


Development and Experimental Validation of Control Algorithm for Person-Following Autonomous Robots
 ,
,  and
and
Abstract
:
1. Introduction
2. Related Works
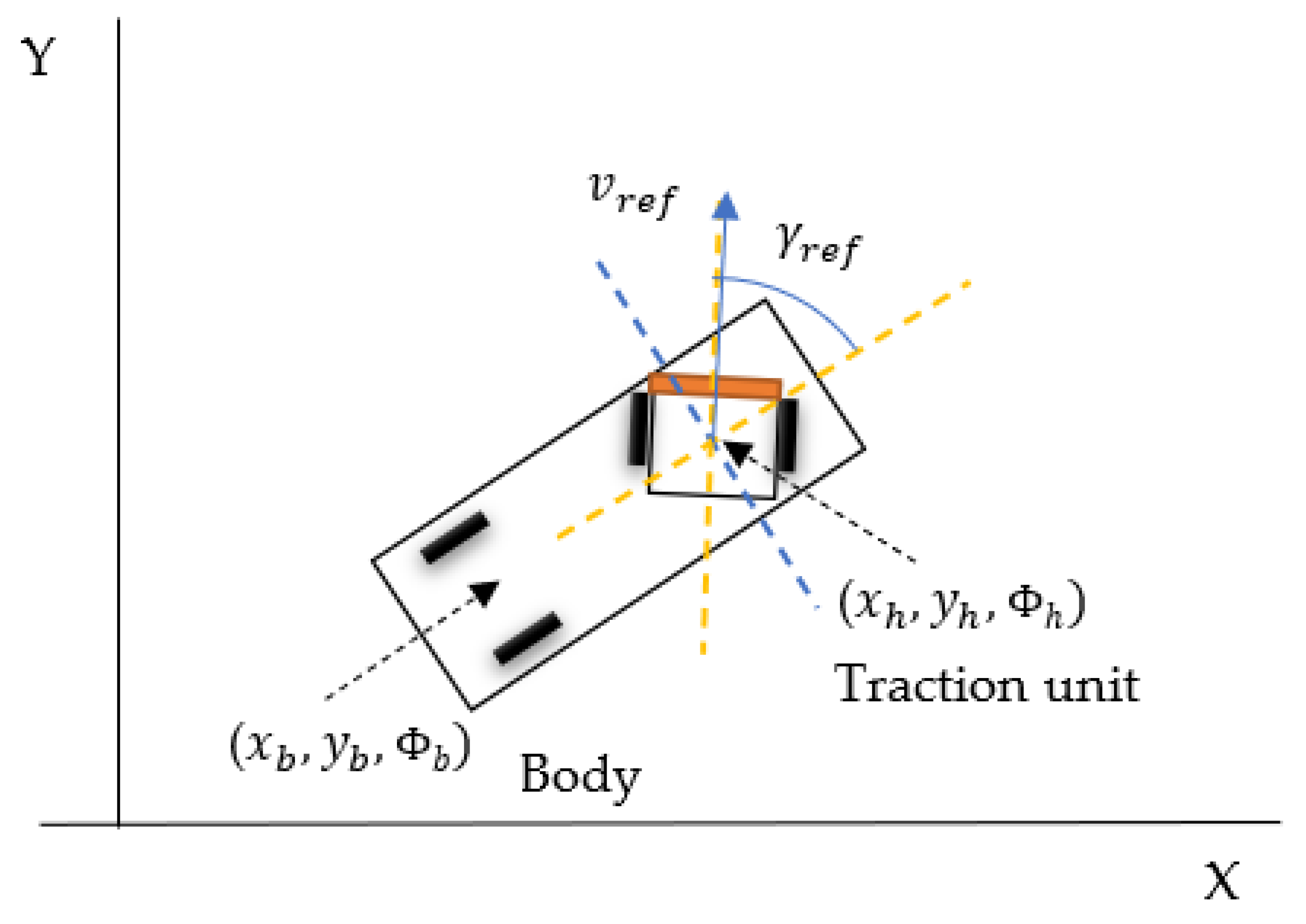
3. Model of the System
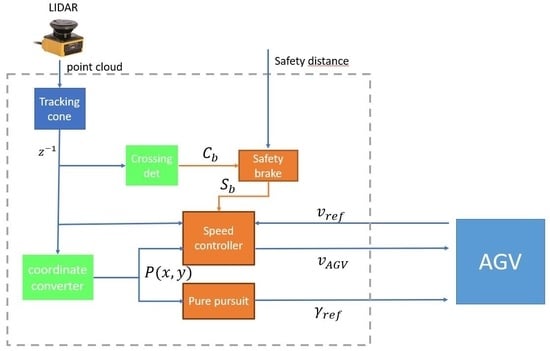
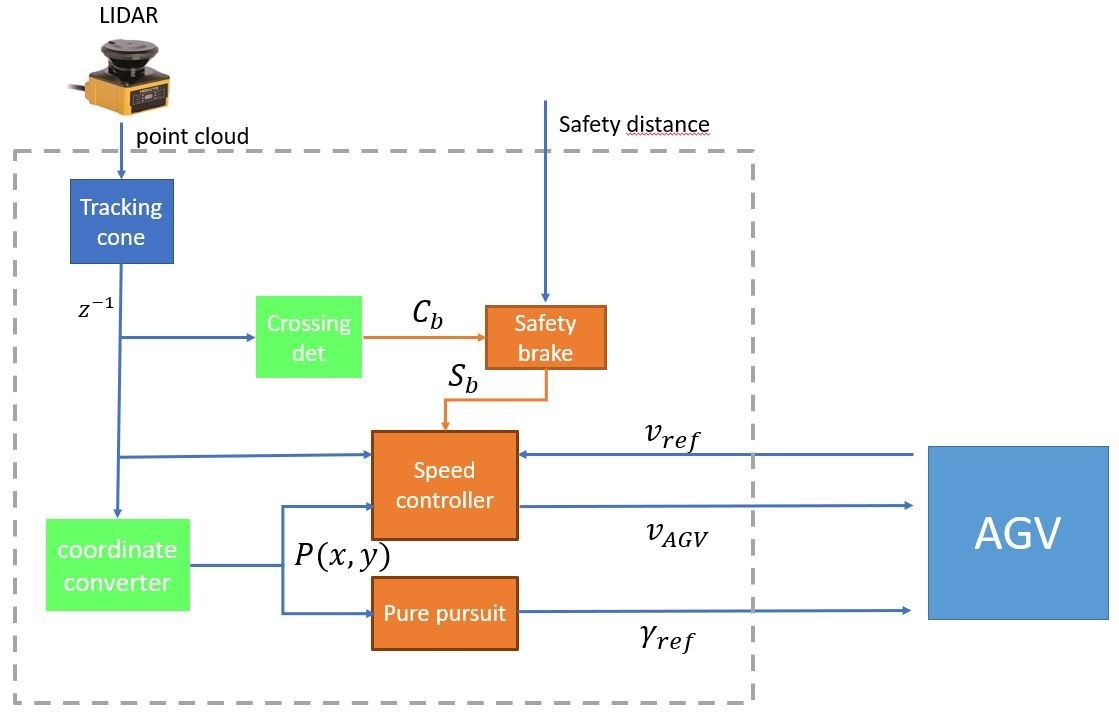
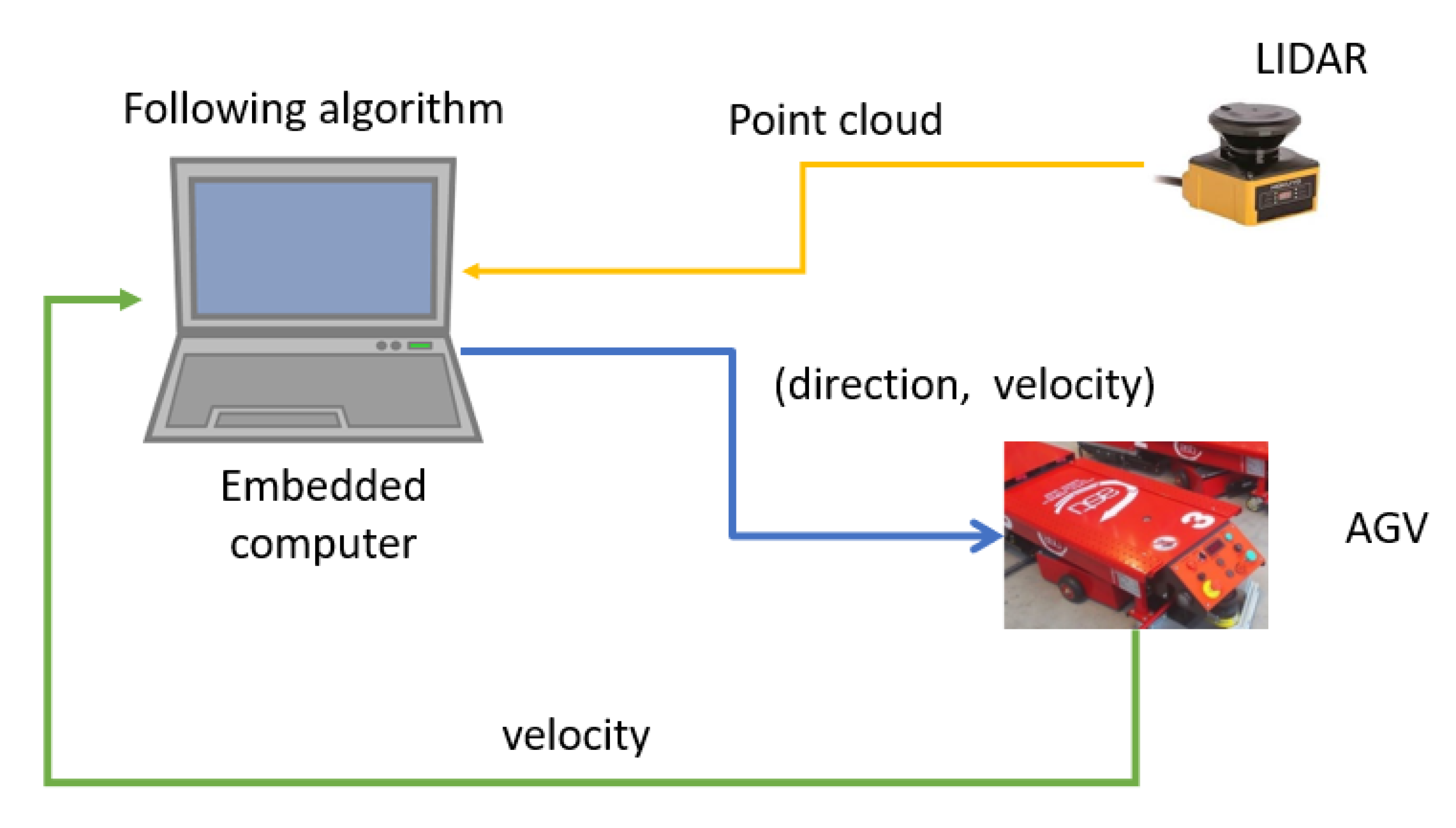
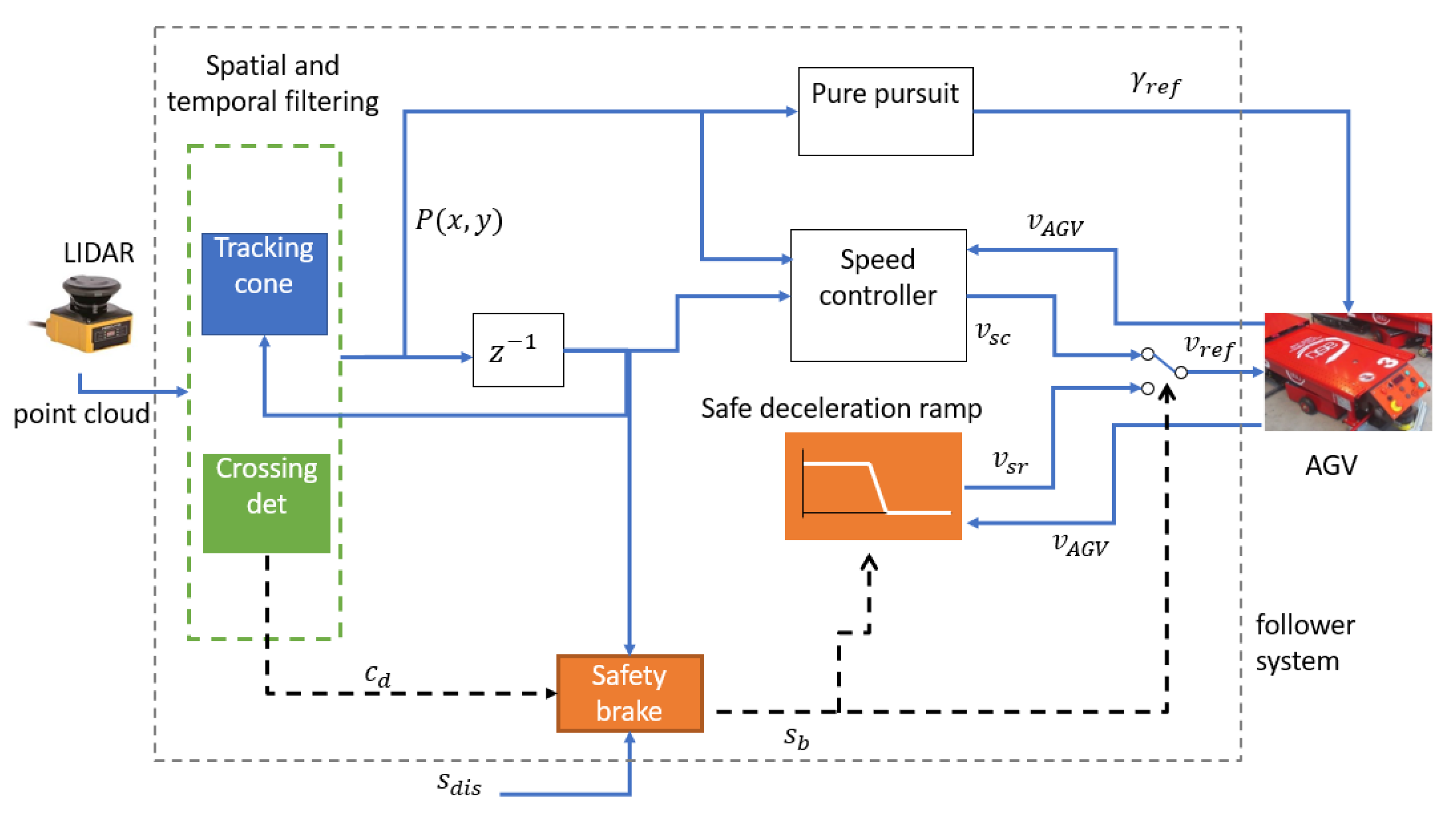
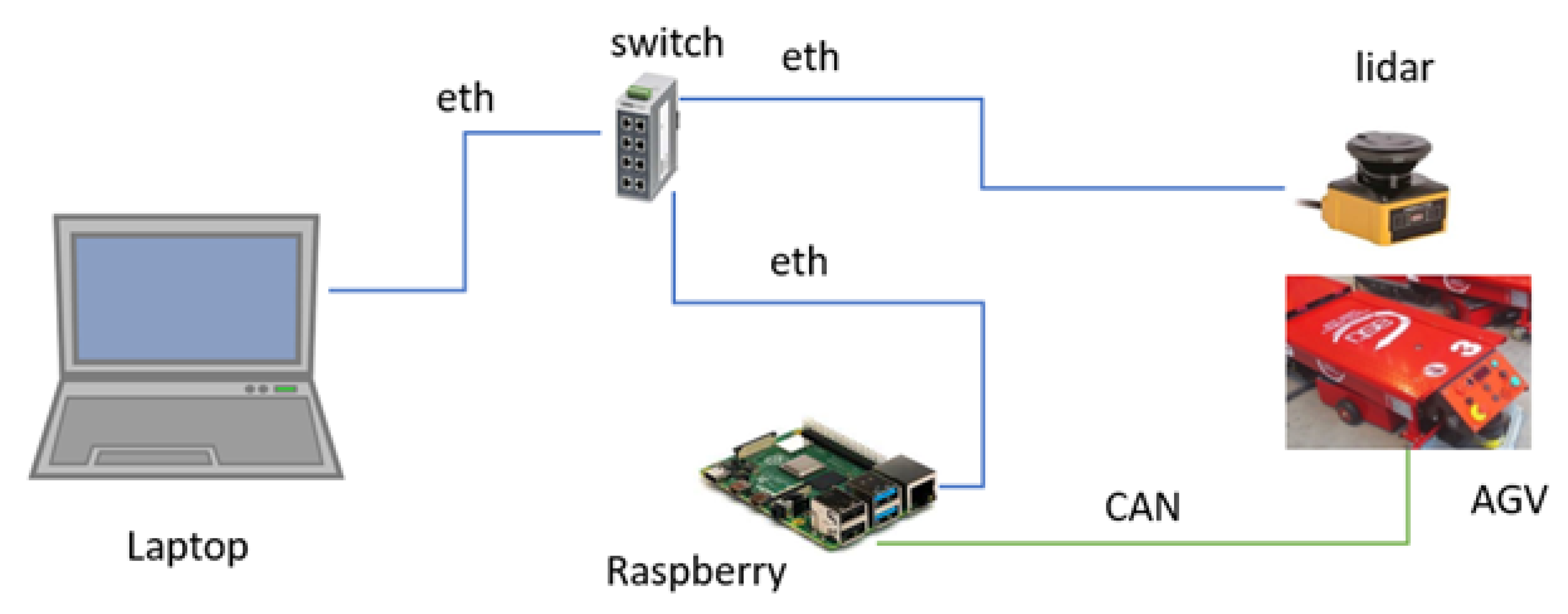
