
Smartphone-Based Indoor Localization Systems: A Systematic Literature Review



Abstract
:1. Introduction
1.1. Existing Survey Articles
1.2. Motivation and Contributions
- This study presents a systematic analysis of the accomplishments achieved in previous studies for smartphone-based indoor localization by using a systematic review protocol.
- This study presents a concise overview of the motivation for using the various techniques in indoor localization as well as the challenges and recommendations that set the path for future research endeavors.
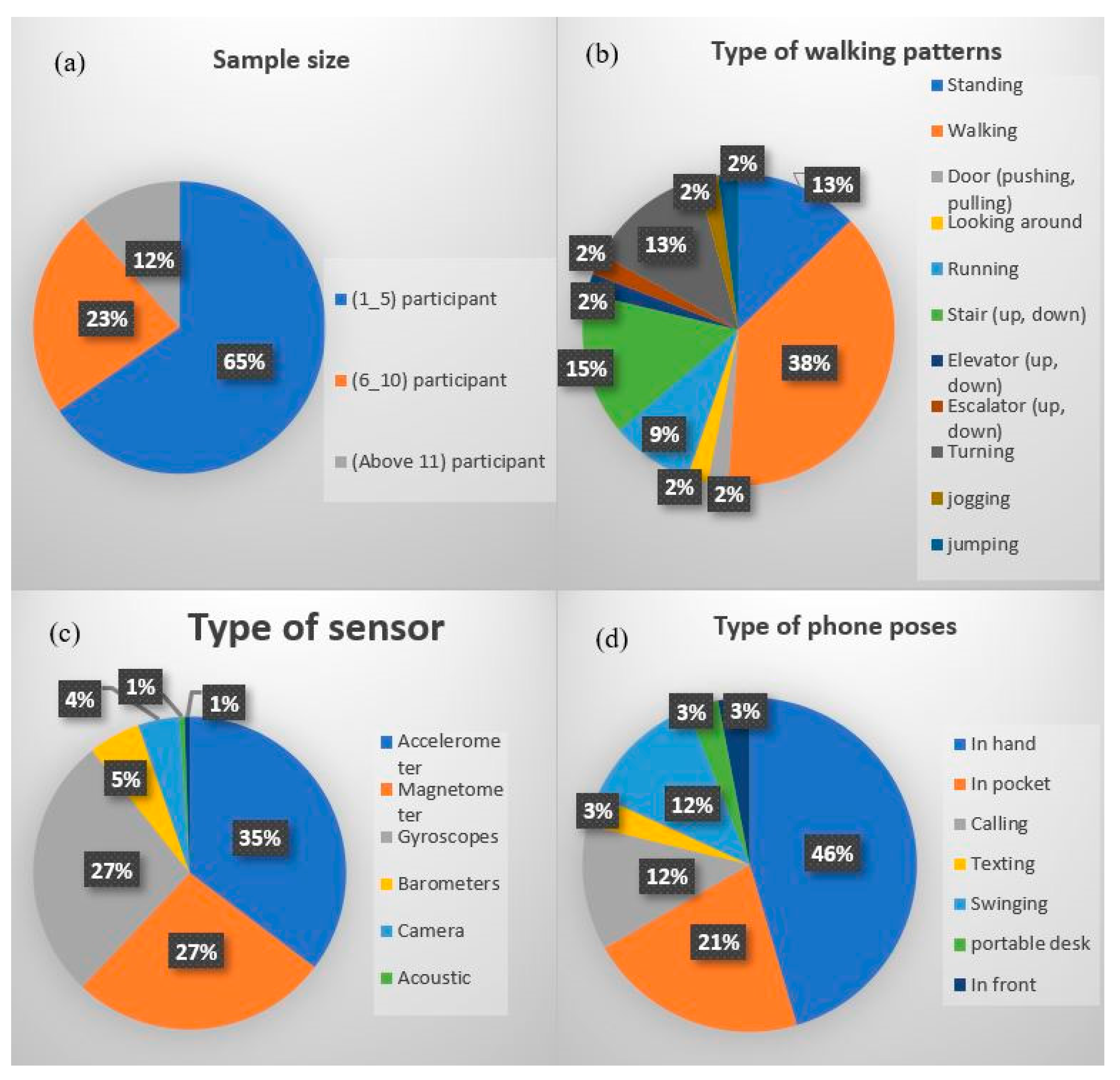
- This study presents a substantial analysis section that records crucial information about the sample size of participants, types of walking patterns, sensors, and phone poses that are related to the work.
- A list of limitations and future directions is provided for researchers who are interested in exploring walking patterns and recognition.
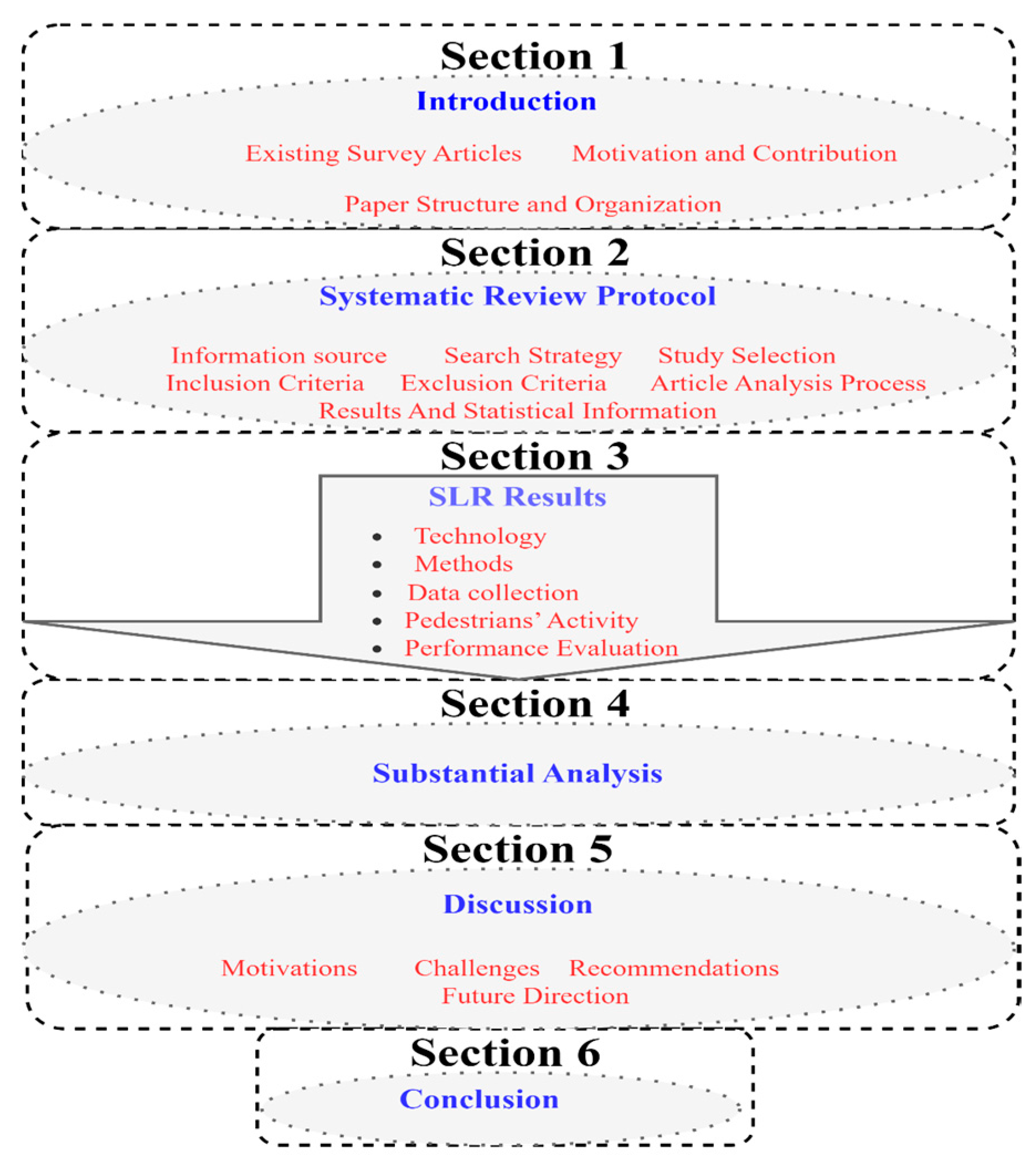
1.3. Paper Structure and Organization
2. Systematic Review Protocol
2.1. Research Questions
- What technologies and methods were used in previous studies for indoor localization based on smartphones, excluding marker-based or AR marker-based approaches?
- What are the challenges of indoor localization based on a smartphone?
- What are the walking patterns and phone poses for pedestrian activity?
- What sample sizes were applied in previous studies?
- What sensor types were used in the experiments in previous studies?
