
Novel Structure of Shield Ring to Reduce Shaft Voltage and Improve Cooling Performance of Interior Permanent Magnet Synchronous Motor



Abstract
:1. Introduction
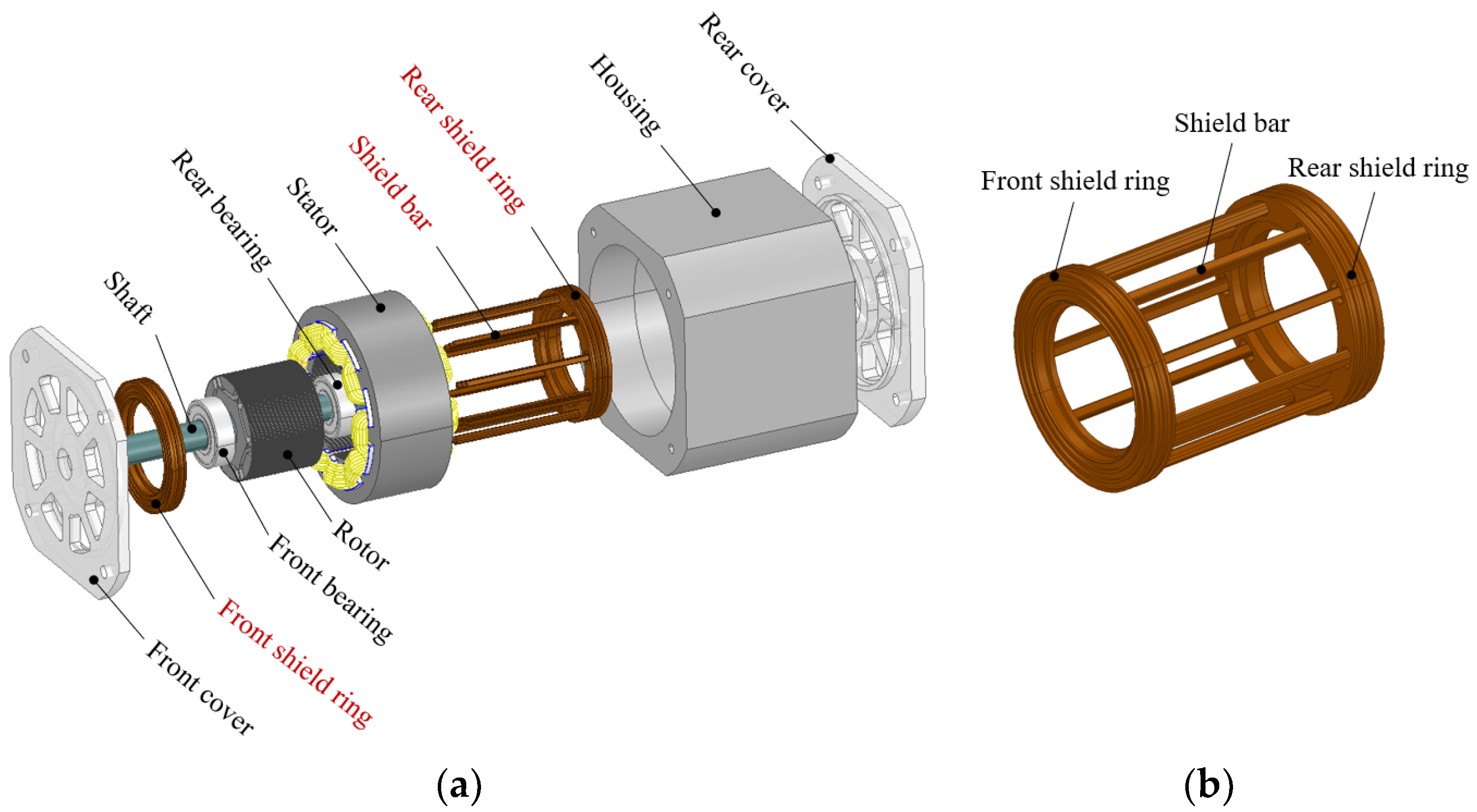