4. Description of the Control Architecture
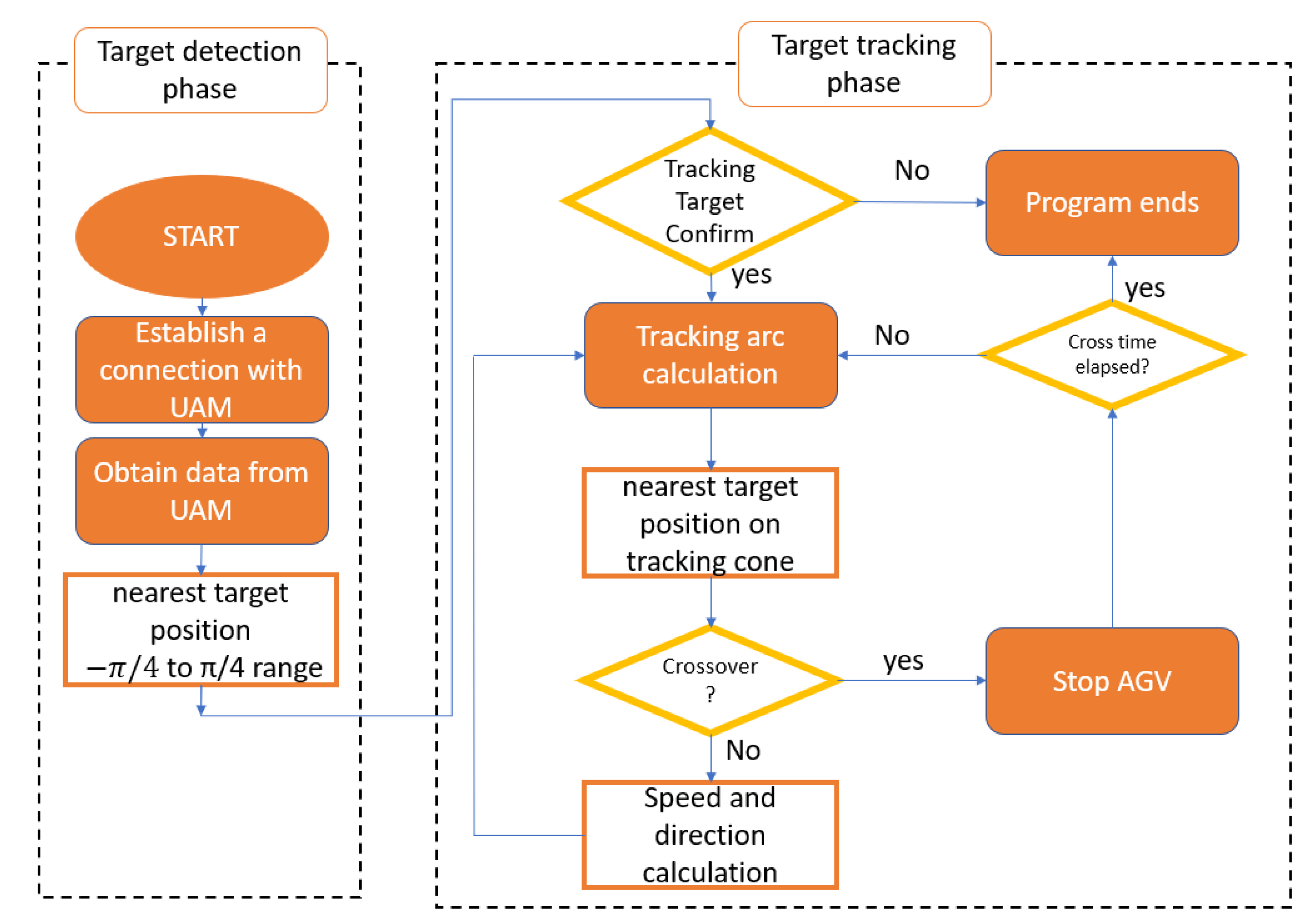
5. Human-Following Algorithm
5.1. General Description
| Algorithm 1. Human-following algorithm. |
| While {< }{%Detection phase While {= }{ }end While While { }{ %Tracking phase , If then = 0 = Else{ }End If }end While }end While |
5.2. Target Detection, Filtering, and Tracking
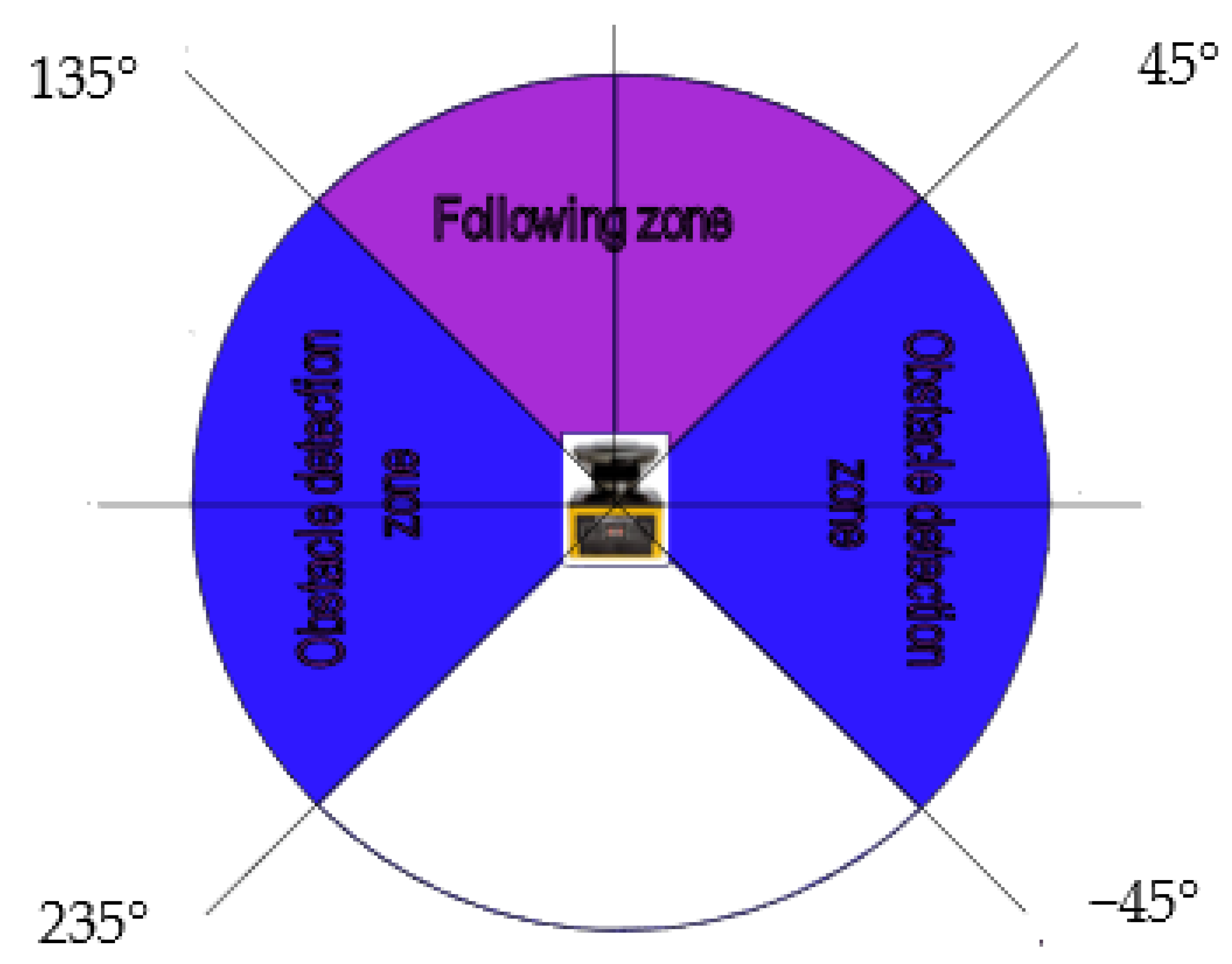
5.2.1. Target Detection
