




Fusion of Coherent and Non-Coherent Pol-SAR Features for Land Cover Classification


Abstract
:1. Introduction
2. Coherent and Incoherent Decompositions for Feature Extraction
2.1. Coherent Decomposition
2.2. Non-Coherent Decomposition
3. Pauli Coherent Decomposition and Freeman–Durden Non-Coherent Approach
3.1. Pauli Decomposition
- The single or odd bounce scattering mechanism, denoted as , corresponds to plate, sphere, or trihedral scattering;
- The diplane scattering mechanism, represented by , corresponds to dihedral scattering;
- For a relative orientation of 0°, it denotes even bounce scattering, while for 45°, it corresponds to ;
- The antisymmetric mechanisms are depicted through .
3.2. Freeman–Durden Decomposition
- Canopy scatter, which arises from a cloud of randomly oriented dipoles or volume;
- Even- or double-bounce scatter, originating from a pair of orthogonal surfaces with differing dielectric constants;
- Bragg scatter, emanating from a moderately rough surface.
3.3. Cameron’s Angle of Symmetry
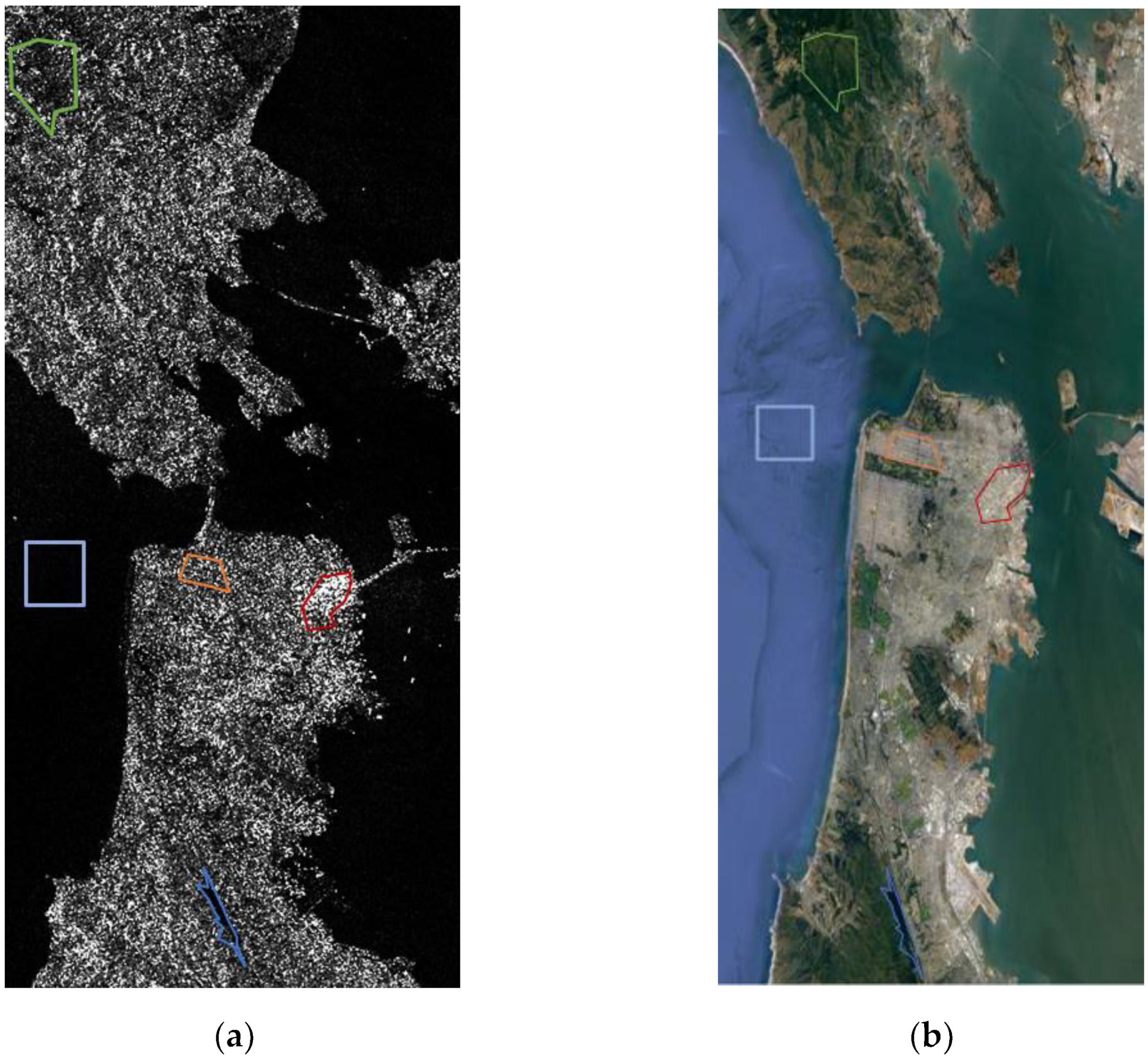
4. Dataset
5. Fusing Coherent and Non-Coherent SAR Features
5.1. Fusion Approaches for Comprehensive Information Integration
5.2. Feature Fusion Utilizing FLD
5.3. Dimensionality Reduction–Direction of Fused Features
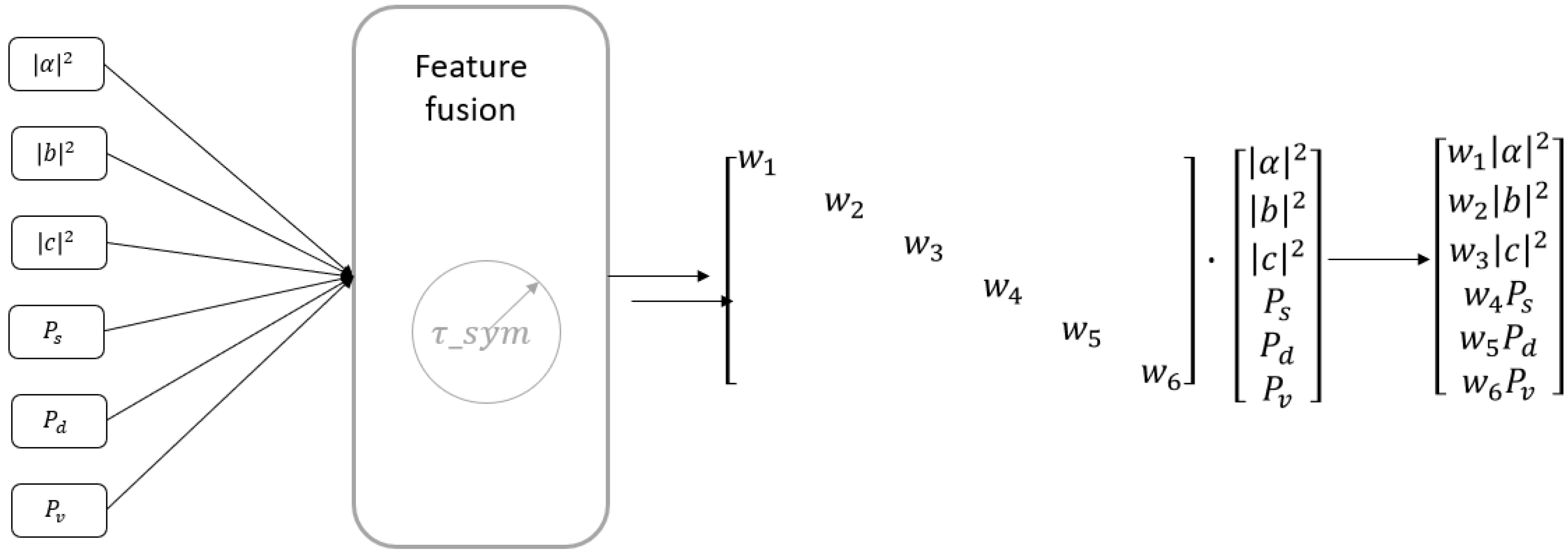
5.4. Feature Fusion Using the Angle of Symmetry
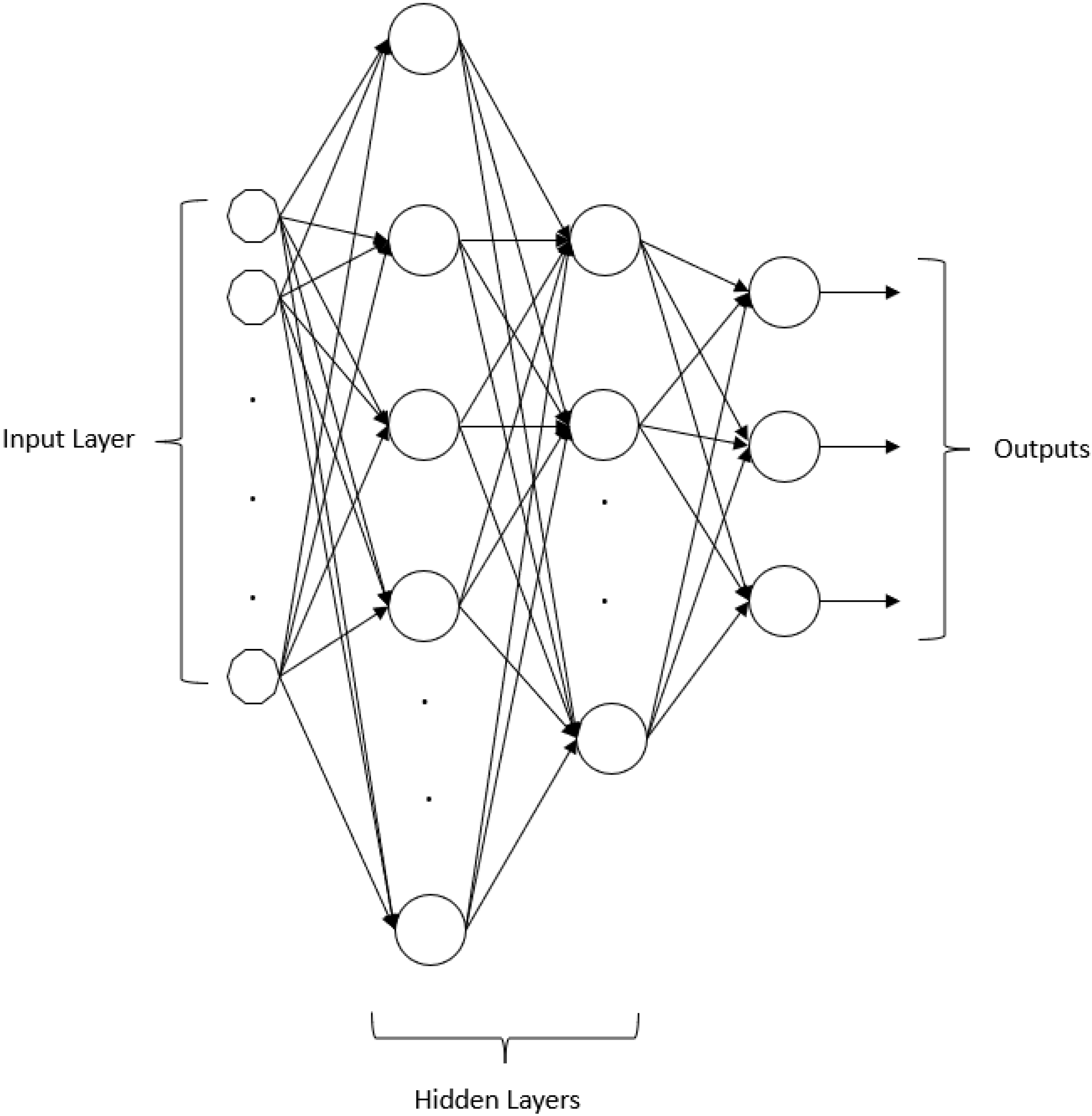
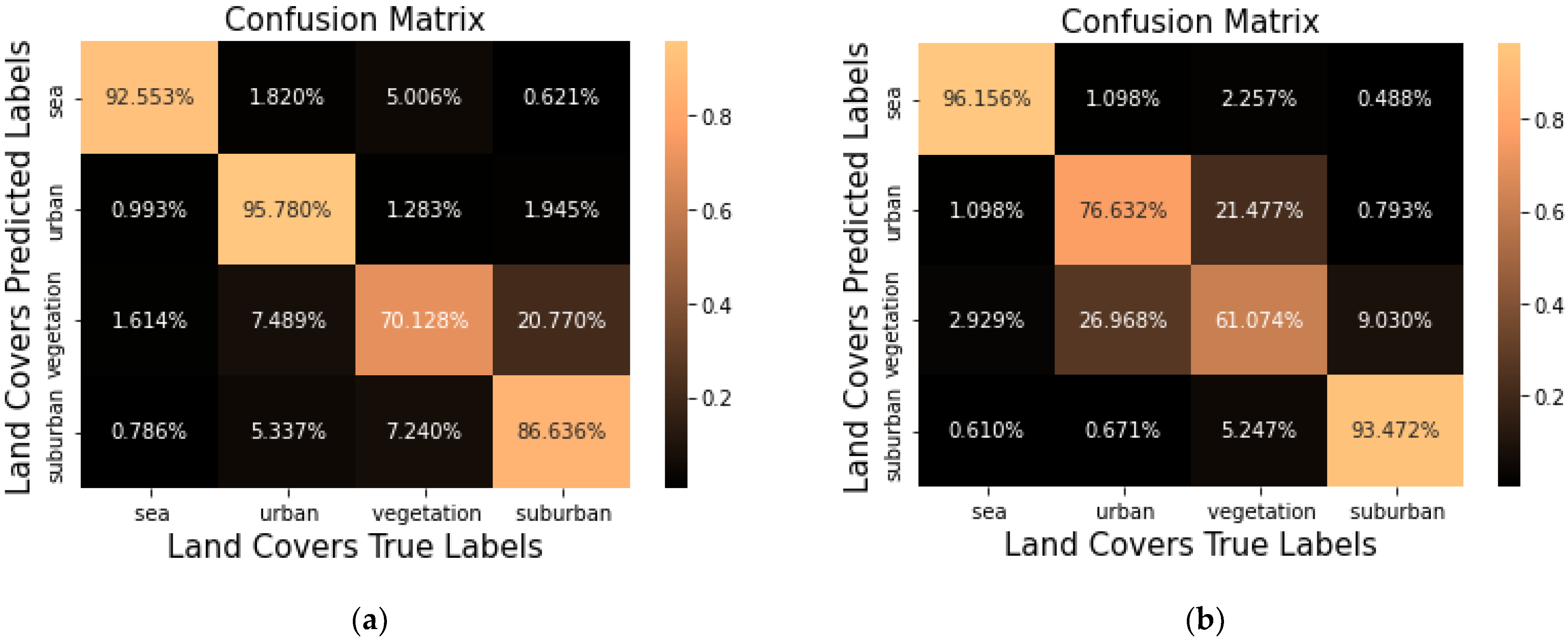
6. Evaluation of the Fused Features in a Land Cover Classification Procedure Based on a Simple Neural Network
