


Investigation of Oscillation and Resonance in the Renewable Integrated DC-Microgrid



 ,
,  and
and 
Abstract
:1. Introduction
- A comprehensive analytical model for investigating high-frequency oscillations and resonance has been developed. The impedance analysis and eigenvalue-based method are used simultaneously to identify the source of oscillation/instability in the DC microgrid.
- Most of the prior studies have considered a constant power load for the high-frequency and resonance assessment of DC microgrids. This work has considered the various types of loads in the DC microgrid and their impact on the overall high-frequency oscillations and resonance.
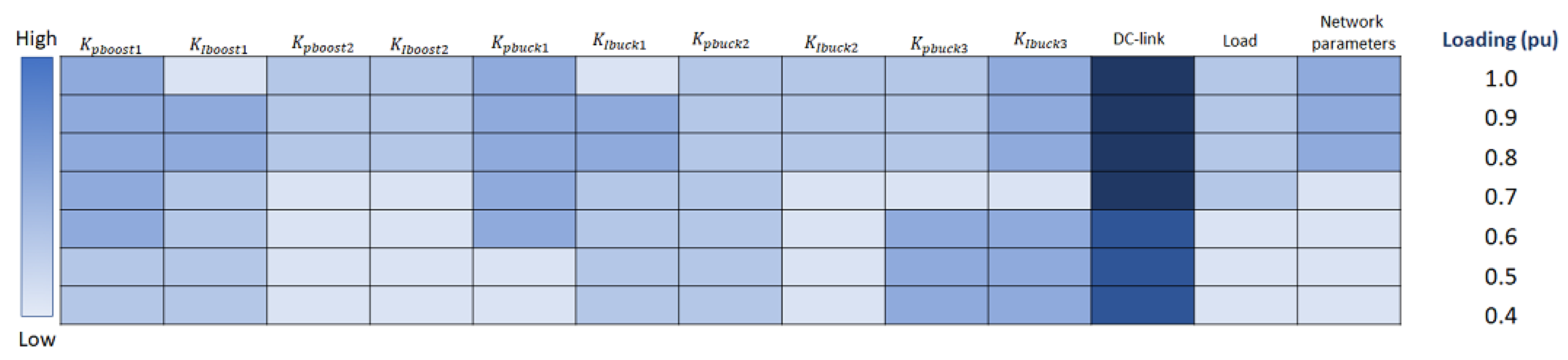
- A semi-global sensitivity analysis technique has been used to rank the most critical parameters of the DC microgrid, considering the cross-coupling of various parameters and uncertainties.
- Three control synthesis methods are described and compared in their suitability to the conventional PI controller in terms of high-frequency oscillations and resonance.
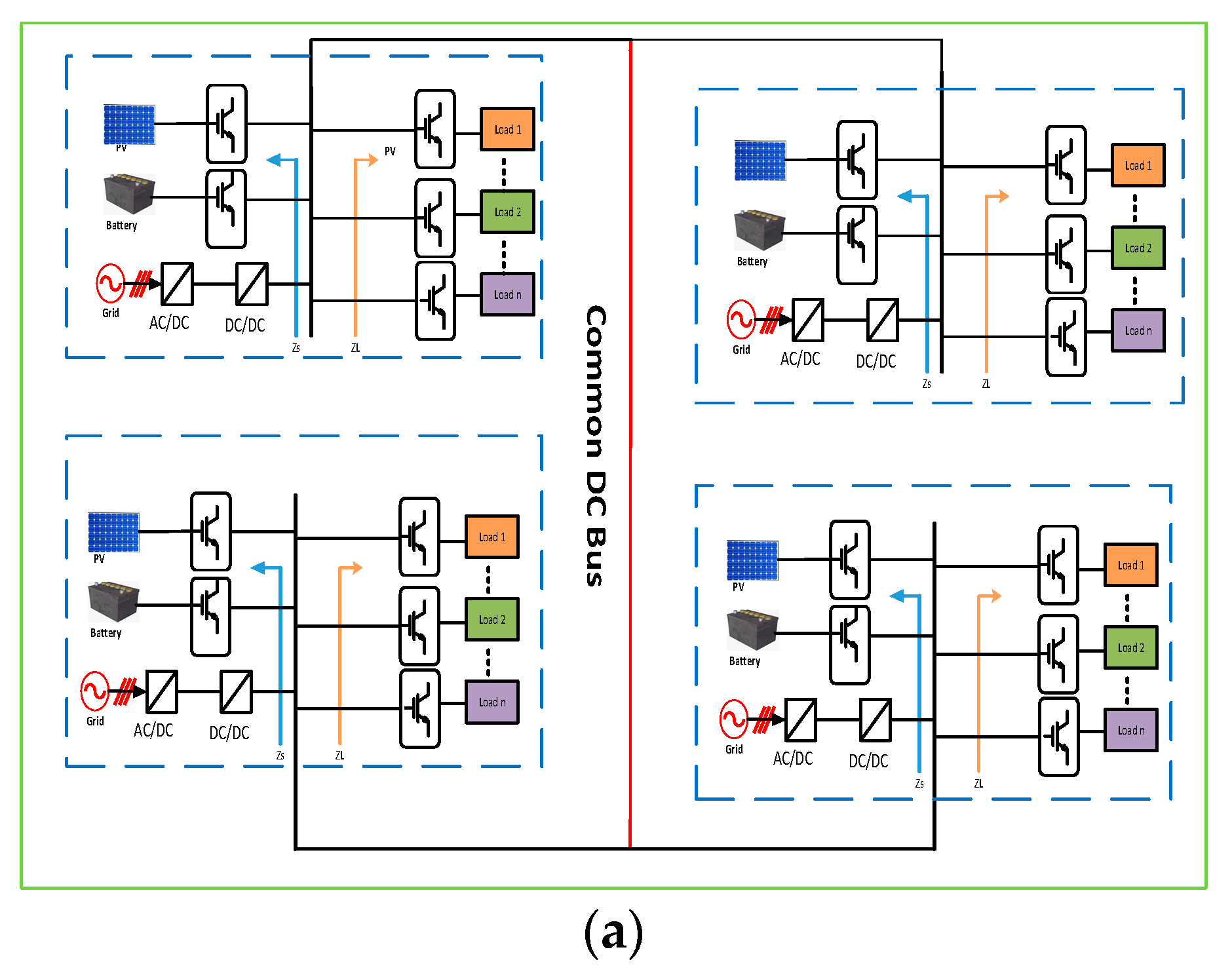
2. Oscillation Challenges in DCMG
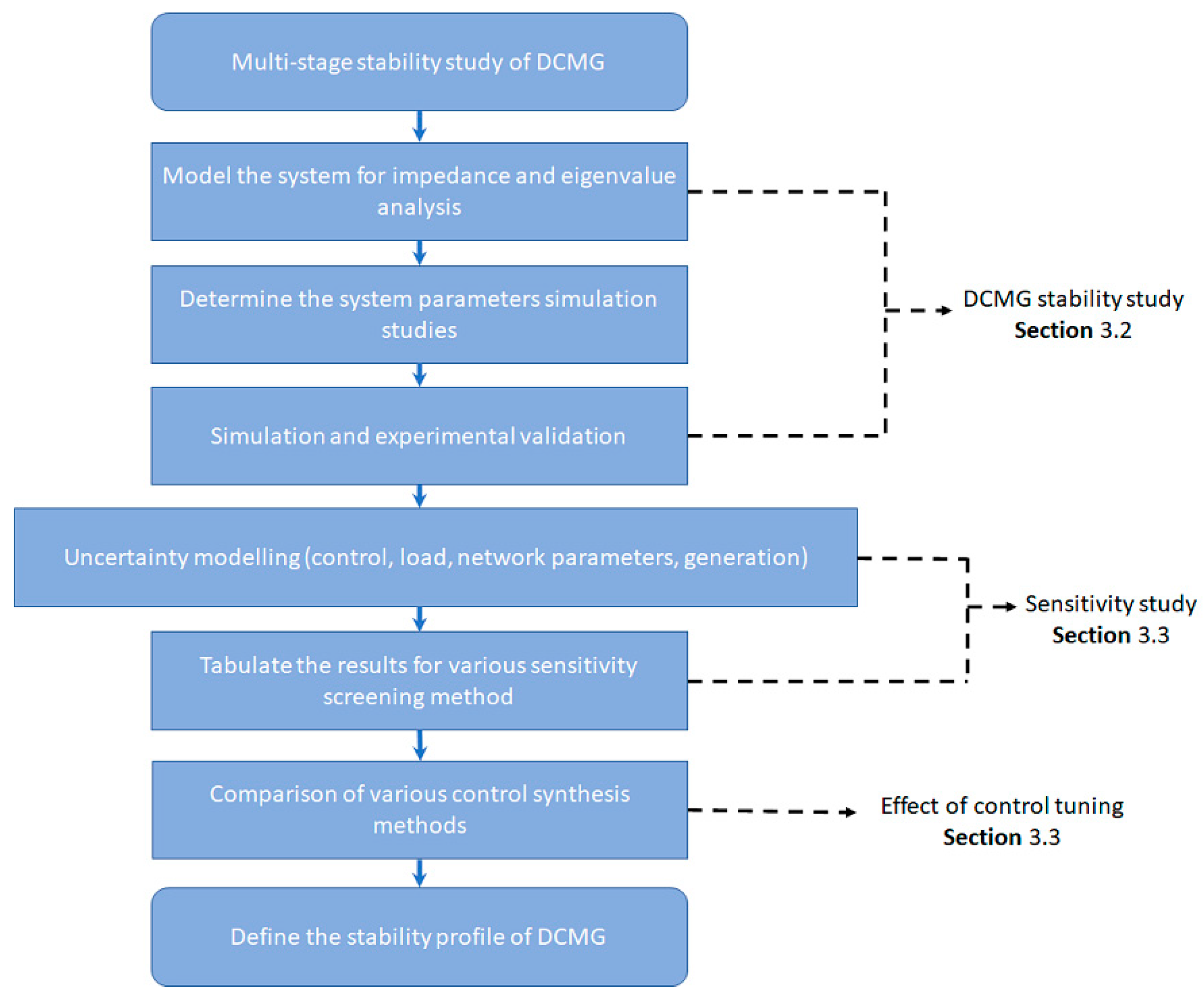
3. Methodology and Modelling
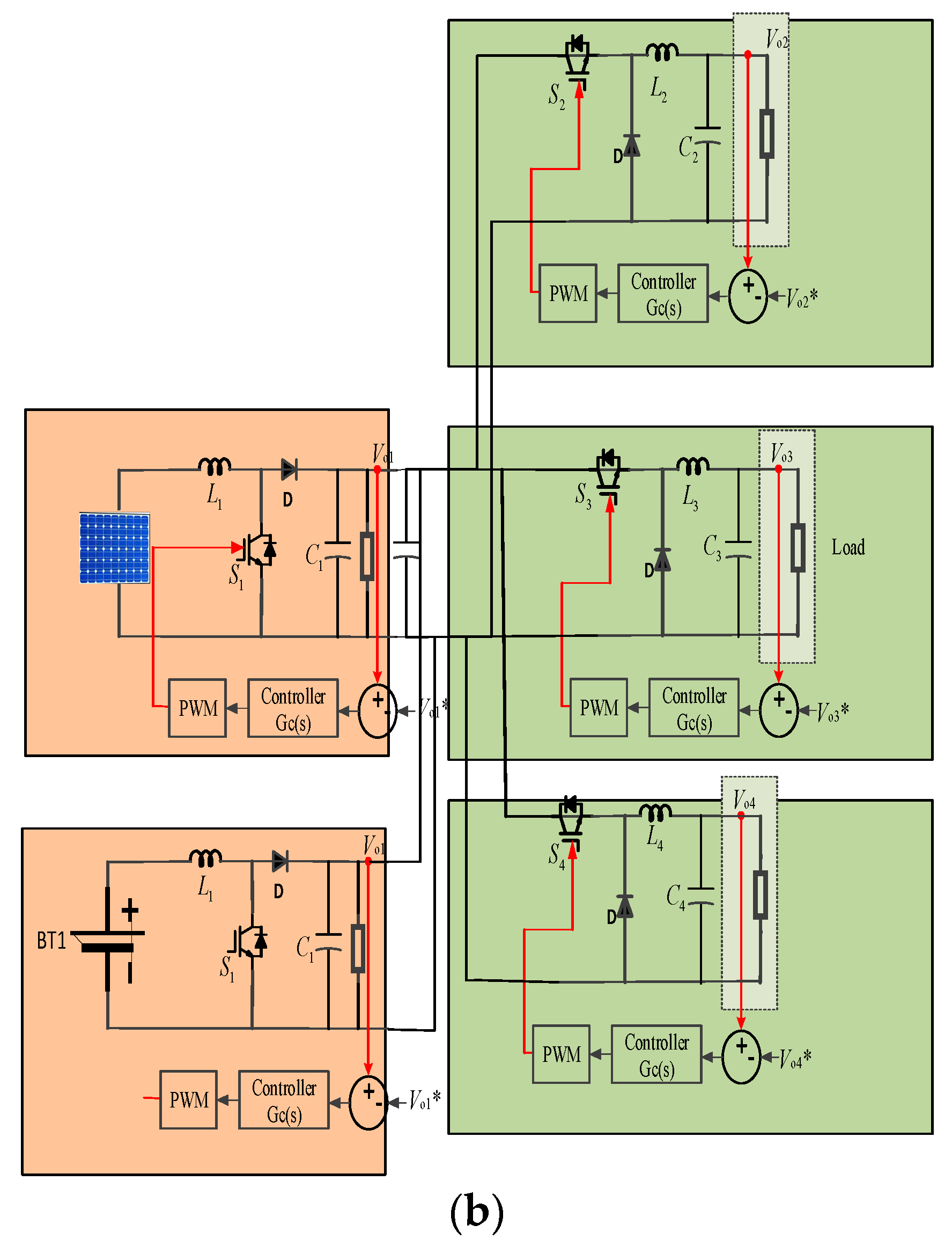
3.1. State Space Modelling
3.2. Analytical Expression for Impedance Scanning
3.3. Sensitivity Analysis
3.4. Overview of Control Tuning
4. Numerical Analysis and Discussion
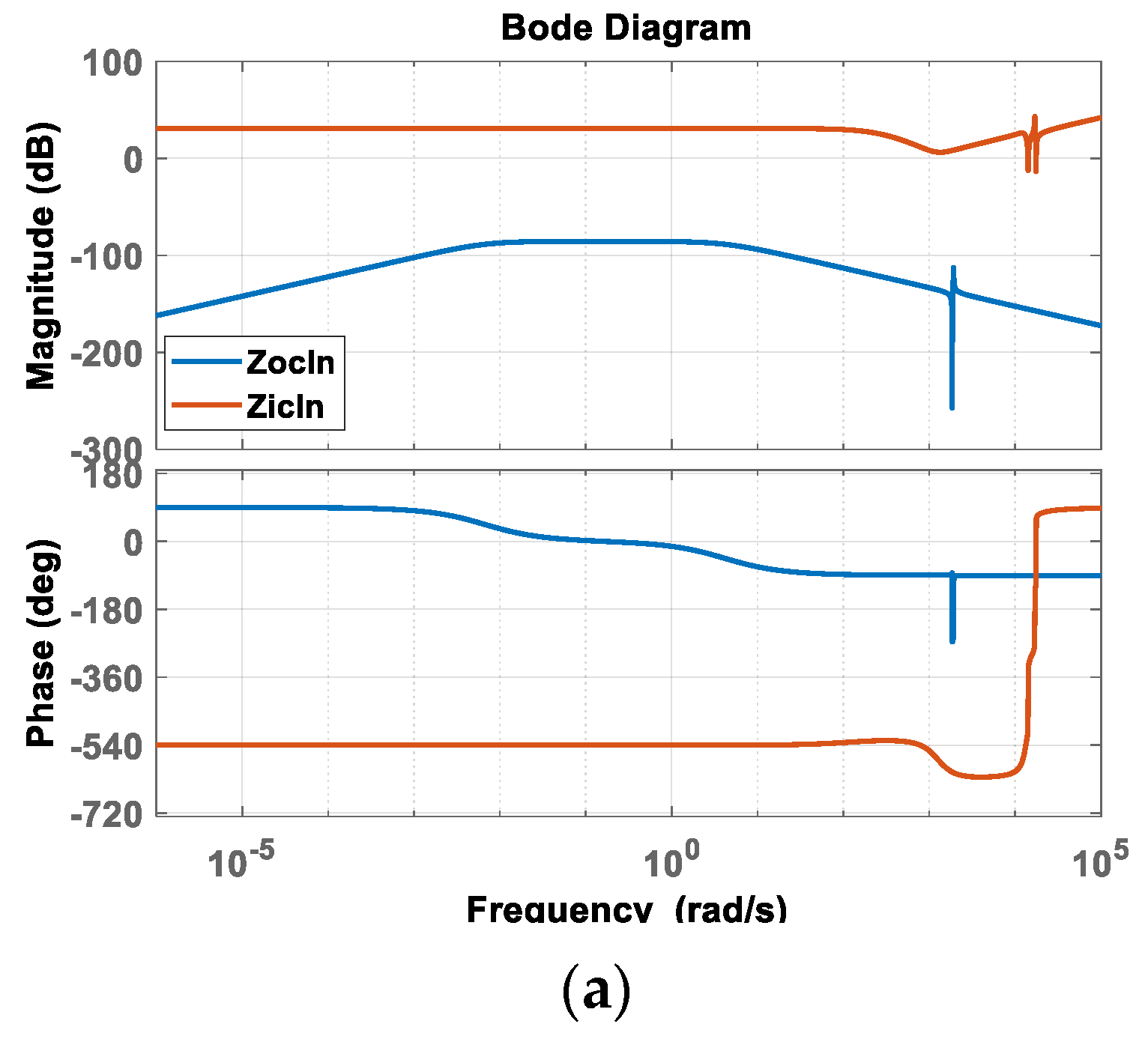
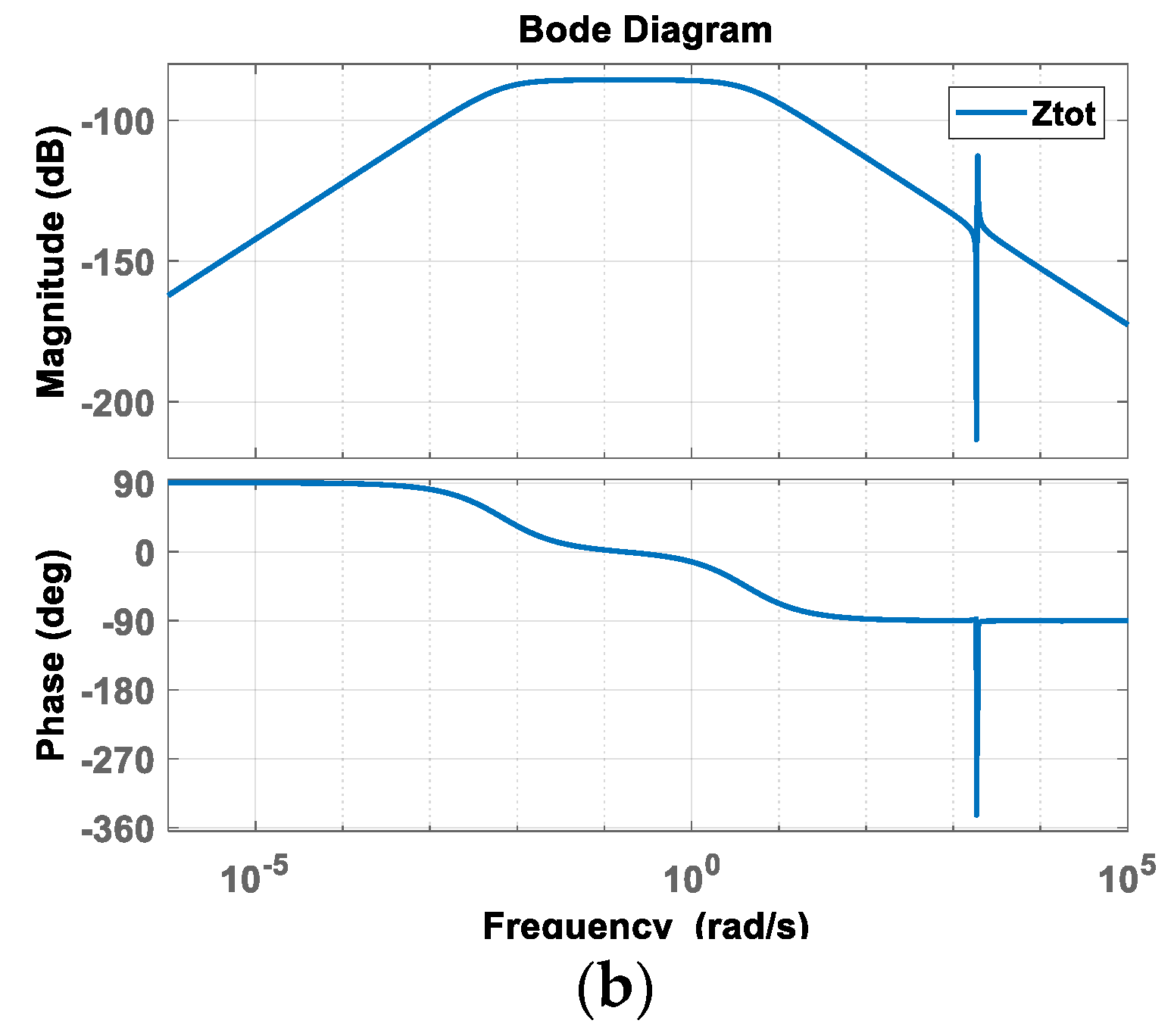
4.1. Impedance Analysis
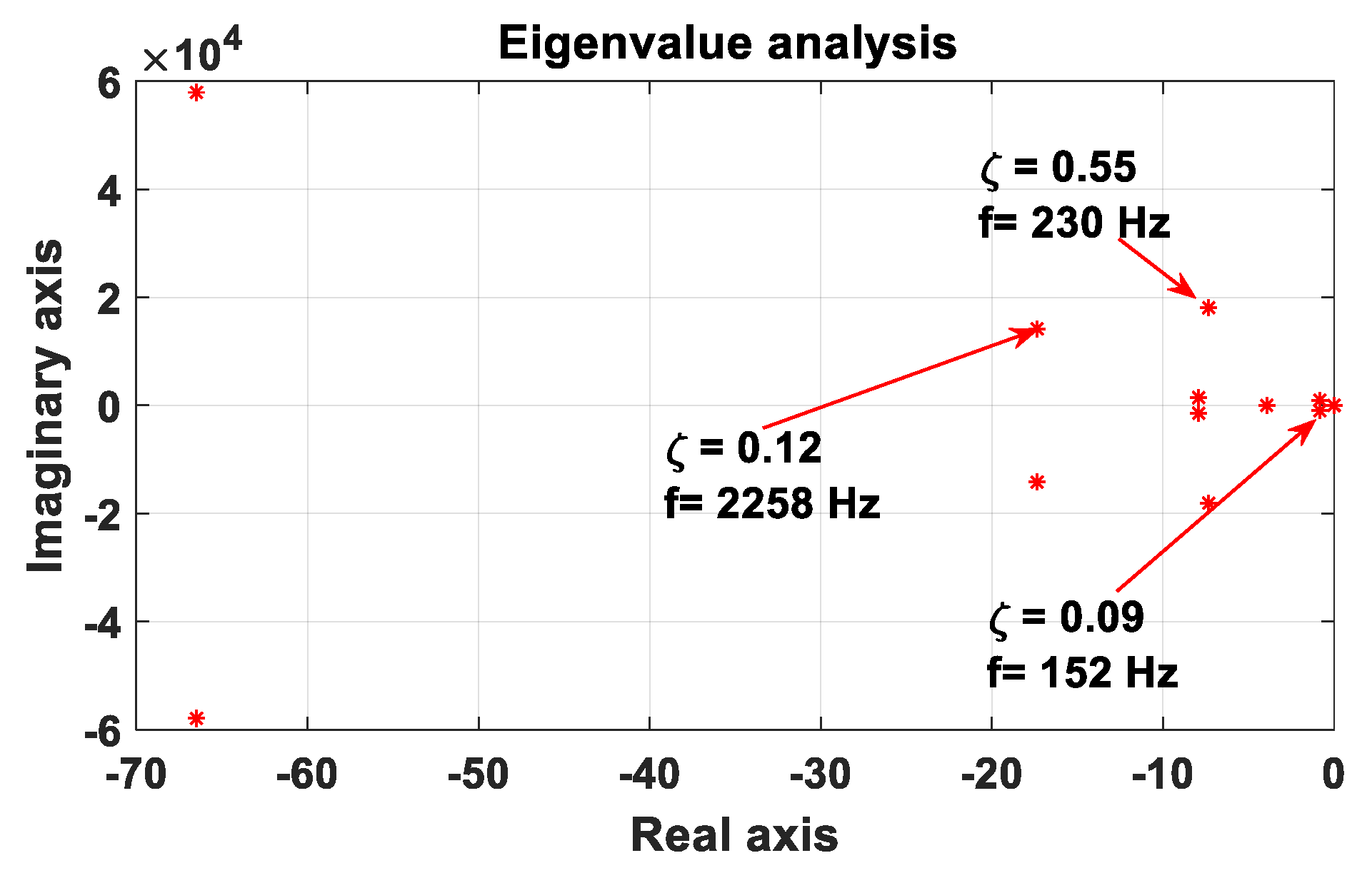
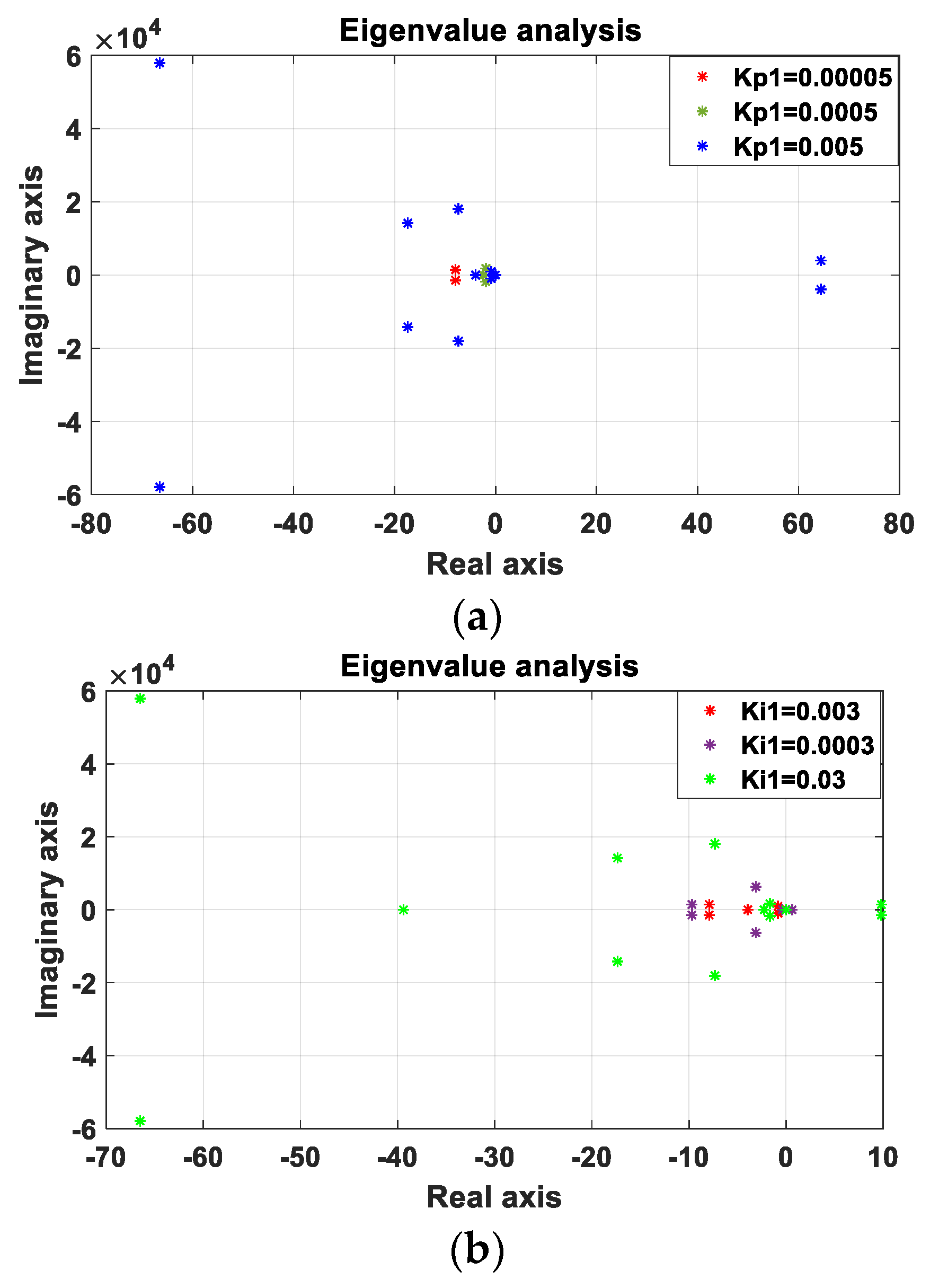
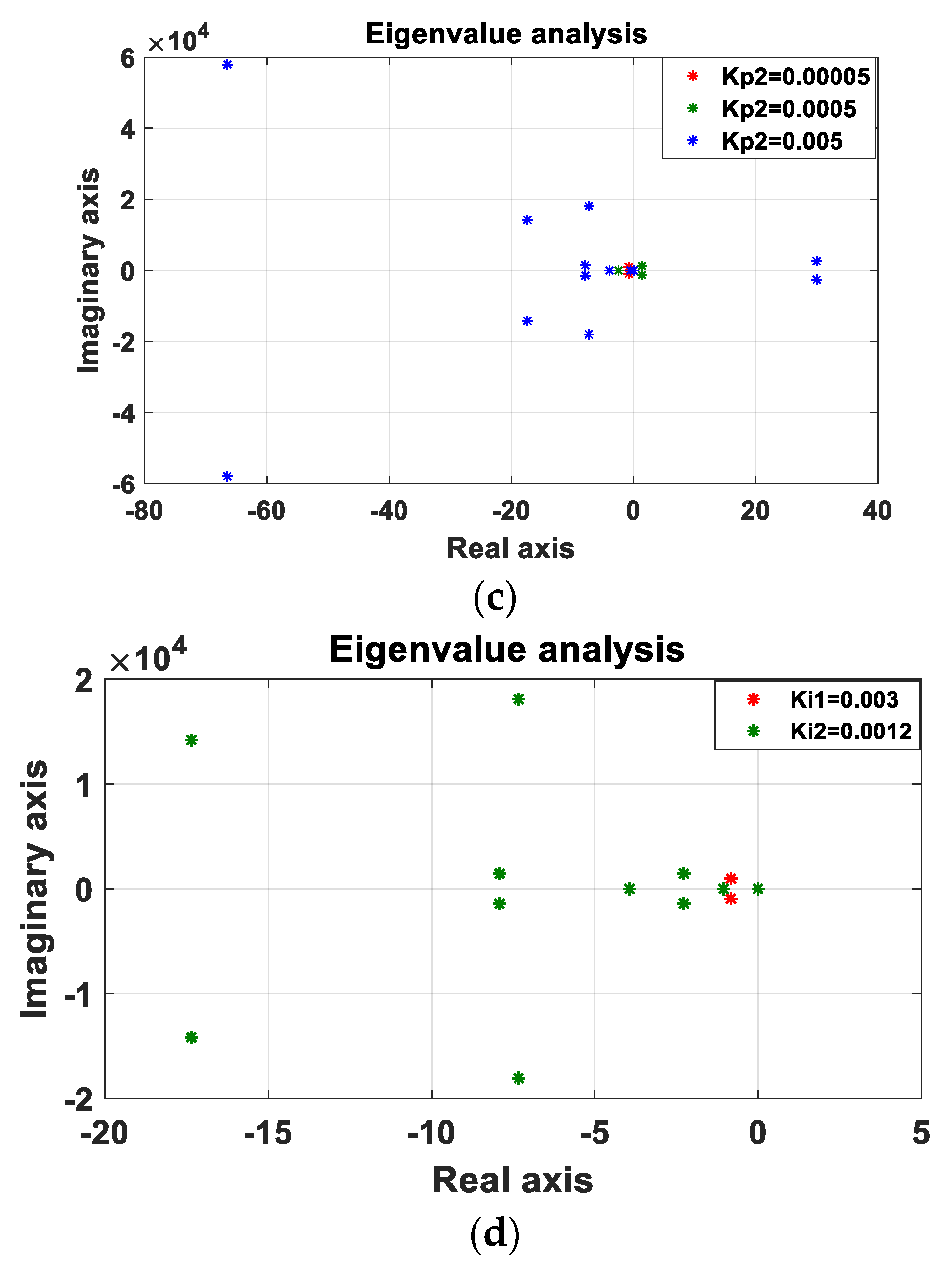
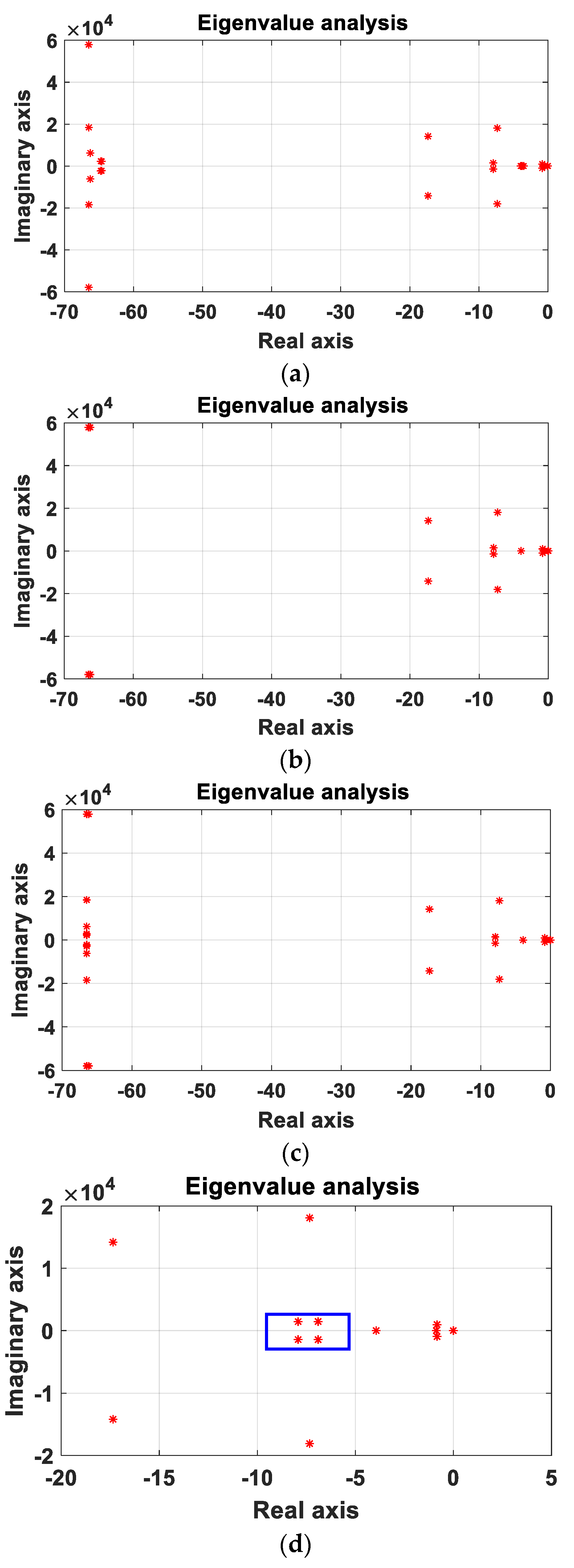
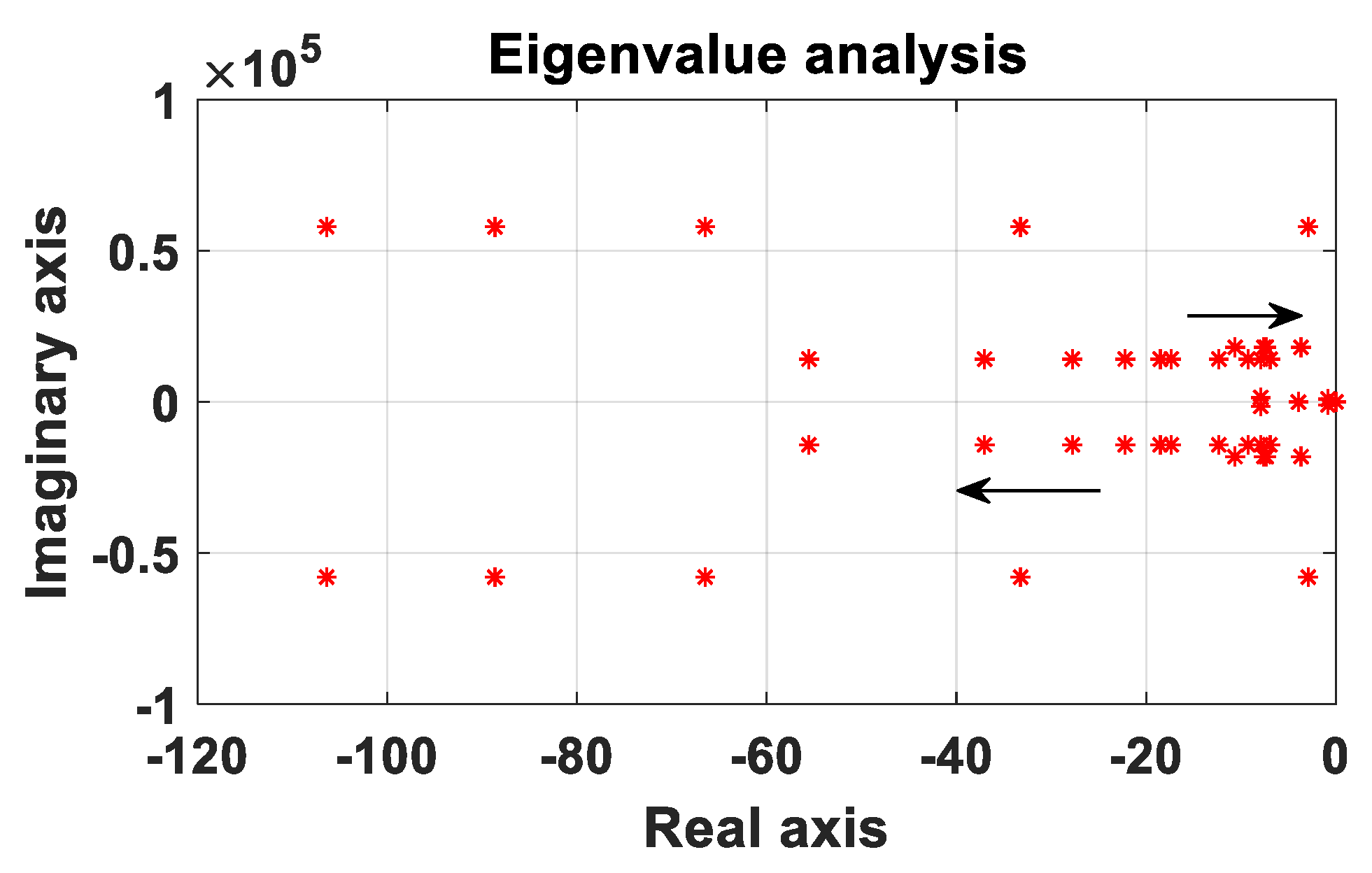
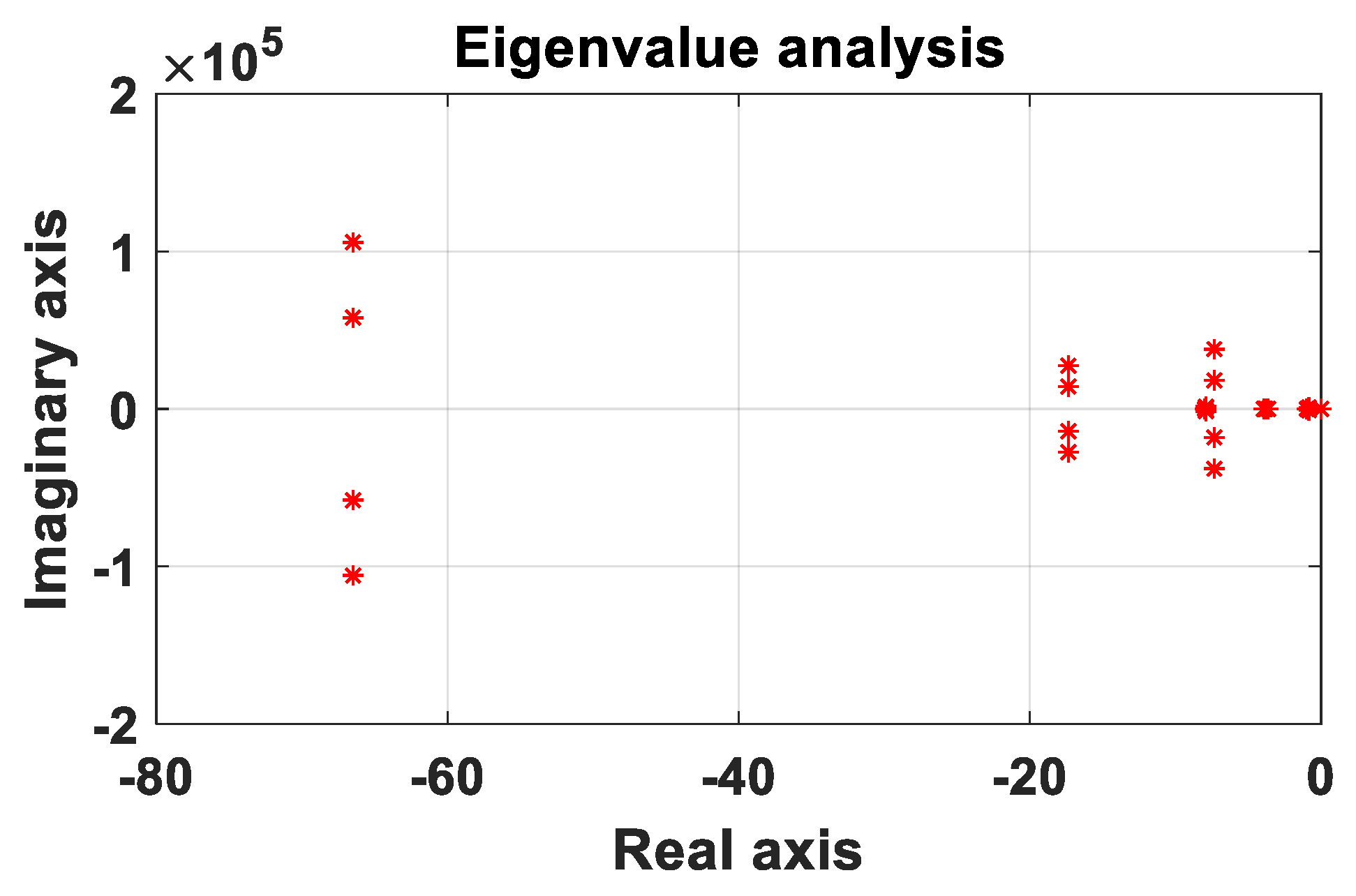
4.2. Eigenvalue Analysis
4.2.1. Case Study 1 (Parameter Variation in 12-kW Boost Converter)
4.2.2. Case Study 2 (Parameter Variation in Buck Converter)