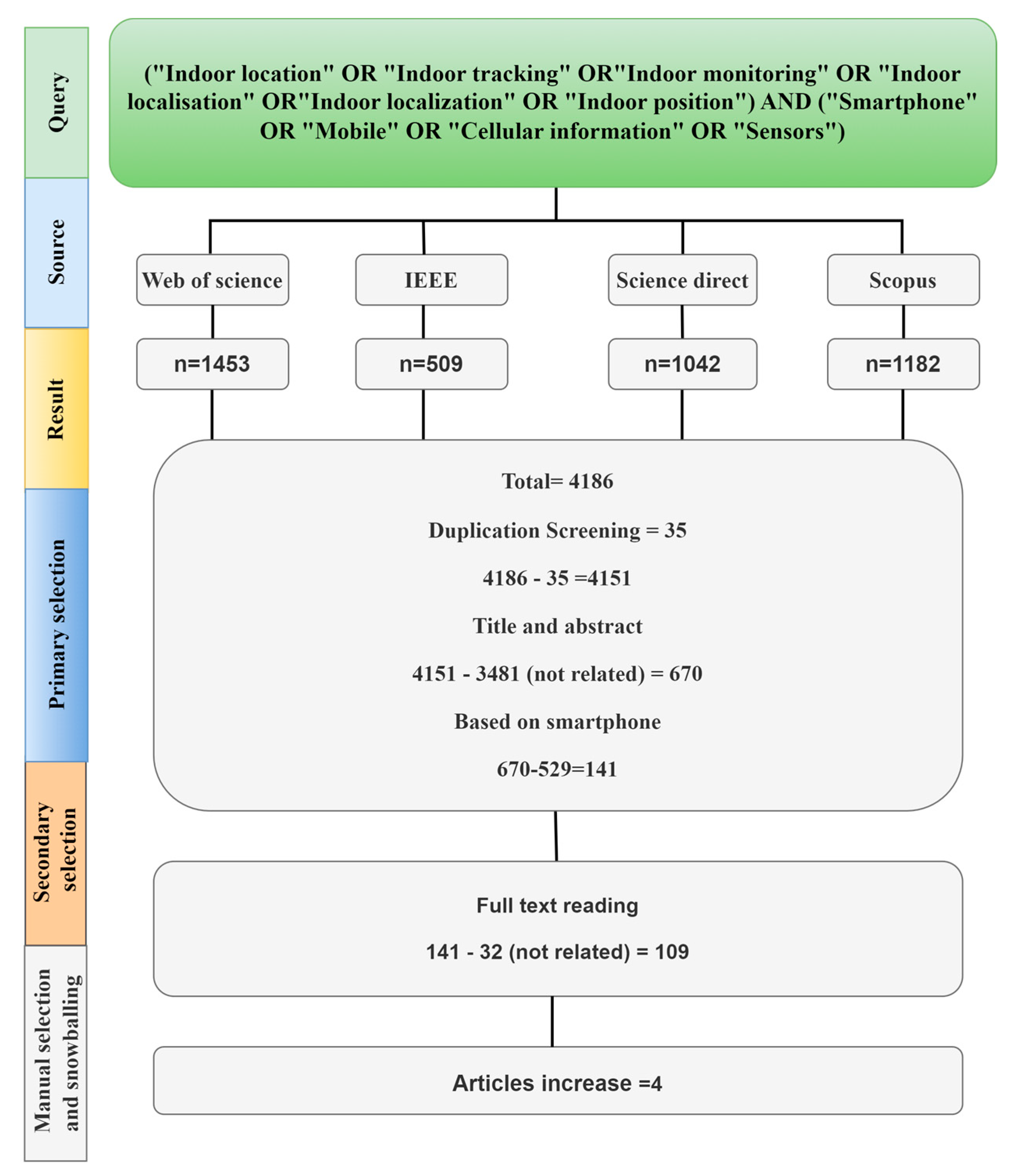
2.2. Information Source
2.3. Search Strategy
2.4. Study Selection
2.5. Inclusion Criteria
- (a)
- Articles or conference papers published in English-language journals.
- (b)
- The main focus is on indoor localization based on smartphones.
- (c)
- Reviewing and surveying indoor localization techniques to identify location.
- (d)
- Developing indoor localization techniques using smartphone-based systems with related experience.
2.6. Exclusion Criteria
- Articles not written in the English language.
- The publication is either a book chapter or another type of article.
- Duplicate articles.
- Articles unrelated to the topic area and topics that deviate from indoor localization using smartphone-based systems.
- Articles focusing on marker-based or AR marker-based approaches for indoor localization using smartphones.
2.7. Article Analysis Process
2.8. Results and Statistical Information
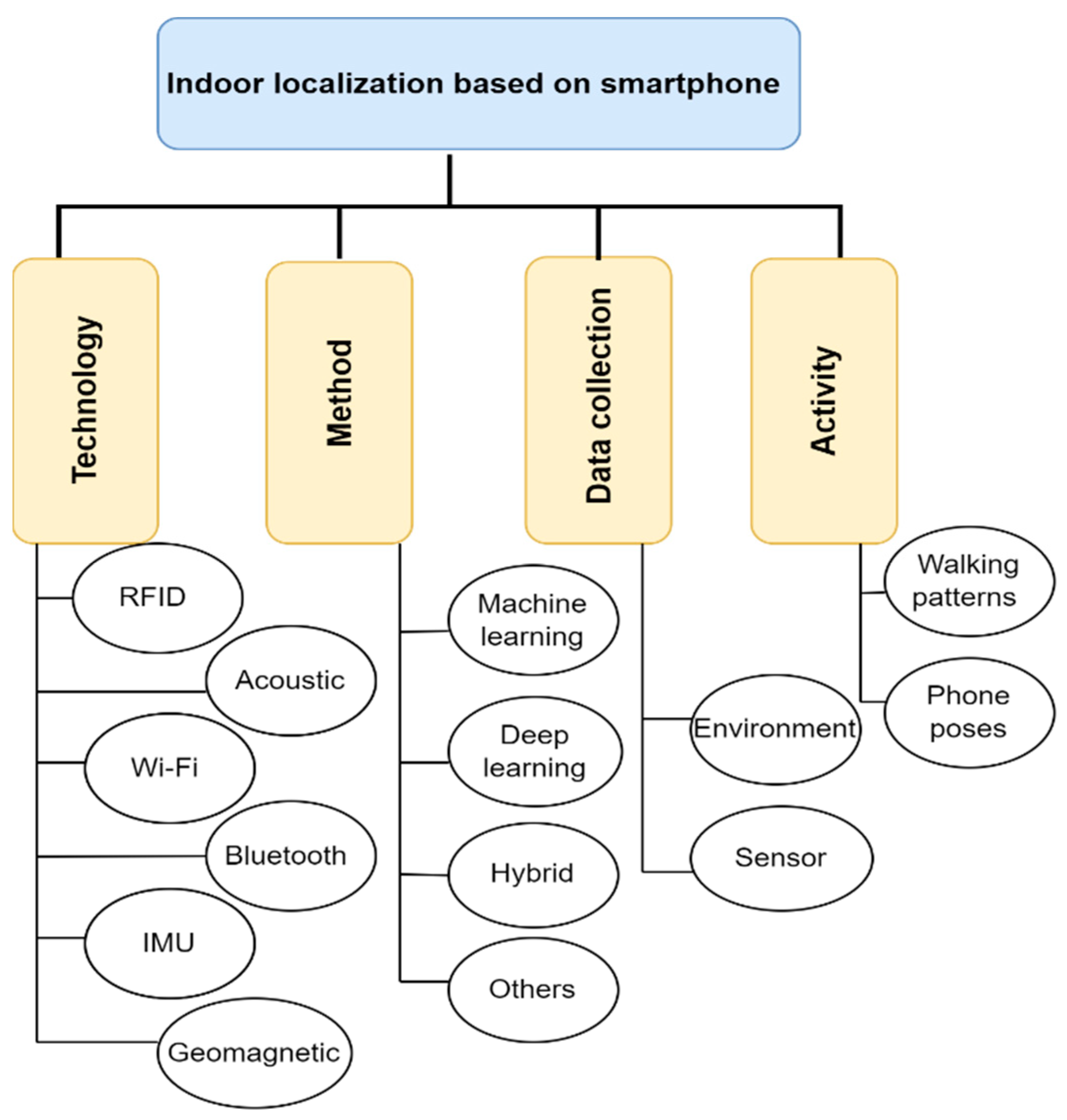
3. SLR Results
3.1. Technology
3.2. Methods
3.3. Data Collection
3.4. Pedestrian Activity
3.4.1. Walking Patterns
3.4.2. Phone Poses
3.5. Performance Evaluation
- Accuracy is measured at the macro level for multiclass classification processes using confusion matrix results. It refers to how close or how far a given collection of measurements is to its true value [true positive (TP) + true negative (TN))/(TP + TN + false positive (FP) + false negative (FN)] [100].
- Precision denotes the proportion of accurately predicted conditions to the total positive outcomes expected for each class, TP/(TP + FP) [100].
- Recall refers to the ratio of accurately predicted positive conditions to all true conditions for each class, TP/(TP + FN) [100].
- The F-score is a measure of the overall performance of a classification model by measuring the harmonic mean of its precision and recall, 2 × (precision × recall)/(precision + recall) [100].
- The confusion matrix as the classification class value distinguishes the incorrect and correct predictions from the actual results of the test sample. It is represented by four expected outcomes: TP, TN, FP, and FN [100].
- Time complexity is critical when assessing the performance efficiency of a system. The optimal classifier achieves the least time complexity while maintaining the highest accuracy [125].
- The error rate calculates the errors of a classification model for each dataset group. The best classification result is described based on the error rate measure on the training and validation sets, which refers to a low error rate for an accurate classification model [97].
4. Substantial Analysis
5. Discussion
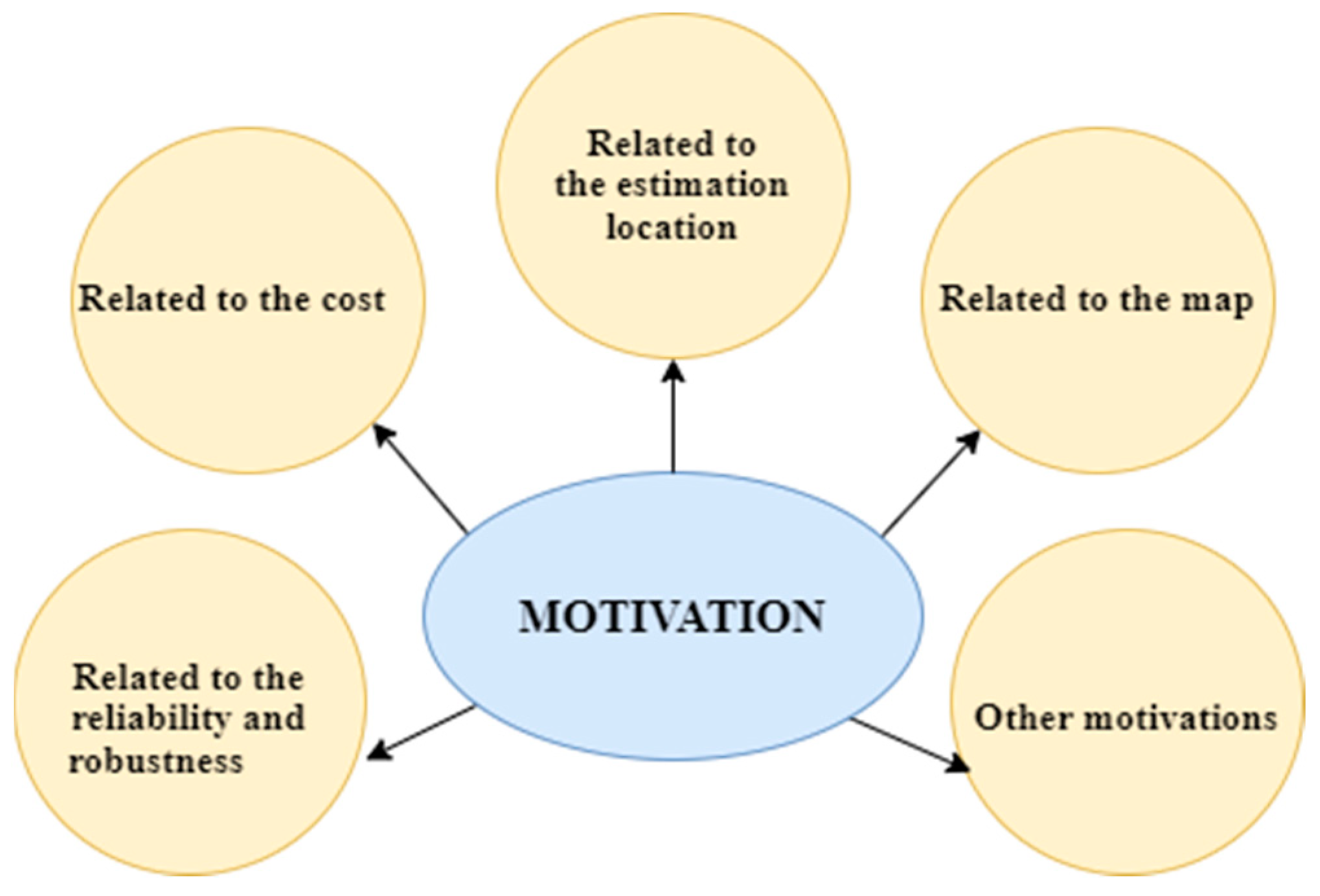
5.1. Motivation
5.1.1. Motivation Related to Reliability and Robustness
- Reliability
- b.