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Simone, G.; Farina, A.; Morabito, F.C.; Serpico, S.B.; Bruzzone, L. Image fusion techniques for remote sensing applications. Inf. Fusion 2002, 3, 3–15. [Google Scholar] [CrossRef]
- Gómez-Chova, L.; Tuia, D.; Moser, G.; Camps-Valls, G. Multimodal Classification of Remote Sensing Images: A Review and Future Directions. Proc. IEEE 2015, 103, 1560–1584. [Google Scholar] [CrossRef]
- Alparone, L.; Bruno Aiazzi, B.; Baronti, S.; Garzelli, A. Remote Sensing Image Fusion, 1st ed.; Routledge Taylor & Francis Group: London, UK, 2015. [Google Scholar]
- Ni, J.; Zhang, F.; Yin, Q.; Li, H.C. Robust weighting nearest regularized subspace classifier for PolSAR imagery. IEEE Signal Process. Lett. 2019, 26, 1496–1500. [Google Scholar] [CrossRef]
- Han, F.; Zhang, L.; Dong, H. Trusted Polarimetric Feature Fusion for Polsar Image Classification. In Proceedings of the 2023 SAR in Big Data Era (BIGSARDATA), Beijing, China, 20–22 September 2023; pp. 1–4. [Google Scholar] [CrossRef]
- Ai, J.; Wang, F.; Mao, Y.; Luo, Q.; Yao, B.; Yan, H.; Xing, M.; Wu, Y. A Fine PolSAR Terrain Classification Algorithm Using the Texture Feature Fusion-Based Improved Convolutional Autoencoder. IEEE Trans. Geosci. Remote Sens. 2022, 60, 5218714. [Google Scholar] [CrossRef]
- Wang, Y.; Cheng, J.; Zhou, Y.; Zhang, F.; Yin, Q. A Multichannel Fusion Convolutional Neural Network Based on Scattering Mechanism for PolSAR Image Classification. IEEE Geosci. Remote Sens. Lett. 2022, 19, 4007805. [Google Scholar] [CrossRef]
- Imani, M. Scattering and contextual features fusion using a complex multi-scale decomposition for polarimetric SAR image classification. Geocarto Int. 2022, 37, 17216–17241. [Google Scholar] [CrossRef]
