


Neural Network Approach Super-Twisting Sliding Mode Control for Path-Tracking of Autonomous Vehicles
Abstract
:1. Introduction
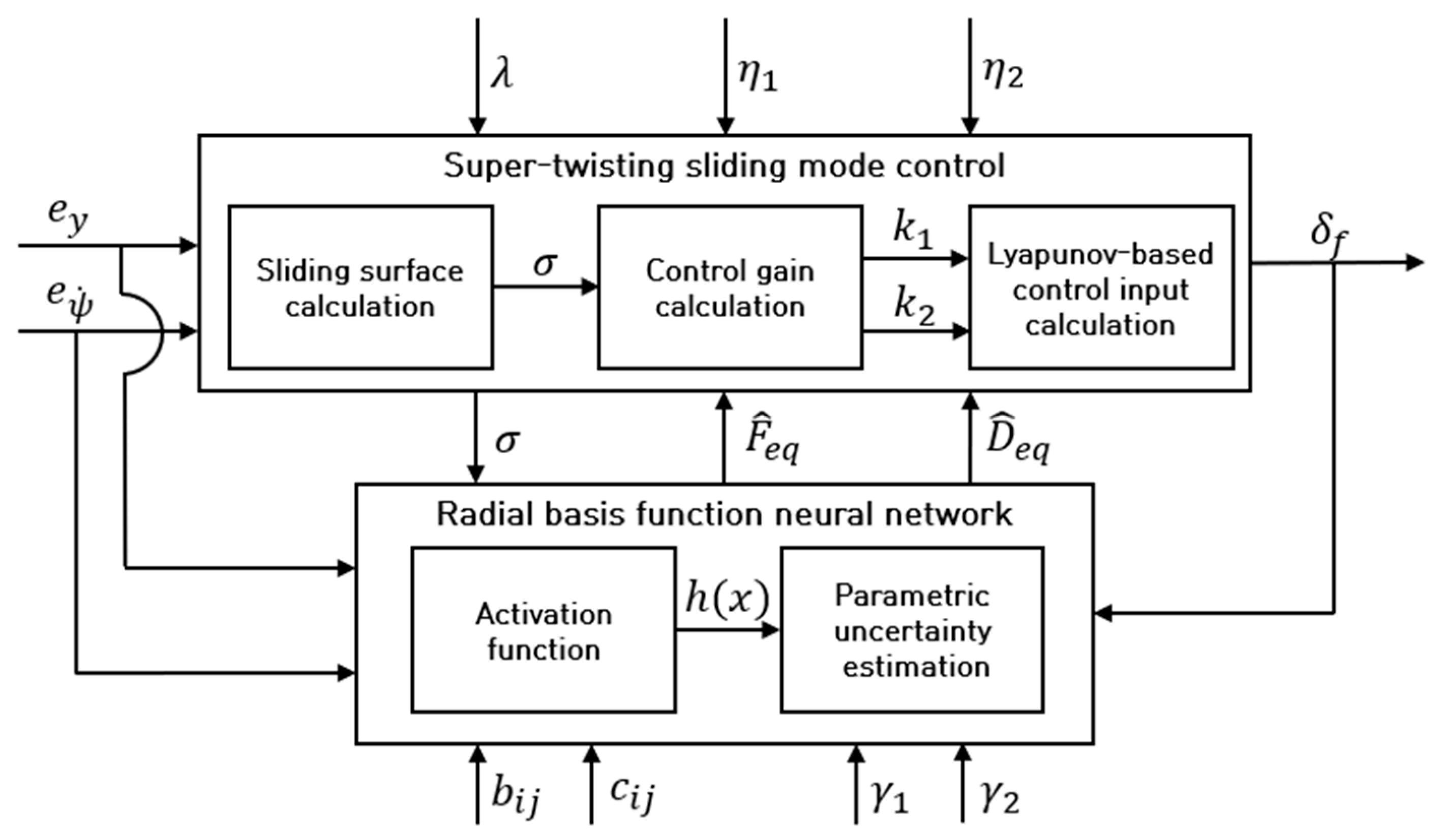
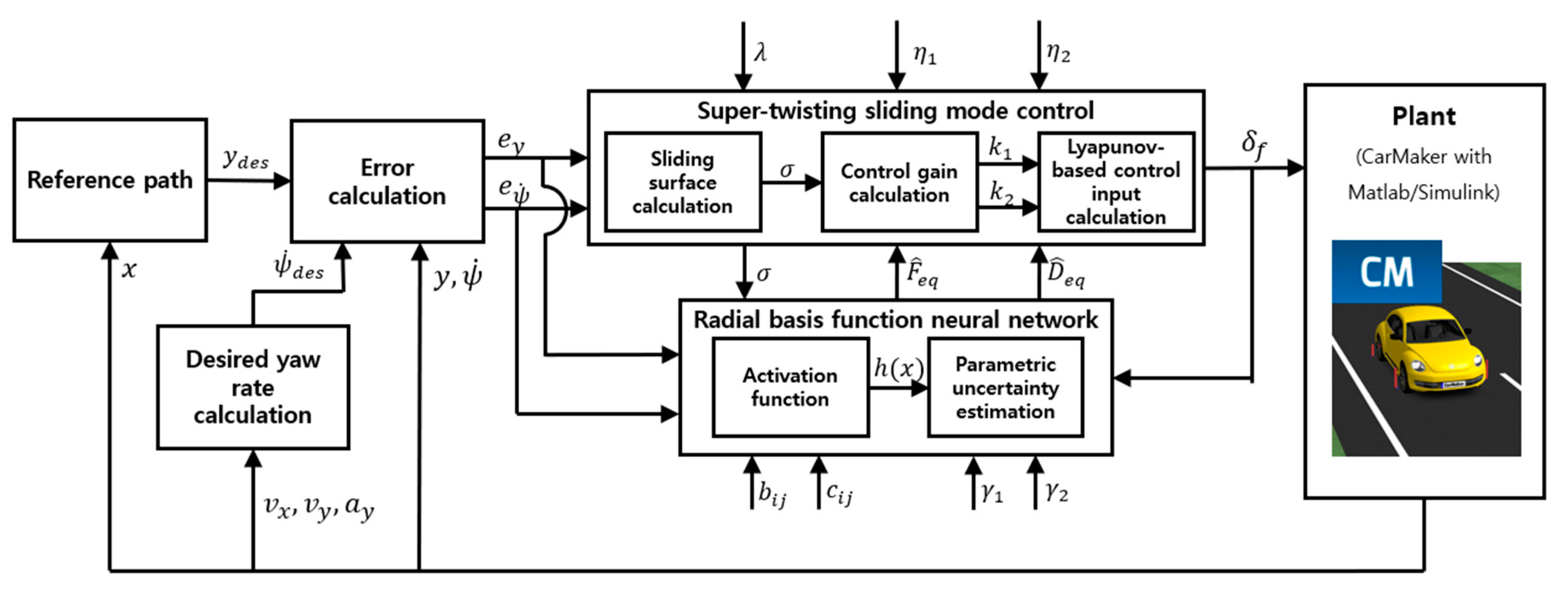
- The STSMC is proposed for the robust path-tracking of autonomous vehicles. This controller is utilized to reduce chattering and improve driving stability. The stability proof of the proposed controller is proven using the Lyapunov method, and conditions for the control gain values are derived.
- RBFNN is designed to estimate parametric uncertainties and disturbances in autonomous vehicles. By using the Lyapunov method, the RBFNN is combined with the STSMC, ensuring parameter estimation and stability proof.
- By using estimated parameters, including parametric uncertainties and disturbances, the steering control input is adaptively adjusted in real time with the control gain. This adaptive rule ensures effective responses to variations in system dynamics and uncertainties.