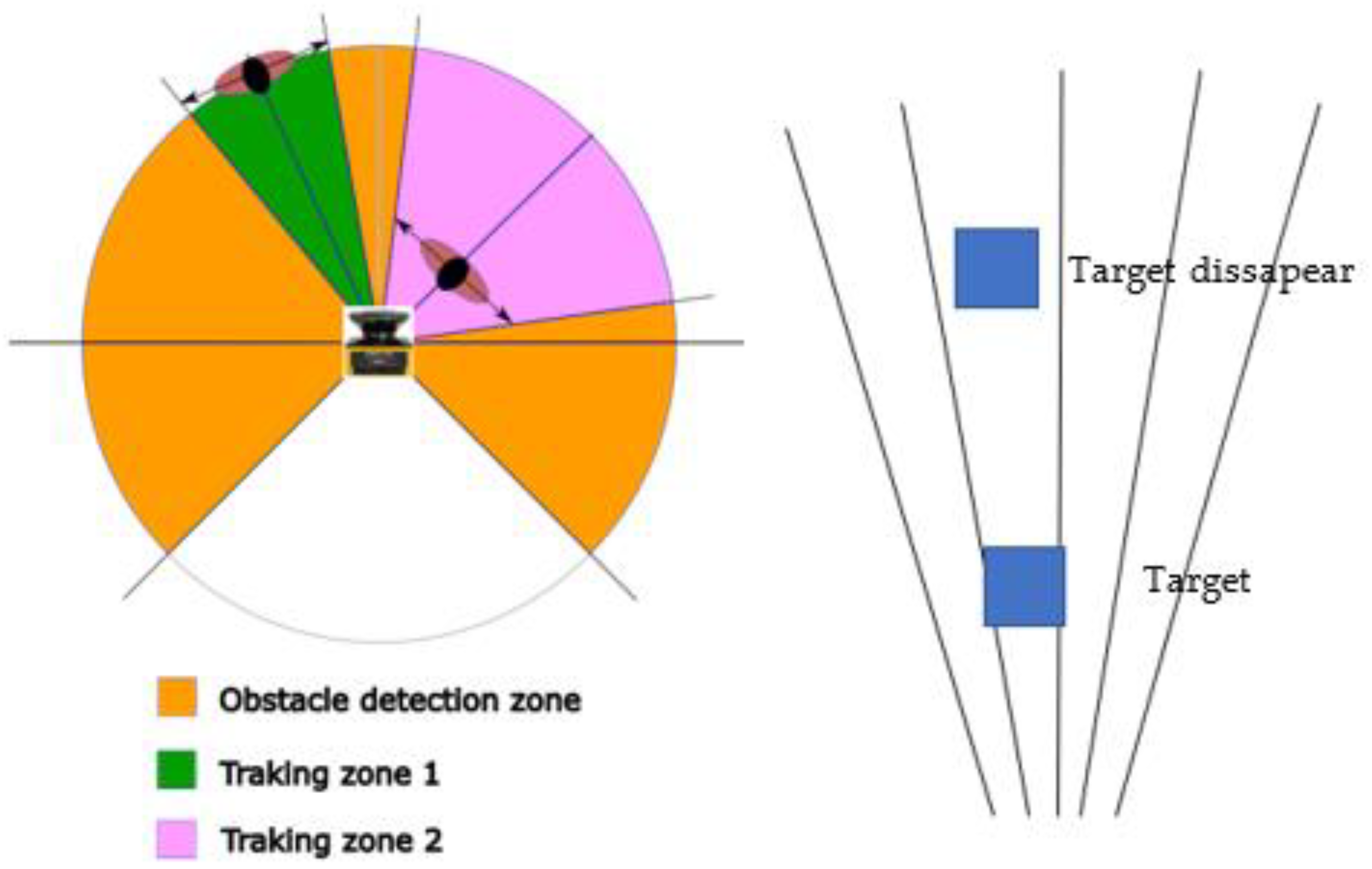
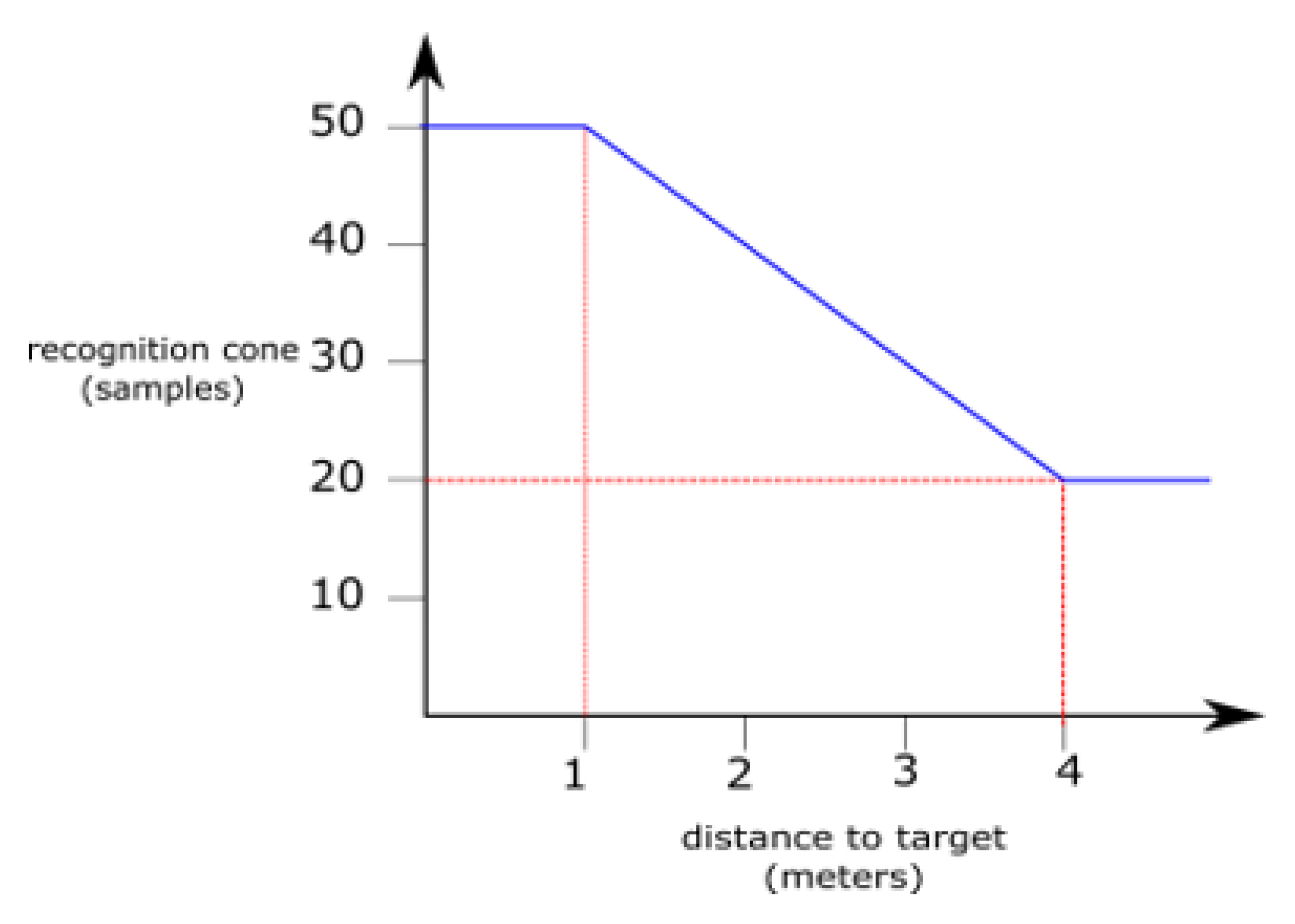
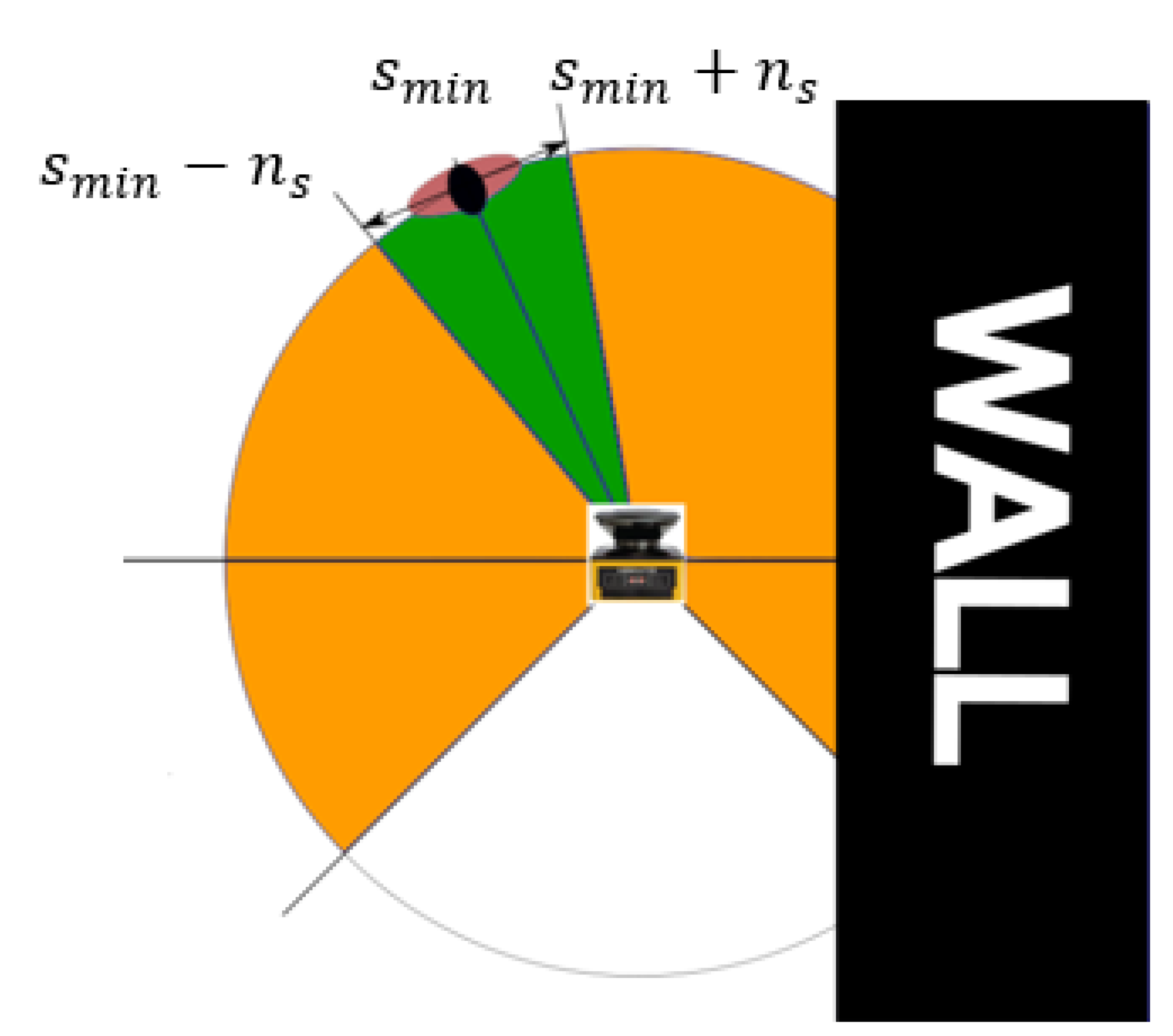
5.2.2. Target Tracking
- The human to be tracked has a detectable thickness greater than 10 cm;
- The human to be tracked does not move at too high a speed; we can assume that it is not higher than 1.5 m/s;
- The laser has a scanning frequency of 30 ms, so it performs about 33.3 scans per second.