- Imani, M. Scattering and Regional Features Fusion Using Collaborative Representation for PolSAR Image Classification. In Proceedings of the 2022 9th Iranian Joint Congress on Fuzzy and Intelligent Systems (CFIS), Bam, Iran, 2–4 March 2022; pp. 1–6. [Google Scholar] [CrossRef]
- Sebt, M.A.; Darvishnezhad, M. Feature fusion method based on local binary graph for PolSAR image classification. IET Radar Sonar Navig. 2023, 17, 939954. [Google Scholar] [CrossRef]
- Lin, L.; Li, J.; Shen, H.; Zhao, L.; Yuan, Q.; Li, X. Low-Resolution Fully Polarimetric SAR and High-Resolution Single-Polarization SAR Image Fusion Network. IEEE Trans. Geosci. Remote Sens. 2022, 60, 5216117. [Google Scholar] [CrossRef]
- Wang, J.; Chen, J.; Wang, Q. Fusion of POLSAR and Multispectral Satellite Images: A New Insight for Image Fusion. In Proceedings of the 2020 IEEE International Conference on Computational Electromagnetics (ICCEM), Singapore, 24–26 August 2020; pp. 83–84. [Google Scholar] [CrossRef]
- West, R.D.; Yocky, D.A.; Redman, B.J.; Van Der Laan, J.D.; Anderson, D.Z. Optical and Polarimetric SAR Data Fusion Terrain Classification Using Probabilistic Feature Fusion. In Proceedings of the 2020 IEEE International Geoscience and Remote Sensing Symposium, Waikoloa, HI, USA, 26 September–2 October 2020; pp. 2097–2100. [Google Scholar] [CrossRef]
- Touzi, R.; Boerner, W.M.; Lee, J.S.; Lueneburg, E. A review of polarimetry in the context of synthetic aperture radar: Concepts and information extraction. Can. J. Remote Sens. 2004, 30, 380–407. [Google Scholar] [CrossRef]