4.2.3. Case Study 3 (Variation in DC-Link Capacitance)
4.2.4. Case Study 4 (Variation in Load Power)
4.2.5. Case Study 5 (Variation in Inductance Parameter)
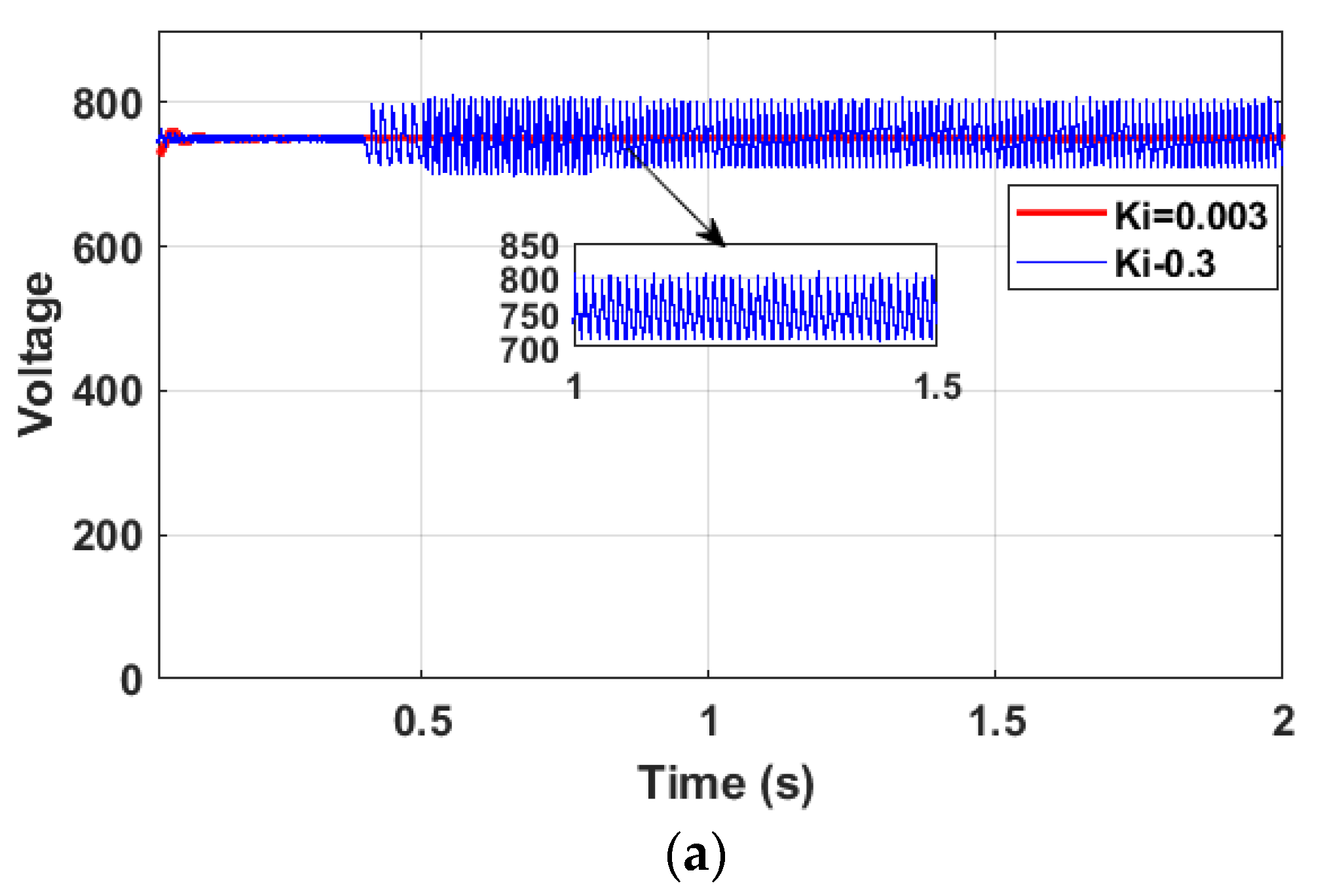
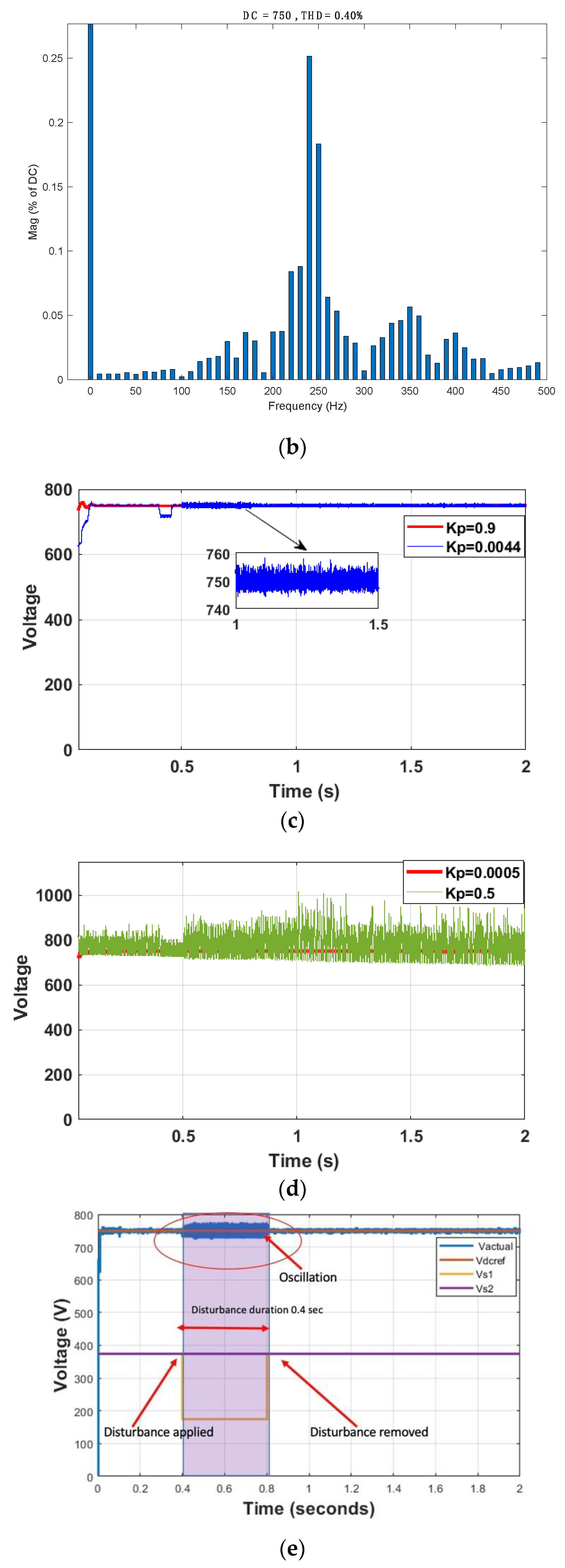
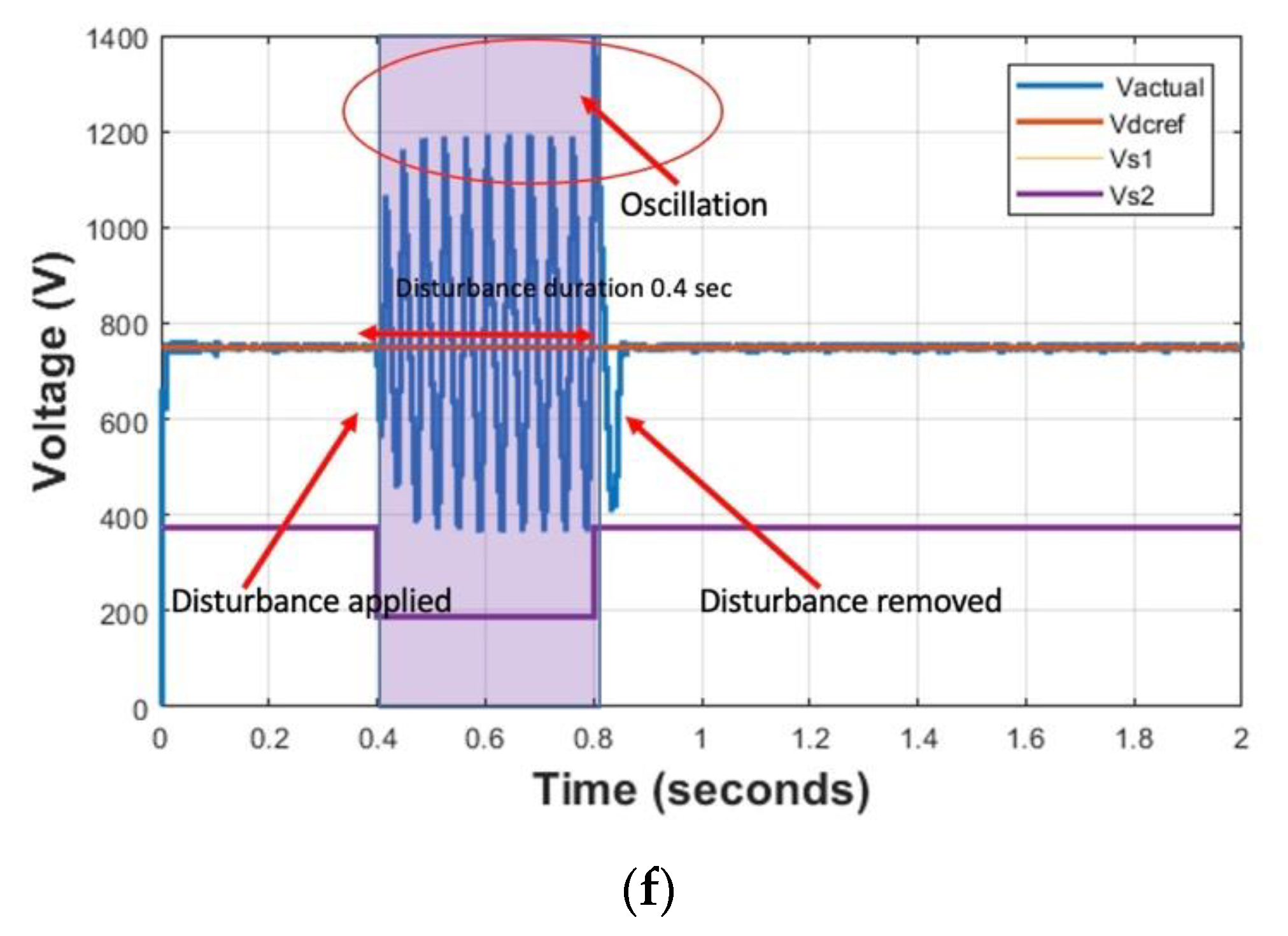
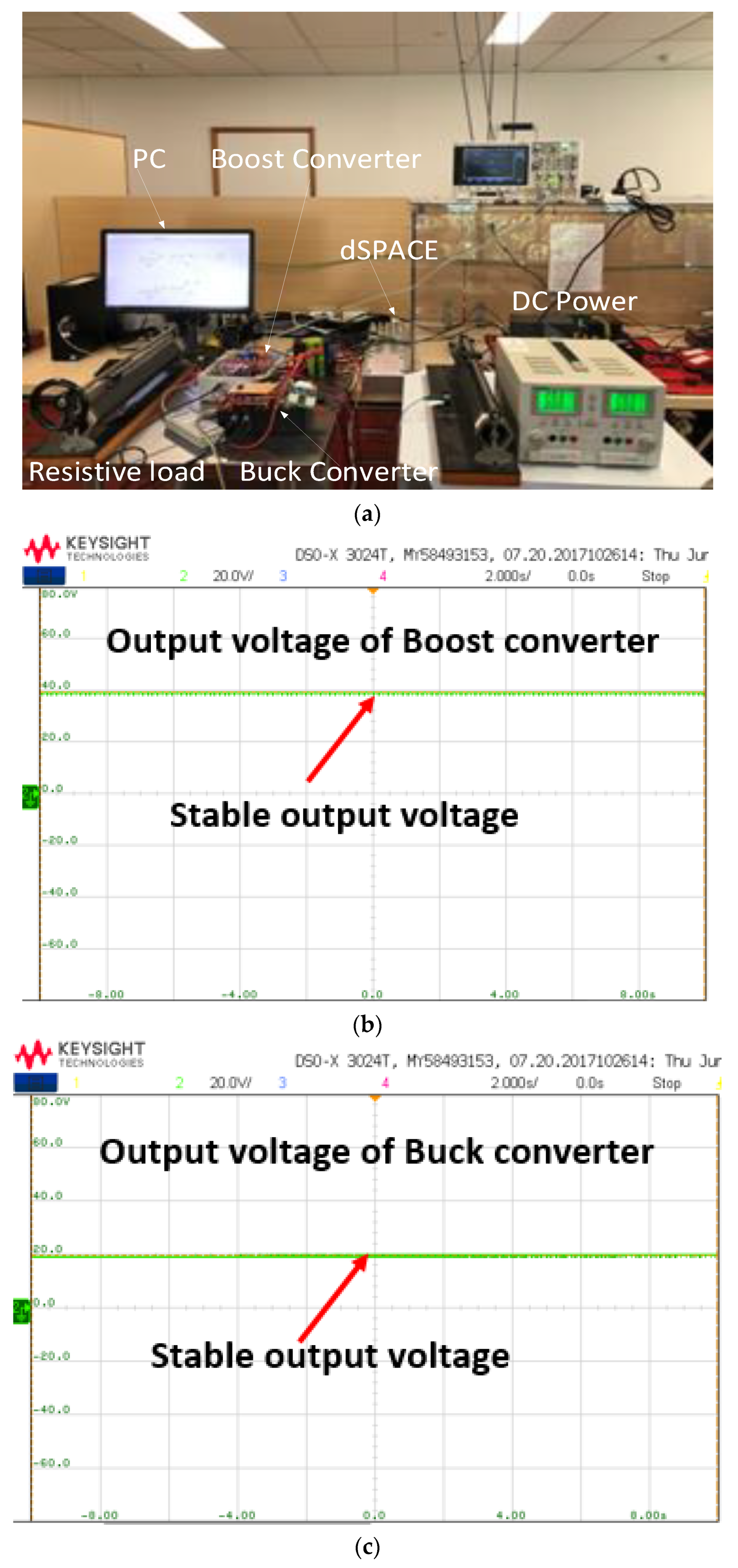
4.3. Time-Domain Simulations and Experimental Studies
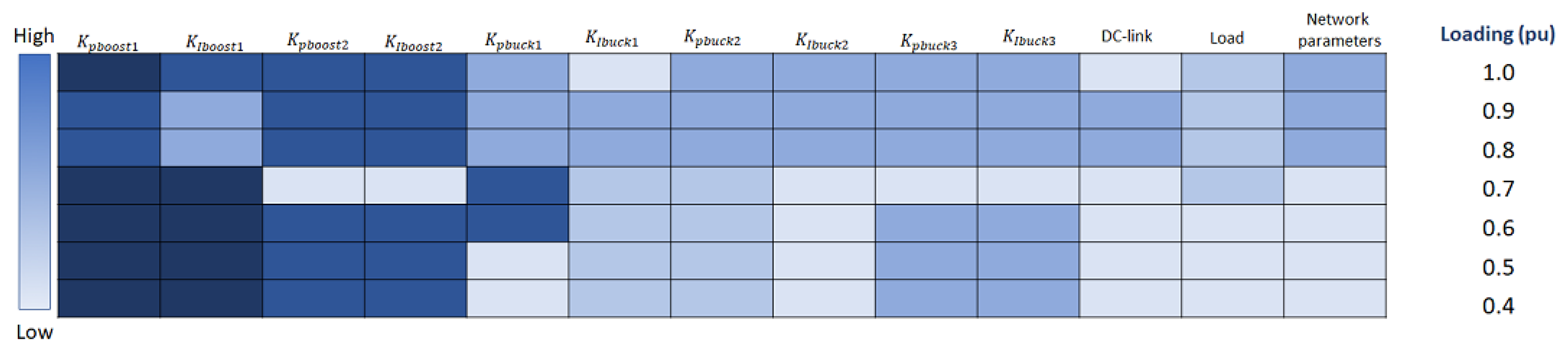
4.4. Critical Parameter Ranking
4.5. Control Performance Assessment
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Nomenclature
| Variables | |
| BESS | Battery energy storage system |
| DCMG | DC microgrid |
| EMI | Electromagnetic interference |
| EV | Electric vehicle |
| GM | Gain margin |
| HF | High frequency |
| HVDC | High-voltage DC |
| LF | Low frequency |
| LQR | Linear Quadratic Regulator |
| MVDC | Medium voltage DC |
| PI | Proportional integral |
| PID | Proportional integral derivative |
| PM | Phase margin |
| PV | Photovoltaic |
| PWM | Pulse-width modulated |
| RESs | Renewable energy sources |
| SSS | Small-signal stability |
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Symbol | Value |
|---|---|---|
| Boost converter source voltage | ||
| Boost converter inductor and capacitor | & | |
| Parasitic inductor resistor | ||
| Boost converter output voltage | ||
| DC link voltage | ||
| Switching frequency | ||
| Proportional and integral gain of PI controller in boost converter | ||
| Input voltage of buck converter | ||
| Buck converter output voltage | ||
| Boost converter inductor and capacitor | ||
| Proportional and integral gain of PI controller in buck converter | ||
| Switching frequency | ||
| Load | ||
| Rated output power |
| Converter | PI | LQR | IP | PI+clegg |
|---|---|---|---|---|
| 1 | Proportional: 0.9 Integral: 0.005 | Proportional: 0.0011 Integral: 1.73 | Proportional: 0.0013 Integral: 0.707 | Proportional: 0.0015 Integral: 1.25 |