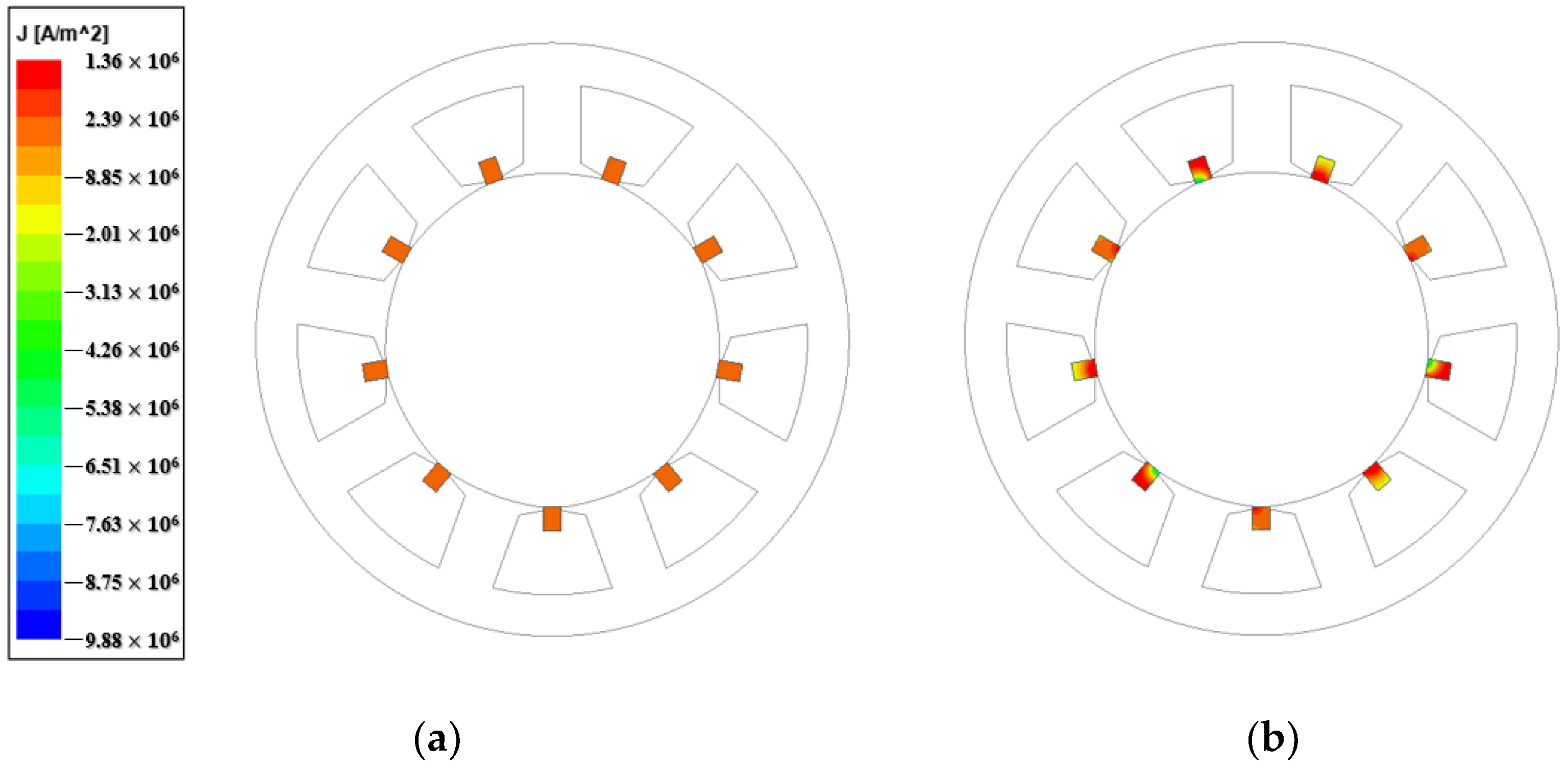
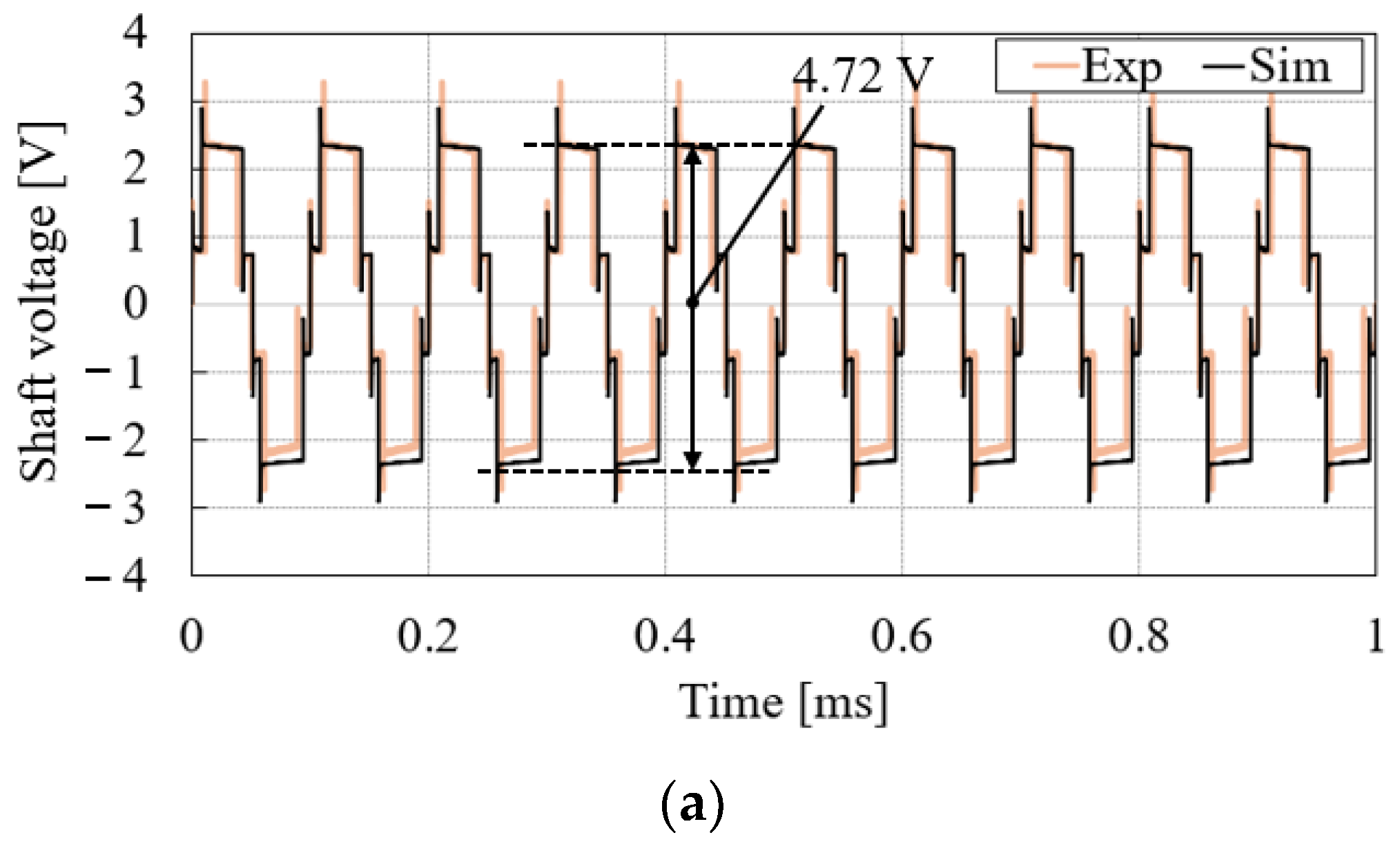
- (a)
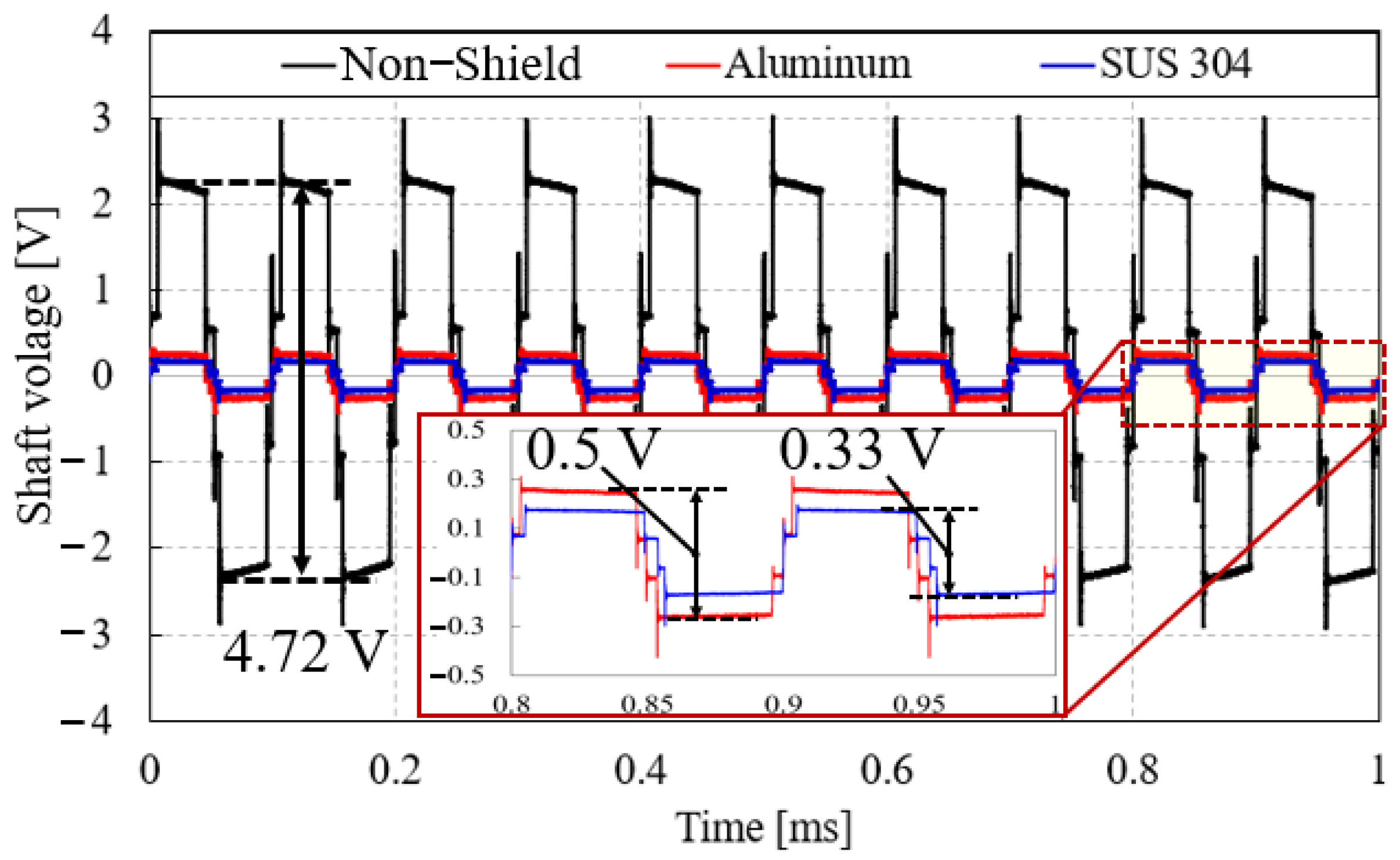
- A method of reducing shaft voltage was proposed using a novel structural shield ring.
