
Hybrid Model Predictive Control with Penalty Factor Based on Image-Based Visual Servoing for Constrained Mobile Robots


Abstract
:1. Introduction
- (1)
- For the mobile robot system subject to feature point motion constraints, the IBVS-based incremental model predictive control algorithm is designed, to solve the problem of feature point loss and system instability due to excessive target deviation gain when the traditional IBVS control method is applied to an automatic parking control system. The traditional IBVS control is transformed into an optimization problem with constraints in the finite time domain, by defining the optimization function based on the mobile robot’s positional deviation and image feature point deviation, while using actuator saturation and speed limit as constraints. Then, the accuracy and real-time of the mobile robot tracking control during automatic parking is improved simultaneously.
- (2)
- For the problem of emergency braking of mobile robot automatic parking in dynamic obstacle scenes, by defining the convex optimization function with penalty factor, the hybrid model predictive control with a penalty factor based on IBVS (IBVS-PF-HMPC) is proposed. Then, it could guarantee the emergency braking performance of the mobile robot automatic parking when the image feature points are massively obstructed by obstacles in dynamic scenes.
2. Problem Formulation
2.1. Model of Mobile Robots
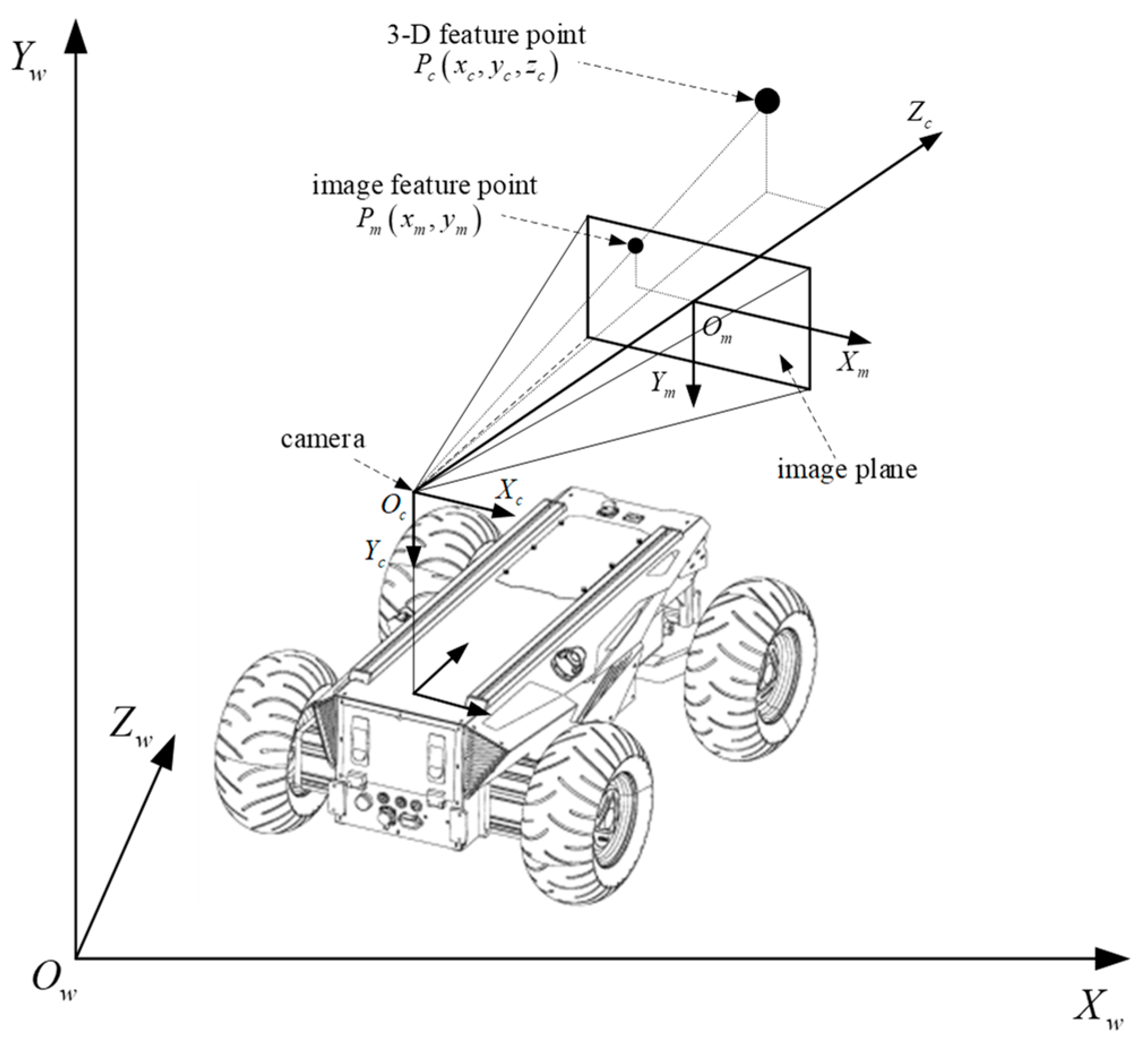
2.2. Model of IBVS System
3. Controller Design
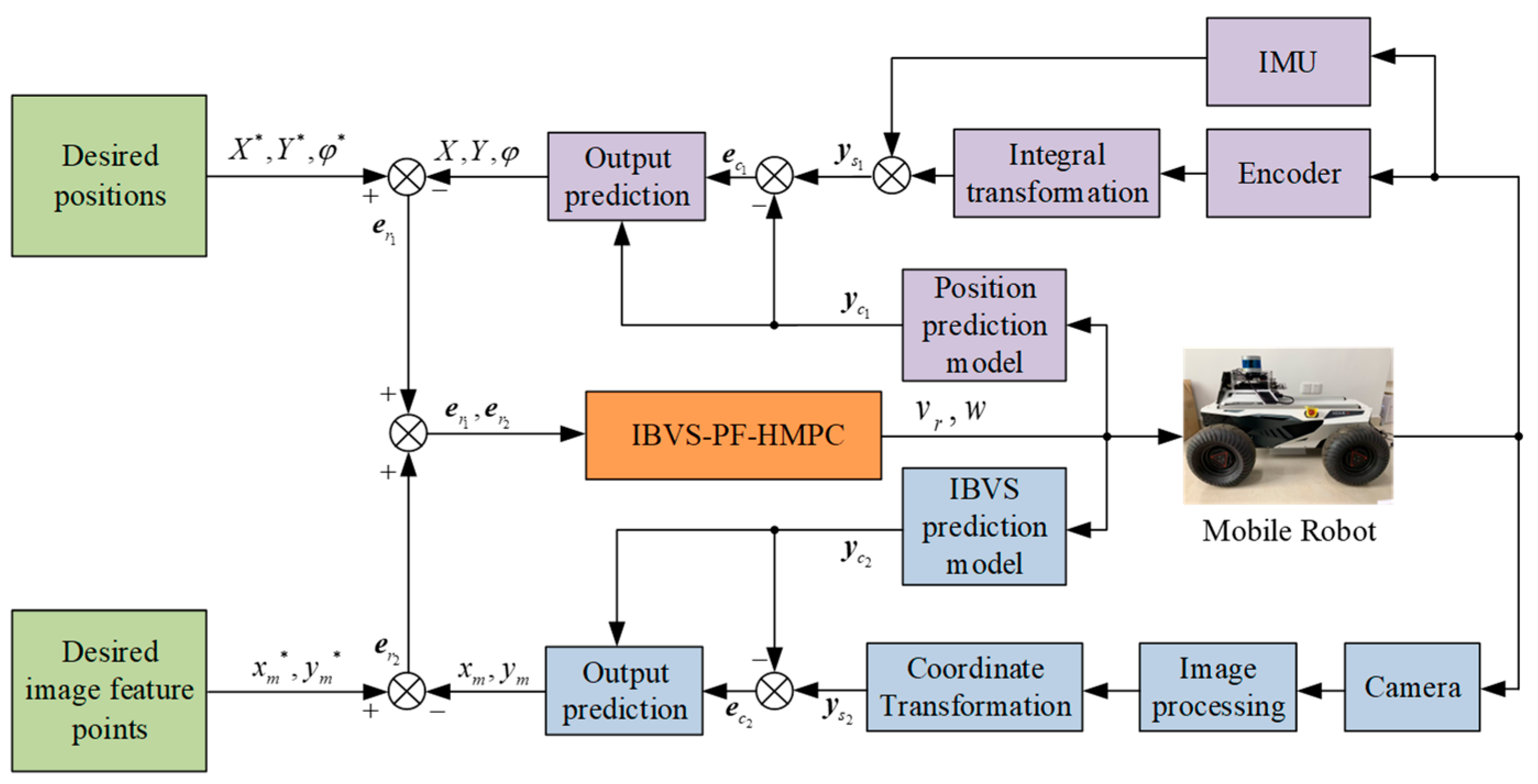
3.1. Design of the Hybrid Model Predictive Control Based on IBVS