- Lee, J.S.; Pottier, E. Polarimetric Radar Imaging, 1st ed.; CRC Press: New York, NY, USA, 2009. [Google Scholar]
- López-Martínez, C.; Pottier, E. Basic Principles of SAR Polarimetry. In Polarimetric Synthetic Aperture Radar, 1st ed.; Hajnsek, I., Desnos, Y.L., Eds.; Springer: Cham, Switzerland, 2021; Volume 25, pp. 1–58. [Google Scholar] [CrossRef]
- Krogager, E. New decomposition of the radar target scattering matrix. Electron. Lett. 1990, 26, 1525–1527. [Google Scholar] [CrossRef]
- Cameron, W.L.; Leung, L.K. Feature Motivated Polarization Scattering Matrix Decomposition. In Proceedings of the IEEE International Conference on Radar, Arlington, VA, USA, 7–10 May 1990. [Google Scholar]
- Cameron, W.L.; Youssef, N.N.; Leung, L.K. Simulated Polarimetric Signatures of Primitive Geometrical Shapes. IEEE Trans. Geosci. Remote Sens. 1996, 34, 793–803. [Google Scholar] [CrossRef]
- Cameron, W.L.; Rais, H. Conservative Polarimetric Scatterers and Their Role in Incorrect Extensions of the Cameron Decomposition. IEEE Trans. Geosci. Remote Sens. 2006, 44, 3506–3516. [Google Scholar] [CrossRef]
- Huynen, J.R. Phenomenological Theory of Radar Targets. Ph.D. Thesis, TU Delft Repository, Delft, The Netherlands, 1970. [Google Scholar]
- Freeman, A.; Durden, S.L. A three-component scattering model for polarimetric SAR data. IEEE Trans. Geosci. Remote Sens. 1998, 36, 963–973. [Google Scholar] [CrossRef]
- Yamaguchi, Y.; Moriyama, T.; Ishido, M.; Yamada, H. Four-component scattering model for polarimetric SAR image decomposition. IEEE Trans. Geosci. Remote Sens. 2005, 43, 1699–1706. [Google Scholar] [CrossRef]