- Accuracy
- c.
- Walking patterns and smartphone holding
- d.
- Coverage
- e.
- Fusion methods
5.1.2. Motivation Related to Cost
- Infrastructure
- b.
- Computational Cost and Time
- c.
- Technologies
5.1.3. Motivation Related to Location Estimation
5.1.4. Motivation Related to Map
5.1.5. Other Motivation
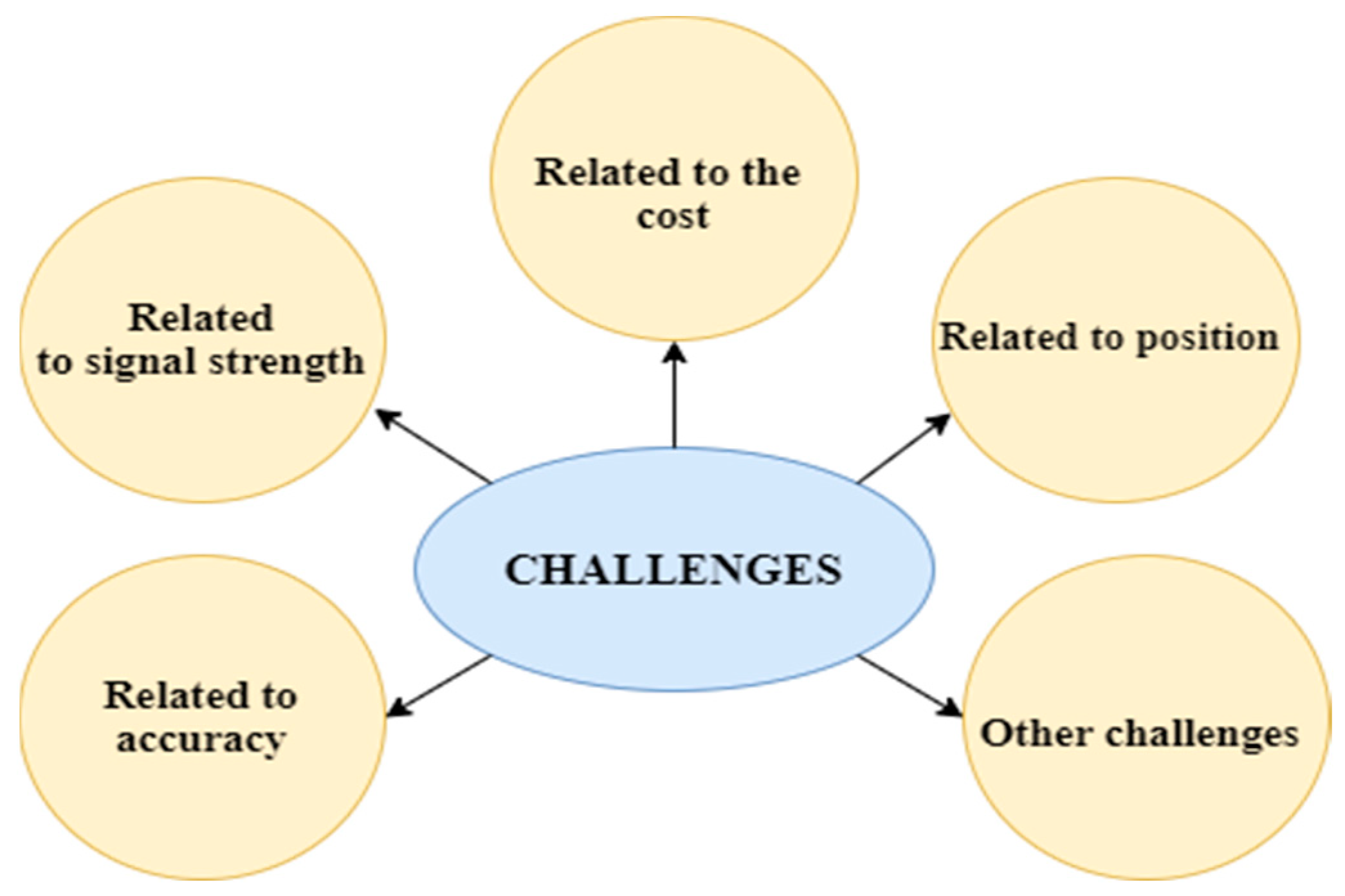
5.2. Challenges
5.2.1. Challenges Related to Accuracy
- Environment
- b.
- Smartphone and technologies
5.2.2. Challenges Related to Signal Strength
- Location and Environment
- b.
- Coverage
- c.
- Stability
- d.
- Noise
5.2.3. Challenges Related to Cost
- Infrastructure
- b.
- Time consumption
5.2.4. Challenges Related to Smartphone Position
5.2.5. Other Challenges
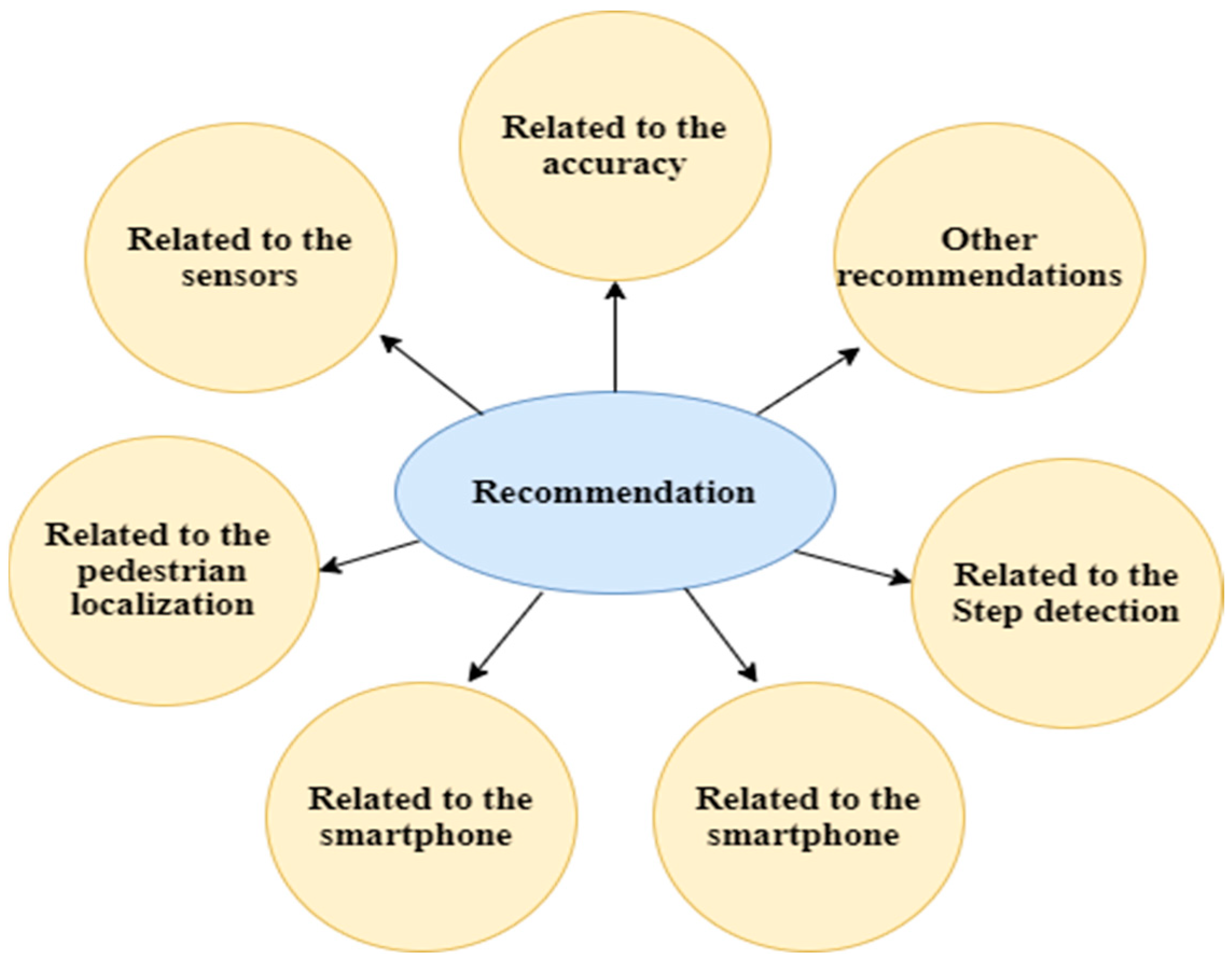
5.3. Recommendations
5.3.1. Recommendations Related to Accuracy
5.3.2. Recommendations Related to Sensors
5.3.3. Recommendations Related to Pedestrian Localization
5.3.4. Recommendations Related to Technical Aspects
5.3.5. Recommendations Related to Smartphone
5.3.6. Recommendations Related to Step Detection
5.3.7. Other Recommendations
5.4. Future Direction
- To collect data in real-time experiments on walking patterns, a researcher should choose the device based on the data that they wish to collect. Past studies deployed different devices to collect data. However, when using different smartphones, there is a problem of heterogeneity between the different platforms of the smartphones. Studies that intend to collect data related to walking patterns should use applications within a smartphone that include multiple sensors (gyroscopes, accelerometers, magnetometers, and barometers), which are necessary to detect walking patterns. A smartphone is preferred because it is equipped with multiple sensors that enable the detection of walking patterns and behavior.
- Previous researchers used two types of participants (men and women), but the authors recommended studying different types of participants, such as men, women, children, limpers, and different walking patterns such as walking, fast walking, escalators, and elevators.