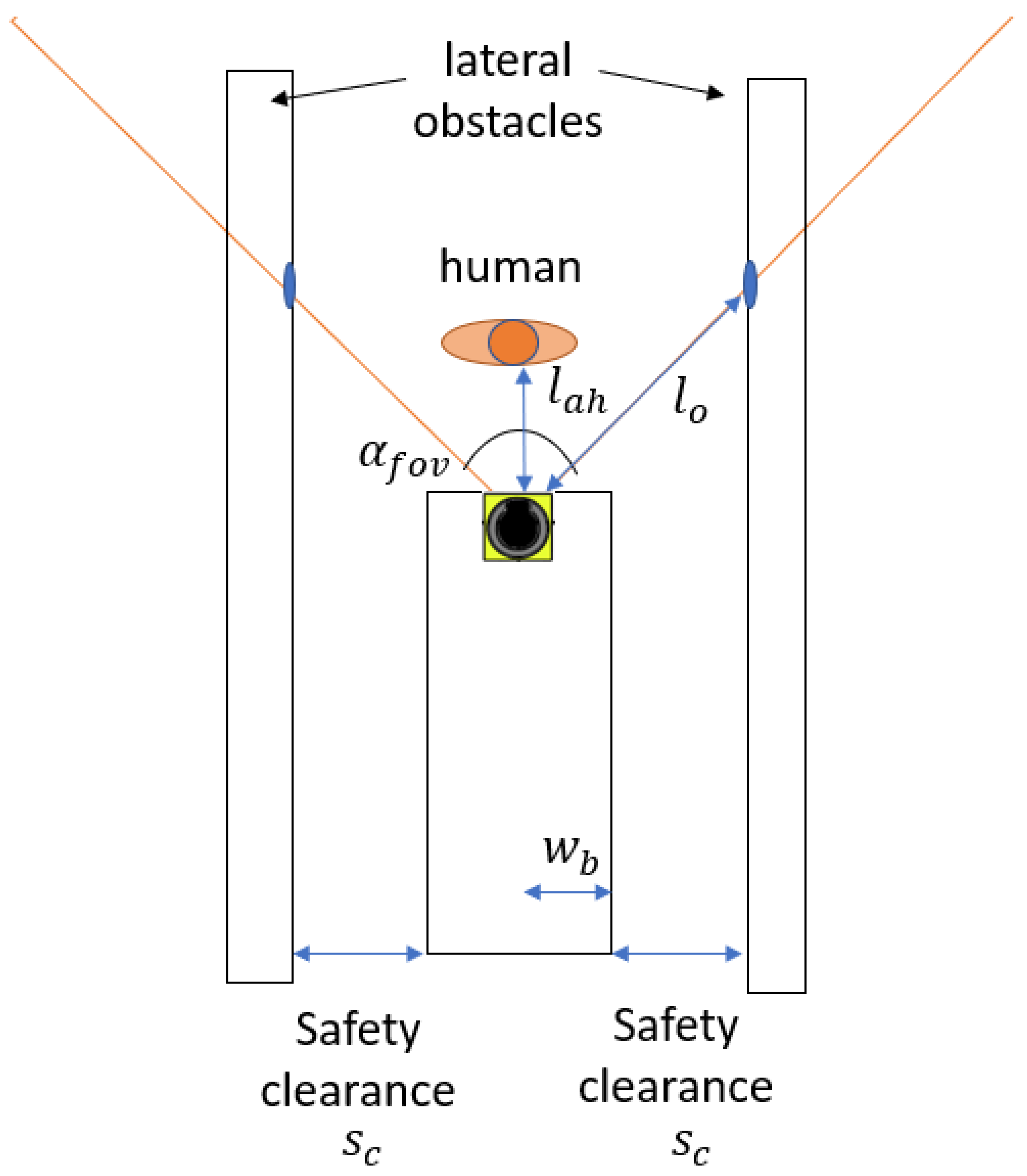
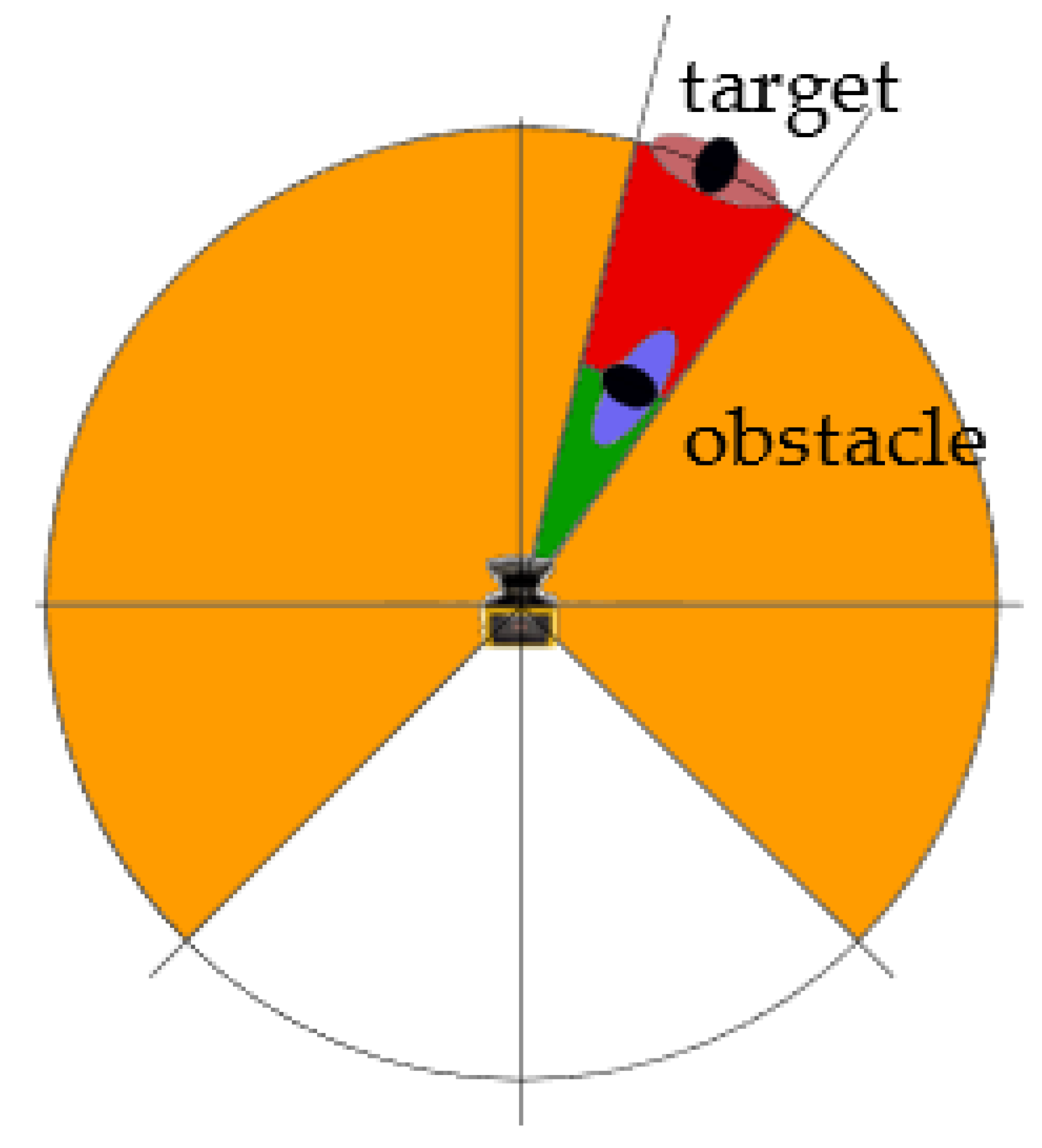
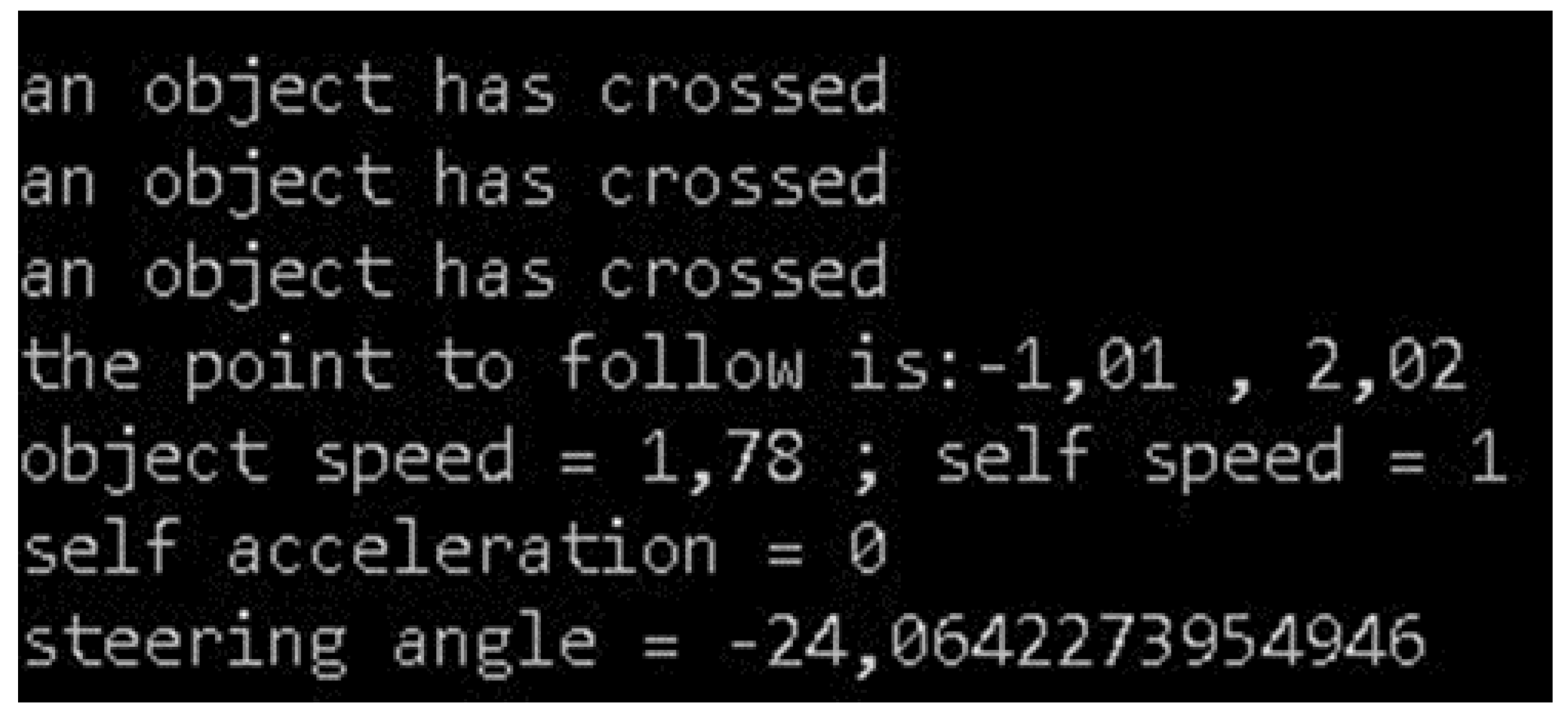
5.2.3. Crossing Detection
5.3. Generation of Control References for Velocity and Direction
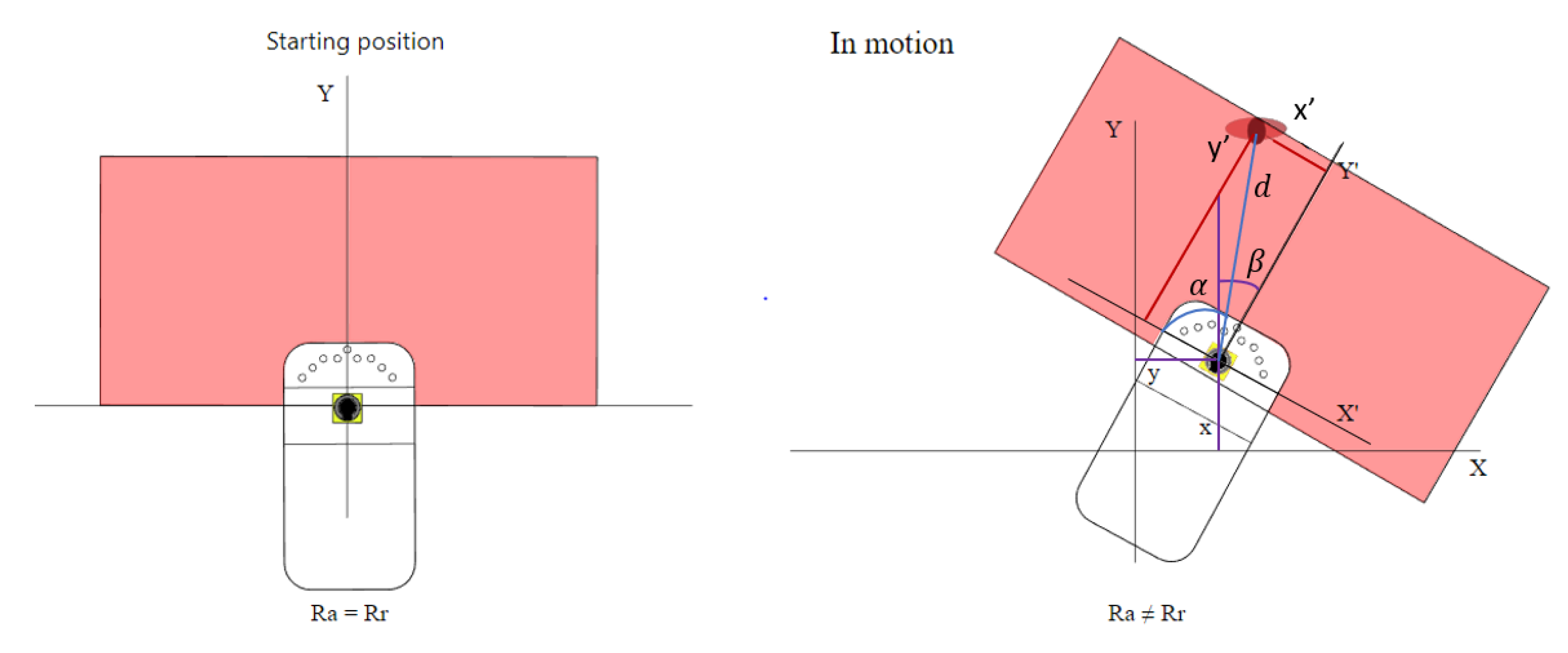
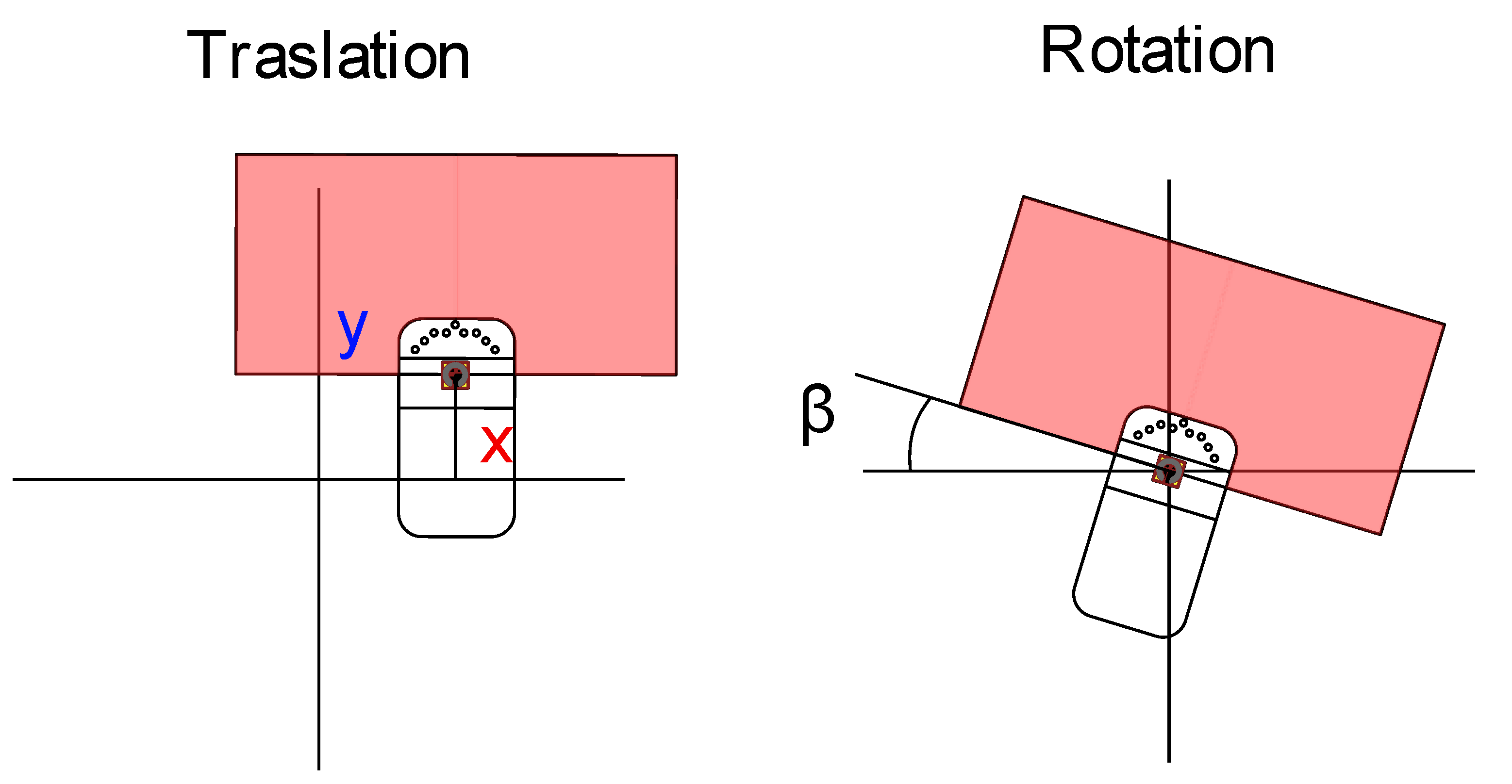
5.3.1. Position
5.3.2. Reference of the Velocity
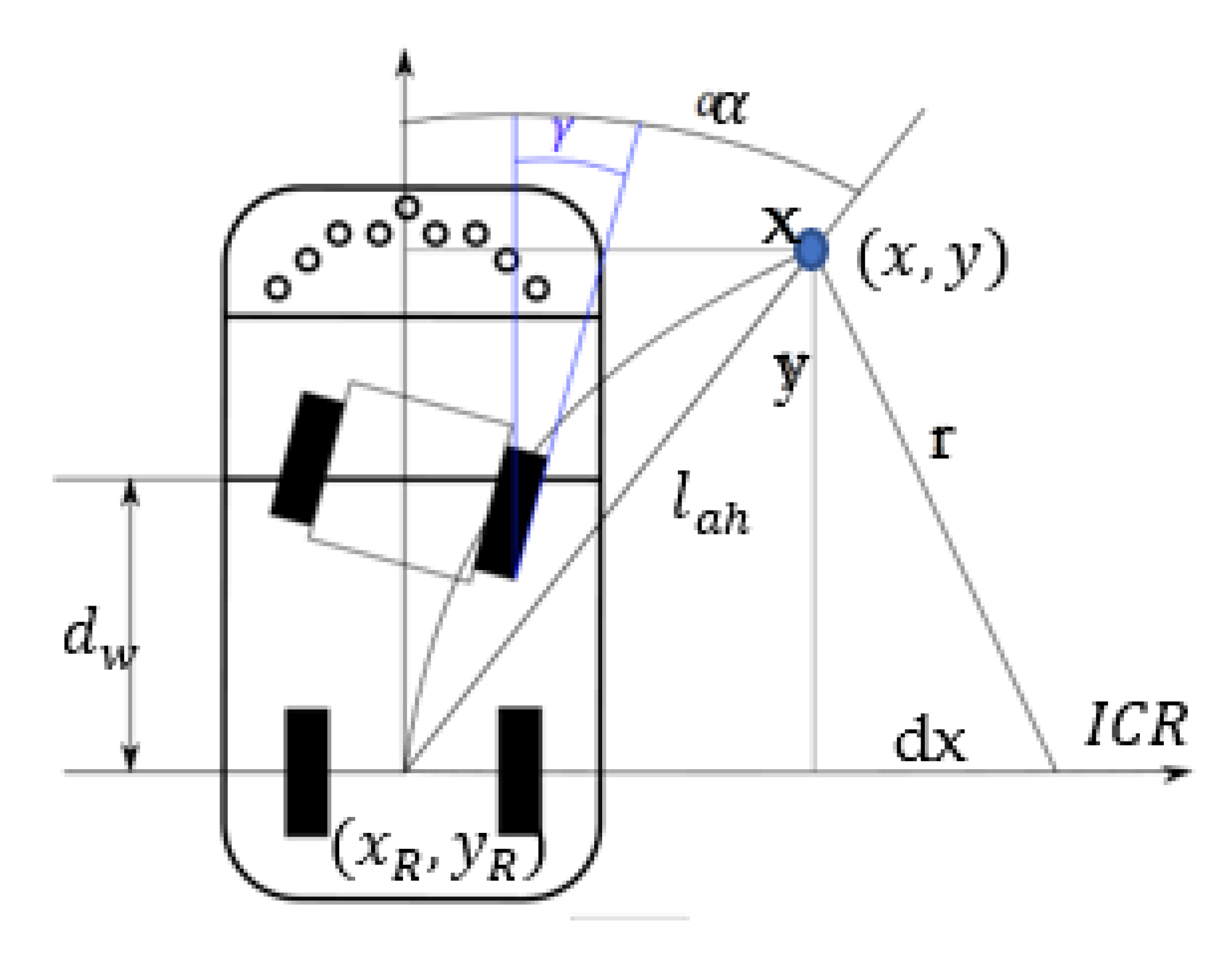
5.3.3. Reference for the Direction
6. Results and Discussion
6.1. Static Tests
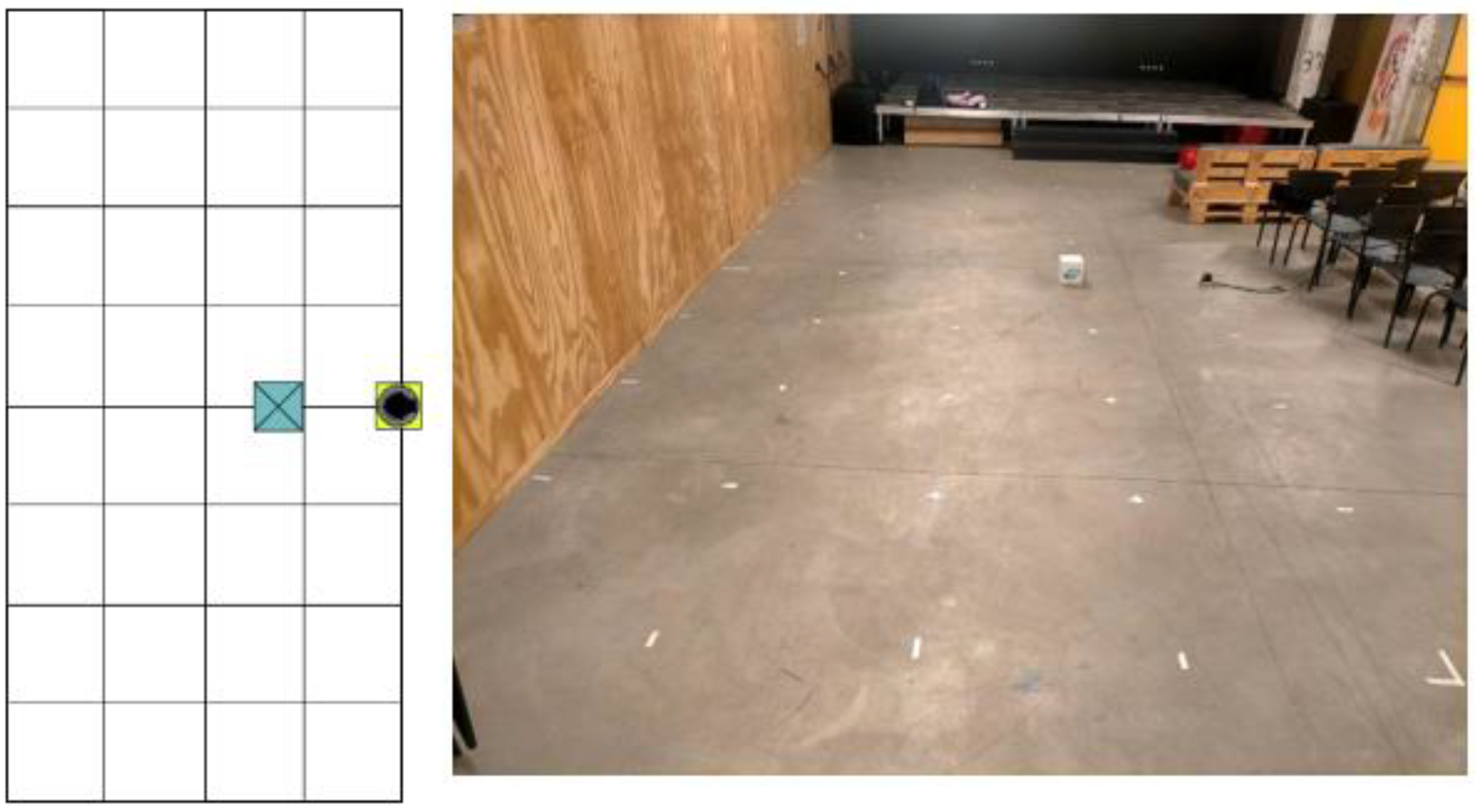
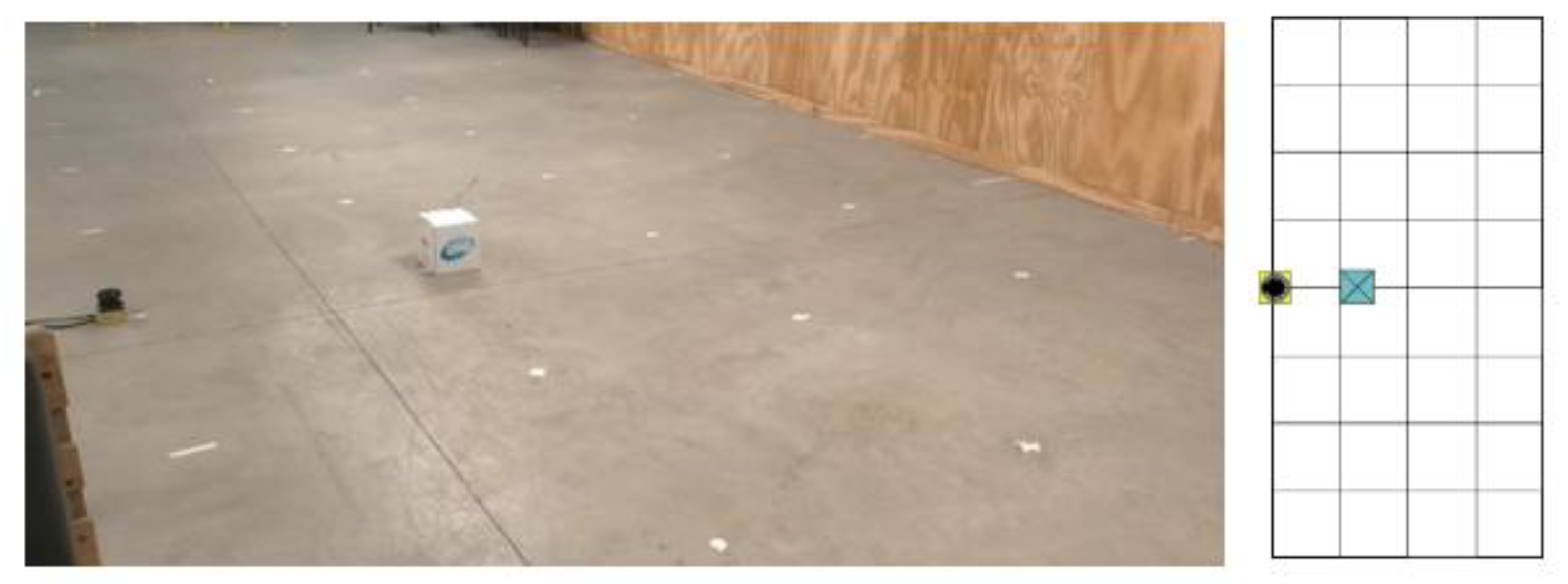
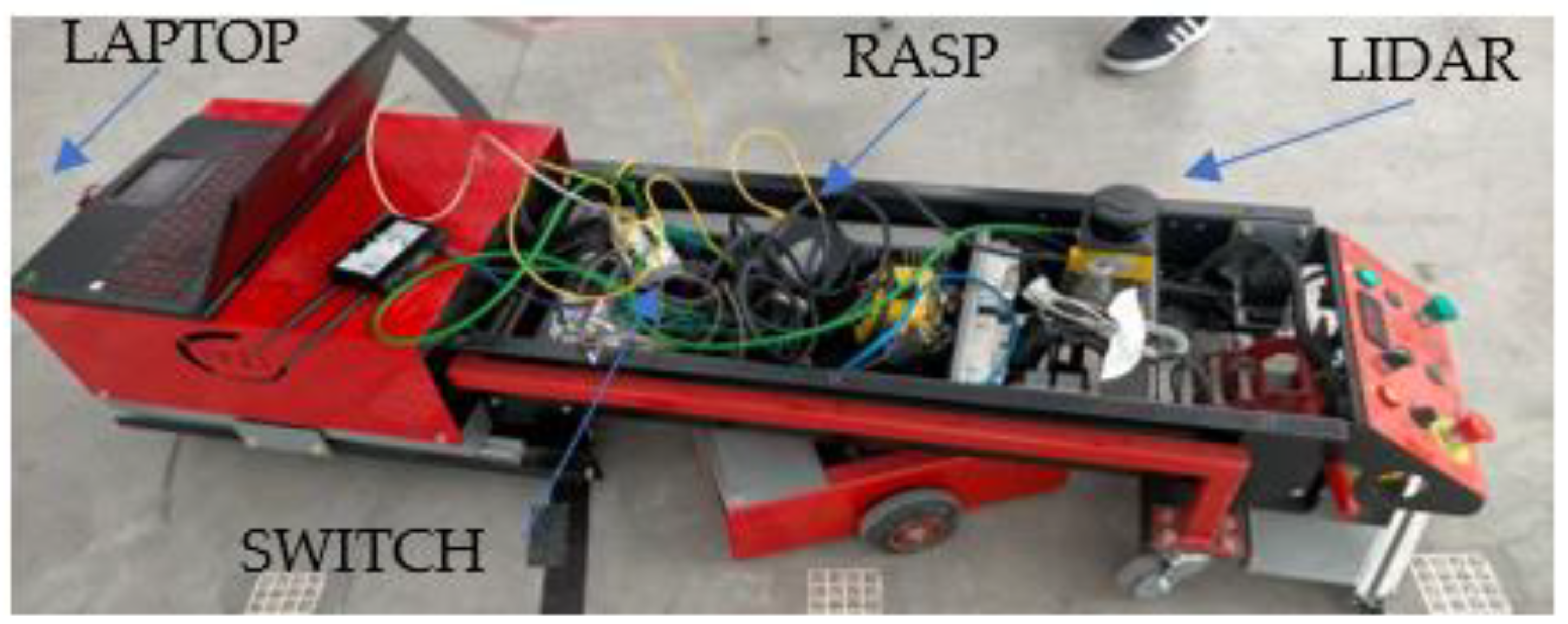
6.1.1. Setup of the Experimental Scenario
6.1.2. Description of the Tests
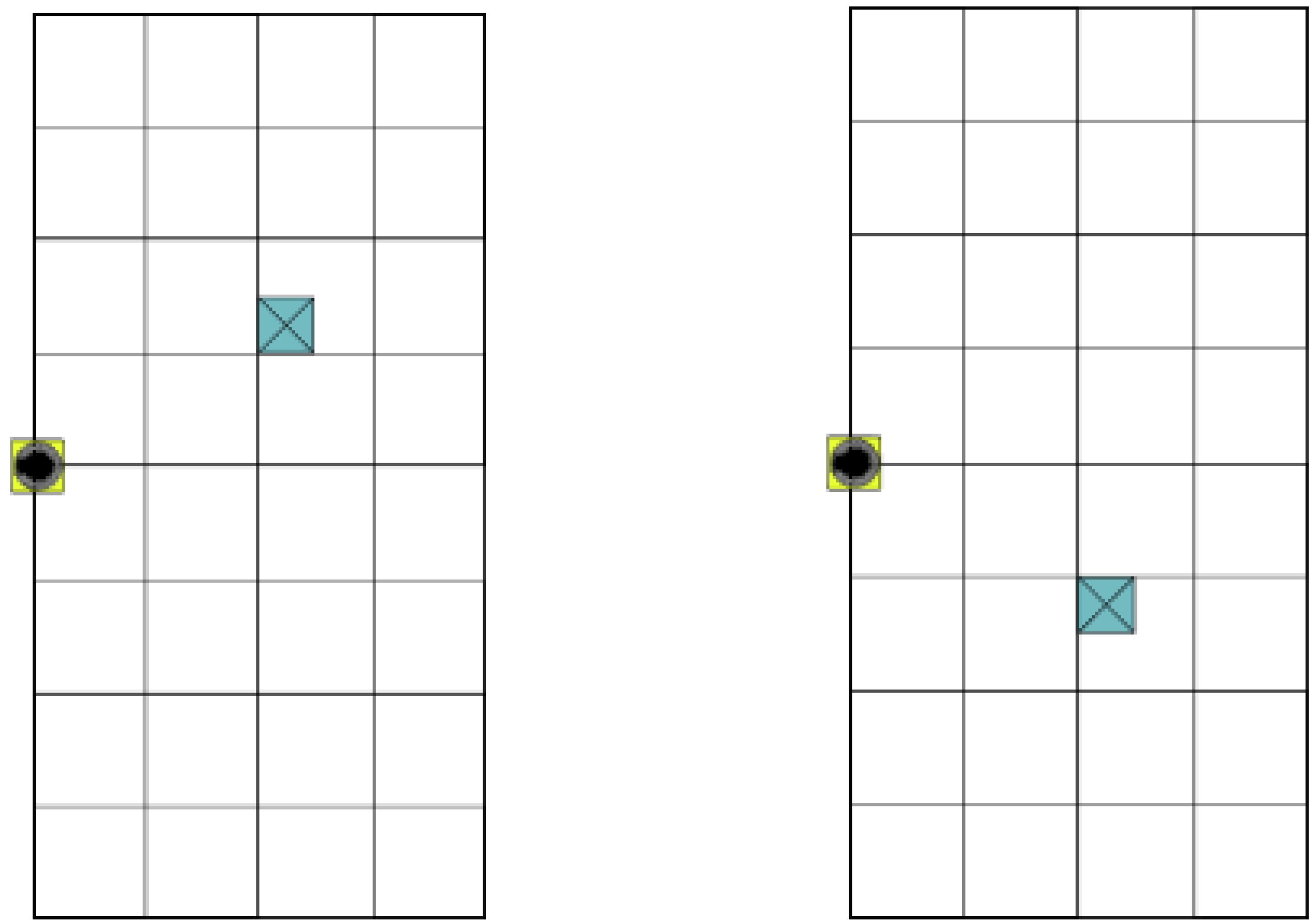
6.1.3. Position Test
6.1.4. Tracking Test
6.1.5. Crossing Test
6.1.6. Interpretation of Results
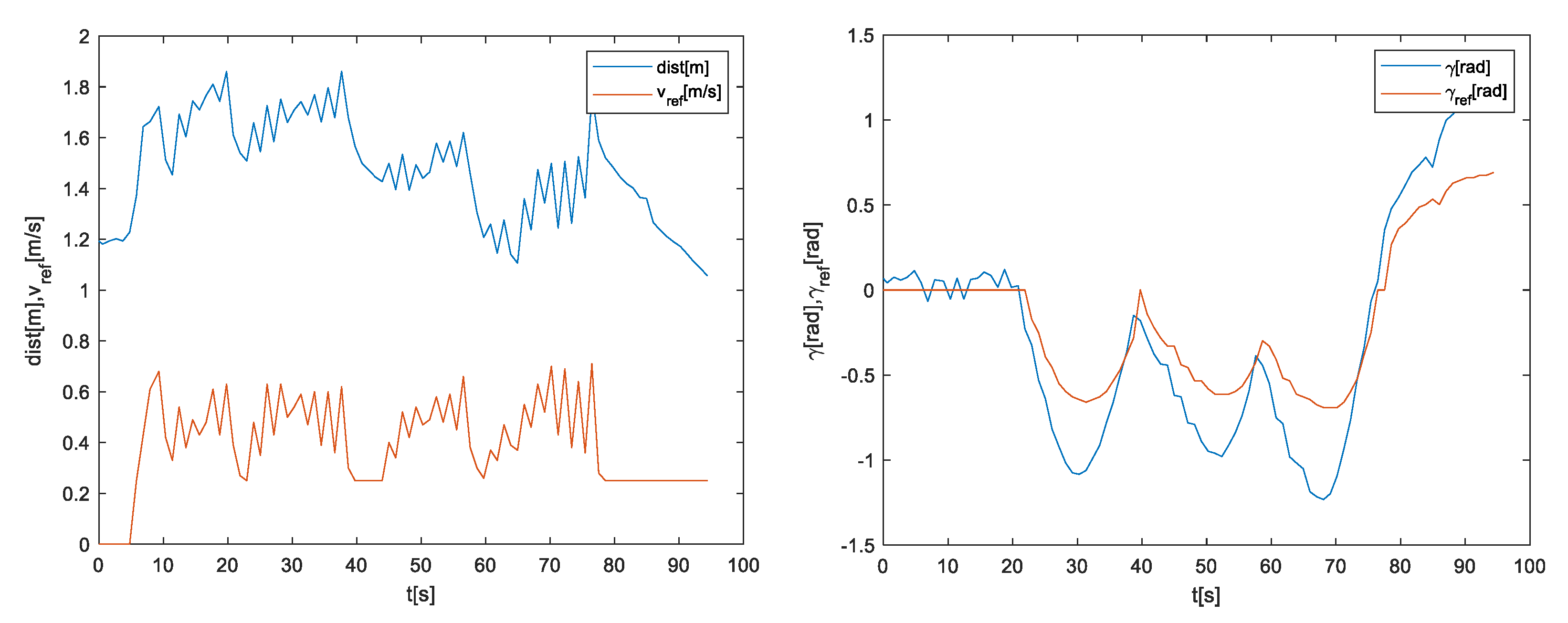
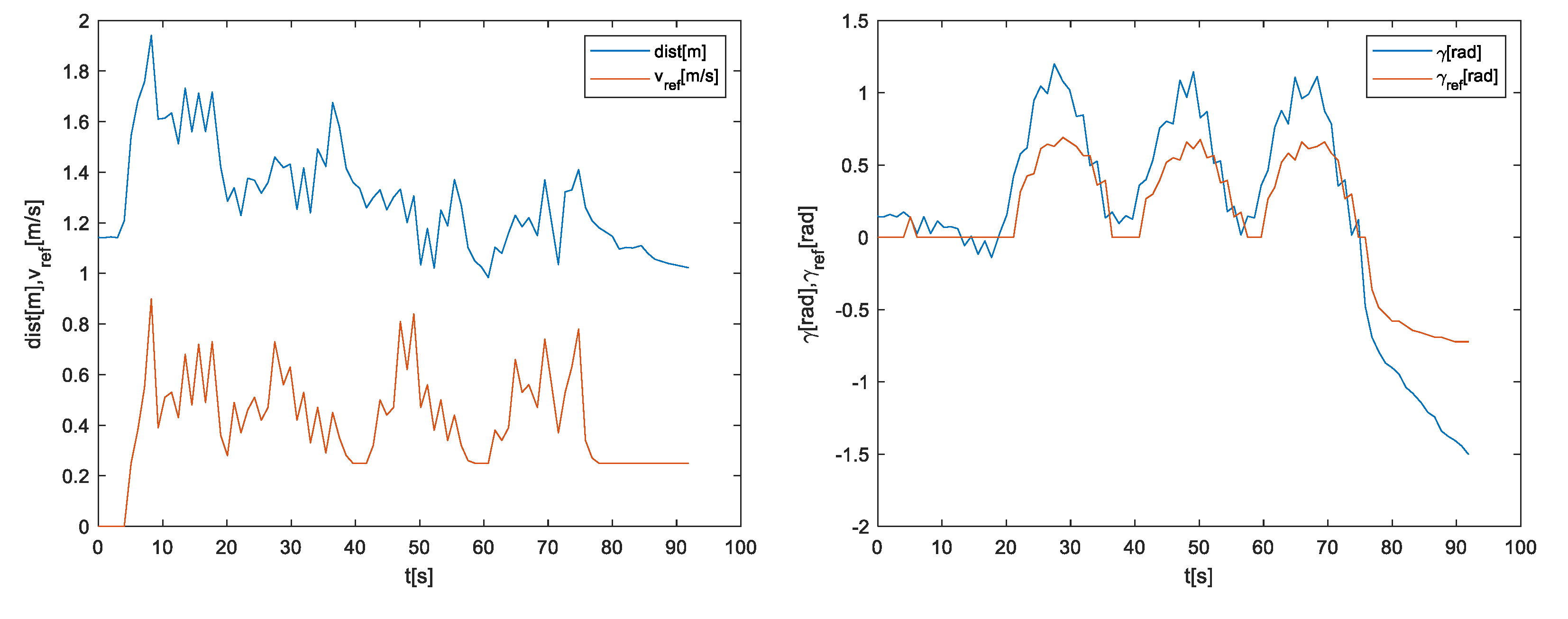
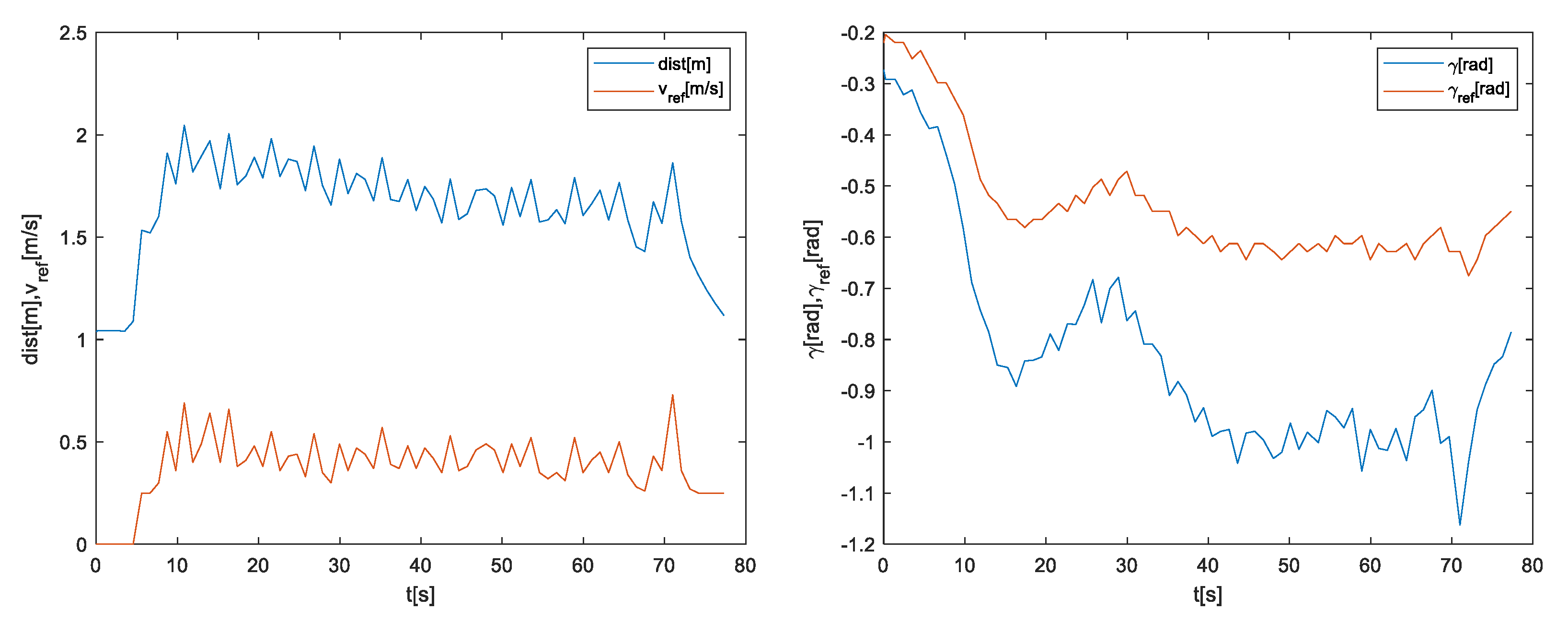
6.2. Dynamic Tests
Performance Evaluation of the AGV with Different Trajectories
7. Conclusions and Future Works
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| AGV | Automated Guided Vehicle |
| CAN | Controller Area Network |
| ICR | Instantaneous Center of Rotation |
| LIDAR | Light Detection and Ranging |
| PID | Proportional Integral Derivative |
| RLC | Reinforcement Learning based Control |
| UDP | User Datagram Protocol (UDP) |
| UWB | Ultra Wide Band |
References
- Echeto, J.; Santos, M.; Romana, M.G. Automated vehicles in swarm configuration: Simulation and analysis. Neurocomputing 2022, 501, 679–693. [Google Scholar] [CrossRef]
- Dintén, R.; López Martínez, P.; Zorrilla, M. Arquitectura de referencia para el diseño y desarrollo de aplicaciones para la Industria 4.0. Rev. Iberoam. Automática Inf. Ind. 2021, 18, 300–311. [Google Scholar] [CrossRef]
- Espinosa, F.; Santos, C.; Sierra-García, J.E. Transporte multi-AGV de una carga: Estado del arte y propuesta centralizada. Rev. Iberoam. Automática Inf. Ind. 2020, 18, 82–91. [Google Scholar] [CrossRef]
- Sierra-Garcia, J.E.; Santos, M. Combining reinforcement learning and conventional control to improve automatic guided vehicles tracking of complex trajectories. Expert Syst. 2022, e13076. [Google Scholar] [CrossRef]
- Wen, R.; Yuan, K.; Wang, Q.; Heng, S.; Li, Z. Force-guided high-precision grasping control of fragile and deformable objects using semg-based force prediction. IEEE Robot. Autom. Lett. 2020, 5, 2762–2769. [Google Scholar] [CrossRef]
- Sánchez, R.; Sierra-García, J.E.; Santos, M. Modelado de un AGV híbrido triciclo-diferencial. Rev. Iberoam. Automática Inf. Ind. 2022, 19, 84–95. [Google Scholar] [CrossRef]
- Zamora-Cadenas, L.; Velez, I.; Sierra-Garcia, J.E. UWB-based safety system for autonomous guided vehicles without hardware on the infrastructure. IEEE Access 2021, 9, 96430–96443. [Google Scholar] [CrossRef]