2. Neural Network Approach Super-Twisting Sliding Mode Control
2.1. Vehicle Lateral Error Dynamics Model
2.2. Super-Twisting Sliding Mode Control
2.3. Neural Network Approach Online Parametric Uncertainty Estimation
3. Simulation-Based Performance Evaluation
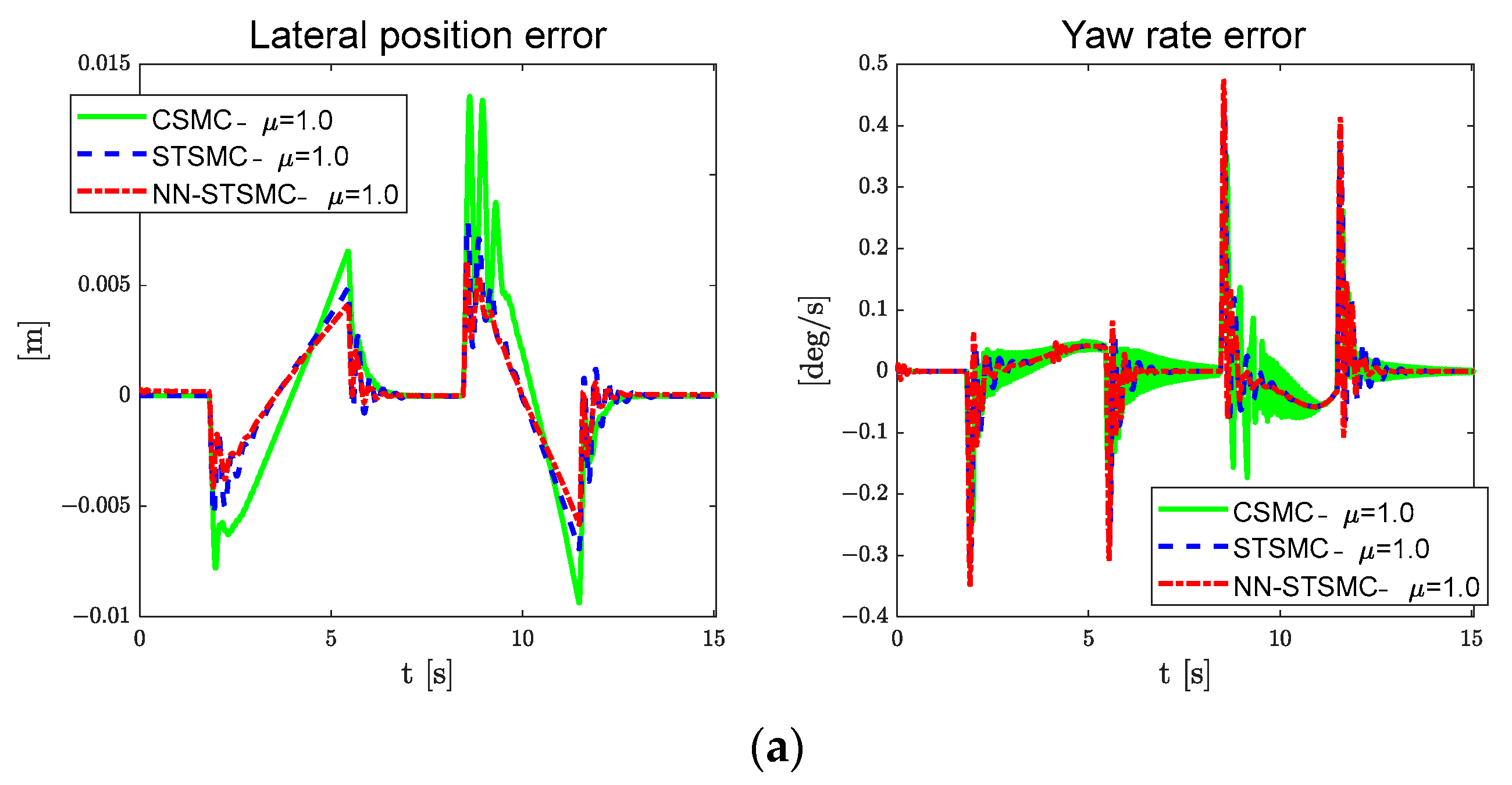
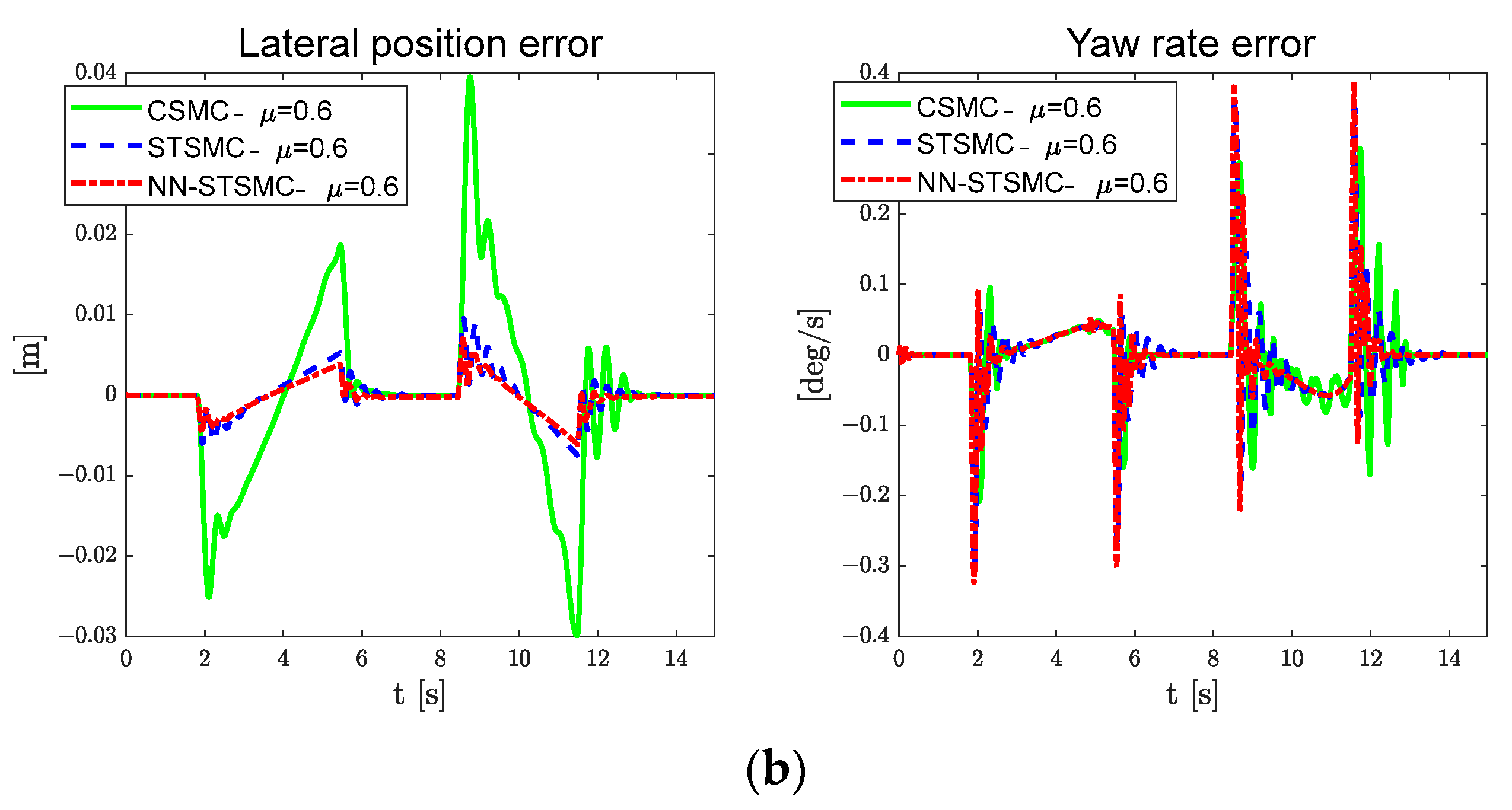
3.1. Performance Evaluation Results in the Double Lane-Change Scenario
3.2. Performance Evaluation Results in the Rapid Path-Tracking Scenario
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Saruchi, S.A.; Mohammed Ariff, M.H.; Zamzuri, H.; Amer, N.H.; Wahid, N.; Hassan, N.; Kassim, K.A.A. Novel Motion Sickness Minimization Control via Fuzzy-PID Controller for Autonomous Vehicle. Appl. Sci. 2020, 10, 4769. [Google Scholar] [CrossRef]
- Kebbati, Y.; Ait-Oufroukh, N.; Vigneron, V.; Ichalal, D.; Gruyer, D. Optimized Self-Adaptive PID Speed Control for Autonomous Vehicles. In Proceedings of the 2021 26th International Conference on Automation and Computing (ICAC), Portsmouth, UK, 2–4 September 2021; pp. 1–6. [Google Scholar]
- Azar, A.T.; Ammar, H.H.; Ibrahim, Z.F.; Ibrahim, H.A.; Mohamed, N.A.; Taha, M.A. Implementation of PID Controller with PSO Tuning for Autonomous Vehicle. In Proceedings of the International Conference on Advanced Intelligent Systems and Informatics 2019, Cairo, Egypt, 26–28 October 2019; pp. 288–299. [Google Scholar]
- Max, G.; Vass, S.; Kiss, B. Development of Robust H-Infinity Steering Control System for Autonomous Vehicles. In Proceedings of the Vehicle and Automotive Engineering 2: Proceedings of the 2nd VAE2018, Miskolc, Hungary, 23–25 May 2018; pp. 393–402. [Google Scholar]
- Guo, J.; Luo, Y.; Li, K. Robust H-infinity Fault-Tolerant Lateral Control of Four-Wheel-Steering Autonomous Vehicles. Int. J. Automot. Technol. 2020, 21, 993–1000. [Google Scholar] [CrossRef]
- Li, S.E.; Gao, F.; Li, K.; Wang, L.Y.; You, K.; Cao, D. Robust Longitudinal Control of Multi-Vehicle Systems—A Distributed H-Infinity Method. IEEE Trans. Transp. Syst. 2017, 19, 2779–2788. [Google Scholar] [CrossRef]
- Park, M.; Kang, Y. Experimental Verification of a Drift Controller for Autonomous Vehicle Tracking: A Circular Trajectory using LQR Method. Int. J. Control Autom. Syst. 2021, 19, 404–416. [Google Scholar] [CrossRef]
- Guo, F.; Song, K.; Xie, H. Extended State Observer Based Linear Quadratic Regulator for the Path-Tracking of Self-driving Buses. In Proceedings of the 2021 5th CAA International Conference on Vehicular Control and Intelligence (CVCI), Tianjin, China, 29–31 October 2021; pp. 1–6. [Google Scholar]