- Van Zyl, J.J.; Arii, M.; Kim, Y. Model-based decomposition of polarimetric SAR covariance matrices constrained for nonnegative eigenvalues. IEEE Trans. Geosci. Remote Sens. 2011, 49, 3452–3459. [Google Scholar] [CrossRef]
- Eltoft, T.; Doulgeris, A.P. Model-Based Polarimetric Decomposition with Higher Order Statistics. IEEE Trans. Geosci. Remote Sens. Lett. 2019, 16, 992–996. [Google Scholar] [CrossRef]
- Wang, X.; Zhang, L.; Zou, B. A new Six-Component Decomposition based on New Volume Scattering Models for PolSAR Image. In Proceedings of the 2021 CIE International Conference on Radar (Radar), Haikou, China, 15–19 December 2021; pp. 631–634. [Google Scholar] [CrossRef]
- Singh, G.; Malik, R.; Mohanty, S.; Rathore, V.S.; Yamada, K.; Umemura, M.; Yamaguchi, Y. Seven-Component Scattering Power Decomposition of POLSAR Coherency Matrix. IEEE Trans. Geosci. Remote Sens. 2019, 57, 8371–8382. [Google Scholar] [CrossRef]
- Cloude, S.R.; Pottier, E. An entropy based classification scheme for land applications of polarimetric SAR. IEEE Trans. Geosci. Remote Sens. 1997, 35, 68–78. [Google Scholar] [CrossRef]
- Gui, R.; Xu, X.; Wang, L.; Yang, R.; Pu, F. Eigenvalue Statistical Components-Based PU-Learning for PolSAR Built-Up Areas Extraction and Cross-Domain Analysis. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2020, 13, 3192–3203. [Google Scholar] [CrossRef]
- Addabbo, P.; Biondi, F.; Clemente, C.; Orlando, D.; Pallotta, L. Classification of covariance matrix eigenvalues in polarimetric SAR for environmental monitoring applications. IEEE Aerosp. Electron. Syst. Mag. 2019, 34, 28–43. [Google Scholar] [CrossRef]
