




A Circularly Polarized Millimeter Wave Radar for Wind Turbine Sensing

 , and
, and
Abstract
:1. Introduction
2. Radar Architecture Design
2.1. Wind Turbine Scene
2.2. Frequency Spectrum Selection
2.3. Link Budget Analysis
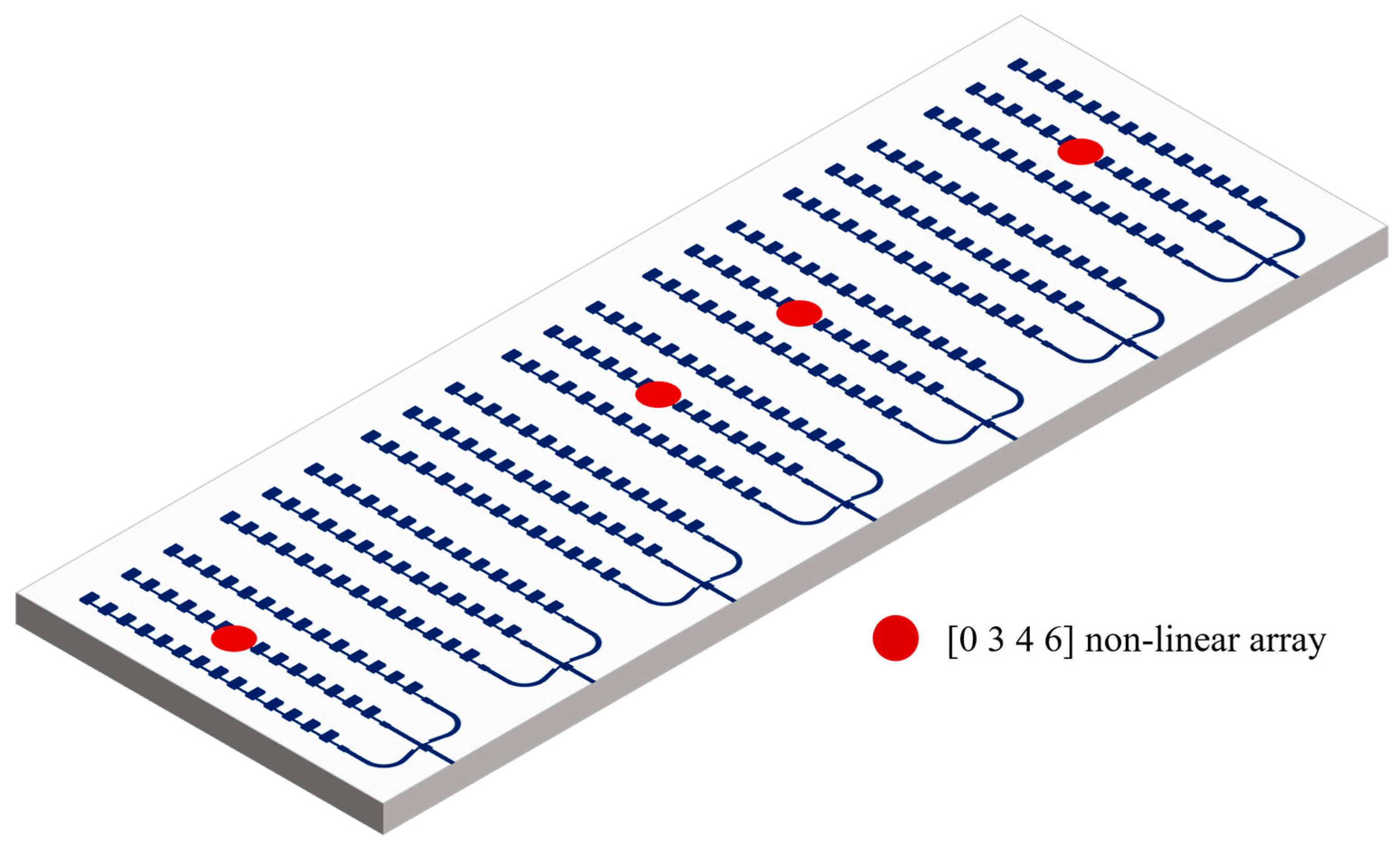
2.4. SIMO Antenna Layout Design
3. Antenna Design and Experimental Test
3.1. Antenna Design and Structure
3.2. The Experimental Test of Proposed Antenna
4. RF Waveform Configuration
5. Radar Experiments
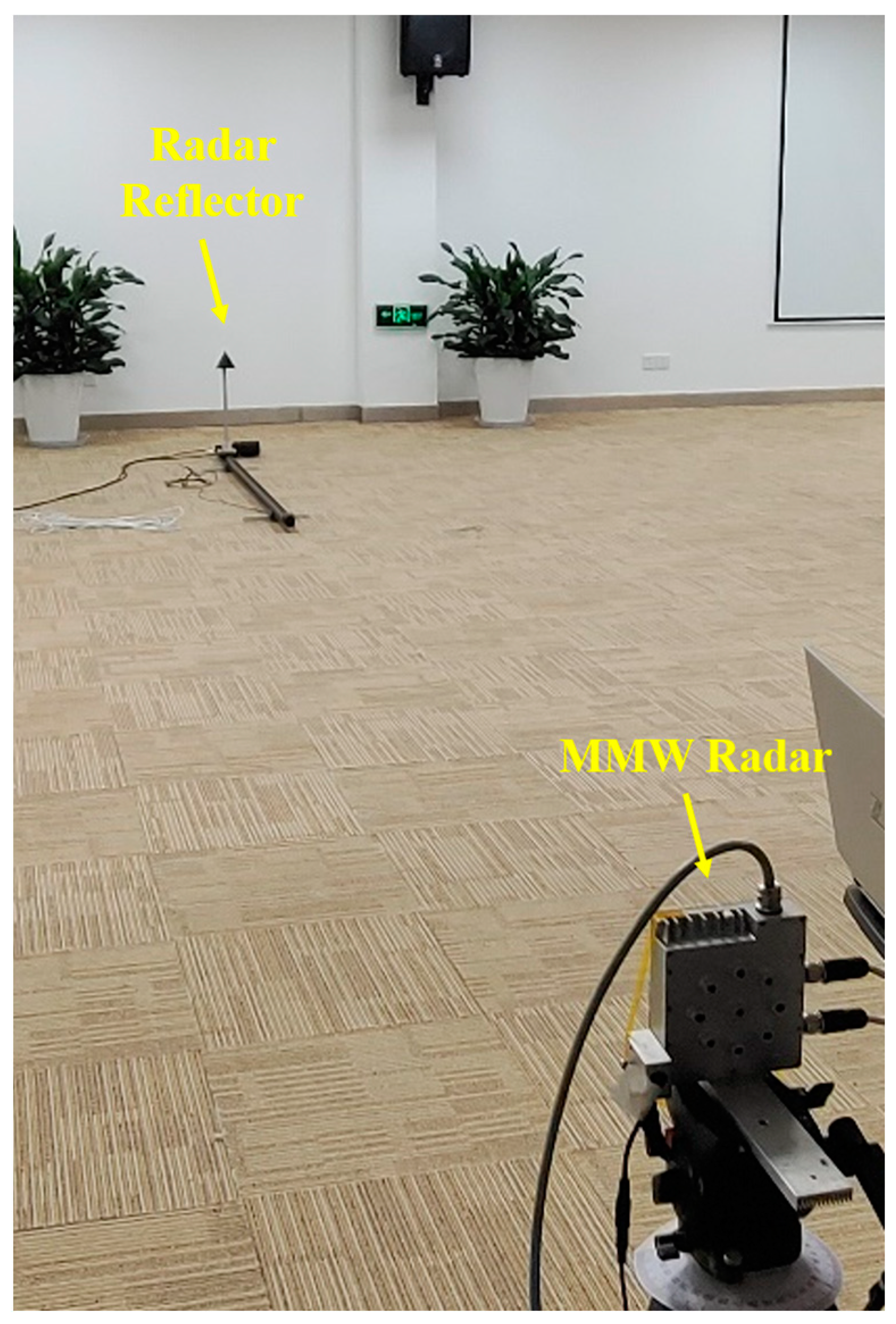
5.1. Radar Performance Test
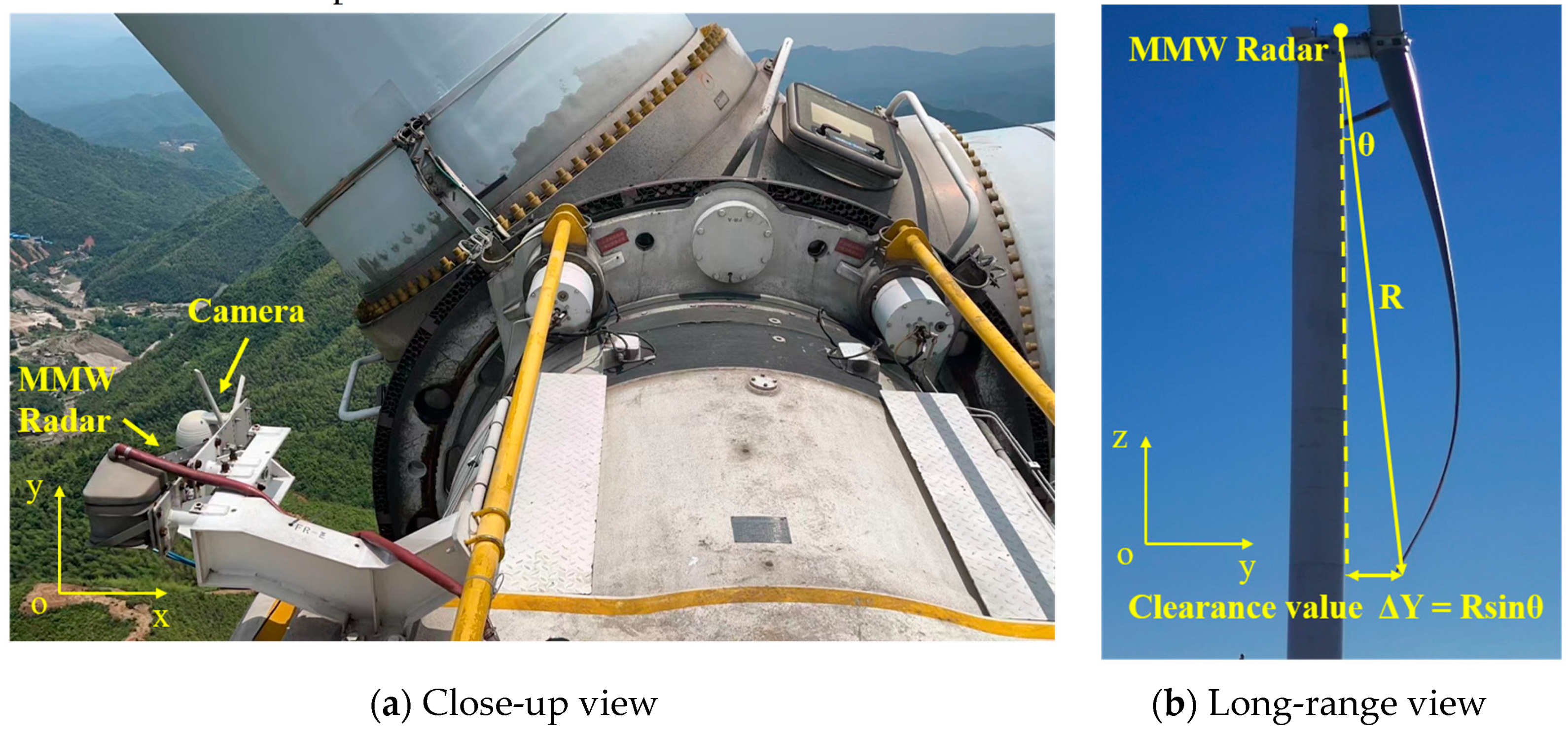
5.2. Radar Experiments on a Practical Wind Turbine
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Lee, J.R.; Kim, H.C. Feasibility of in situ blade deflection monitoring of a wind turbine using a laser displacement sensor within the tower. Smart Mater. Struct. 2012, 22, 027002. [Google Scholar] [CrossRef]
- Guan, B.; Su, Z.; Yu, Q.; Li, Z.; Feng, W.; Yang, D.; Zhang, D. Monitoring the blades of a wind turbine by using videogrammetry. Opt. Lasers Eng. 2022, 152, 106901. [Google Scholar] [CrossRef]