- Gonschorek, R.; Bertram, T. Synthesis of a 2DOF Linear Quadratic Gaussian Position Control for a Steer-by-Wire System in Highly Automated Driving Applications. In Proceedings of the 2022 IEEE Intelligent Vehicles Symposium (IV), Aachen, Germany, 4–9 June 2022; pp. 58–63. [Google Scholar]
- Lee, K.; Jeon, S.; Kim, H.; Kum, D. Optimal Path Tracking Control of Autonomous Vehicle: Adaptive Full-State Linear Quadratic Gaussian (LQG) Control. IEEE Access 2019, 7, 109120–109133. [Google Scholar] [CrossRef]
- Peng, H.; Wang, W.; An, Q.; Xiang, C.; Li, L. Path Tracking and Direct Yaw Moment Coordinated Control based on Robust MPC with the Finite Time Horizon for Autonomous Independent-Drive Vehicles. IEEE Trans. Veh. Technol. 2020, 69, 6053–6066. [Google Scholar] [CrossRef]
- Wang, W.; Zhang, Y.; Yang, C.; Qie, T.; Ma, M. Adaptive Model Predictive Control-based Path Following Control for Four-Wheel Independent Drive Automated Vehicles. IEEE Trans. Int. Trans. Syst. 2021, 23, 14399–14412. [Google Scholar] [CrossRef]
- Chen, Y.; Chen, S.; Ren, H.; Gao, Z.; Liu, Z. Path Tracking and Handling Stability Control Strategy with Collision Avoidance for the Autonomous Vehicle under Extreme Conditions. IEEE Trans. Veh. Technol. 2020, 69, 14602–14617. [Google Scholar] [CrossRef]
- Pang, H.; Liu, N.; Hu, C.; Xu, Z. A Practical Trajectory Tracking Control of Autonomous Vehicles using Linear Time-Varying MPC Method. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2022, 236, 709–723. [Google Scholar] [CrossRef]
- Cheng, S.; Li, L.; Chen, X.; Wu, J. Model-Predictive-Control-based Path Tracking Controller of Autonomous Vehicle Considering Parametric Uncertainties and Velocity-Varying. IEEE Trans. Ind. Electr. 2020, 68, 8698–8707. [Google Scholar] [CrossRef]
- Liang, Z.; Zhao, J.; Liu, B.; Wang, Y.; Ding, Z. Velocity-based Path Following Control for Autonomous Vehicles to Avoid Exceeding Road Friction Limits using Sliding Mode Method. IEEE Trans. Int. Trans. Syst. 2020, 23, 1947–1958. [Google Scholar] [CrossRef]
- Tagne, G.; Talj, R.; Charara, A. Higher-Order Sliding Mode Control for Lateral Dynamics of Autonomous Vehicles, with Experimental Validation. In Proceedings of the 2013 IEEE Intelligent Vehicles Symposium (IV), Gold Coast, QLD, Australia, 23–26 October 2013; pp. 678–683. [Google Scholar]