- The literature mostly depicted the use of a small sample size (1–5 participants). However, it is important to gather a sample of 75 or more participants to ensure that the collected data are not “sample size dependent,” thus resulting in accurate, valid, and generalizable results.
- When a pedestrian walks in different patterns, the step length is affected. Other factors, such as height, gender, walking speed, and walking patterns, can influence step length. Therefore, there is a need to develop a better model based on the varied walking patterns and the details of participants mentioned above to generate a large dataset.
- Most of the past studies evaluated different types of walking patterns. Some deployed the ML method to distinguish the various walking patterns. However, misunderstandings could happen when attempting to recognize the nature of walking patterns. One challenge in distinguishing walking patterns is feature extraction. For a recognition system to work efficiently with large datasets, deep learning algorithms are preferred to recognize walking patterns. As such, CNN, RNN, and LSTM are proposed for the recognition system.
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Ashraf, I.; Hur, S.; Park, Y. Application of deep convolutional neural networks and smartphone sensors for indoor localization. Appl. Sci. 2019, 9, 2337. [Google Scholar] [CrossRef] [Green Version]
- Liu, T.; Zhang, X.; Li, Q.; Fang, Z. A visual-based approach for indoor radio map construction using smartphones. Sensors 2017, 17, 1790. [Google Scholar] [CrossRef] [PubMed]
- Hsu, H.-H.; Chang, J.-K.; Peng, W.-J.; Shih, T.K.; Pai, T.-W.; Man, K.L. Indoor localization and navigation using smartphone sensory data. Ann. Oper. Res. 2018, 265, 187–204. [Google Scholar] [CrossRef]
- Ashraf, I.; Hur, S.; Park, S.; Park, Y. DeepLocate: Smartphone Based Indoor Localization with a Deep Neural Network Ensemble Classifier. Sensors 2020, 20, 133. [Google Scholar] [CrossRef] [Green Version]
- Wang, Y.; Zhao, H. Improved smartphone-based indoor pedestrian dead reckoning assisted by visible light positioning. IEEE Sens. J. 2018, 19, 2902–2908. [Google Scholar] [CrossRef]
- Jo, H.J.; Kim, S. Indoor smartphone localization based on LOS and NLOS identification. Sensors 2018, 18, 3987. [Google Scholar] [CrossRef] [Green Version]
- Tan, S.Y.; Lee, K.J.; Lam, M.C. A Shopping Mall Indoor Navigation Application using Wi-Fi Positioning System. Int. J. 2020, 9, 4483–4489. [Google Scholar]
- Zhao, H.; Cheng, W.; Yang, N.; Qiu, S.; Wang, Z.; Wang, J. Smartphone-based 3D indoor pedestrian positioning through multi-modal data fusion. Sensors 2019, 19, 4554. [Google Scholar] [CrossRef] [Green Version]
- Xia, H.; Zuo, J.; Liu, S.; Qiao, Y. Indoor localization on smartphones using built-in sensors and map constraints. IEEE Trans. Instrum. Meas. 2018, 68, 1189–1198. [Google Scholar] [CrossRef]
- Ciabattoni, L.; Foresi, G.; Monteriù, A.; Pepa, L.; Pagnotta, D.P.; Spalazzi, L.; Verdini, F. Real time indoor localization integrating a model based pedestrian dead reckoning on smartphone and BLE beacons. J. Ambient. Intell. Humaniz. Comput. 2019, 10, 1–12. [Google Scholar] [CrossRef]
- Sun, Y.; Wang, B. Indoor corner recognition from crowdsourced trajectories using smartphone sensors. Expert Syst. Appl. 2017, 82, 266–277. [Google Scholar] [CrossRef]
- Zhang, Z.; He, S.; Shu, Y.; Shi, Z. A Self-Evolving WiFi-based Indoor Navigation System Using Smartphones. IEEE Trans. Mob. Comput. 2019, 19, 1760–1744. [Google Scholar] [CrossRef]
- Chen, Z.; Zou, H.; Jiang, H.; Zhu, Q.; Soh, Y.C.; Xie, L. Fusion of WiFi, smartphone sensors and landmarks using the Kalman filter for indoor localization. Sensors 2015, 15, 715–732. [Google Scholar] [CrossRef] [PubMed]
- Martínez del Horno, M.; García-Varea, I.; Orozco Barbosa, L. Calibration of Wi-Fi-based indoor tracking systems for Android-based smartphones. Remote Sens. 2019, 11, 1072. [Google Scholar] [CrossRef] [Green Version]
- Yao, Y.; Pan, L.; Feng, W.; Xu, X.; Liang, X.; Xu, X. A Robust Step Detection and Stride Length Estimation for Pedestrian Dead Reckoning Using a Smartphone. IEEE Sens. J. 2020, 20, 9685–9697. [Google Scholar] [CrossRef]
- Li, Y.; Yan, K.J.I.S.J. Indoor Localization Based on Radio and Sensor Measurements. IEEE Sens. J. 2021, 21, 25090–25097. [Google Scholar] [CrossRef]
- Vy, T.D.; Nguyen, T.L.; Shin, Y. Inertial Sensor-Based Indoor Pedestrian Localization for IPhones. In Proceedings of the 2019 International Conference on Information and Communication Technology Convergence (ICTC), Jeju, Republic of Korea, 16–18 October 2019; pp. 200–203. [Google Scholar]
- Liang, P.-C.; Krause, P. Smartphone-based real-time indoor location tracking with 1-m precision. IEEE J. Biomed. Health Inform. 2015, 20, 756–762. [Google Scholar] [CrossRef]
- Liu, J.; Qiu, Y.; Yin, K.; Dong, W.; Luo, J. RILS: RFID indoor localization system using mobile readers. Int. J. Distrib. Sens. Netw. 2018, 14, 1550147718771288. [Google Scholar] [CrossRef] [Green Version]
- Seco, F.; Jiménez, A.R. Smartphone-based cooperative indoor localization with RFID technology. Sensors 2018, 18, 266. [Google Scholar] [CrossRef] [Green Version]
- Song, X.; Wang, M.; Qiu, H.; Li, K.; Ang, C. Auditory Scene Analysis-Based Feature Extraction for Indoor Subarea Localization Using Smartphones. IEEE Sens. J. 2019, 19, 6309–6316. [Google Scholar] [CrossRef]
- Wang, Z.; Chen, R.; Xu, S.; Liu, Z.; Guo, G.; Chen, L. A Novel Method Locating Pedestrian With Smartphone Indoors Using Acoustic Fingerprints. IEEE Sens. J. 2021, 21, 27887–27896. [Google Scholar] [CrossRef]
- Kang, W.; Han, Y. SmartPDR: Smartphone-based pedestrian dead reckoning for indoor localization. IEEE Sens. J. 2014, 15, 2906–2916. [Google Scholar] [CrossRef]
- Bordoy, J.; Schindelhauer, C.; Höflinger, F.; Reindl, L.M. Exploiting Acoustic Echoes for Smartphone Localization and Microphone Self-Calibration. IEEE Trans. Instrum. Meas. 2019, 69, 1484–1492. [Google Scholar] [CrossRef]
- Guo, G.; Chen, R.; Ye, F.; Peng, X.; Liu, Z.; Pan, Y. Indoor Smartphone Localization: A Hybrid WiFi RTT-RSS Ranging Approach. IEEE Access 2019, 7, 176767–176781. [Google Scholar] [CrossRef]
- Zhang, L.; Huang, L.; Yi, Q.; Wang, X.; Zhang, D.; Zhang, G. Positioning Method of Pedestrian Dead Reckoning Based on Human Activity Recognition Assistance. In Proceedings of the 2022 IEEE 12th International Conference on Indoor Positioning and Indoor Navigation (IPIN), Beijing, China, 5–8 September 2022; pp. 1–8. [Google Scholar]
- Poulose, A.; Eyobu, O.S.; Han, D.S. An indoor position-estimation algorithm using smartphone IMU sensor data. IEEE Access 2019, 7, 11165–11177. [Google Scholar] [CrossRef]
- Zhao, H.; Zhang, L.; Qiu, S.; Wang, Z.; Yang, N.; Xu, J. Pedestrian Dead Reckoning Using Pocket-Worn Smartphone. IEEE Access 2019, 7, 91063–91073. [Google Scholar] [CrossRef]
- Yang, Z.; Pan, Y.; Zhang, L. Hybrid orientation filter aided indoor tracking for pedestrians using a smartphone. In Proceedings of the 2017 13th IEEE International Conference on Control & Automation (ICCA), Ohrid, Macedonia, 3–6 July 2017; pp. 107–112. [Google Scholar]
- Estévez Casado, F.; Rodríguez García, G.; Iglesias Rodríguez, R.; Vázquez Regueiro, C.; Barro Ameneiro, S.; Canedo Rodríguez, A. Walking Recognition in Mobile Devices. Sensors 2020, 20, 1189. [Google Scholar] [CrossRef] [Green Version]
- Mekruksavanich, S.; Jantawong, P.; Jitpattanakul, A. Deep Learning-based Action Recognition for Pedestrian Indoor Localization using Smartphone Inertial Sensors. In Proceedings of the 2022 Joint International Conference on Digital Arts, Media and Technology with ECTI Northern Section Conference on Electrical, Electronics, Computer and Telecommunications Engineering (ECTI DAMT & NCON), Chiang Rai, Thailand, 26–28 January 2022; pp. 346–349. [Google Scholar]
- Zhou, B.; Yang, J.; Li, Q.J.S. Smartphone-based activity recognition for indoor localization using a convolutional neural network. Sensors 2019, 19, 621. [Google Scholar] [CrossRef] [Green Version]
- Rahman, S.Z.A.; Abdullah, S.N.H.S.; Nazri, M.Z.B.A. The analysis for gait energy image based on statistical methods. In Proceedings of the 2016 International Conference on Advances in Electrical, Electronic and Systems Engineering (ICAEES), Putrajaya, Malaysia, 14–16 November 2016; pp. 125–128. [Google Scholar]
- Kurniawan, R.; Nazri, M.Z.A.; Irsyad, M.; Yendra, R.; Aklima, A. On machine learning technique selection for classification. In Proceedings of the 2015 International Conference on Electrical Engineering and Informatics (ICEEI), Denpasar, Indonesia, 10–11 August 2015; pp. 540–545. [Google Scholar]
- Siswantoro, J.; Prabuwono, A.S.; Abdullah, A.; Idrus, B. A linear model based on Kalman filter for improving neural network classification performance. Expert Syst. Appl. 2016, 49, 112–122. [Google Scholar] [CrossRef]