- Karachristos, K.; Koukiou, G.; Anastassopoulos, V. PolSAR Cell Information Representation by a Pair of Elementary Scatterers. Remote Sens. 2022, 14, 695. [Google Scholar] [CrossRef]
- Ballester-Berman, J.D.; Lopez-Sanchez, J.M. Application of Freeman-Durden Decomposition to Polarimetric SAR Interferometry. In Proceedings of the 8th European Conference on Synthetic Aperture Radar, Aachen, Germany, 7–10 June 2010; pp. 1–4. [Google Scholar]
- Haldar, D.; Dave, R.; Dave, V.A. Evaluation of full-polarimetric parameters for vegetation monitoring in rabi (winter) season. Egypt. J. Remote Sens. Space Sci. 2018, 21 (Suppl. S1), S67–S73. [Google Scholar] [CrossRef]
- He, Z.; Li, S.; Lin, S.; Dai, l. Monitoring Rice Phenology Based on Freeman-Durden Decomposition of Multi-Temporal Radarsat-2 Data. In Proceedings of the IGARSS 2018-IEEE International Geoscience and Remote Sensing Symposium, Valencia, Spain, 22–27 July 2018; pp. 7691–7694. [Google Scholar] [CrossRef]
- Feng, X.; Liang, W.; Liu, C.; Nilot, E.; Zhang, M.; Liang, S. Application of freeman decomposition to full polarimetric GPR. In Proceedings of the 2013 IEEE International Geoscience and Remote Sensing Symposium—IGARSS, Melbourne, VIC, Australia, 21–26 July 2013; pp. 3534–3537. [Google Scholar] [CrossRef]
- Xu, X.O.; Marino, A.; Li, L. Biomass related parameter retrieving from quad-pol images based on Freeman-Durden decomposition. In Proceedings of the 2011 IEEE International Geoscience and Remote Sensing Symposium, Vancouver, BC, Canada, 24–29 July 2011; pp. 405–408. [Google Scholar] [CrossRef]
- Available online: https://www.esa.int (accessed on 12 October 2023).