- Sandberg, A.; Sands, T. Autonomous trajectory generation algorithms for spacecraft slew maneuvers. Aerospace 2022, 9, 135. [Google Scholar] [CrossRef]
- Raigoza, K.; Sands, T. Autonomous trajectory generation comparison for de-orbiting with multiple collision avoidance. Sensors 2022, 22, 7066. [Google Scholar] [CrossRef]
- Sands, T. Flattening the curve of flexible space robotics. Appl. Sci. 2022, 12, 2992. [Google Scholar] [CrossRef]
- Manikandan, S.; Kaliyaperumal, G.; Hakak, S.; Gadekallu, T.R. Curve-Aware Model Predictive Control (C-MPC) Trajectory Tracking for Automated Guided Vehicle (AGV) over On-Road, In-Door, and Agricultural-Land. Sustainability 2022, 14, 12021. [Google Scholar] [CrossRef]
- Islam, F.; Nabi, M.M.; Ball, J.E. Off-road detection analysis for autonomous ground vehicles: A review. Sensors 2022, 22, 8463. [Google Scholar] [CrossRef] [PubMed]
- Pires, M.; Couto, P.; Santos, A.; Filipe, V. Obstacle detection for autonomous guided vehicles through point cloud clustering using depth data. Machines 2022, 10, 332. [Google Scholar] [CrossRef]
- Zahid, M.N.O.; Hao, L.J. A Study on Obstacle Detection for IoT Based Automated Guided Vehicle (AGV). MEKATRONIKA 2022, 4, 30–41. [Google Scholar] [CrossRef]
- Islam, M.J.; Hong, J.; Sattar, J. Person-following by autonomous robots: A categorical overview. Int. J. Robot. Res. 2019, 38, 1581–1618. [Google Scholar] [CrossRef]
- Honig, S.S.; Oron-Gilad, T.; Zaichyk, H.; Sarne-Fleischmann, V.; Olatunji, S.; Edan, Y. Toward socially aware person-following robots. IEEE Trans. Cogn. Dev. Syst. 2018, 10, 936–954. [Google Scholar] [CrossRef]
- Boschi, A.; Salvetti, F.; Mazzia, V.; Chiaberge, M. A cost-effective person-following system for assistive unmanned vehicles with deep learning at the edge. Machines 2020, 8, 49. [Google Scholar] [CrossRef]
- Tari, J.; Danès, P. Person Following from a Nonholonomic Mobile Robot with Ultimately Bounded Tracking Error. IFAC-PapersOnLine 2020, 53, 9596–9601. [Google Scholar] [CrossRef]
- Qiao, Y.; Fu, Y.; Yuan, M. Communication-Control Co-Design in Wireless Networks: A Cloud Control AGV Example. IEEE Internet Things J. 2022, 10, 2346–2359. [Google Scholar] [CrossRef]
- Tarmizi, A.I.; Shukor, A.Z.; Sobran NM, M.; Jamaluddin, M.H. Latest trend in person following robot control algorithm: A review. J. Telecommun. Electron. Comput. Eng. (JTEC) 2017, 9, 169–174. [Google Scholar]
- Moshayedi, A.J.; Li, J.; Sina, N.; Chen, X.; Liao, L.; Gheisari, M.; Xie, X. Simulation and validation of optimized PID controller in AGV (automated guided vehicles) model using PSO and BAS algorithms. Comput. Intell. Neurosci. 2022, 2022, 7799654. [Google Scholar] [CrossRef]