| 2 | Proportional: 0.9 Integral: 0.005 | Proportional: 0.0011 Integral: 1.73 | Proportional: 0.0012 Integral: 0.707 | Proportional: 0.0012 Integral: 1.23 |
| 3 | Proportional: 0.9 Integral: 0.005 | Proportional: 0.0011 Integral: 1.73 | Proportional: 0.0011 Integral: 0.707 | Proportional: 0.0012 Integral: 1.22 |
References
- Amin, M.; Molinas, M. Non-parametric impedance based stability and controller bandwidth extraction from impedance measurements of HVDC-connected wind farms. arXiv 2017, arXiv:1704.04800. [Google Scholar]
- Amin, M.; Molinas, M. Small-signal stability assessment of power electronics based power systems: A discussion of impedance-and eigenvalue-based methods. IEEE Trans. Ind. Appl. 2017, 53, 5014–5030. [Google Scholar] [CrossRef]
- Hamzeh, M.; Ghazanfari, A.; Mohamed, Y.A.-R.I.; Karimi, Y. Modeling and design of an oscillatory current-sharing control strategy in DC microgrids. IEEE Trans. Ind. Electron. 2015, 62, 6647–6657. [Google Scholar] [CrossRef]
- Habibullah, M.; Mithulananthan, N.; Zare, F.; Alkaran, D.S. Investigation of power oscillation at common DC bus in DC grid. In Proceedings of the IEEE International Conference on Industrial Technology (ICIT), Melbourne, VIC, Australia, 13–15 February 2019; pp. 1695–1700. [Google Scholar]
- Habibullah, M.; Mithulananthan, N.; Zare, F.; Sharma, R. Impact of control systems on power quality at common DC bus in DC grid. In Proceedings of the IEEE PES GTD Grand International Conference and Exposition Asia (GTD Asia), Bangkok, Thailand, 19–23 March 2019; pp. 411–416. [Google Scholar]
- Augustine, S.; Quiroz, J.E.; Reno, M.J.; Brahma, S. DC Microgrid Protection: Review and Challenges; Sandia National Lab. (SNL-NM): Albuquerque, NM, USA, 2018. [Google Scholar]
- Planas, E.; Andreu, J.; Gárate, J.I.; De Alegría, I.M.; Ibarra, E. AC and DC technology in microgrids: A review. Renew. Sustain. Energy Rev. 2015, 43, 726–749. [Google Scholar] [CrossRef]