- Wang, R.; Yin, G.; Jin, X. Robust Adaptive Sliding Mode Control for Nonlinear Four-Wheel Steering Autonomous Vehicles Path Tracking Systems. In Proceedings of the 2016 IEEE 8th International Power Electronics and Motion Control Conference (IPEMC-ECCE Asia), Hefei, China, 22–26 May 2016; pp. 2999–3006. [Google Scholar]
- Ferrara, A.; Incremona, G.P.; Regolin, E. Optimization-based Adaptive Sliding Mode Control with Application to Vehicle Dynamics Control. Int. J. Robust Nonlinear Control 2019, 29, 550–564. [Google Scholar] [CrossRef]
- Hu, C.; Wang, R.; Yan, F. Integral Sliding Mode-based Composite Nonlinear Feedback Control for Path Following of Four-Wheel Independently Actuated Autonomous Vehicles. IEEE Trans. Transp. Electrif. 2016, 2, 221–230. [Google Scholar] [CrossRef]
- Xu, D.; Shi, Y.; Ji, Z. Model-Free Adaptive Discrete-Time Integral Sliding-Mode-Constrained-Control for Autonomous 4WMV Parking Systems. IEEE Trans. Ind. Electr. 2017, 65, 834–843. [Google Scholar] [CrossRef]
- Bei, S.; Hu, H.; Li, B.; Tian, J.; Tang, H.; Quan, Z.; Zhu, Y. Research on the Trajectory Tracking of Adaptive Second-Order Sliding Mode Control Based on Super-Twisting. World Electr. Veh. J. 2022, 13, 141. [Google Scholar] [CrossRef]
- Rivera, J.; Garcia, L.; Mora, C.; Raygoza, J.J.; Ortega, S. Super-Twisting Sliding Mode in Motion Control Systems. Sliding Mode Control 2011, 1, 237–254. [Google Scholar]
- Kang, C.M.; Kim, W.; Lee, S.H.; Chung, C.C. Backstepping Control Method with Sliding Mode Observer for Autonomous Lane Keeping System. IFAC-PapersOnLine 2017, 50, 6989–6995. [Google Scholar] [CrossRef]
- Ao, D.; Huang, W.; Wong, P.K.; Li, J. Robust Backstepping Super-Twisting Sliding Mode Control for Autonomous Vehicle Path Following. IEEE Access 2021, 9, 123165–123177. [Google Scholar] [CrossRef]
- Norouzi, A.; Masoumi, M.; Barari, A.; Farrokhpour Sani, S. Lateral Control of an Autonomous Vehicle using Integrated BackStepping and Sliding Mode Controller. Proc. Inst. Mech. Eng. Part K J. Multi-Body Dyn. 2019, 233, 141–151. [Google Scholar] [CrossRef]
- Wang, P.; Gao, S.; Li, L.; Cheng, S.; Zhao, L. Automatic Steering Control Strategy for Unmanned Vehicles based on Robust Backstepping Sliding Mode Control Theory. IEEE Access 2019, 7, 64984–64992. [Google Scholar] [CrossRef]
- Wang, S.; Hui, Y.; Sun, X.; Shi, D. Neural Network Sliding Mode Control of Intelligent Vehicle Longitudinal Dynamics. IEEE Access 2019, 7, 162333–162342. [Google Scholar] [CrossRef]