- Reis, W.P.N.D.; Couto, G.E.; Junior, O.M. Automated guided vehicles position control: A systematic literature review. J. Intell. Manuf. 2022, 34, 1483–1545. [Google Scholar] [CrossRef]
- Montesdeoca, J.; Toibero, J.M.; Jordan, J.; Zell, A.; Carelli, R. Person-Following Controller with Socially Acceptable Robot Motion. Robot. Auton. Syst. 2022, 153, 104075. [Google Scholar] [CrossRef]
- Pucci, D.; Marchetti, L.; Morin, P. Nonlinear Control of Unicycle-Like Robots for Person Following. In Proceedings of the 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems, Tokyo, Japan, 3–7 November 2013; pp. 3406–3411. [Google Scholar] [CrossRef]
- Leigh, A.; Pineau, J.; Olmedo, N.; Zhang, H. Person Tracking and Following with 2d Laser Scanners. In Proceedings of the 2015 IEEE International Conference on Robotics and Automation (ICRA), Seattle, WA, USA, 26–30 May 2015; IEEE: Piscataway, NJ, USA, 2015; pp. 726–733. [Google Scholar]
- Petrov, P.; Georgieva, V.; Kralov, I.; Nikolov, S. An Adaptive Mobile Robot Control for Autonomous Following in Front of a Person. In Proceedings of the 2021 12th National Conference with International Participation (ELECTRONICA), Sofia, Bulgaria, 27–28 May 2021; IEEE: Piscataway, NJ, USA, 2021; pp. 1–4. [Google Scholar]
- Oh-Hara, S.; Saito, K.; Fujimori, A. Person following control for a mobile robot based on color invariance corresponding to varying illumination. IAES Int. J. Robot. Autom. 2022, 11, 33. [Google Scholar] [CrossRef]
- Tarokh, M.; Merloti, P. Vision-based robotic person following under light variations and difficult walking maneuvers. J. Field Robot. 2010, 27, 387–398. [Google Scholar] [CrossRef]
- Shaker, S.; Saade, J.J.; Asmar, D. Fuzzy inference-based person-following robot. Int. J. Syst. Appl. Eng. Dev. 2008, 2, 29–34. [Google Scholar]
- Jia, S.; Wang, L.; Wang, S.; Bai, C. Fuzzy-Based Intelligent Control Strategy for a Person Following Robot. In Proceedings of the 2013 IEEE International Conference on Robotics and Biomimetics (ROBIO), Shenzhen, China, 12–14 December 2013; IEEE: Piscataway, NJ, USA, 2013; pp. 2408–2413. [Google Scholar]
- Wang, L.; Wu, J.; Li, X.; Wu, Z.; Zhu, L. Longitudinal control for person-following robots. J. Intell. Connect. Veh. 2022, 5, 88–98. [Google Scholar] [CrossRef]
- Kautsar, S.; Gumilang, M.A.; Widiawan, B.; Tholabi, H.; Ariscandra, F. Contactless control system design for automatic guide vehicle (agv) based on depth camera. Food Agric. Sci. Polije Proc. Ser. 2021, 3, 136–144. [Google Scholar]
- Sierra-García, J.E.; Santos, M. Mechatronic modelling of industrial AGVs: A complex system architecture. Complexity 2020, 2020, 6687816. [Google Scholar] [CrossRef]