- Whaite, S.; Grainger, B.; Kwasinski, A. Power quality in DC power distribution systems and microgrids. Energies 2015, 8, 4378–4399. [Google Scholar] [CrossRef] [Green Version]
- Kumar, D.; Zare, F.; Ghosh, A. DC microgrid technology: System architectures, AC grid interfaces, grounding schemes, power quality, communication networks, applications, and standardizations aspects. IEEE Access 2017, 5, 12230–12256. [Google Scholar] [CrossRef]
- Beheshtaein, S.; Cuzner, R.M.; Forouzesh, M.; Savaghebi, M.; Guerrero, J.M. DC microgrid protection: A comprehensive review. IEEE J. Emerg. Sel. Top. Power Electron. 2019. [Google Scholar] [CrossRef]
- Augustine, S.; Reno, M.J.; Brahma, S.M.; Lavrova, O. Fault current control and protection in a standalone DC microgrid using adaptive droop and current derivative. IEEE J. Emerg. Sel. Top. Power Electron. 2020, 9, 2529–2539. [Google Scholar] [CrossRef]
- Bayati, N.; Hajizadeh, A.; Soltani, M. Impact of faults and protection methods on DC microgrids operation. In Proceedings of the IEEE International Conference on Environment and Electrical Engineering and IEEE Industrial and Commercial Power Systems Europe (EEEIC/I & CPS Europe), Palermo, Italy, 12–15 June 2018; pp. 1–6. [Google Scholar]
- Pourmohammd, M.; Toulabi, M.; Rayati, M.; Khajehoddin, S.A. Load type impacts on the stability and robustness of DC microgrids. Int. J. Electr. Power Energy Syst. 2022, 140, 108036. [Google Scholar] [CrossRef]
- Zhang, Z.; Yang, X.; Zhao, S.; Wu, D.; Cao, J.; Gao, M.; Zheng, G.; Wang, Z. Large signal stability of islanded DC microgrids with multiple types of loads. Int. J. Electr. Power Energy Syst. 2022, 143, 108450. [Google Scholar] [CrossRef]
- He, B.; Chen, W.; Hu, H.; Zhan, D.; Zhang, C. Small signal stability analysis and criterion of triple stage cascaded DC system. IEEE J. Emerg. Sel. Top. Power Electron. 2022, 10, 2576–2586. [Google Scholar] [CrossRef]