- Moreira, D.; Barandas, M.; Rocha, T.; Alves, P.; Santos, R.; Leonardo, R.; Vieira, P.; Gamboa, H.J.S. Human activity recognition for indoor localization using smartphone inertial sensors. Sensors 2021, 21, 6316. [Google Scholar] [CrossRef]
- Chandra, G. Position Estimation at Indoors using Wi-Fi and Magnetic Field Sensors. In Proceedings of the IPIN 2022 WiP Proceedings, Beijing, China, 5–7 September 2022. [Google Scholar]
- LeCun, Y.; Bengio, Y.; Hinton, G. Deep learning. Nature 2015, 521, 436–444. [Google Scholar] [CrossRef] [PubMed]
- Al-Khaleefa, A.S.; Hassan, R.; Ahmad, M.R.; Qamar, F.; Wen, Z.; Aman, A.H.M.; Yu, K. Systems. Performance evaluation of online machine learning models based on cyclic dynamic and feature-adaptive time series. IEICE Trans. Inf. Syst. 2021, 104, 1172–1184. [Google Scholar] [CrossRef]
- Ashraf, I.; Hur, S.; Park, Y. Smartphone Sensor Based Indoor Positioning: Current Status, Opportunities, and Future Challenges. Electronics 2020, 9, 891. [Google Scholar] [CrossRef]
- Zafari, F.; Gkelias, A.; Leung, K.K. A survey of indoor localization systems and technologies. IEEE Commun. Surv. Tutor. 2019, 21, 2568–2599. [Google Scholar] [CrossRef] [Green Version]
- Xiao, J.; Zhou, Z.; Yi, Y.; Ni, L.M. A survey on wireless indoor localization from the device perspective. ACM Comput. Surv. 2016, 49, 1–31. [Google Scholar] [CrossRef] [Green Version]
- Obeidat, H.; Shuaieb, W.; Obeidat, O.; Abd-Alhameed, R. A review of indoor localization techniques and wireless technologies. Wirel. Pers. Commun. 2021, 119, 289–327. [Google Scholar] [CrossRef]
- Lashkari, B.; Rezazadeh, J.; Farahbakhsh, R.; Sandrasegaran, K. Crowdsourcing and sensing for indoor localization in IoT: A review. IEEE Sens. J. 2018, 19, 2408–2434. [Google Scholar] [CrossRef]
- Yassin, A.; Nasser, Y.; Awad, M.; Al-Dubai, A.; Liu, R.; Yuen, C.; Raulefs, R.; Aboutanios, E. Recent advances in indoor localization: A survey on theoretical approaches and applications. IEEE Commun. Surv. Tutor. 2016, 19, 1327–1346. [Google Scholar] [CrossRef] [Green Version]
- Simões, W.C.; Machado, G.S.; Sales, A.M.; de Lucena, M.M.; Jazdi, N.; de Lucena, V.F., Jr. A review of technologies and techniques for indoor navigation systems for the visually impaired. Sensors 2020, 20, 3935. [Google Scholar] [CrossRef]
- Hossain, A.M.; Soh, W.-S. A survey of calibration-free indoor positioning systems. Comput. Commun. 2015, 66, 1–13. [Google Scholar] [CrossRef]
- Laoudias, C.; Moreira, A.; Kim, S.; Lee, S.; Wirola, L.; Fischione, C. A survey of enabling technologies for network localization, tracking, and navigation. IEEE Commun. Surv. Tutor. 2018, 20, 3607–3644. [Google Scholar] [CrossRef] [Green Version]
- Rahman, A.M.; Li, T.; Wang, Y. Recent advances in indoor localization via visible lights: A survey. Sensors 2020, 20, 1382. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Morar, A.; Moldoveanu, A.; Mocanu, I.; Moldoveanu, F.; Radoi, I.E.; Asavei, V.; Gradinaru, A.; Butean, A. A comprehensive survey of indoor localization methods based on computer vision. Sensors 2020, 20, 2641. [Google Scholar] [CrossRef]
- Kunhoth, J.; Karkar, A.; Al-Maadeed, S.; Al-Ali, A. Indoor positioning and wayfinding systems: A survey. Hum.-Cent. Comput. Inf. Sci. 2020, 10, 1–41. [Google Scholar] [CrossRef]
- Holcer, S.; Torres-Sospedra, J.; Gould, M.; Remolar, I. Privacy in indoor positioning systems: A systematic review. In Proceedings of the 2020 International Conference on Localization and GNSS (ICL-GNSS), Tampere, Finland, 2–4 June 2020; pp. 1–6. [Google Scholar]
- Pascacio, P.; Casteleyn, S.; Torres-Sospedra, J.; Lohan, E.S.; Nurmi, J. Collaborative indoor positioning systems: A systematic review. Sensors 2021, 21, 1002. [Google Scholar] [CrossRef] [PubMed]
- Lam, L.D.; Tang, A.; Grundy, J. Heuristics-based indoor positioning systems: A systematic literature review. J. Locat. Based Serv. 2016, 10, 178–211. [Google Scholar] [CrossRef]
- Khan, D.; Cheng, Z.; Uchiyama, H.; Ali, S.; Asshad, M.; Kiyokawa, K. Recent advances in vision-based indoor navigation: A systematic literature review. Comput. Graph. 2022, 104, 24–45. [Google Scholar] [CrossRef]
- Alobaidi, O.R.; Chelvanathan, P.; Tiong, S.K.; Bais, B.; Uzzaman, M.A.; Amin, N. Transparent Antenna for Green Communication Feature: A Systematic Review on Taxonomy Analysis, Open Challenges, Motivations, Future Directions and Recommendations. IEEE Access 2020, 10, 12286–12321. [Google Scholar] [CrossRef]
- Keele, S. Guidelines for Performing Systematic Literature Reviews in Software Engineering; Technical Report, ver. 2.3 Ebse Technical Report; EBSE: Durham, UK, 2007. [Google Scholar]
- Wohlin, C. Guidelines for snowballing in systematic literature studies and a replication in software engineering. In Proceedings of the 18th International Conference on Evaluation and Assessment in Software Engineering, London, UK, 13–14 May 2014; pp. 1–10. [Google Scholar]
- Wu, C.; Yang, Z.; Zhou, Z.; Liu, Y.; Liu, M. Mitigating Large Errors in WiFi-Based Indoor Localization for Smartphones. IEEE Trans. Veh. Technol. 2017, 66, 6246–6257. [Google Scholar] [CrossRef]
- Anand, S.; Bijlani, K.; Suresh, S.; Praphul, P. Attendance monitoring in classroom using smartphone & Wi-Fi fingerprinting. In Proceedings of the 2016 IEEE Eighth International Conference on Technology for Education (T4E), Mumbai, India, 2–4 December 2016; pp. 62–67. [Google Scholar]
- Han, K.; Yu, S.M.; Kim, S.-L. Smartphone-based Indoor Localization Using Wi-Fi Fine Timing Measurement. In Proceedings of the 2019 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Pisa, Italy, 30 September–3 October 2019; pp. 1–5. [Google Scholar] [CrossRef]
- Abadleh, A.; Maitah, W.; Salman, H.E.; Lasassmeh, O.; Hammouri, A. Smartphones-Based Crowdsourcing Approach for Installing Indoor Wi-Fi Access Points. Int. J. Adv. Comput. Sci. Appl. 2019, 10, 542–549. [Google Scholar] [CrossRef] [Green Version]
- Luo, J.; Fu, L. A smartphone indoor localization algorithm based on WLAN location fingerprinting with feature extraction and clustering. Sensors 2017, 17, 1339. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Zhao, Z.; Braun, T.; Li, Z.; Neto, A. A real-time robust indoor tracking system in smartphones. Comput. Commun. 2018, 117, 104–115. [Google Scholar] [CrossRef]
- Li, X.; Wang, J.; Liu, C.; Zhang, L.; Li, Z. Integrated WiFi/PDR/smartphone using an adaptive system noise extended Kalman filter algorithm for indoor localization. ISPRS Int. J. Geo-Inf. 2016, 5, 8. [Google Scholar] [CrossRef] [Green Version]
- Waqar, W.; Chen, Y.; Vardy, A. Smartphone positioning in sparse Wi-Fi environments. Comput. Commun. 2016, 73, 108–117. [Google Scholar] [CrossRef]
- Fetzer, T.; Ebner, F.; Bullmann, M.; Deinzer, F.; Grzegorzek, M. Smartphone-Based Indoor Localization within a 13th Century Historic Building. Sensors 2018, 18, 4095. [Google Scholar] [CrossRef] [Green Version]
- Xu, S.; Chen, R.; Yu, Y.; Guo, G.; Huang, L. Locating Smartphones Indoors Using Built-In Sensors and Wi-Fi Ranging With an Enhanced Particle Filter. IEEE Access 2019, 7, 95140–95153. [Google Scholar] [CrossRef]
- Vy, T.D.; Nguyen, T.L.; Shin, Y. A smartphone indoor localization using inertial sensors and single Wi-Fi access point. In Proceedings of the 2019 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Pisa, Italy, 30 September–3 October 2019; pp. 1–7. [Google Scholar] [CrossRef]
- Yu, J.; Na, Z.; Liu, X.; Deng, Z. WiFi/PDR-integrated indoor localization using unconstrained smartphones. EURASIP J. Wirel. Commun. Netw. 2019, 2019, 1–13. [Google Scholar] [CrossRef]
- Poulose, A.; Kim, J.; Han, D.S. A sensor fusion framework for indoor localization using smartphone sensors and Wi-Fi RSSI measurements. Appl. Sci. 2019, 9, 4379. [Google Scholar] [CrossRef] [Green Version]
- Sun, M.; Wang, Y.; Xu, S.; Qi, H.; Hu, X. Indoor Positioning Tightly Coupled Wi-Fi FTM Ranging and PDR Based on the Extended Kalman Filter for Smartphones. IEEE Access 2020, 8, 49671–49684. [Google Scholar] [CrossRef]
- Yuanfeng, D.; Dongkai, Y.; Huilin, Y.; Chundi, X. Flexible indoor localization and tracking system based on mobile phone. J. Netw. Comput. Appl. 2016, 69, 107–116. [Google Scholar] [CrossRef]
- Villien, C.; Frassati, A.; Flament, B. Evaluation of An Indoor Localization Engine. In Proceedings of the 2019 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Pisa, Italy, 30 September–3 October 2019; pp. 1–8. [Google Scholar] [CrossRef]
- Chen, J.; Zhang, Y.; Xue, W. Unsupervised indoor localization based on Smartphone Sensors, iBeacon and Wi-Fi. Sensors 2018, 18, 1378. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Yuan, H.; Wang, J.; Zhao, Z.; Cui, J.; Yan, M.; Wei, S. MagWi: Practical indoor localization with smartphone magnetic and WiFi sensors. In Proceedings of the 2019 IEEE 25th International Conference on Parallel and Distributed Systems (ICPADS), Tianjin, China, 4–6 December 2019; pp. 814–821. [Google Scholar]