- Sánchez-Martinez, R.; Sierra-García, J.E.; Santos, M. Performance and Extreme Conditions Analysis Based on Iterative Modelling Algorithm for Multi-Trailer AGVs. Mathematics 2022, 10, 4783. [Google Scholar] [CrossRef]






























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Position of the Traction Unit | |
|---|---|
| Position of the body of the AGV | |
| Orientation of the traction unit in the intertial frame | |
| Orientation of the body of the AGV in the intertial frame | |
| Angle of the traction unit in the AGV reference frame | |
| Reference for the angle of the traction unit | |
| Longitudinal velocity of the left wheel | |
| Longitudinal velocity of the right wheel | |
| Longitudinal velocity of the traction unit | |
| Length of the traction unit | |
| Distance between the rear wheels and the traction unit | |
| Gains of the PID | |
| Reference for the longitudinal velocity | |
| Reference for the velocity of the left wheel | |
| Reference for the velocity of the right wheel |
| Safety Clearance | |
|---|---|
| Angle of the field of view | |
| Look-ahead distance | |
| Half of the widht of the AGV | |
| Total number of samples of the LIDAR | |
| Variation of the number of samples in the detection cone with the distance | |
| LIDAR Sample of the closest point | |
| Minimum distance to detect a crossing event | |
| Maximum crossing time, if the crossing takes longer than Tc the tracking phase finishes | |
| Last distance to obstacle before the crossing event | |
| Crossing detection, when it values 1 there is a crossing object |
| Reference for the Acceleration | |
|---|---|
| Reference for the velocity | |
| Reference for the direction | |
| Estimation of the velocity of the tracking target | |
| Look-ahead distance | |
| Distance between the rear wheels to the traction unit |
| Laser Position | Object Position | Estimated Position | Error | |||||
|---|---|---|---|---|---|---|---|---|
| X [m] | Y [m] | Angle [°] | X [m] | Y [m] | X [m] | Y [m] | X [m] | Y [m] |
| −0.5 | −0.5 | 30 | −0.13 | 1.53 | 0.15 | 0.89 | 0.15 | −0.12 |
| −0.5 | −0.5 | 30 | −0.80 | 1.13 | −0.63 | 0.88 | −0.13 | 0.01 |
| −0.5 | −0.5 | 30 | −0.81 | 0.89 | −0.75 | 0.68 | −0.05 | −0.03 |
| −0.5 | −0.5 | 30 | 0.11 | 1.68 | 0.44 | 0.90 | −0.06 | 0.03 |
| −0.5 | −0.5 | 30 | 0.34 | 1.67 | 0.62 | 0.78 | −0.08 | 0.07 |
| −0.5 | −0.5 | 30 | −0.98 | 2.36 | −0.17 | 2.02 | −0.17 | 0.01 |
| −0.5 | −0.5 | 30 | −1.60 | 1.62 | −1.07 | 1.70 | −0.07 | −0.04 |
| −0.5 | −0.5 | 30 | 0.02 | 2.68 | 0.85 | 1.81 | −0.15 | 0.08 |
| −0.5 | −0.5 | 30 | 0.44 | 2.66 | 1.21 | 1.59 | −0.20 | 0.17 |
| Laser Position | Object Position | Estimated Position | Error | |||||
|---|---|---|---|---|---|---|---|---|