- Lin, G.; Li, W.Z.Y.; Liu, J.; Wang, S.; Wang, P. Comparative analysis on the stability mechanism of droop control and VID control in DC microgrid. Chin. J. Electr. Eng. 2021, 7, 37–46. [Google Scholar] [CrossRef]
- Chen, P.; Zhao, W.; Chen, X.; Zhao, W.; Chen, X.; Jiang, J. An impedance based parameter design method for active damping of load converter station in MTDC distribution. J. Mod. Power Syst. Clean Energy 2022, 10, 1423–1435. [Google Scholar] [CrossRef]
- Hasan, K.; Preece, R.; Milanovic, J. Priority ranking of critical uncertainties affecting small-signal stability using sensitivity analysis techniques. IEEE Trans. Power Syst. 2017, 32, 2629–2639. [Google Scholar] [CrossRef] [Green Version]
- Fatah, R.; Hasan, K.; Preece, R. Comparative ranking of critical uncertainties affecting the stability of mixed AC/DC system. In Proceedings of the Power System Computational Conference (PSCC), Dublin, Ireland, 11–15 June 2018; pp. 1–6. [Google Scholar]
- Habibullah, M.; Mithulananthan, N.; Bhumkittipich, K.; Amin, M. A comprehensive investigation on high-frequency oscillation in DC microgrid. IEEE Access 2021, 9, 54850–54861. [Google Scholar] [CrossRef]
- Habibullah, M.; Bhumkittipich, K.; Mithulananthan, N.; Sharma, R.; Zare, F. Damping oscillation and removing resonance in a RE based DC microgrids. IEEE Access 2021, 9, 163516–163525. [Google Scholar] [CrossRef]
- Vijayakumari, A. Design of Microgrids. In Smart Microgrids; CRC Press: Boca Raton, FL, USA, 2020; pp. 13–117. [Google Scholar]
- Farrokhabadi, M.; Cañizares, C.A.; Simpson-Porco, J.W.; Nasr, E.; Fan, L.; Mendoza-Araya, P.A.; Tonkoski, R.; Tamrakar, U.; Hatziargyriou, N.; Lagos, D.; et al. Microgrid stability definitions, analysis, and examples. IEEE Trans. Power Systems 2019, 35, 13–29. [Google Scholar] [CrossRef]