3.2. Design of the IBVS-PF-HMPC
4. Simulation Results
4.1. Parking Trajectory Planning
4.2. Stability Performance
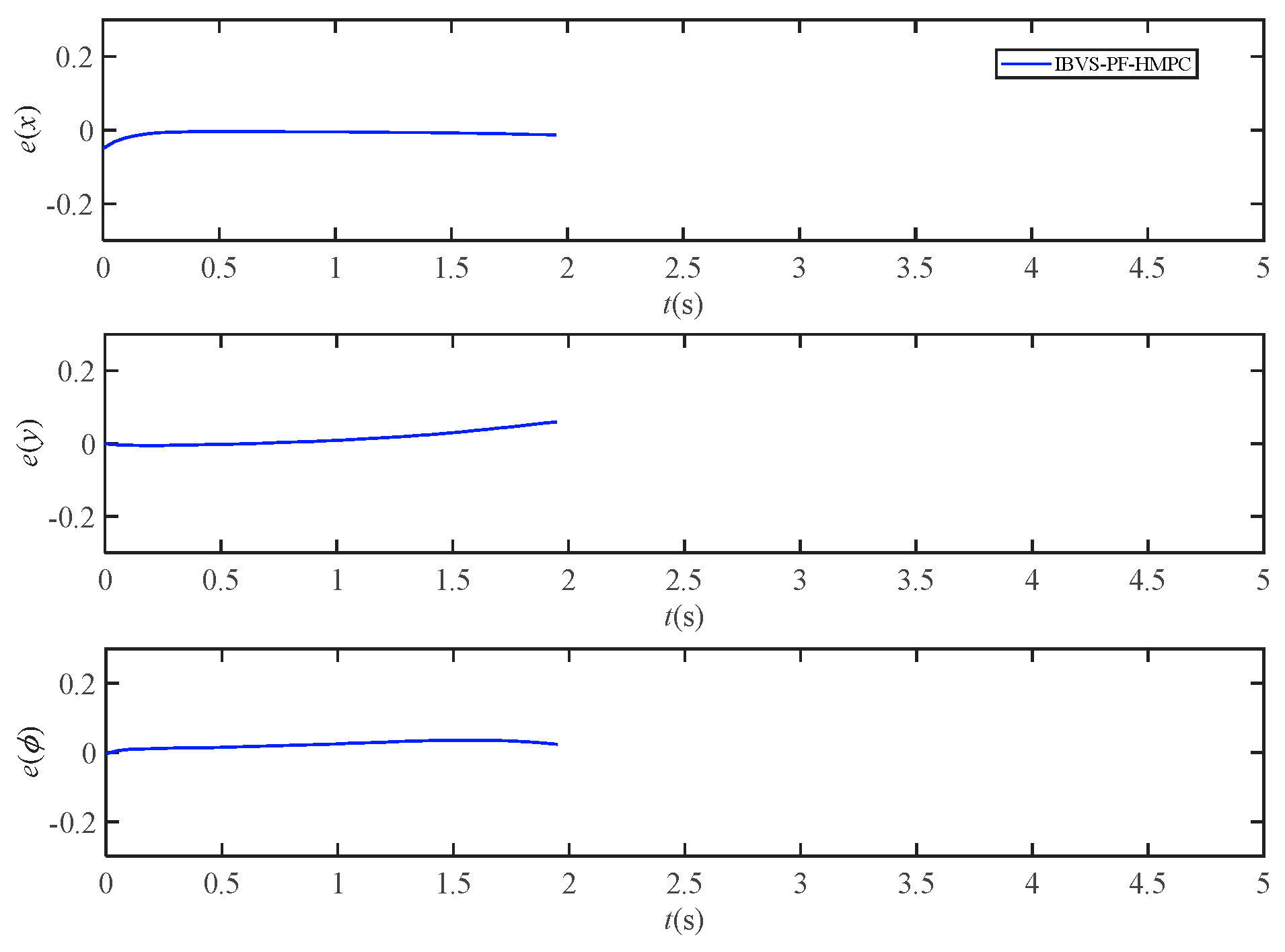
4.3. Tracking Accuracy Performance
4.4. Real-Time Performance
4.5. Emergency Braking Performance
5. Conclusions
- (1)
- The IBVS-based incremental model predictive control algorithm is designed. The traditional IBVS control is transformed into an optimization problem with constraints in the finite time domain, by defining the optimization function based on the mobile robot’s positional deviation and image feature point deviation, while using the actuator saturation and speed limit as constraints. Then, the accuracy and real-time of the mobile robot tracking control during automatic parking is improved simultaneously.