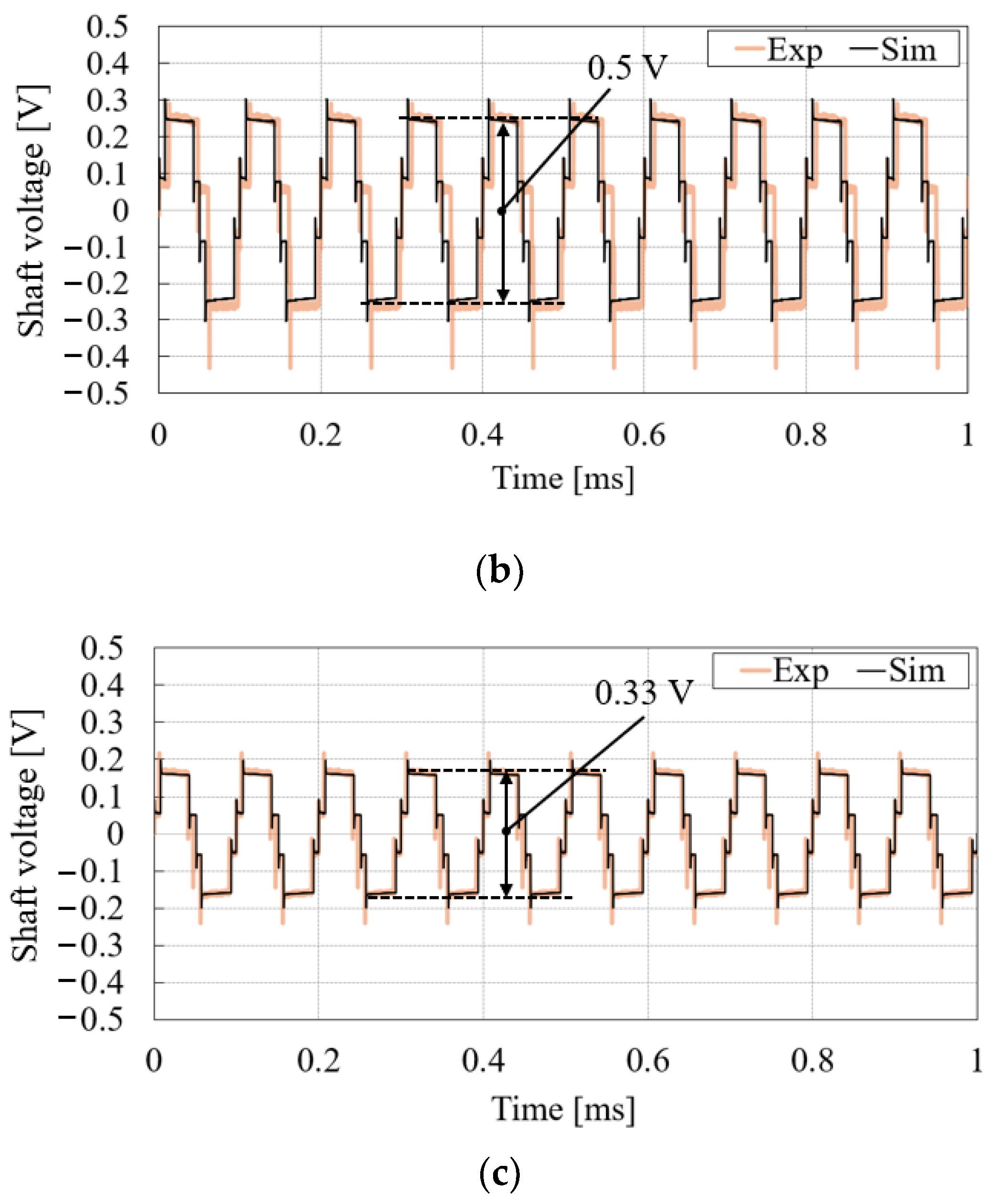
- (b)
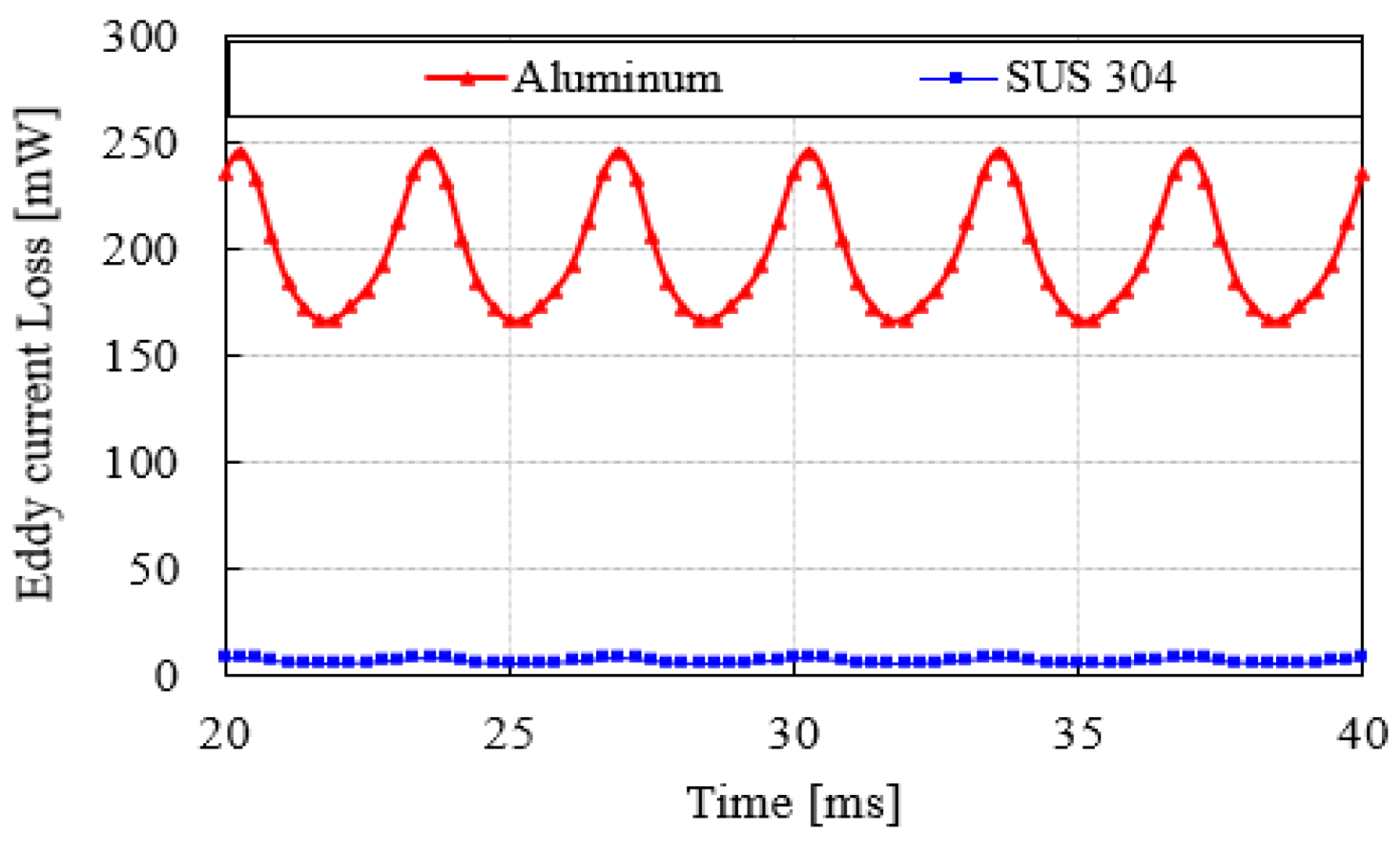
- The proposed technology was verified through experiments. Additionally, a structure that improved the cooling performance of the motor through a shield ring was proposed.