- Carpintero-Rentería, M.; Santos-Martín, D.; Guerrero, J.M. Microgrids literature review through a layer’s structure. Energies 2019, 12, 4381. [Google Scholar] [CrossRef] [Green Version]
- Laaksonen, H. Technical Solutions for Low-Voltage Microgrid Concept. PhD Dissertation, The University of Vaasa, Vaasa, Finland, 2011. [Google Scholar]
- Abdelgawad, H.; Sood, V.K. A comprehensive review on microgrid architectures for distributed generation. In Proceedings of the 2019 IEEE Electrical Power and Energy Conference (EPEC), Montreal, QC, Canada, 16–18 October 2019; pp. 1–8. [Google Scholar]
- Anderson, P.M.; Agrawal, B.L.; Van Ness, J.E. Subsynchronous Resonance in Power Systems; John Wiley & Sons: Hoboken, NJ, USA, 1999. [Google Scholar]
- Padiyar, K. Analysis of Subsynchronous Resonance in Power Systems; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2012. [Google Scholar]
- Egwebe, A.M.; Fazeli, M.; Igic, P.; Holland, P.M. Implementation and stability study of dynamic droop in islanded microgrids. IEEE Trans. Energy Convers. 2016, 31, 821–832. [Google Scholar] [CrossRef] [Green Version]
- Setiadi, H.; Krismanto, A.U.; Mithulananthan, N.; Hossain, M. Modal interaction of power systems with high penetration of renewable energy and BES systems. Int. J. Electr. Power Energy Syst. 2018, 97, 385–395. [Google Scholar] [CrossRef]
- Wu, G.; Sun, H.; Zhao, B.; Xu, S.; Zhang, X.; Egea-Alvarez, A.; Wang, S.; Li, G.; Li, Y.; Zhou, X. A low-frequency converter-driven oscillations in weak grids: Explanation and damping improvement. IEEE Trans. Power Syst. 2021, 36, 5944–5947. [Google Scholar] [CrossRef]
- Banos, A.; Barreiro, A. Reset Control Systems; Springer Science and Business Media: Berlin, Germany, 2011. [Google Scholar]
- Li, C.; Wang, S.; Colas, F.; Liang, J. Dominant instability mechanism of VSI connecting to a very weak grid. IEEE Trans. Power Syst. 2022, 37, 828–831. [Google Scholar] [CrossRef]



