- Zhang, W.; Sengupta, R.; Fodero, J.; Li, X. DeepPositioning: Intelligent fusion of pervasive magnetic field and WiFi fingerprinting for smartphone indoor localization via deep learning. In Proceedings of the 2017 16th IEEE International Conference on Machine Learning and Applications (ICMLA), Cancun, Mexico, 18–21 December 2017; pp. 7–13. [Google Scholar]
- Tiku, S.; Pasricha, S.; Notaros, B.; Han, Q. A Hidden Markov Model based Smartphone Heterogeneity Resilient Portable Indoor Localization Framework. J. Syst. Archit. 2020, 108, 101806. [Google Scholar] [CrossRef]
- Zhuang, Y.; Syed, Z.; Georgy, J.; El-Sheimy, N. Autonomous smartphone-based WiFi positioning system by using access points localization and crowdsourcing. Pervasive Mob. Comput. 2015, 18, 118–136. [Google Scholar] [CrossRef]
- Gu, F.; Niu, J.; Duan, L. WAIPO: A Fusion-Based Collaborative Indoor Localization System on Smartphones. IEEE/ACM Trans. Netw. 2017, 25, 2267–2280. [Google Scholar] [CrossRef]
- Roy, P.; Chowdhury, C.; Ghosh, D.; Bandyopadhyay, S. JUIndoorLoc: A Ubiquitous Framework for Smartphone-Based Indoor Localization Subject to Context and Device Heterogeneity. Wirel. Pers. Commun. 2019, 106, 739–762. [Google Scholar] [CrossRef]
- Real Ehrlich, C.; Blankenbach, J. Indoor localization for pedestrians with real-time capability using multi-sensor smartphones. Geo-Spat. Inf. Sci. 2019, 22, 73–88. [Google Scholar] [CrossRef] [Green Version]
- Deng, Z.-A.; Hu, Y.; Yu, J.; Na, Z. Extended Kalman Filter for Real Time Indoor Localization by Fusing WiFi and Smartphone Inertial Sensors. Micromachines 2015, 6, 523–543. [Google Scholar] [CrossRef] [Green Version]
- Chen, G.; Meng, X.; Wang, Y.; Zhang, Y.; Tian, P.; Yang, H. Integrated WiFi/PDR/Smartphone using an unscented kalman filter algorithm for 3D indoor localization. Sensors 2015, 15, 24595–24614. [Google Scholar] [CrossRef] [Green Version]
- Li, S.; Qin, Z.; Song, H.; Si, C.; Sun, B.; Yang, X.; Zhang, R. A lightweight and aggregated system for indoor/outdoor detection using smart devices. Future Gener. Comput. Syst. 2020, 107, 988–997. [Google Scholar] [CrossRef]
- Ta, V.-C.; Dao, T.-K.; Vaufreydaz, D.; Castelli, E. Collaborative Smartphone-Based User Positioning in a Multiple-User Context Using Wireless Technologies. Sensors 2020, 20, 405. [Google Scholar] [CrossRef] [Green Version]
- Liang, Q.; Liu, M. An Automatic Site Survey Approach for Indoor Localization Using a Smartphone. IEEE Trans. Autom. Sci. Eng. 2019, 17, 191–206. [Google Scholar] [CrossRef]
- Jiao, J.; Li, F.; Deng, Z.; Ma, W. A smartphone camera-based indoor positioning algorithm of crowded scenarios with the assistance of deep CNN. Sensors 2017, 17, 704. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Qiu, C.; Mutka, M.W. CRISP: Cooperation among smartphones to improve indoor position information. Wirel. Netw. 2016, 24, 867–884. [Google Scholar] [CrossRef]
- Zhao, D.; Xu, H.; An, J.; Liu, L.; Ma, H. ISR: Indoor shop recognition via user-friendly and efficient fingerprinting on smartphones. Mach. Vis. Appl. 2017, 28, 781–791. [Google Scholar] [CrossRef]
- Zhang, M.; Jia, J.; Chen, J.; Deng, Y.; Wang, X.; Aghvami, A.H. Indoor localization fusing wifi with smartphone inertial sensors using lstm networks. IEEE Internet Things J. 2021, 8, 13608–13623. [Google Scholar] [CrossRef]
- Yang, S.; Liu, J.; Gong, X.; Huang, G.; Bai, Y.J.I.I.o.T.J. A robust heading estimation solution for smartphone multisensor-integrated indoor positioning. IEEE Internet Things J. 2021, 8, 17186–17198. [Google Scholar] [CrossRef]
- Tian, Q.; Salcic, Z.; Wang, K.I.-K.; Pan, Y. A hybrid indoor localization and navigation system with map matching for pedestrians using smartphones. Sensors 2015, 15, 30759–30783. [Google Scholar] [CrossRef] [Green Version]
- Shang, J.; Hu, X.; Cheng, W.; Fan, H. GridiLoc: A backtracking grid filter for fusing the grid model with PDR using smartphone sensors. Sensors 2016, 16, 2137. [Google Scholar] [CrossRef] [Green Version]
- Li, X.; Wei, D.; Lai, Q.; Xu, Y.; Yuan, H. Smartphone-based integrated PDR/GPS/Bluetooth pedestrian location. Adv. Space Res. 2017, 59, 877–887. [Google Scholar] [CrossRef]
- Dinh, T.-M.T.; Duong, N.-S.; Sandrasegaran, K. Smartphone-based Indoor Positioning Using BLE iBeacon and Reliable Lightweight Fingerprint Map. IEEE Sens. J. 2020, 20, 10283–10294. [Google Scholar] [CrossRef]
- Yang, Z.; Pan, Y.; Tian, Q.; Huan, R. Real-Time Infrastructureless Indoor Tracking for Pedestrian Using a Smartphone. IEEE Sens. J. 2019, 19, 10782–10795. [Google Scholar] [CrossRef]
- Zhou, B.; Li, Q.; Mao, Q.; Tu, W.; Zhang, X. Activity sequence-based indoor pedestrian localization using smartphones. IEEE Trans. Hum.-Mach. Syst. 2014, 45, 562–574. [Google Scholar] [CrossRef]
- Wang, B.; Liu, X.; Yu, B.; Jia, R.; Gan, X. Pedestrian dead reckoning based on motion mode recognition using a smartphone. Sensors 2018, 18, 1811. [Google Scholar] [CrossRef] [Green Version]
- Kang, J.; Lee, J.; Eom, D.-S. Smartphone-based traveled distance estimation using individual walking patterns for indoor localization. Sensors 2018, 18, 3149. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Qian, J.; Pei, L.; Ma, J.; Ying, R.; Liu, P. Vector graph assisted pedestrian dead reckoning using an unconstrained smartphone. Sensors 2015, 15, 5032–5057. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Liu, C.; Jiang, S.; Zhao, S.; Guo, Z. Infrastructure-free indoor pedestrian tracking with smartphone acoustic-based enhancement. Sensors 2019, 19, 2458. [Google Scholar] [CrossRef] [Green Version]
- Paek, J.; Ko, J.; Shin, H. A measurement study of BLE iBeacon and geometric adjustment scheme for indoor location-based mobile applications. Mob. Inf. Syst. 2016, 2016, 8367638. [Google Scholar] [CrossRef] [Green Version]
- Zhuang, Y.; Yang, J.; Li, Y.; Qi, L.; El-Sheimy, N. Smartphone-based indoor localization with bluetooth low energy beacons. Sensors 2016, 16, 596. [Google Scholar] [CrossRef] [Green Version]
- Chen, Z.; Zhu, Q.; Soh, Y.C. Smartphone Inertial Sensor-Based Indoor Localization and Tracking with iBeacon Corrections. IEEE Trans. Ind. Inform. 2016, 12, 1540–1549. [Google Scholar] [CrossRef]
- Yao, Y.; Bao, Q.; Han, Q.; Yao, R.; Xu, X.; Yan, J. BtPDR: Bluetooth and PDR-Based Indoor Fusion Localization Using Smartphones. TIIS 2018, 12, 3657–3682. [Google Scholar]
- Orujov, F.; Maskeliūnas, R.; Damaševičius, R.; Wei, W.; Li, Y. Smartphone based intelligent indoor positioning using fuzzy logic. Future Gener. Comput. Syst. 2018, 89, 335–348. [Google Scholar] [CrossRef]
- Murata, M.; Ahmetovic, D.; Sato, D.; Takagi, H.; Kitani, K.M.; Asakawa, C. Smartphone-based localization for blind navigation in building-scale indoor environments. Pervasive Mob. Comput. 2019, 57, 14–32. [Google Scholar] [CrossRef] [Green Version]
- Yu, Y.; Chen, R.; Chen, L.; Zheng, X.; Wu, D.; Li, W.; Wu, Y. A novel 3-D indoor localization algorithm based on BLE and multiple sensors. IEEE Internet Things J. 2021, 8, 9359–9372. [Google Scholar] [CrossRef]
- Ashraf, I.; Hur, S.; Shafiq, M.; Kumari, S.; Park, Y. GUIDE: Smartphone sensors-based pedestrian indoor localization with heterogeneous devices. Int. J. Commun. Syst. 2019, 32, e4062. [Google Scholar] [CrossRef]
- Wang, X.; Yu, Z.; Mao, S. Indoor localization using smartphone magnetic and light sensors: A deep LSTM approach. Mob. Netw. Appl. 2020, 25, 819–832. [Google Scholar] [CrossRef]
- Wang, G.; Wang, X.; Nie, J.; Lin, L. Magnetic-Based Indoor Localization Using Smartphone via a Fusion Algorithm. IEEE Sens. J. 2019, 19, 6477–6485. [Google Scholar] [CrossRef]
- Xie, H.; Gu, T.; Tao, X.; Ye, H.; Lu, J. A reliability-augmented particle filter for magnetic fingerprinting based indoor localization on smartphone. IEEE Trans. Mob. Comput. 2015, 15, 1877–1892. [Google Scholar] [CrossRef]
- Sheinker, A.; Ginzburg, B.; Salomonski, N.; Frumkis, L.; Kaplan, B.-Z.; Moldwin, M.B. A method for indoor navigation based on magnetic beacons using smartphones and tablets. Measurement 2016, 81, 197–209. [Google Scholar] [CrossRef]
- Ashraf, I.; Hur, S.; Park, Y. Enhancing Performance of Magnetic Field Based Indoor Localization Using Magnetic Patterns from Multiple Smartphones. Sensors 2020, 20, 2704. [Google Scholar] [CrossRef]
- Li, P.; Yang, X.; Yin, Y.; Gao, S.; Niu, Q. Smartphone-Based Indoor Localization with Integrated Fingerprint Signal. IEEE Access 2020, 8, 33178–33187. [Google Scholar] [CrossRef]
- Ding, X.; Zhu, M.; Xiao, B. Accurate Indoor Localization Using Magnetic Sequence Fingerprints with Deep Learning. In Proceedings of the International Conference on Algorithms and Architectures for Parallel Processing, Online, 3–5 December 2021; pp. 65–84. [Google Scholar]
- Huang, W.; Xiong, Y.; Li, X.-Y.; Lin, H.; Mao, X.; Yang, P.; Liu, Y.; Wang, X. Swadloon: Direction finding and indoor localization using acoustic signal by shaking smartphones. IEEE Trans. Mob. Comput. 2014, 14, 2145–2157. [Google Scholar] [CrossRef]
