFAC-PapersOnLine 2020, 53, 15288–15293. [Google Scholar] [CrossRef]
- Vergassola, M.; Villermaux, E.; Shraiman, B.I. ‘Infotaxis’ as a strategy for searching without gradients. Nature 2007, 445, 406–415. [Google Scholar] [CrossRef]
- Loisy, A.; Eloy, C. Searching for a source without gradients: How good is infotaxis and how to beat it. Proc. R. Soc. A 2022, 478, 20220118. [Google Scholar] [CrossRef]
- Liu, M.; Liu, Z.; Lu, W.; Chen, Y.; Gao, X.; Zhao, N. Distributed Few-Shot Learning for Intelligent Recognition of Communication Jamming. IEEE J. Sel. Top. Signal Process. 2021, 16, 395–405. [Google Scholar] [CrossRef]
- Liu, M.; Wang, J.; Zhao, N.; Chen, Y.; Song, H.; Yu, F.R. Radio Frequency Fingerprint Collaborative Intelligent Identification Using Incremental Learning. IEEE Trans. Netw. Sci. Eng. 2021, 9, 3222–3233. [Google Scholar] [CrossRef]
- Liu, M.; Liu, C.; Chen, Y.; Yan, Z.; Zhao, N. Radio Frequency Fingerprint Collaborative Intelligent Blind Identification for Green Radios. IEEE Trans. Green Commun. Netw. 2022, 7, 940–949. [Google Scholar] [CrossRef]
- Liu, M.; Zhang, H.; Liu, Z.; Zhao, N. Attacking Spectrum Sensing With Adversarial Deep Learning in Cognitive Radio-Enabled Internet of Things. IEEE Trans. Reliab. 2022, 72, 431–444. [Google Scholar] [CrossRef]
- Liu, M.; Zhang, Z.; Chen, Y.; Ge, J.; Zhao, N. Adversarial Attack and Defense on Deep Learning for Air Transportation Communication Jamming. IEEE Trans. Intell. Transp. Syst. 2023, 1–14. [Google Scholar] [CrossRef]
- Devi, R.M.; Premkumar, M.; Jangir, P.; Elkotb, M.A.; Elavarasan, R.M.; Nisar, K.S. IRKO: An Improved Runge-Kutta Optimization Algorithm for Global Optimization Problems. Comput. Mater. Contin. 2022, 70, 4803–4827. [Google Scholar]
- Gupta, D.; Dhar, A.R.; Roy, S.S. A partition cum unification based genetic-firefly algorithm for single objective optimization. Sādhanā 2021, 46, 121. [Google Scholar] [CrossRef]
- Ćrepinšek, M.; Liu, S.; Mernik, M. Exploration and exploitation in evolutionary algorithms: A survey. ACM Comput. Surv. 2013, 45, 1–33. [Google Scholar] [CrossRef]
- Van Nguyen, T.T.; Phung, M.D.; Tran, Q.V. Behavior-based Navigation of Mobile Robot in Unknown Environments Using Fuzzy Logic and Multi-Objective Optimization. Int. J. Control. Autom. 2017, 10, 349–364. [Google Scholar] [CrossRef]
- Anagnostopoulos, G.G.; Deriaz, M.; Konstantas, D. A Multiobjective Optimization Methodology of Tuning Indoor Positioning Systems. In Proceedings of the 2017 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Sapporo, Japan, 18–21 September 2017; pp. 1–8. [Google Scholar] [CrossRef]
- Giagkiozis, I.; Fleming, P. Methods for multi-objective optimization: An analysis. Inf. Sci. 2015, 293, 338–350. [Google Scholar] [CrossRef] [Green Version]
- Salazar, J.Z.; Reed, P.M.; Quinn, J.D.; Giuliani, M.; Castelletti, A. Balancing exploration, uncertainty and computational demands in many objective reservoir optimization. Adv. Water Resour. 2017, 109, 196–210. [Google Scholar] [CrossRef]
- Liu, M.; Liu, K.; Li, H.; Li, Y. A Study of Bio-Inspired Geomagnetic Navigation Using Timing Evolution Searching Strategy. J. Northwestern Ploytechnical Univ. 2014, 32, 894–898. [Google Scholar]
- Li, H.; Liu, M.; Liu, K. Bio-inspired geomagnetic navigation method for autonomous underwater vehicle. J. Syst. Eng. Electron. 2017, 28, 1203–1209. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Algorithm | Source Seeking Task | ||||
|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | |
| GDA | 2787 | 2266 | 2406 | 2490 | 2413 |
| TES | 5828 | 4868 | 5036 | 5168 | 5110 |
| BSS | 5016 | 4223 | 4406 | 4486 | 4398 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, K.; Bi, Y.; Zhang, Q.; Li, J. A Source Seeking Method for the Implicit Information Field Based on a Balanced Searching Strategy. Electronics 2023, 12, 3027. https://doi.org/10.3390/electronics12143027
Liu K, Bi Y, Zhang Q, Li J. A Source Seeking Method for the Implicit Information Field Based on a Balanced Searching Strategy. Electronics. 2023; 12(14):3027. https://doi.org/10.3390/electronics12143027
Chicago/Turabian StyleLiu, Kun, Yang Bi, Qi Zhang, and Junfang Li. 2023. "A Source Seeking Method for the Implicit Information Field Based on a Balanced Searching Strategy" Electronics 12, no. 14: 3027. https://doi.org/10.3390/electronics12143027
APA StyleLiu, K., Bi, Y., Zhang, Q., & Li, J. (2023). A Source Seeking Method for the Implicit Information Field Based on a Balanced Searching Strategy. Electronics, 12(14), 3027. https://doi.org/10.3390/electronics12143027