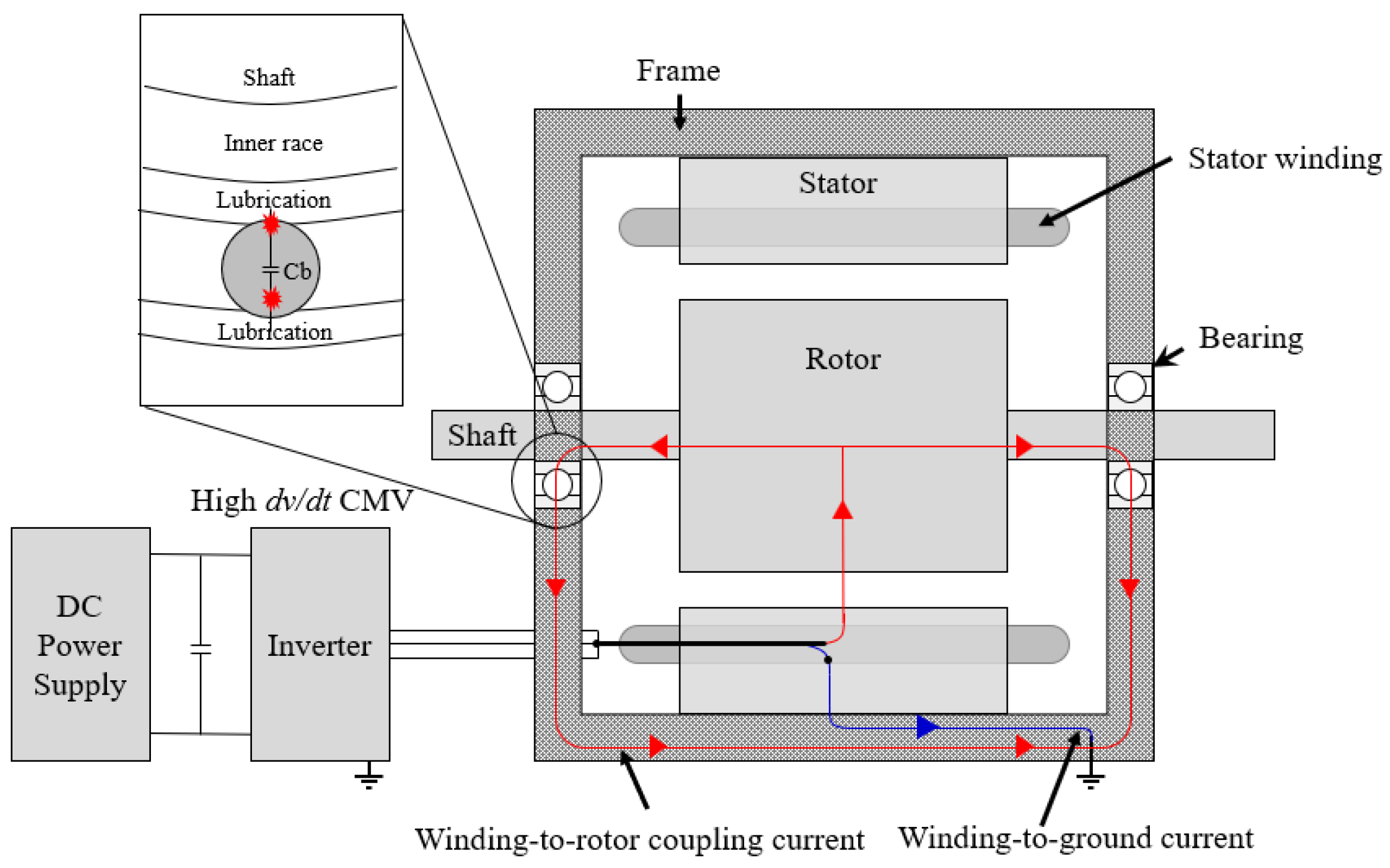
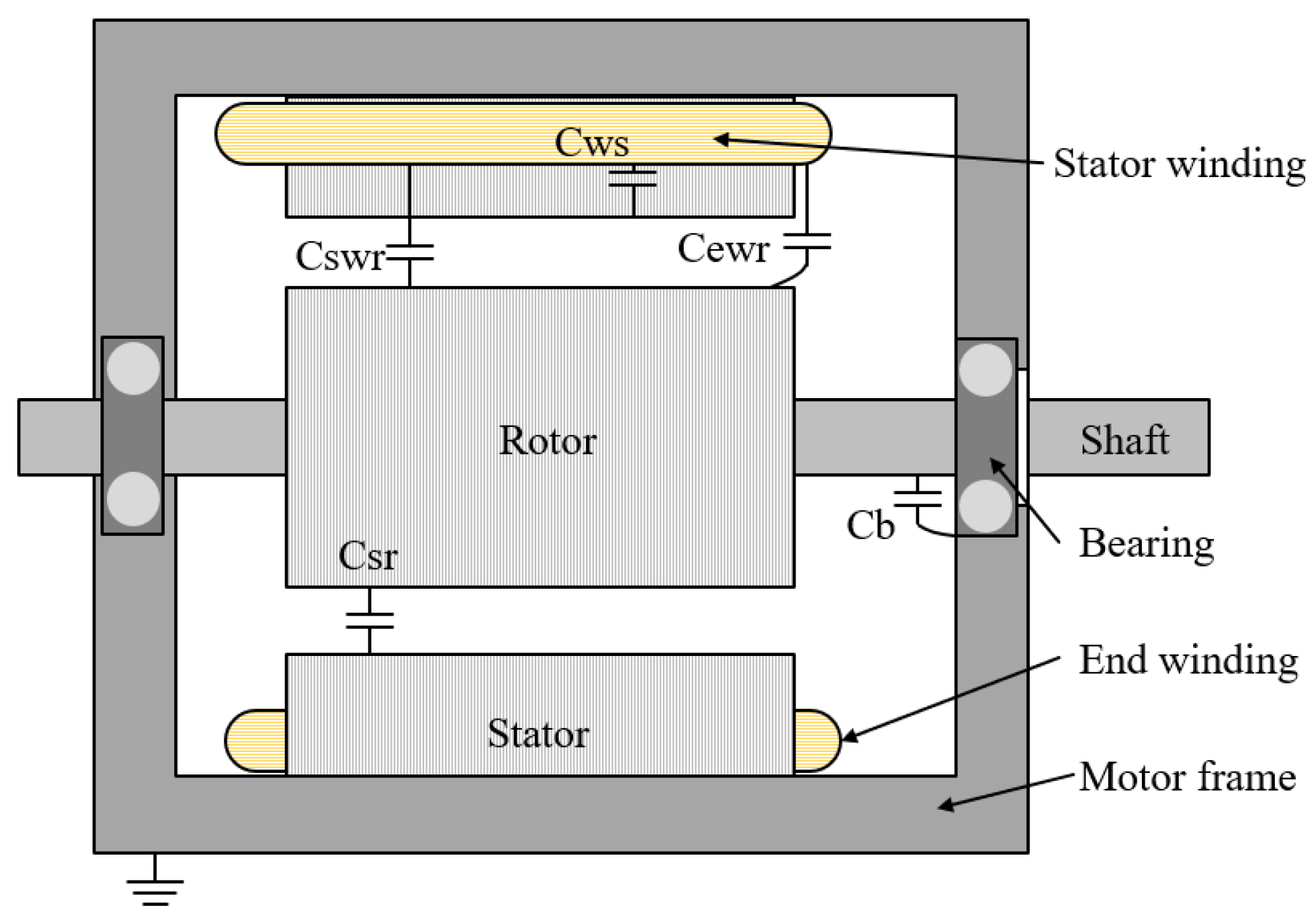
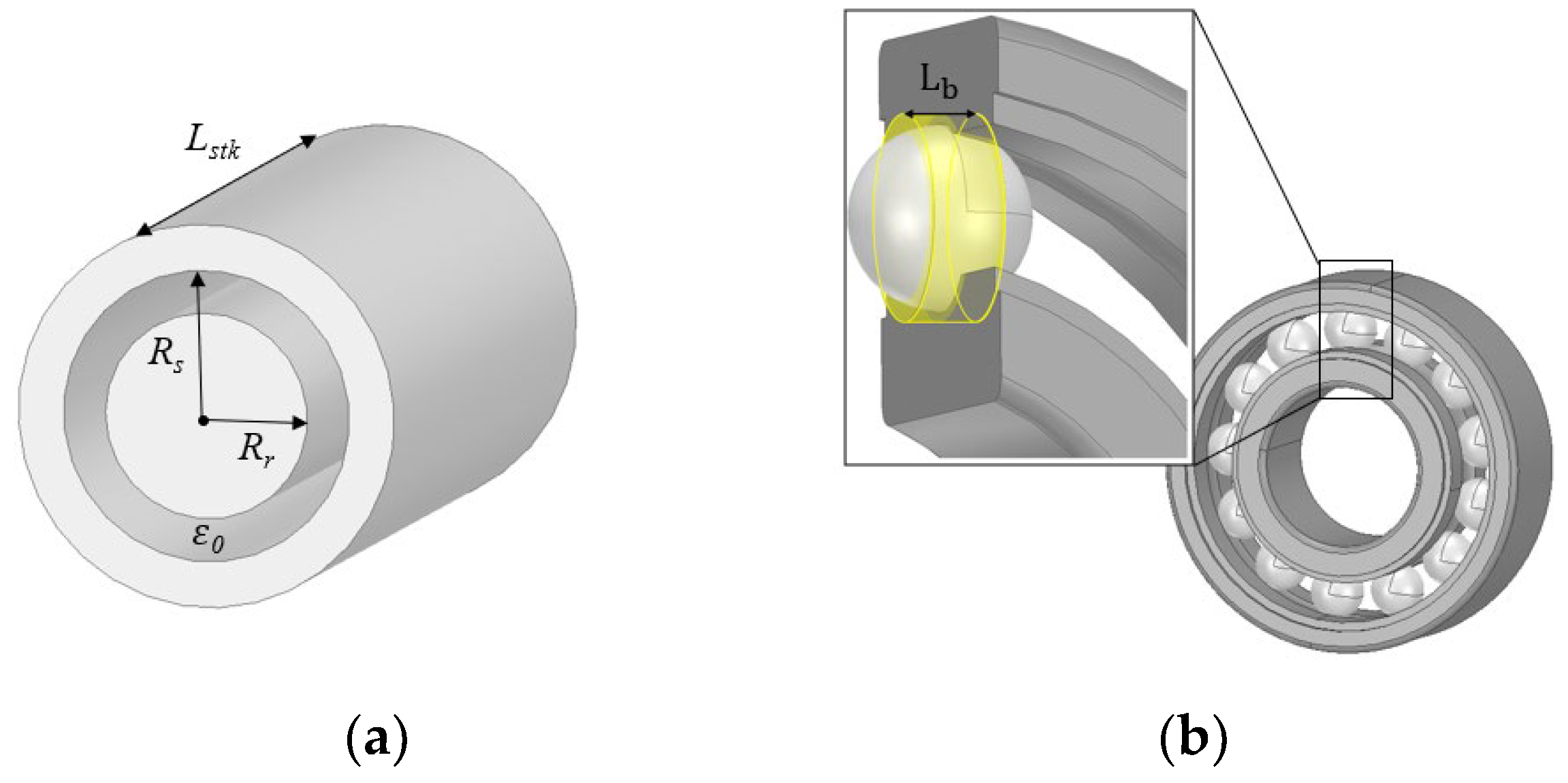