- Liu, K.; Liu, X.; Li, X. Guoguo: Enabling fine-grained smartphone localization via acoustic anchors. IEEE Trans. Mob. Comput. 2015, 15, 1144–1156. [Google Scholar] [CrossRef]
- Wang, X.; Qin, D.; Guo, R.; Zhao, M.; Ma, L.; Berhane, T.M. The Technology of Crowd-Sourcing Landmarks-Assisted Smartphone in Indoor Localization. IEEE Access 2020, 8, 57036–57048. [Google Scholar] [CrossRef]
- Árvai, L. Convolutional neural network-based activity monitoring for indoor localization. Pollack Period. 2021, 16, 7–12. [Google Scholar] [CrossRef]
- Huan, R.; Jiang, C.; Ge, L.; Shu, J.; Zhan, Z.; Chen, P.; Chi, K.; Liang, R. Human complex activity recognition with sensor data using multiple features. IEEE Sens. J. 2021, 22, 757–775. [Google Scholar] [CrossRef]
- Labinghisa, B.A.; Lee, D.M. Applications. Indoor localization system using deep learning based scene recognition. Multimed. Tools Appl. 2022, 81, 28405–28429. [Google Scholar] [CrossRef]
- Chen, P.; Liu, F.; Gao, S.; Li, P.; Yang, X.; Niu, Q. Smartphone-Based Indoor Fingerprinting Localization Using Channel State Information. IEEE Access 2019, 7, 180609–180619. [Google Scholar] [CrossRef]
- Hölzke, F.; Wolff, J.-P.; Haubelt, C. Improving pedestrian dead reckoning using likely paths and backtracking for mobile devices. In Proceedings of the 2019 IEEE International Conference on Pervasive Computing and Communications Workshops (PerCom Workshops), Kyoto, Japan, 11–15 March 2019; pp. 273–278. [Google Scholar]
- Xu, W.; Liu, L.; Zlatanova, S.; Penard, W.; Xiong, Q. A pedestrian tracking algorithm using grid-based indoor model. Autom. Constr. 2018, 92, 173–187. [Google Scholar] [CrossRef]
- Qiu, C.; Mutka, M.W. Walk and learn: Enabling accurate indoor positioning by profiling outdoor movement on smartphones. Pervasive Mob. Comput. 2018, 48, 84–100. [Google Scholar] [CrossRef]
- Huang, L.; Li, H.; Yu, B.; Gan, X.; Wang, B.; Li, Y.; Zhu, R. Combination of Smartphone MEMS Sensors and Environmental Prior Information for Pedestrian Indoor Positioning. Sensors 2020, 20, 2263. [Google Scholar] [CrossRef] [Green Version]
- Geng, J.; Xia, L.; Xia, J.; Li, Q.; Zhu, H.; Cai, Y. Smartphone-based pedestrian dead reckoning for 3D indoor positioning. Sensors 2021, 21, 8180. [Google Scholar] [CrossRef] [PubMed]
- Teng, X.; Xu, P.; Guo, D.; Guo, Y.; Hu, R.; Chai, H.; Chuxing, D. ARPDR: An accurate and robust pedestrian dead reckoning system for indoor localization on handheld smartphones. In Proceedings of the 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Las Vegas, NV, USA, 24 October 2020–24 January 2021; pp. 10888–10893. [Google Scholar]
- Galioto, G.; Tinnirello, I.; Croce, D.; Inderst, F.; Pascucci, F.; Giarré, L. Sensor fusion localization and navigation for visually impaired people. In Proceedings of the 23rd Annual International Conference on Mobile Computing and Networking, Limassol, Cyprus, 12–15 June 2018; pp. 471–473. [Google Scholar]
- Zhao, Y.; Xu, J.; Wu, J.; Hao, J.; Qian, H.J.I.I.o.T.J. Enhancing camera-based multimodal indoor localization with device-free movement measurement using WiFi. IEEE Internet Things J. 2019, 7, 1024–1038. [Google Scholar] [CrossRef]
- Wang, B.; Chen, Q.; Yang, L.T.; Chao, H.-C. Indoor smartphone localization via fingerprint crowdsourcing: Challenges and approaches. IEEE Wirel. Commun. 2016, 23, 82–89. [Google Scholar] [CrossRef]
- Awad, F.; Al-Sadi, A.; Alsmady, A. Distributed and adaptive location identification system for mobile devices. EURASIP J. Adv. Signal Process. 2018, 2018, 61. [Google Scholar] [CrossRef]
- Li, M.; Chen, R.; Liao, X.; Guo, B.; Zhang, W.; Guo, G. A Precise Indoor Visual Positioning Approach Using a Built Image Feature Database and Single User Image from Smartphone Cameras. Remote Sens. 2020, 12, 869. [Google Scholar] [CrossRef] [Green Version]
- Tomažič, S.; Dovžan, D.; Škrjanc, I. Confidence-interval-fuzzy-model-based indoor localization. IEEE Trans. Ind. Electron. 2018, 66, 2015–2024. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Type of Technology | Articles |
|---|---|
| Wi-Fi | [2,6,12,13,14,17,25,59,60,61,62,63,64,65,66,67,68,69,70,71,72,73,74,75,76,77,78,79,80,81,82,83,84,85,86,87,88,89,90,91,92] |
| RFID | [19,20,93] |
| IMU | [5,9,15,17,20,27,28,29,66,67,68,69,70,71,72,73,83,93,94,95,96,97,98,99,100,101,102] |
| BLU | [9,10,18,74,75,82,86,89,92,95,96,103,104,105,106,107,108,109] |
| Geomagnetic | [1,4,76,77,80,82,87,110,111,112,113,114,115,116,117] |
| Acoustic | [21,22,24,102,102,118,119] |
| Technology | Approach | Advantages | Disadvantages |
|---|---|---|---|
| RFID | RSS, Proximity | RFID tags can be attached to items and deployed in harsh locations without requiring line-of-sight communication [19]. | RFID is used with localization based on smartphones with external devices, even with limited positioning coverage [20]. RFID is used in a small area and it relies on short-range connection [4]. |
| Acoustic | TDOA, ToA | Acoustic waves have slower propagation speed and are relatively stable, thus the ability to transfer information in an indoor environment effectively [21]. | Acoustic waves are frequently reflected or obstructed by walls or other things, thus affecting the performance of the localization system and causing time delay [24]. They have low updating rates and short operating distance [77]. |
| Wi-Fi | RSS | Wi-Fi is widely utilized with indoor localization due to its lower hardware cost and wide-scale coverage [70]. | The accuracy of Wi-Fi localization is affected by RSS variations and complicated indoor radio environments [68,70]. Much time and work is needed to construct and maintain an RSS location-direction database, but it cannot handle user mobility [69]. |
| Bluetooth | RSS, Proximity | Small, cheap, light, and low power consumption; Bluetooth is used in smart gadgets [104]. Most smart devices can receive BLE RSS transmissions [103]. | Without additional infrastructure, BLE systems cannot function correctly or deliver the localization precision required for indoor LBS [40]. |
| IMU | Tracking, navigation | low in cost, small in size, and low in power consumption, The error rate of a PDR system is reduced when IMU incorporated in smartphones is used [28]. Sensor placement flexibility and low sensor accuracy are vital when using IMUs in smartphones [8,28]. | Drift errors can build over time, which can result in significant errors in the estimated position and orientation of the device [68]. The navigation accuracy IMU can decrease with time due to noise that causes drift [79,102]. |
| Geomagnetic | RSS | The Earth’s magnetic field is homogeneous for small areas (a few meters), pervasive, cheap, infrastructure-independent, and stable time wise [40]. | Anomaly readings can be caused by fluctuating measurement readings and the vicinity of ferromagnetic elements, such as iron and nickel [40]. |
| Ref. | Type of Approaches | Methods | Motivation |
|---|---|---|---|
| [78,98] | ML | HMM | A statistical prediction model that can estimate probabilities of observable cases. HMMs are well-known for recognizing patterns that change over time and have applications in pattern recognition, motion detection, and speech synthesis. |
| [1,12,75,76,113,123] | ML | KNN | A popular classifier with a simple yet efficient structure. This method is adopted to estimate the location of the sample with the closest feature distances. A modified (KNN)Is exhibited to determine the pedestrian’s current location. |
| [99,124] | ML | SVM | A model for classification that can process nonlinear relations and is utilized to identify patterns of behavior that frequently occur during indoor navigation. |
| [99] | ML | DT | A non-parametric classification algorithm with a tree-based representation that can accurately reflect the characteristics of the data. |
| [15] | ML | RF | A method that requires less training time, offers high precision, and promotes simplicity, thus suitable for recognition systems. |
| [28] | ML | GDA | Gradient descent algorithm reduces heading drift by combining inertial data with only a subset of reliable magnetometer data. |
| [115] | DL | ANN | A method that can learn and model complex, non-linear relationships. It can produce more accurate results than traditional machine learning techniques. |
| [1,30] | DL | CNN | A method effective in extracting features used in activity or gait recognition that can automatically learn appropriate features by combining feature extraction and classification with a neural network and can learn a non-linear relationship between feature vectors. |
| [100] | DL | RNN | An appropriate model to address time series data and significantly reduce the complexity of increasing parameters. It is ideal for automatic nonlinear feature extraction. |