- Sun, Z.; Zou, J.; He, D.; Man, Z.; Zheng, J. Collision-Avoidance Steering Control for Autonomous Vehicles using Neural Network-based Adaptive Integral Terminal Sliding Mode. J. Int. Fuzzy Syst. 2020, 39, 4689–4702. [Google Scholar] [CrossRef]
- Sun, Z.; Zou, J.; He, D.; Zhu, W. Path-Tracking Control for Autonomous Vehicles using Double-Hidden-Layer Output Feedback Neural Network Fast Nonsingular Terminal Sliding mode. Neural Comput. Appl. 2022, 34, 5135–5150. [Google Scholar] [CrossRef]
- Swain, S.K.; Rath, J.J.; Veluvolu, K.C. Neural Network based Robust Lateral Control for an Autonomous Vehicle. Electronics 2021, 10, 510. [Google Scholar] [CrossRef]
- Ji, X.; He, X.; Lv, C.; Liu, Y.; Wu, J. Adaptive-Neural-Network-based Robust Lateral Motion Control for Autonomous Vehicle at Driving Limits. Control Eng. Pract. 2018, 76, 41–53. [Google Scholar] [CrossRef]
- Negash, N.M.; Yang, J. Anticipation-based Autonomous Platoon Control Strategy with Minimum Parameter Learning Adaptive Radial Basis Function Neural Network Sliding Mode Control. SAE Int. J. Veh. Dyn. Stab. NVH 2022, 6, 247–265. [Google Scholar] [CrossRef]
- Chen, I.M.; Chan, C.Y. Deep Reinforcement Learning based Path Tracking Controller for Autonomous Vehicle. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2021, 235, 541–551. [Google Scholar] [CrossRef]
- Zhang, Y.; Sun, P.; Yin, Y.; Lin, L.; Wang, X. Human-like Autonomous Vehicle Speed Control by Deep Reinforcement Learning with Double Q-learning. In Proceedings of the 2018 IEEE Intelligent Vehicles Symposium (IV), Changshu, China, 26–30 June 2018; pp. 1251–1256. [Google Scholar]
- Ma, X.; Driggs-Campbell, K.; Kochenderfer, M.J. Improved Robustness and Safety for Autonomous Vehicle Control with Adversarial Reinforcement Learning. In Proceedings of the 2018 IEEE Intelligent Vehicles Symposium (IV), Changshu, China, 26–30 June 2018; pp. 1665–1671. [Google Scholar]
- Kwon, J.; Khalil, A.; Kim, D.; Nam, H. Incremental End-to-End Learning for Lateral Control in Autonomous Driving. IEEE Access 2022, 10, 33771–33786. [Google Scholar] [CrossRef]
- Chai, R.; Liu, D.; Liu, T.; Tsourdos, A.; Xia, Y.; Chai, S. Deep Learning-based Trajectory Planning and Control for Autonomous Ground Vehicle Parking Maneuver. IEEE Trans. Autom. Sci. Eng. 2020, 20, 1633–1647. [Google Scholar] [CrossRef]
- Tang, X.; Shi, L.; Wang, B.; Cheng, A. Weight Adaptive Path Tracking Control for Autonomous Vehicles based on PSO-BP Neural Network. Sensors 2022, 23, 412. [Google Scholar] [CrossRef] [PubMed]