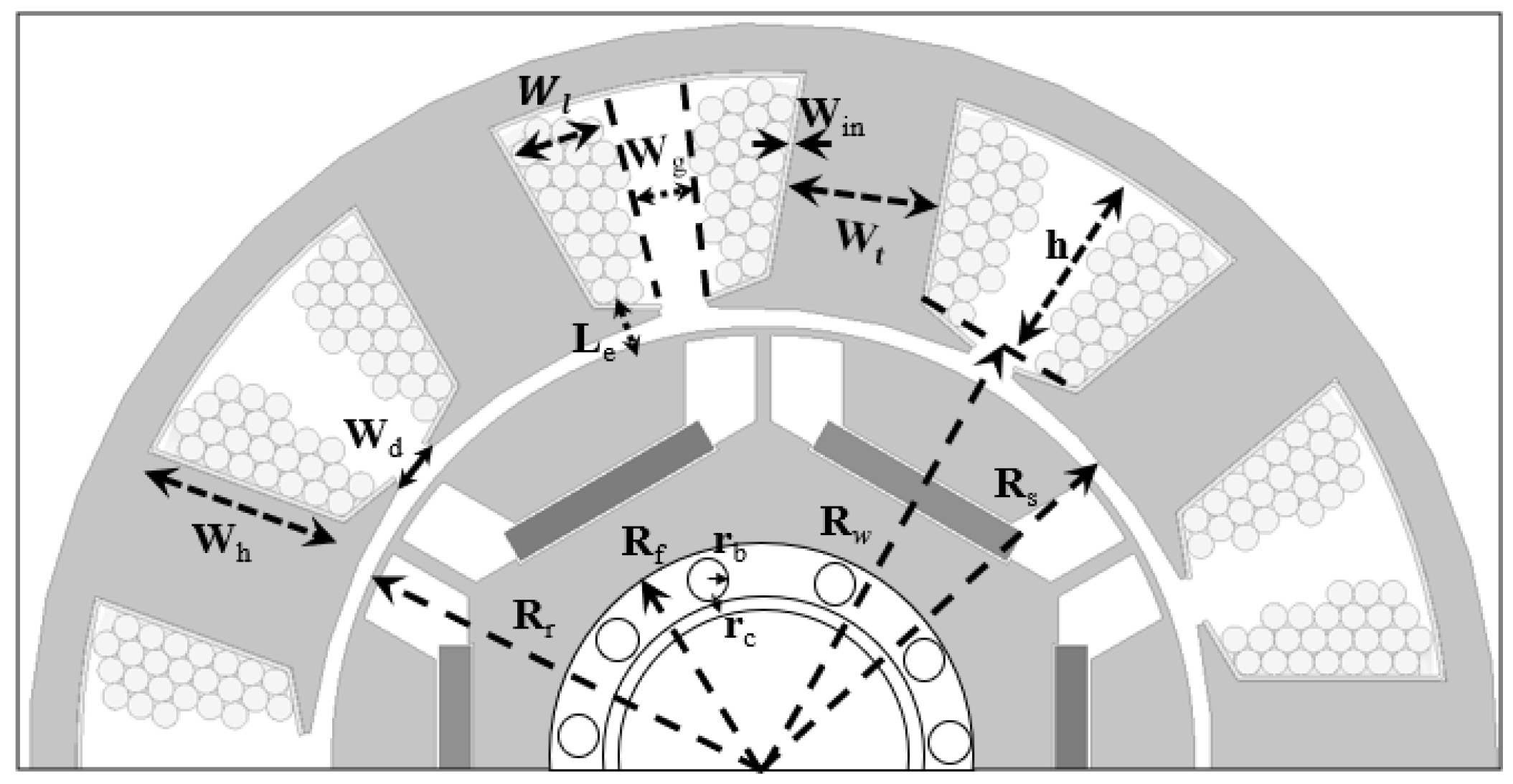
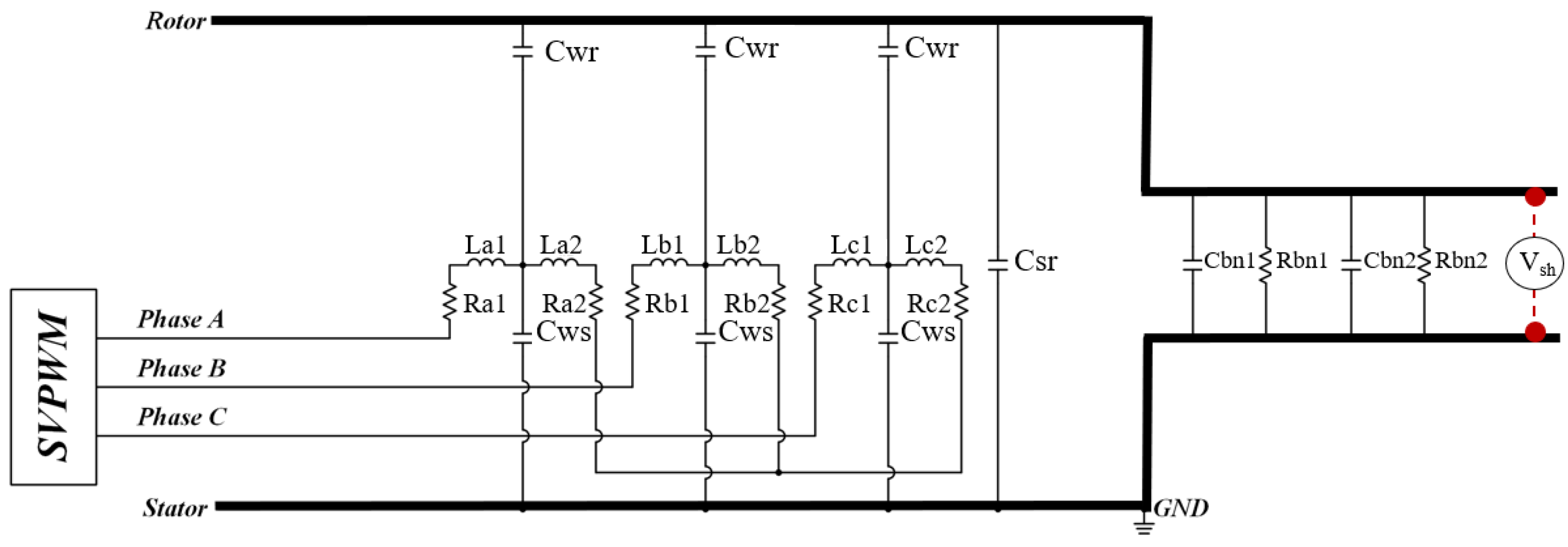
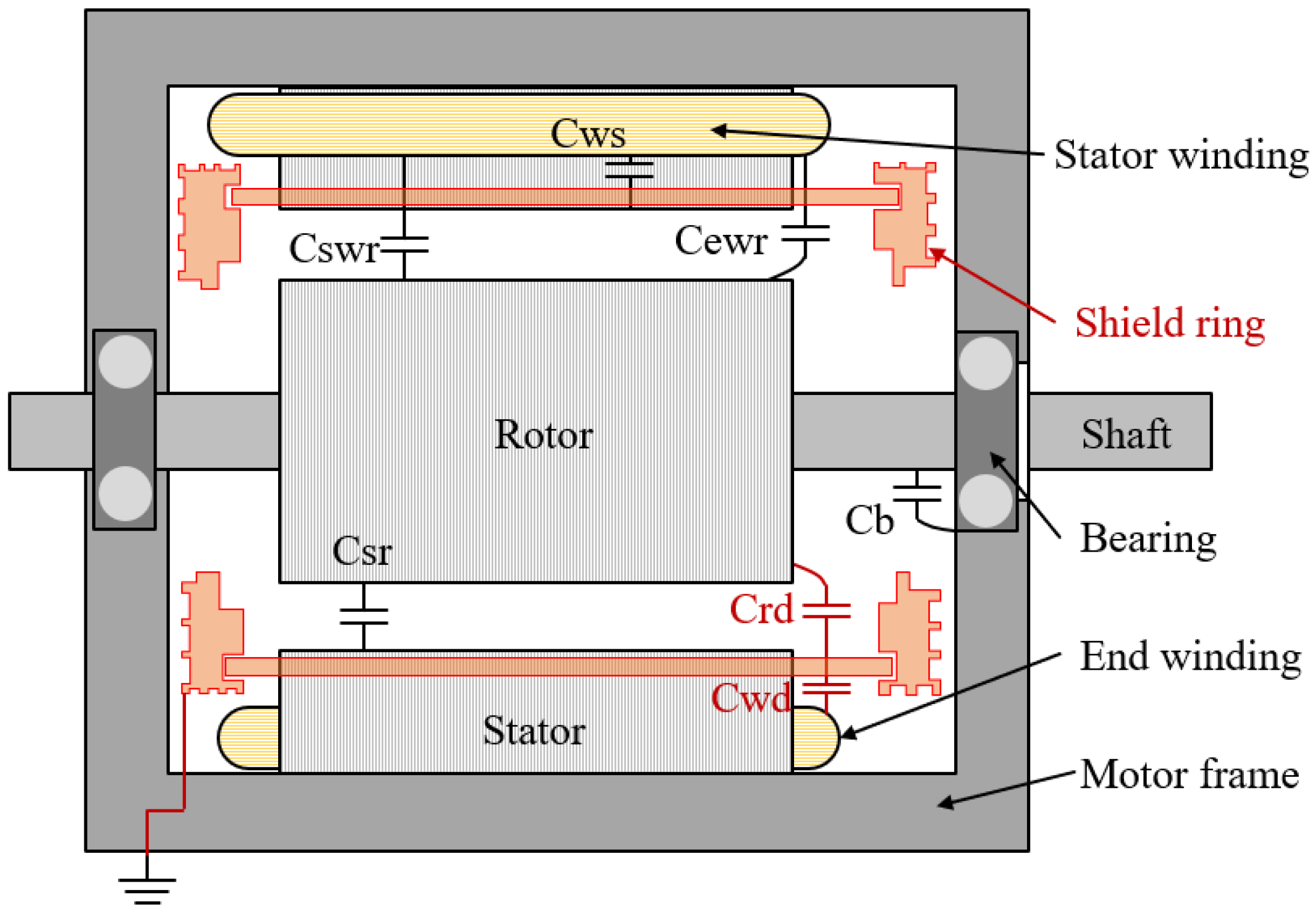