| Reference | Detailed Load Model | Sensitivity Analysis | Key Parameter Identification | Control Method |
|---|---|---|---|---|
| [13] | ✓ | ✓ | ✕ | ✓ |
| [14] | ✓ | ✓ | ✕ | ✕ |
| [15] | ✕ | ✓ | ✕ | ✕ |
| [16] | ✕ | ✓ | ✕ | ✕ |
| [17] | ✓ | ✓ | ✕ | ✕ |
| [20] | ✕ | ✓ | ✕ | ✕ |
| [21] | ✕ | ✕ | ✕ | ✓ |
| This work | ✓ | ✓ | ✓ | ✓ |
| Parameter | Symbol | Value |
|---|---|---|
| Rated power of the simulated system | 20 kW | |
| Rated power of boost converter 1 | 12 kW | |
| Rated power of boost converter 2 | 8 kW | |
| Rated power of buck converter 1 | 10 kW | |
| Rated power of buck converter 2 | 5 kW | |
| Rated power of buck converter 3 | 1 kW | |
| Boost converter source voltage | 375 V | |
| Boost converter output voltage | 750 V | |
| DC link voltage | 750 V | |
| Switching frequency of boost converters | 20 kHz | |
| Switching frequency of buck converter | 10 kHz | |
| 20 kHz | ||
| 20 kHz | ||
| Input voltage of buck converter | 750 V | |
| Buck converter output voltage | 400 V |
| Boost Converter 1 | Boost Converter 2 | ||
|---|---|---|---|
| Vs = 375 V | L = 157 µH | Vs = 400 V | L = 147 µH |
| V0 = 750 V | R = 47 Ω | V0 = 750 V | R = 70 Ω |
| D = 0.5 (no unit) | C = 1000 µF | D = 0.5 (no unit) | C = 1000 µF |
| Kp = 0.005 pu | Ki = 0.003 pu | Kp = 0.005 pu | Ki = 0.003 pu |
| Parameters | Converter 1 | Converter 2 | Converter 3 |
|---|---|---|---|
| Input voltage (V) | 750 | 750 | 750 |
| Output voltage (V) | 400 | 400 | 400 |
| Inductance (H) | 0.00428 | 0.0044 | 0.0033 |
| Resistance (ohm) | 16 | 145 | 147 |
| Duty cycle | 0.5 | 0.5 | 0.5 |
| Proportional gain (pu) | 0.9 | 0.9 | 0.9 |
| Integral gain (pu) | 0.005 | 0.005 | 0.005 |
| Critical Mode | Damping (%) | f (Hz) | Associated Mode | Remarks |
|---|---|---|---|---|
| −0.83 ± j953 | 0.09 | 151 | Controller | Boost converter |
| −7.91 ± j1443 | 0.55 | 230 | Controller | Boost converter |
| −7.33 ± j18,080 | 0.04 | 2878 | Controller | Buck converter |