- Zhang, L.; Wei, J. Measurement and control method of clearance between wind turbine tower and blade-tip based on millimeter-wave radar sensor. Mech. Syst. Signal Process. 2021, 149, 107319. [Google Scholar] [CrossRef]
- Banerjee, U.; Karmakar, A.; Saha, A. A review on circularly polarized antennas, trends, and advances. Int. J. Microw. Wirel. Technol. 2020, 12, 922–943. [Google Scholar] [CrossRef]
- Schneider, D.A.; Rosch, M.; Tessmann, A.; Zwick, T. A LowLoss W-Band Frequency-Scanning Antenna for Wideband Multichannel Radar Applications. IEEE Antennas Wirel. Propag. Lett. 2019, 18, 806–810. [Google Scholar] [CrossRef]
- Asaadi, M.; Sebak, A. High-Gain Low-Profile Circularly Polarized Slotted SIW Cavity Antenna for MMW Applications. IEEE Antennas Wirel. Propag. Lett. 2017, 16, 752–755. [Google Scholar]
- McFee, R.; Maher, T. Effect of surface reflections on rain cancellation of circularly polarized radars. IRE Trans. Antennas Propag. 1959, 7, 199–201. [Google Scholar] [CrossRef]
- Semplak, R.A. Simultaneous measurements of depolarization by rain using linear and circular polarizations at 18 Ghz. Bell Syst. Tech. J. 1974, 53, 400–404. [Google Scholar] [CrossRef]
- Zhu, Q.; Ng, K.B.; Chan, C.H. Printed circularly polarized spiral antenna array for miilimeter wave applications. IEEE Trans. Antennas Propag. 2017, 65, 636–642. [Google Scholar] [CrossRef]
- Zhang, J.; Huang, Y.; Li, Z. Analysis of polarization matching and transmitting/receiving pattern reciprocity of antenna. In Proceedings of the 2014 3rd Asia-Pacific Conference on Antennas and Propagation, Harbin, China, 26–29 July 2014; pp. 248–251. [Google Scholar]
- Gyasi, K.O.; Wen, G.; Inserra, D.; Huang, Y.; Li, J.; Ampoma, A.E. A compact broadband cross-shaped circularly polarized planar monopole antenna with a ground plane extension. IEEE Antennas Wirel. Propag. Lett. 2018, 17, 335–338. [Google Scholar] [CrossRef]
- Tong, C.; Kremer, H.I.; Yang, N.; Leung, K.W. Compact wideband ircularly polarized dielectric resonator antenna with dielectric vias. IEEE Antennas Wirel. Propag. Lett. 2022, 21, 1100–1104. [Google Scholar] [CrossRef]