| X [m] | Y [m] | Angle [°] | X [m] | Y [m] | X [m] | Y [m] | X [m] | Y [m] |
| 0.5 | 0.5 | −30 | −0.17 | 0.72 | −0.01 | 1.04 | −0.01 | 0.03 |
| 0.5 | 0.5 | −30 | −0.67 | 0.86 | −0.51 | 0.91 | −0.01 | 0.04 |
| 0.5 | 0.5 | −30 | −0.87 | 0.90 | −0.71 | 0.84 | 0.00 | 0.14 |
| 0.5 | 0.5 | −30 | 0.58 | 0.63 | 0.69 | 1.33 | 0.19 | 0.17 |
| 0.5 | 0.5 | −30 | 0.23 | 0.24 | 0.58 | 0.82 | −0.13 | 0.11 |
| 0.5 | 0.5 | −30 | 0.29 | 1.59 | −0.05 | 2.02 | −0.05 | 0.00 |
| 0.5 | 0.5 | −30 | −0.67 | 1.81 | −0.98 | 1.74 | 0.02 | 0.00 |
| Laser Position | Object Position | Estimated Position | Errors | |||||
|---|---|---|---|---|---|---|---|---|
| X [m] | Y [m] | Angle [°] | X [m] | Y [m] | X [m] | Y [m] | X [m] | Y [m] |
| 0 | 0 | 0 | 0.03 | 1.00 | 0.03 | 1.00 | 0.03 | −0.01 |
| 0 | 0 | 0 | −0.42 | 0.90 | −0.42 | 0.90 | 0.08 | −0.04 |
| 0 | 0 | 0 | −0.64 | 0.78 | −0.64 | 0.78 | 0.06 | 0.07 |
| 0 | 0 | 0 | 0.54 | 0.85 | 0.54 | 0.85 | 0.04 | 0.02 |
| 0 | 0 | 0 | 0.68 | 0.76 | 0.68 | 0.76 | −0.03 | 0.05 |
| 0 | 0 | 0 | 0.11 | 2.03 | 0.11 | 2.03 | 0.11 | 0.00 |
| 0 | 0 | 0 | −0.88 | 1.80 | −0.88 | 1.80 | 0.12 | 0.06 |
| 0 | 0 | 0 | −1.39 | 1.07 | −1.39 | 1.43 | 0.02 | 0.01 |
| 0 | 0 | 0 | 1.07 | 1.68 | 1.07 | 1.68 | 0.07 | 0.03 |
| 0 | 0 | 0 | 1.45 | 1.45 | 1.45 | 1.45 | 0.03 | 0.03 |
| Trajectory | Dmin [m] | Dmax [m] | Davg [m] | Dstd [m] |
|---|---|---|---|---|
| Square clockwise | 0.98 | 1.94 | 1.29 | 0.21 |
| Square counterclockwise | 1.05 | 1.86 | 1.46 | 0.21 |
| Circular clockwise | 0.75 | 1.87 | 1.41 | 0.30 |
| Circular counterclockwise | 1.03 | 2.04 | 1.63 | 0.25 |
| Straigth line (0 deg) | 0.80 | 1.58 | 1.16 | 0.21 |
| Straigth line (30 deg) | 1.04 | 2.06 | 1.60 | 0.27 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sierra-García, J.E.; Fernández-Rodríguez, V.; Santos, M.; Quevedo, E. Development and Experimental Validation of Control Algorithm for Person-Following Autonomous Robots. Electronics 2023, 12, 2077. https://doi.org/10.3390/electronics12092077
Sierra-García JE, Fernández-Rodríguez V, Santos M, Quevedo E. Development and Experimental Validation of Control Algorithm for Person-Following Autonomous Robots. Electronics. 2023; 12(9):2077. https://doi.org/10.3390/electronics12092077
Chicago/Turabian StyleSierra-García, J. Enrique, Víctor Fernández-Rodríguez, Matilde Santos, and Eduardo Quevedo. 2023. "Development and Experimental Validation of Control Algorithm for Person-Following Autonomous Robots" Electronics 12, no. 9: 2077. https://doi.org/10.3390/electronics12092077
APA StyleSierra-García, J. E., Fernández-Rodríguez, V., Santos, M., & Quevedo, E. (2023). Development and Experimental Validation of Control Algorithm for Person-Following Autonomous Robots. Electronics, 12(9), 2077. https://doi.org/10.3390/electronics12092077