2. Parasitic Capacitance Analysis and Shaft Voltage of IPMSM
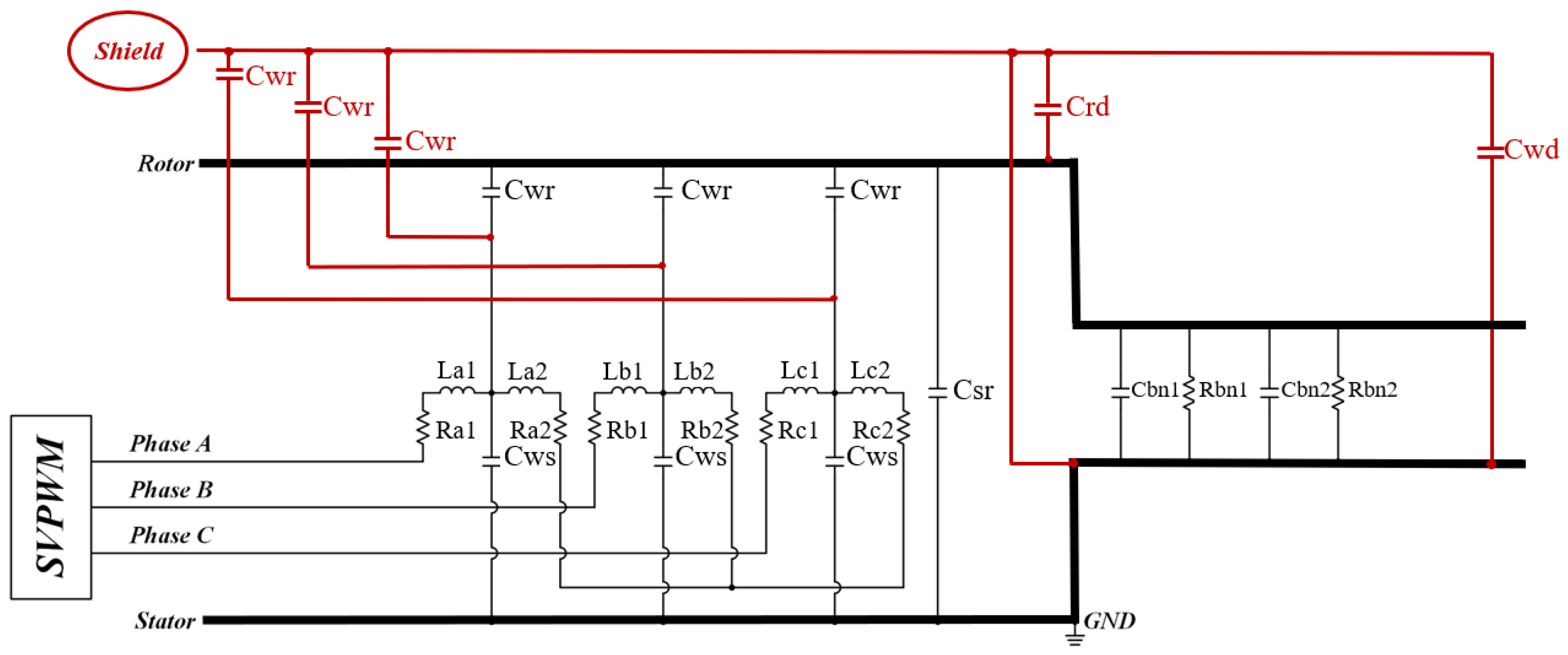
3. Shaft Voltage Reduction Technique