| −66.48 ± j57,931 | 0.11 | 9224 | Controller | Buck converter |
| −17.36 ± j14,184 | 0.12 | 2258 | Controller | Buck converter |
| Load Type | Damping of Mode 1 | Damping of Mode 2 | Damping of Mode 3 | Damping of Mode 4 | Damping of Mode 5 |
|---|---|---|---|---|---|
| Constant P | 0.091 | 0.56 | 0.041 | 0.112 | 0.121 |
| Constant I | 0.092 | 0.55 | 0.038 | 0.111 | 0.122 |
| Constant Z | 0.093 | 0.55 | 0.039 | 0.113 | 0.122 |
| ZIP | 0.091 | 0.54 | 0.041 | 0.114 | 0.121 |
| Ranking | OAT | Morris | Pearson |
|---|---|---|---|
| 1 | |||
| 2 | |||
| 3 | |||
| 4 | DC-link |
| Mode | Damping with PI | Damping with PI+clegg | Damping with IP | Damping with LQR |
|---|---|---|---|---|
| 1 | 0.091 | 0.122 | 0.105 | 0.11 |
| 2 | 0.551 | 0.593 | 0.573 | 0.57 |
| 3 | 0.041 | 0.071 | 0.055 | 0.054 |
| 4 | 0.112 | 0.134 | 0.123 | 0.115 |
| 5 | 0.122 | 0.151 | 0.134 | 0.125 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Habibullah, M.; Mithulananthan, N.; Shah, R.; Islam, M.R.; Muyeen, S.M. Investigation of Oscillation and Resonance in the Renewable Integrated DC-Microgrid. Electronics 2023, 12, 1574. https://doi.org/10.3390/electronics12071574
Habibullah M, Mithulananthan N, Shah R, Islam MR, Muyeen SM. Investigation of Oscillation and Resonance in the Renewable Integrated DC-Microgrid. Electronics. 2023; 12(7):1574. https://doi.org/10.3390/electronics12071574
Chicago/Turabian StyleHabibullah, Mohammad, Nadarajah Mithulananthan, Rakibuzzaman Shah, Md Rabiul Islam, and S. M. Muyeen. 2023. "Investigation of Oscillation and Resonance in the Renewable Integrated DC-Microgrid" Electronics 12, no. 7: 1574. https://doi.org/10.3390/electronics12071574
APA StyleHabibullah, M., Mithulananthan, N., Shah, R., Islam, M. R., & Muyeen, S. M. (2023). Investigation of Oscillation and Resonance in the Renewable Integrated DC-Microgrid. Electronics, 12(7), 1574. https://doi.org/10.3390/electronics12071574