- Xu, Y.; Zhu, L.; Liu, N. Design approach for a dual-band circularly polarized slot antenna with flexible frequency ratio and similar in-band gain. IEEE Antennas Wirel. Propag. Lett. 2022, 21, 1037–1041. [Google Scholar] [CrossRef]
- Wu, J.; Yang, W.; Gu, L.; Xue, Q.; Che, W. Low-profile widebanddual-circularly polarized metasurface antenna based on traveling-wave sequential feeding mechanism. IEEE Antennas Wirel. Propag. Lett. 2022, 21, 1085–1089. [Google Scholar] [CrossRef]
- Dey, K.C.; Mishra, A.; Chowdhury, M. Potential of intelligent transportation systems in mitigating adverse weather impacts on road mobility: A review. IEEE Trans. Intell. Transp. Syst. 2015, 16, 1107–1119. [Google Scholar] [CrossRef]
- Skolnik, M.I. Introduction to Radar Systems, 2nd ed.; McGraw-Hill, Inc.: New York, NY, USA, 1981. [Google Scholar]
- Chen, C.C. Attenuation of Electromagnetic Radiation by Haze, Fog, Clouds, and Rain; The Rand Corporation: Santa Monica, CA, USA, 1975. [Google Scholar]
- Texas Instrument xWR2243 Evaluation Module (xWR2243BOOST). Available online: https://www.ti.com/tool/AWR2243BOOST (accessed on 7 December 2023).