Using Shield Ring
4. Results and Discussion
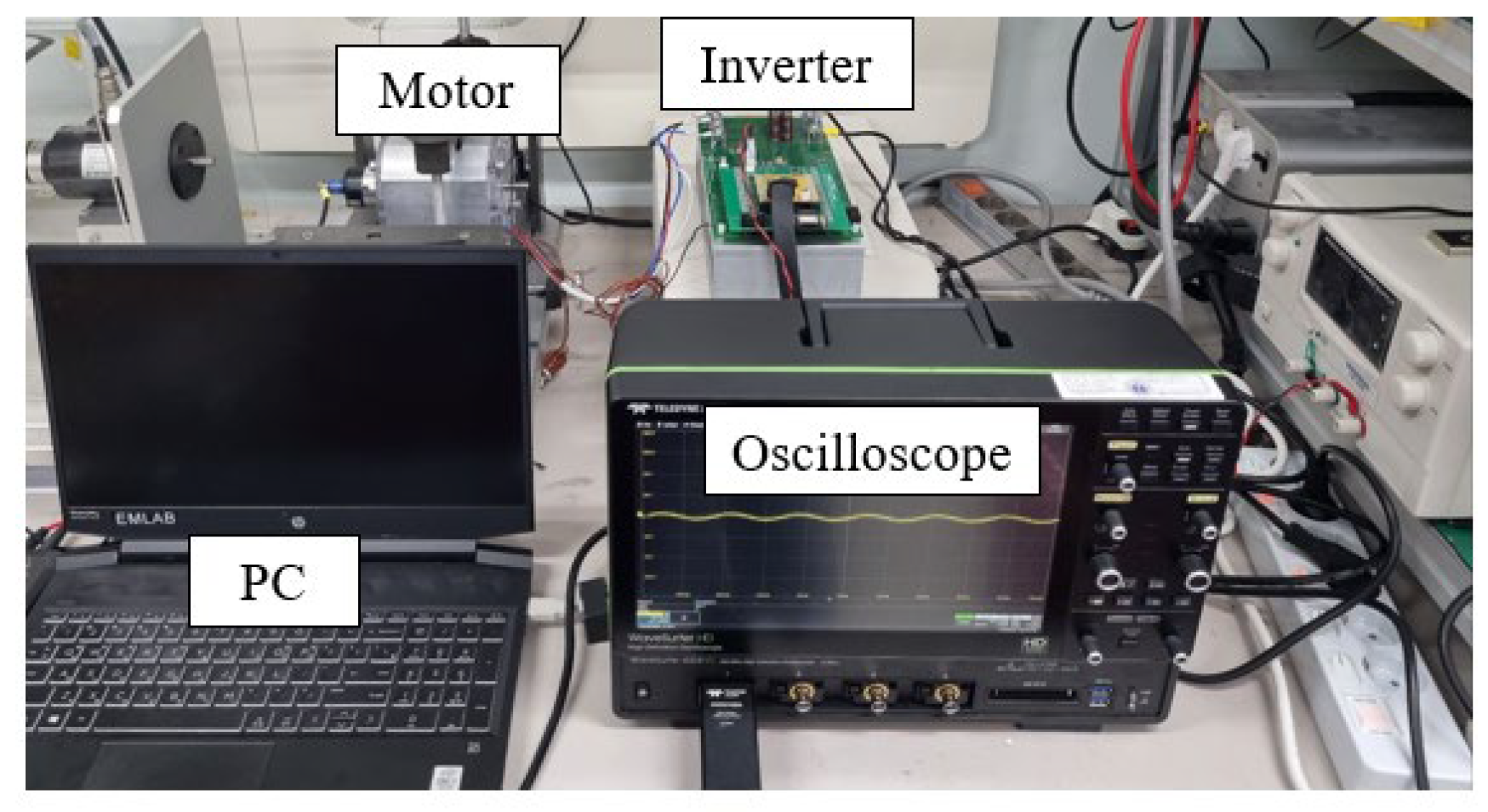
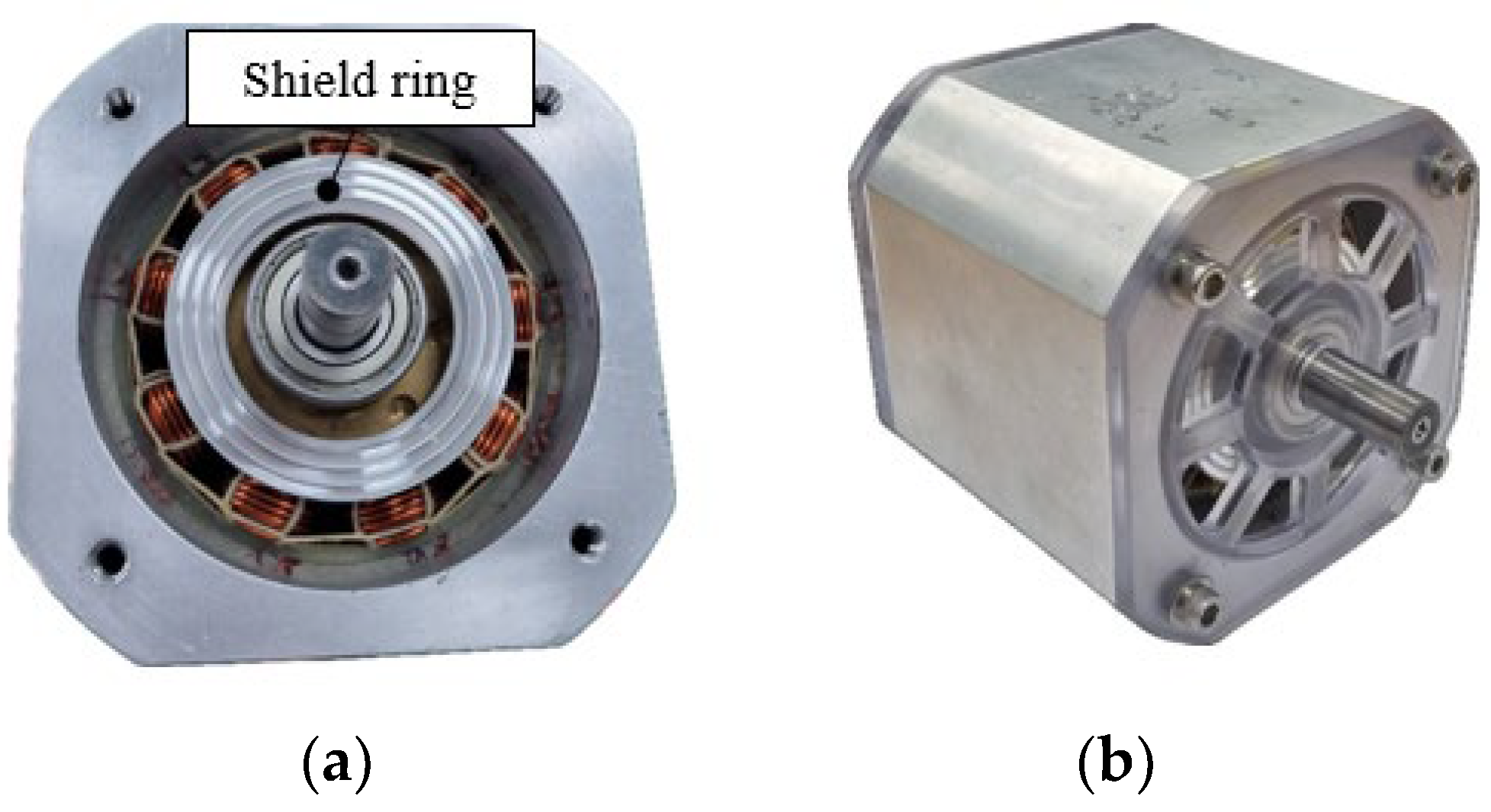