- Huang, Z.; Liu, H.; Wu, J.; Lv, C. Differentiable Integrated Motion Prediction and Planning with Learnable Cost Function for Autonomous Driving. arXiv 2023, arXiv:2207.10422. [Google Scholar] [CrossRef] [PubMed]
- Wang, Z.; Huang, H.; Tang, J.; Meng, X.; Hu, L. Velocity Control in Car-Following Behavior with Autonomous Vehicles using Reinforcement Learning. Accid. Anal. Prev. 2022, 174, 106729. [Google Scholar] [CrossRef]
- Zhang, X.; Jiang, Y.; Lu, Y.; Xu, X. Receding-Horizon Reinforcement Learning Approach for Kinodynamic Motion Planning of Autonomous Vehicles. IEEE Trans. Intell. Veh. 2022, 7, 556–568. [Google Scholar] [CrossRef]
- Xiao, Y.; Zhang, X.; Xu, X.; Liu, X.; Liu, J. Deep Neural Networks with Koopman Operators for Modeling and Control of Autonomous Vehicles. IEEE Trans. Intell. Veh. 2022, 8, 135–146. [Google Scholar] [CrossRef]
- Shi, H.; Zhou, Y.; Wang, X.; Fu, S.; Gong, S.; Ran, B. A Deep Reinforcement Learning-based Distributed Connected Automated Vehicle Control under Communication Failure. Comput. Aided Civ. Infrastruct. Eng. 2022, 37, 2033–2051. [Google Scholar] [CrossRef]
- Geng, G.; Lu, S.; Duan, C.; Jiang, H.; Xiang, H. Design of Autonomous Vehicle Trajectory Tracking Controller based on Neural Network Predictive Control. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2023. [Google Scholar] [CrossRef]
- Han, H.G.; Ma, M.L.; Yang, H.Y.; Qiao, J.F. Self-Organizing Radial Basis Function Neural Network Using Accelerated Second-Order Learning Algorithm. Neurocomputing 2022, 469, 1–12. [Google Scholar] [CrossRef]
- Moreno, J.A.; Osorio, M. A Lyapunov Approach to Second-Order Sliding Mode Controllers and Observers. In Proceedings of the 2008 47th IEEE Conference on Decision and Control, Cancun, Mexico, 9–11 December 2008; pp. 2856–2861. [Google Scholar]
- Vt, S.E.; Shin, Y.C. Radial Basis Function Neural Network for Approximation and Estimation of Nonlinear Stochastic Dynamic Systems. IEEE Trans. Neural Netw. 1994, 5, 594–603. [Google Scholar]
- Jin, H.; Zhou, M. On the Road Friction Recognition based on the Driving Wheels Deceleration. In Proceedings of the 2014 IEEE Conference and Expo Transportation Electrification Asia-Pacific, Beijing, China, 31 August–3 September 2014; pp. 1–8. [Google Scholar]
- IPG CARMAKER. Available online: https://ipg-automotive.com/ (accessed on 26 August 2023).
- ISO 3888-1: 2018; Passenger Cars—Test Track for a Severe Lane-Change Manoeuvre—Part 1: Double Lane-Change. International Organization for Standardization: Geneva, Switzerland, 2018.