- Levanon, N. Radar Principles, 1st ed.; John Wiley and Sons: New York, NY, USA, 1988. [Google Scholar]
- Wong, K.L.; Ke, S.Y. Cylindrical-rectangular Microstrip Patch Antenna for Circular Polarization. IEEE Trans. Antennas Propag. 1993, 41, 246–249. [Google Scholar] [CrossRef]
- The Fundamentals of MMW Radar Sensors. Available online: https://www.ti.com/lit/wp/spyy005a/spyy005a.pdf (accessed on 7 December 2023).



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| ID | Index Name | Value |
|---|---|---|
| 1 | Maximum detection range Rmax | 150 m |
| 2 | Range resolution ΔR | 0.15 m |
| 3 | Maximum speed range Vmax | ±4 m/s |
| 4 | Velocity resolution ΔR | 0.0625 m/s |
| 5 | Field Angle range θmax | ±15° |
| 6 | Angular resolution Δθ | 3° |
| ID | Index Name | K-Band Radar | W-Band Radar |
|---|---|---|---|
| 1 | Frequency range | 24~24.25 GHz | 76~81 GHz |
| 2 | Bandwidth | 250 MHz | 5 GHz |
| 3 | Range resolution | Minimum 60 cm | Minimum 3.75 cm |
| 4 | Velocity resolution | Low | Three times the former |
| 5 | Antenna size | Large | A third of the former |
| ID | Index Name | Value |
|---|---|---|
| 1 | Numbers of ADC samples N | 1024 |
| 2 | Numbers of Doppler samples M | 128 |
| 3 | Chirp slope k | 10 MHz/μs |
| 4 | Frequency modulation bandwidth B | 1.024 GHz |
| 5 | Chirp period | 240 μs |
| 6 | Frame period | 35 ms |
| Manual Measurement | Radar Measurement | |
|---|---|---|
| Minimum rotor speed (6 RPM) | 12 m | 11.534 m |
| Maximum rotor speed (12 RPM) | 5.5 m | 5.85 m |
| ID | Method | Detection Range | Weather |
|---|---|---|---|
| [1] | one laser | 5 to 20 m (middle of the tower to the blade tip) | N/A |
| [2] | one camera | 30 to 40 m (ground to the blade tip) | N/A |
| [3] | eight 24 GHz mmWave radar | 5 to 20 m (middle of the tower to the blade tip) | N/A |
| This work | one 79 GHz mmWave radar | 70 to 80 m (top of the tower to the blade tip) | sunny, cloudy, overcast, light rain, thunderstorm |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, J.; Guo, B.; Jin, Y.; Bao, Z.; Wang, L.; Wang, S.; Yang, G.; Wang, R.; Luo, Y. A Circularly Polarized Millimeter Wave Radar for Wind Turbine Sensing. Electronics 2024, 13, 462. https://doi.org/10.3390/electronics13020462
Chen J, Guo B, Jin Y, Bao Z, Wang L, Wang S, Yang G, Wang R, Luo Y. A Circularly Polarized Millimeter Wave Radar for Wind Turbine Sensing. Electronics. 2024; 13(2):462. https://doi.org/10.3390/electronics13020462
Chicago/Turabian StyleChen, Jiayi, Bin Guo, Yitong Jin, Zhijian Bao, Lijun Wang, Siye Wang, Guangli Yang, Rui Wang, and Yong Luo. 2024. "A Circularly Polarized Millimeter Wave Radar for Wind Turbine Sensing" Electronics 13, no. 2: 462. https://doi.org/10.3390/electronics13020462
APA StyleChen, J., Guo, B., Jin, Y., Bao, Z., Wang, L., Wang, S., Yang, G., Wang, R., & Luo, Y. (2024). A Circularly Polarized Millimeter Wave Radar for Wind Turbine Sensing. Electronics, 13(2), 462. https://doi.org/10.3390/electronics13020462