| [111] | DL | LSTM | It is appropriate for dealing with time series data and capturing long-term dependencies in the data series. The hidden LSTM units can exploit temporal information in a magnetic field and light intensity data by recursively mapping the input sequence to the output label. |
| [4] | DL | NNs | NNs can play an essential role in minimizing the influence of heterogeneity of devices and improving indoor localization accuracy |
| [100] | Hybrid | Multiscale CNN-RNN | A model used to invert the effect of the CNN’s automatic feature extraction. |
| [21] | Hybrid | LSTM-RNN | The specific cell unit and gate structure can retain updated information from previous moments via loop feedback connection, thus making them widely appropriate for artificial disturbance reduction. |
| [122] | Hybrid | CNN-BLSTM | A technique used to obtain multi-layer features from a hybrid CNN/BLSTM network and to improve the recognition of human complicated activities. |
| [87] | others | GraphSLAM | The system automates this signal map creation method by considerably decreasing survey overhead. |
| [2] | Others | SFM | Based on a multi-constrained image-matching method, an SFM (Structure from Motion) based algorithm is developed to estimate heading angles and reconstruct trajectories. |
| [6] | Others | Trilateration method | A method may be used on any hardware platform and requires no additional hardware or infrastructure. |
| [8] | Others | map-matching | A map-matching method based on particle filters is used to handle the problem of predicted pedestrian paths travelling through building walls |
| [3,9,10,17] | Others | PDR | The method avoids the PDR cumulative error problem while mitigating the impact of RSSI oscillations and instability encountered in indoor situations. |
| [12] | Others | ScHS | To enable real-time synchronization, the step-constrained hybrid synchronization (ScHS) method employs an online Dynamic Time Warping (DTW) algorithm and a modified (DTW) method to calibrate alignment drift. It achieves consistent and accurate synchronization of two signals. |
| [13] | Others | WPL | The weighted path loss (WPL) method is more appropriate than the popular fingerprinting approach, which involves manually gathering a large dataset for training. |
| [63,73] | Others | Maximum Likelihood | The Maximum Likelihood estimate is used in indoor localization to determine the user’s location. |
| [125] | Others | backtracking approach | It is used to undo incorrect correction decisions and review previous user trajectory measurements to determine the most likely current location of the user. |
| [93] | Others | PDR with Particle Filter | The technology provides long-term precise and reliable tracking and is drift-free |
| [105] | Others | PDR with Kalman filter | To create a strong and precise indoor localization system, which was then used to estimate key important parameters of the PDR technique. |
| Ref. | Environment | Technology | Sensor | No. of AP | No of Participants | Test Coverage Space |
|---|---|---|---|---|---|---|
| [59] | Campus buildings | Wi-Fi | N/A | N/A | N/A | 1000 m2 1200 m2 1500 m2 |
| [65] | University | Wi-Fi | N/A | 64 AP | N/A | N/A |
| [66] | Engineering Buildings Tunnel system | Wi-Fi, IMU | Acc, Mag, Gyr | 33 AP | N/A | N/A |
| [67] | Museum. | Wi-Fi, IMU | Bar, Acc | 42 beacons | N/A | 2500 m2 |
| [68] | Office | Wi-Fi, IMU | Acc, Gyr, Mag | 11 AP | N/A | 11 m by (12.4 m/10 m) by 3 m |
| [61] | N/A | Wi-Fi | N/A | 6 AP | N/A | 15 by 5 m |
| [69] | Shopping malls | Wi-Fi, IMU | Gyr, Acc | 50 AP | 1 | 119,685 m2 |
| [70] | Office | Wi-Fi, IMU | Acc, Gyr, Mag | 8 AP | N/A | 43.5 m by 11.2 m |
| [14] | Office | Wi-Fi | N/A | 5 AP | N/A | 183.68 m2 |
| [71] | Rectangular motion Linear motion Corridor | Wi-Fi (RSSI), &IMU | Acc Gyr, Mag | 4 AP | 1 | 45 m by 37 m. 75 m by 3 m |
| [72] | Office room | Wi-Fi, IMU | Acc, Gyr, Mag | 4 | 4 | N/A |
| [63] | University | Wi-Fi | N/A | 20 AP | N/A | 80 m by 40 m |
| [73] | Office Shopping center Hall | Wi-Fi, IMU | Acc, digital compass | 103, 25 and 35 AP | N/A | 90 m by 10 m 115 m by 25 m 50 m by 15 m |
| [106] | Indoor corridor and office | BLU | Acc, Mag | 12 beacons | N/A | 42.2 m by 21.0 m |
| [8] | 2D paths in indoor corridor. 3D paths, six flights of stairs, and four sets of horizontal trajectories | MEMS | Acc, Mag, Gyr, Bar | N/A | 5 | Corridor at 92.46 m length with four 90 degree turns. The walking distance was 174.63 m. The estimated walking distance in 3D space was 363.22 |
| [94] | Office | IMU | Acc, Gyr, Bar, compass | N/A | 3 2 | 365 m 345 m |
| [17] | University | Wi-Fi, IMU | Acc Mag | 4 AP | 1 | 30 m by 20 m |
| [77] | University | Magnetic, Wi-Fi | Acc, Mag | 242 AP | N/A | 13.4 m by 6.4 m |
| [28] | University | IMU | Acc, Gyr, Mag | N/A | 1 | 37.80 m 452.00 m 858.00 m |
| [27] | University | IMU | Acc, Mag, Gyr | N/A | 1 | N/A |
| [96] | University | BLE | Acc, Mag | 8 Beacon | N/A | 25 m by 15 m |
| [23] | Institute of Science and Technology | IMU | Acc, Mag, Gyr | N/A | 5 | 168.55 m |
| [15] | University | IMU | Mag, Acc | N/A | 8 | N/A |
| [98] | Office Shopping mall. | IMU | Acc, Gyr, Mag, Bar | N/A | 4 | 52.5 m by 52.5 m 80 m by 60 m |
| [82] | University | BLU, Wi-Fi | Acc, Gyr, Mag, Bar | N/A | N/A | 145 m to 260 m |
| [99] | Office | IMU | Acc, Gyr, Mag | N/A | 10 | 700 m |
| [30] | N/A | IMU | Acc, Gyr, Mag | N/A | 77 | N/A |
| [32] | N/A | IMU | Acc, Mag, Gyr, Bar | N/A | 10 | N/A |
| [100] | N/A | IMU, GPS | Acc | N/A | 9 | 60 m |
| [104] | Office | BLU | N/A | 20,8 beacons | N/A | 60 m by 40 m |
| [29] | University | IMU | Acc, Gyr, Mag, Cam | N/A | 5 | 207 m |
| [1] | University | Magnetic | Acc, Gyr Mag, Cam | N/A | N/A | 90 by 36 m2 |
| [10] | Office Straight corridor Multi path | BLE | Acc, Gyr, | N/A | 5 15 | 10 m 124 m 100 m |
| [97] | University | IMU | Acc, Gyr, Mag, Cam | N/A | 6 | 106 m 207 m |
| [93] | Rooms Corridor | RFID | Acc, Gyr | N/A | 10 | N/A |
| [101] | office | IMU | Acc, Gyr, Mag | N/A | 3 | 18 m by12 m |
| [127] | N/A | Magnetic | GPS, Acc, Bar, light, | N/A | 15 | 200 m by 200 m |
| [128] | Office | MEMS | Acc, Gyr, Mag | N/A | 4 | 124 m2 |
| [129] | Corridor | MEMS | Acc, Mag, Gyr, Bar | N/A | 3 | 118 m |
| Ref. | Walking Patterns | Phone Poses | ||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Standing | Walking | Door (Pushing, Pulling) | Looking Around | Running | Satir (Up, Down) | Elevator (Up, Down) | Escalator (Up, Down) | Turning | Jogging | Jumping | In Hand | In pocket | Calling | Texting | Swinging | portable Desk | In Front | |
| [59] | - | √ | - | - | - | - | - | - | - | - | - | √ | - | - | - | - | √ | - |
| [65] | - | √ | - | - | - | - | - | - | √ | - | - | √ | - | - | - | - | - | - |
| [66] | - | √ | - | - | - | - | - | - | √ | - | - | √ | - | - | - | - | - | - |
| [67] | √ | √ | - | - | - | √ | - | - | - | - | - | √ | - | - | - | - | - | - |
| [68] | - | √ | - | - | - | - | - | - | - | - | - | √ | - | - | - | - | - | - |
| [69] | - | √ | - | - | - | - | - | - | - | - | - | √ | √ | √ | - | √ | - | - |
| [71] | - | √ | - | - | - | - | - | - | - | - | - | √ | - | - | - | - | - | - |
| [8] | - | √ | - | - | - | √ | - | - | - | - | - | - | √ | - | - | - | - | - |
| [15] | √ | √ | - | - | √ | - | - | - | - | - | - | √ | √ | - | - | - | - | - |
| [100] | - | √ | - | - | - | - | - | - | - | - | √ | √ | - | - | √ | - | - | |
| [99] | - | √ | - | - | √ | √ | - | - | - | - | - | √ | √ | √ | - | √ | - | - |
| [101] | - | √ | - | - | √ | - | - | - | √ | - | - | √ | √ | √ | √ | - | - | - |
| [32] | √ | √ | - | - | √ | √ | √ | √ | √ | - | - | - | - | - | - | - | - | - |
| [12] | - | √ | - | - | - | √ | - | - | √ | - | - | √ | - | - | - | - | - | - |
| [129] | - | - | - | - | - | √ | - | - | - | - | √ | - | - | - | - | - | - | |
| [31] | √ | √ | √ | √ | - | - | - | - | √ | - | - | - | √ | √ | - | √ | - | √ |
| [131] | √ | √ | - | - | - | - | - | - | - | - | - | √ | - | - | - | - | - | - |
| [130] | - | √ | - | - | - | - | - | - | - | - | - | √ | - | - | - | - | - | - |
| [26] | √ | √ | - | - | - | √ | - | - | - | √ | √ | - | - | - | - | - | - | - |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Naser, R.S.; Lam, M.C.; Qamar, F.; Zaidan, B.B. Smartphone-Based Indoor Localization Systems: A Systematic Literature Review. Electronics 2023, 12, 1814. https://doi.org/10.3390/electronics12081814
Naser RS, Lam MC, Qamar F, Zaidan BB. Smartphone-Based Indoor Localization Systems: A Systematic Literature Review. Electronics. 2023; 12(8):1814. https://doi.org/10.3390/electronics12081814
Chicago/Turabian StyleNaser, Rana Sabah, Meng Chun Lam, Faizan Qamar, and B. B. Zaidan. 2023. "Smartphone-Based Indoor Localization Systems: A Systematic Literature Review" Electronics 12, no. 8: 1814. https://doi.org/10.3390/electronics12081814
APA StyleNaser, R. S., Lam, M. C., Qamar, F., & Zaidan, B. B. (2023). Smartphone-Based Indoor Localization Systems: A Systematic Literature Review. Electronics, 12(8), 1814. https://doi.org/10.3390/electronics12081814