- (2)
- The convex optimization function with penalty factor is defined. Then, the IBVS-PF-HMPC is proposed, to guarantee the emergency braking performance of the mobile robot automatic parking when the image feature points are massively obstructed by obstacles in dynamic scenes.
- (3)
- Several simulation comparisons further verify the correctness and effectiveness of the proposed IBVS-PF-HMPC.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Yu, Y. Smart parking system based on edge-cloud-dew computing architecture. Electronics 2023, 12, 2801. [Google Scholar] [CrossRef]
- Chen, W.; Xu, T.; Liu, J.; Wang, M.; Zhao, D. Picking robot visual servo control based on modified fuzzy neural network sliding mode algorithms. Electronics 2019, 8, 605. [Google Scholar] [CrossRef] [Green Version]
- He, S.; Xu, Y.; Guan, Y.; Li, D.; Xi, Y. Synthetic robust model predictive control with input mapping for constrained visual servoing. IEEE Trans. Ind. Electron. 2023, 70, 9270–9280. [Google Scholar] [CrossRef]
- Xu, D. A tutorial for monocular visual servoing. Acta Automatica Sin. 2018, 44, 1729–1746. [Google Scholar]
- Zhong, H.; Wang, Y.; Miao, Z.; Li, L.; Fan, S.; Zhang, H. A homography-based visual servo control approach for an underactuated unmanned aerial vehicle in GPS-denied environments. IEEE T. Intell. Veh. 2023, 8, 1119–1129. [Google Scholar] [CrossRef]
- Chan, W.; Srigrarom, S. Image-based visual-servoing for air-to-air drone tracking & following with model predictive control. In Proceedings of the 2023 SICE International Symposium on Control Systems (SICE ISCS), Kusatsu, Japan, 9–11 March 2023. [Google Scholar]
- Aaron, M.; Marwen, J.; Peter, C. Image-based visual servoing with unknown point feature correspondence. IEEE Robot. Autom. Lett. 2017, 2, 601–607. [Google Scholar]
- Becerra, H.; Lopez-Nicolas, G.; Saguees, C. A sliding-mode-control law for mobile robots based on epipolar visual servoing from three views. IEEE Trans. Robot. 2011, 27, 175–183. [Google Scholar] [CrossRef]
- Wang, F.; Qin, Y.; Guo, F.; Ren, B.; John, T. Adaptive visually servoed tracking control for wheeled mobile robot with uncertain model parameters in complex environment. Complexity 2020, 3, 8836468. [Google Scholar] [CrossRef]
- Sunhyo, K.; Se-Young, O. Hybrid position and image based visual servoing for mobile robots. J. Intell. Fuzzy Syst. 2007, 18, 73–82. [Google Scholar]
- Li, B.; Fang, Y.; Hu, G.; Zhang, X. Model-free unified tracking and regulation visual servoing of wheeled mobile robots. IEEE Trans. Control Syst. Technol. 2016, 24, 1328–1339. [Google Scholar] [CrossRef]
- Fang, Y.; Liu, X.; Zhang, X. Adaptive active visual servoing of nonholonomic mobile robots. IEEE Trans. Ind. Electron. 2012, 59, 486–497. [Google Scholar] [CrossRef]
- Zhang, K.; Chen, J.; Li, Y.; Gao, Y. Unified visual servoing tracking and regulation of wheeled mobile robots with an uncalibrated camera. IEEE-ASME Trans. Mechatron. 2018, 23, 1728–1739. [Google Scholar] [CrossRef]
- Yuan, W.; Liu, Y.; Su, C.; Zhao, F. Whole-body control of an autonomous mobile manipulator using model predictive control and adaptive fuzzy technique. IEEE Trans. Fuzzy Syst. 2023, 31, 799–809. [Google Scholar] [CrossRef]
- Kang, E.; Qiao, H.; Chen, Z.; Gao, J. Tracking of uncertain robotic manipulators using event-triggered model predictive control with learning terminal cost. IEEE Trans. Autom. Sci. Eng. 2022, 19, 2801–2815. [Google Scholar] [CrossRef]
- Heshmati-alamdari, S.; Karavas, G.; Eqtami, A.; Drossakis, M.; Kyriakopoulos, K. Robustness analysis of model predictive control for constrained image-based visual servoing. In Proceedings of the 2014 IEEE International Conference on Robotics and Automation (ICRA), Hong Kong, China, 31 May–7 June 2014. [Google Scholar]