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Parameter | Value | Unit |
|---|---|---|---|
| Mass | 2108 | [kg] | |
| Distance of front axis and mass center | 1.47 | [m] | |
| Distance of rear axis and mass center | 1.5 | [m] | |
| Wheel tread | 1.96 | [m] | |
| Moment of inertia | 1585.3 | [kgm2] | |
| Front cornering stiffness (approximated) | 117,000 | [Ns/rad] | |
| Rear cornering stiffness (approximated) | 112,000 | [Ns/rad] |
| Division | Scenario | Road Coefficient | Symbol | Value |
|---|---|---|---|---|
| NN-STSMC | DLC and RPT | 1.0 and 0.6 | 0.01 | |
| 0.01 | ||||
| 0.002 | ||||
| 15 | ||||
| 15 | ||||
| STSMC | DLC and RPT | 1.0 | 5.5 | |
| 1.8 | ||||
| 0.002 | ||||
| 0.6 | 3.5 | |||
| 1.5 | ||||
| 0.001 | ||||
| CSMC | DLC | 1.0 | 10 | |
| 0.4 | ||||
| 0.6 | 5.5 | |||
| 0.4 | ||||
| RPT | 1.0 | 6.5 | ||
| 0.7 | ||||
| 0.6 | 85 | |||
| 0.7 |
| Division | Road Coefficient | RMS | Value | MAX | Value |
|---|---|---|---|---|---|
| NN-STSMC | 1.0 | 0.0017 | 0.0061 | ||
| 0.0509 | 0.4738 | ||||
| 0.6 | 0.0017 | 0.0070 | |||
| 0.0527 | 0.3890 | ||||
| STSMC | 1.0 | 0.0023 | 0.0078 | ||
| 0.0578 | 0.4295 | ||||
| 0.6 | 0.0025 | 0.0095 | |||
| 0.0607 | 0.3615 | ||||
| CSMC | 1.0 | 0.0035 | 0.0135 | ||
| 0.0549 | 0.3518 | ||||
| 0.6 | 0.0104 | 0.0396 | |||
| 0.0596 | 0.2928 |
| Division | Road Coefficient | Simulation Time | Execution Time |
|---|---|---|---|
| NN-STSMC | 1.0 | 15.07 (s) | 18.17 (s) |
| 0.6 | 15.08 (s) | 18.21 (s) | |
| STSMC | 1.0 | 15.07 (s) | 18.07 (s) |
| 0.6 | 15.08 (s) | 18.16 (s) | |
| CSMC | 1.0 | 15.07 (s) | 17.98 (s) |
| 0.6 | 15.09 (s) | 18.07 (s) |
| Division | Road Coefficient | RMS | Value | MAX | Value |
|---|---|---|---|---|---|
| NN-STSMC | 1.0 | 0.2033 | 0.0063 | ||
| 0.2542 | 1.0553 | ||||
| 0.6 | 0.2210 | 0.0068 | |||
| 0.2133 | 0.9024 | ||||
| STSMC | 1.0 | 0.2426 | 0.0066 | ||
| 0.2314 | 0.9513 | ||||
| 0.6 | 0.2426 | 0.0071 | |||
| 0.2342 | 0.8757 | ||||
| CSMC | 1.0 | 0.2433 | 0.0517 | ||
| 0.2430 | 0.9287 | ||||
| 0.6 | 0.2434 | 0.0600 | |||
| 0.2537 | 0.9101 |
| Division | Road Coefficient | Simulation Time | Execution Time |
|---|---|---|---|
| NN-STSMC | 1.0 | 15.24 (s) | 18.28 (s) |
| 0.6 | 15.25 (s) | 18.32 (s) | |
| STSMC | 1.0 | 15.24 (s) | 18.24 (s) |
| 0.6 | 15.25 (s) | 18.22 (s) | |
| CSMC | 1.0 | 15.24 (s) | 18.21 (s) |
| 0.6 | 15.26 (s) | 18.23 (s) |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kim, H.; Kee, S.-C. Neural Network Approach Super-Twisting Sliding Mode Control for Path-Tracking of Autonomous Vehicles. Electronics 2023, 12, 3635. https://doi.org/10.3390/electronics12173635
Kim H, Kee S-C. Neural Network Approach Super-Twisting Sliding Mode Control for Path-Tracking of Autonomous Vehicles. Electronics. 2023; 12(17):3635. https://doi.org/10.3390/electronics12173635
Chicago/Turabian StyleKim, Hakjoo, and Seok-Cheol Kee. 2023. "Neural Network Approach Super-Twisting Sliding Mode Control for Path-Tracking of Autonomous Vehicles" Electronics 12, no. 17: 3635. https://doi.org/10.3390/electronics12173635
APA StyleKim, H., & Kee, S. -C. (2023). Neural Network Approach Super-Twisting Sliding Mode Control for Path-Tracking of Autonomous Vehicles. Electronics, 12(17), 3635. https://doi.org/10.3390/electronics12173635