- Duda, R.; Hart, P.; Stork, D. Pattern Classification, 2nd ed.; Wiley & Sons: New York, NY, USA, 2001. [Google Scholar]
- Kanellopoulos, I.; Wilkinson, G.G. Strategies and best practice for neural network image classification. Int. J. Remote Sens. 1997, 18, 711–725. [Google Scholar] [CrossRef]
- Foody, G.M.; McCulloch, M.B.; Yates, W.B. The effect of training set size and composition on artificial neural network classification. Int. J. Remote Sens. 1995, 16, 1707–1723. [Google Scholar] [CrossRef]
- Rumelhart, D.E.; Hinton, G.E.; Williams, R.J. Parallel Distributed Processing; MIT Press: Cambridge, MA, USA, 1986. [Google Scholar]
- Kingma, D.P.; Lei Ba, J. Adam: A Method for Stochastic Optimization. arXiv 2015, arXiv:1412.6980. [Google Scholar] [CrossRef]
- Principe, J.C.; Euliano, N.R.; Lefebvre, W.C. Neural and Adaptive Systems: Fundamentals through Simulations; John Wiley & Sons, Inc.: New York, NY, USA, 1999; pp. 100–222. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | |
| 1 | 1 | 0.1057 | 0.4238 | −0.0106 | 0.3731 | −0.0356 | 0.0046 |
| 2 | 0.1057 | 1 | 0.2240 | 0.0014 | 0.1885 | −0.0016 | −0.0201 |
| 3 | 0.4238 | 0.2240 | 1 | −0.0469 | 0.3997 | −0.0344 | −0.2007 |
| 4 | −0.0106 | 0.0014 | −0.0469 | 1 | −0.2292 | 0.4123 | 0.0353 |
| 5 | 0.3731 | 0.1885 | 0.3997 | −0.2292 | 1 | −0.1921 | −0.1015 |
| 6 | −0.0356 | −0.0016 | −0.0344 | 0.4123 | −0.1921 | 1 | −0.0044 |
| 7 | 0.0046 | −0.0201 | −0.2007 | 0.0353 | −0.1015 | −0.0044 | 1 |
| λ: | 0.0138 | 0.019 | 0.0287 | 0.0295 | 0.0397 | 0.0487 | 0.1163 |
| 0.117 | 0.137 | 0.169 | 0.171 | 0.199 | 0.220 | 0.341 |
| Eigenvalues | |||||||
| suburban | 0.0225 | 0.0351 | 0.0393 | 0.0482 | 0.0534 | 0.0746 | 0.1667 |
| lake | 0.0069 | 0.0415 | 0.0481 | 0.0567 | 0.0591 | 0.0818 | 0.0996 |
| sea | 0.0059 | 0.0369 | 0.0478 | 0.0540 | 0.0642 | 0.0847 | 0.1103 |
| vegetation | 0.0121 | 0.0257 | 0.0309 | 0.0401 | 0.0438 | 0.0530 | 0.0613 |
| λ: | 2287 | 465 | 84 | 74 |
| 49 | 21.5 | 9.1 | 8.6 |
| Feature Fusion Based on FLD | |||||
|---|---|---|---|---|---|
| Folds | 1 | 2 | 3 | 4 | 5 |
| Accuracy/Fold | 0.867 | 0.868 | 0.854 | 0.861 | 0.860 |
| Average Accuracy | 0.862 | ||||
| Folds | 1 | 2 | 3 | 4 | 5 |
| Accuracy/Fold | 0.830 | 0.814 | 0.816 | 0.802 | 0.811 |
| Average Accuracy | 0.815 | ||||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Karachristos, K.; Koukiou, G.; Anastassopoulos, V. Fusion of Coherent and Non-Coherent Pol-SAR Features for Land Cover Classification. Electronics 2024, 13, 634. https://doi.org/10.3390/electronics13030634
Karachristos K, Koukiou G, Anastassopoulos V. Fusion of Coherent and Non-Coherent Pol-SAR Features for Land Cover Classification. Electronics. 2024; 13(3):634. https://doi.org/10.3390/electronics13030634
Chicago/Turabian StyleKarachristos, Konstantinos, Georgia Koukiou, and Vassilis Anastassopoulos. 2024. "Fusion of Coherent and Non-Coherent Pol-SAR Features for Land Cover Classification" Electronics 13, no. 3: 634. https://doi.org/10.3390/electronics13030634
APA StyleKarachristos, K., Koukiou, G., & Anastassopoulos, V. (2024). Fusion of Coherent and Non-Coherent Pol-SAR Features for Land Cover Classification. Electronics, 13(3), 634. https://doi.org/10.3390/electronics13030634