- Bai, H.; Gao, J.; Sun, X.; Yan, W. Model predictive visual trajectory-tracking control of wheeled mobile robots. In Proceedings of the 2019 IEEE 28th International Symposium on Industrial Electronics (ISIE), Vancouver, BC, Canada, 12–14 June 2019. [Google Scholar]
- Heshmati-alamdari, S.; Karras, G.; Eqtami, A.; Kyriakopoulos, K. A robust self-triggered image based visual servoing model predictive control scheme for small autonomous robots. In Proceedings of the 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Hamburg, Germany, 28 September–2 October 2015. [Google Scholar]
- Li, Z.; Yang, C.; Su, C.; Deng, J.; Zhang, W. Vision-based model predictive control for steering of a nonholonomic mobile robot. IEEE Trans. Control Syst. Technol. 2016, 24, 553–564. [Google Scholar] [CrossRef]
- Chi, X.; Liu, Z.; Huang, J.; Hong, F.; Su, H. Optimization-based motion planning for autonomous parking considering dynamic obstacle: A hierarchical framework. In Proceedings of the 2022 34th Chinese Control and Decision Conference (CCDC), Hefei, China, 15–17 August 2022. [Google Scholar]
- Yu, R.; Guo, H.; Chen, H. Predictive obstacle-avoidance control for autonomous vehicle information and control. Inf. Contrl. 2015, 44, 117–124. [Google Scholar]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Steps | Description |
|---|---|
| 1 | Defining an automatic parking trajectories based on mobile robot position and parking space coordinate information; |
| 2 | Capturing the vehicle position image feature points of the camera and calculating the position deviation and image feature point deviation; |
| 3 | Reconstructing the incremental position deviation and image feature point deviation and substituting them into the IBVS-PF-HMPC; |
| 4 | Obtaining the control increment prediction sequence at the current moment from IBVS-PF-HMPC; |
| 5 | Taking the first element of the control increment predictive sequence as the actual control increment at the current moment, and obtaining the model prediction outputs of the state variables from the mobile robot kinematics predictive model (8) and the IBVS predictive model (17); |
| 6 | Modifying model predicted outputs by actual state variables; |
| 7 | Substituting the modified model prediction outputs of the state variables into the IBVS-PF-HMPC, and repeating Steps 3–7. |
| Parameters | Value | Parameters | Value |
|---|---|---|---|
| Wheelbase | 1 | Feature point error increment penalty weight matrix | |
| Control period | 50 | Control incremental error weight matrix | |
| Predicted step-size | 20 | Image feature points | 20 |
| Control step-size | 20 | Control incremental constraint | |
| Position error increment penalty weight matrix | Control constraint |
| IBVS-PF-HMPC | IBVS-MPC | |
|---|---|---|
| IBVS-PF-HMPC | NI-IBVS-PF-HMPC | |
|---|---|---|
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gu, H.; Qin, Q.; Mao, J.; Sun, X.; Huang, Y. Hybrid Model Predictive Control with Penalty Factor Based on Image-Based Visual Servoing for Constrained Mobile Robots. Electronics 2023, 12, 3186. https://doi.org/10.3390/electronics12143186
Gu H, Qin Q, Mao J, Sun X, Huang Y. Hybrid Model Predictive Control with Penalty Factor Based on Image-Based Visual Servoing for Constrained Mobile Robots. Electronics. 2023; 12(14):3186. https://doi.org/10.3390/electronics12143186
Chicago/Turabian StyleGu, Haojie, Qiuyue Qin, Jingfeng Mao, Xingjian Sun, and Yuxu Huang. 2023. "Hybrid Model Predictive Control with Penalty Factor Based on Image-Based Visual Servoing for Constrained Mobile Robots" Electronics 12, no. 14: 3186. https://doi.org/10.3390/electronics12143186
APA StyleGu, H., Qin, Q., Mao, J., Sun, X., & Huang, Y. (2023). Hybrid Model Predictive Control with Penalty Factor Based on Image-Based Visual Servoing for Constrained Mobile Robots. Electronics, 12(14), 3186. https://doi.org/10.3390/electronics12143186