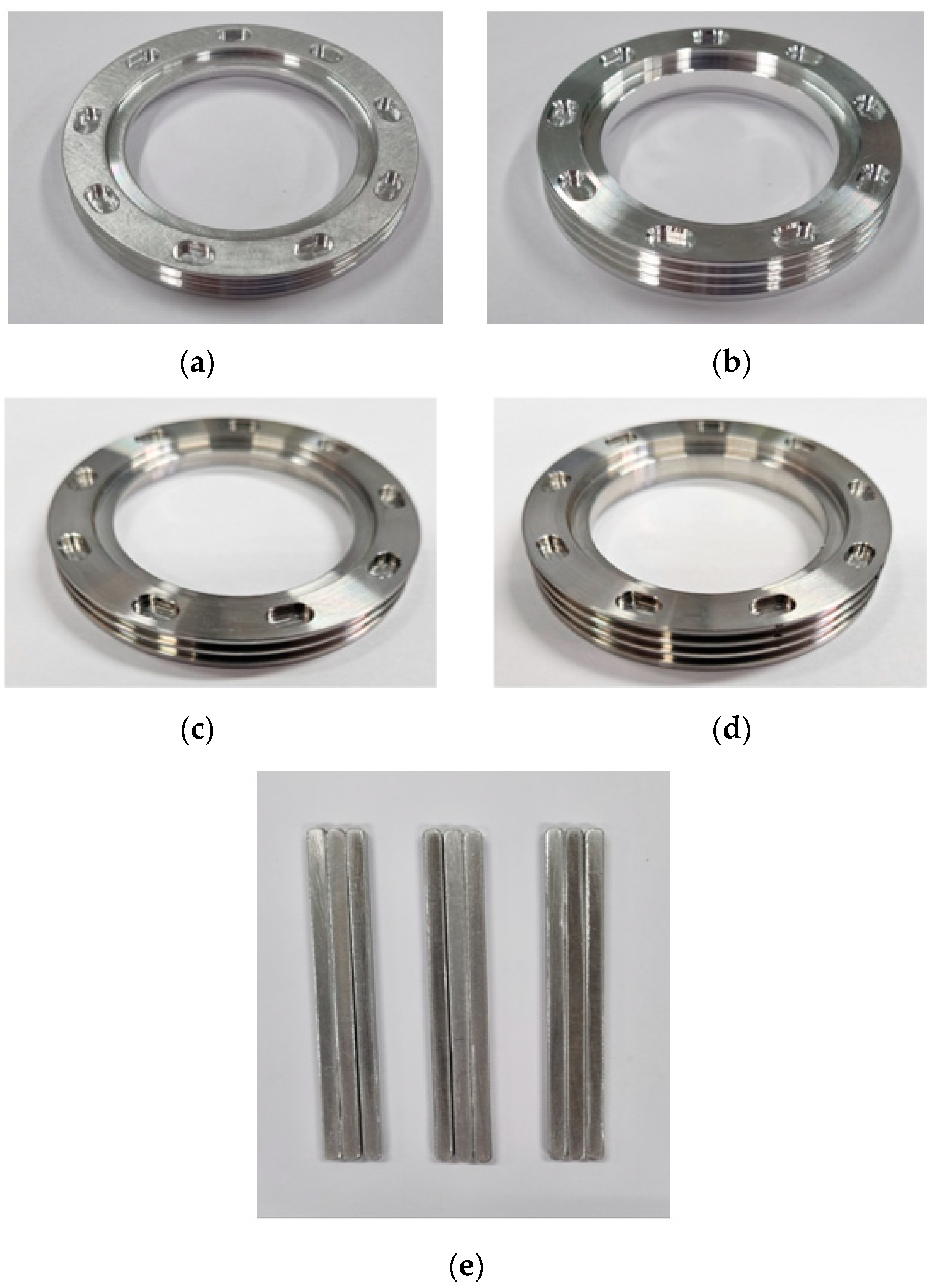
4.1. Experimental Setup
4.2. Verification Results for Reducing Shaft Voltage of IPMSM
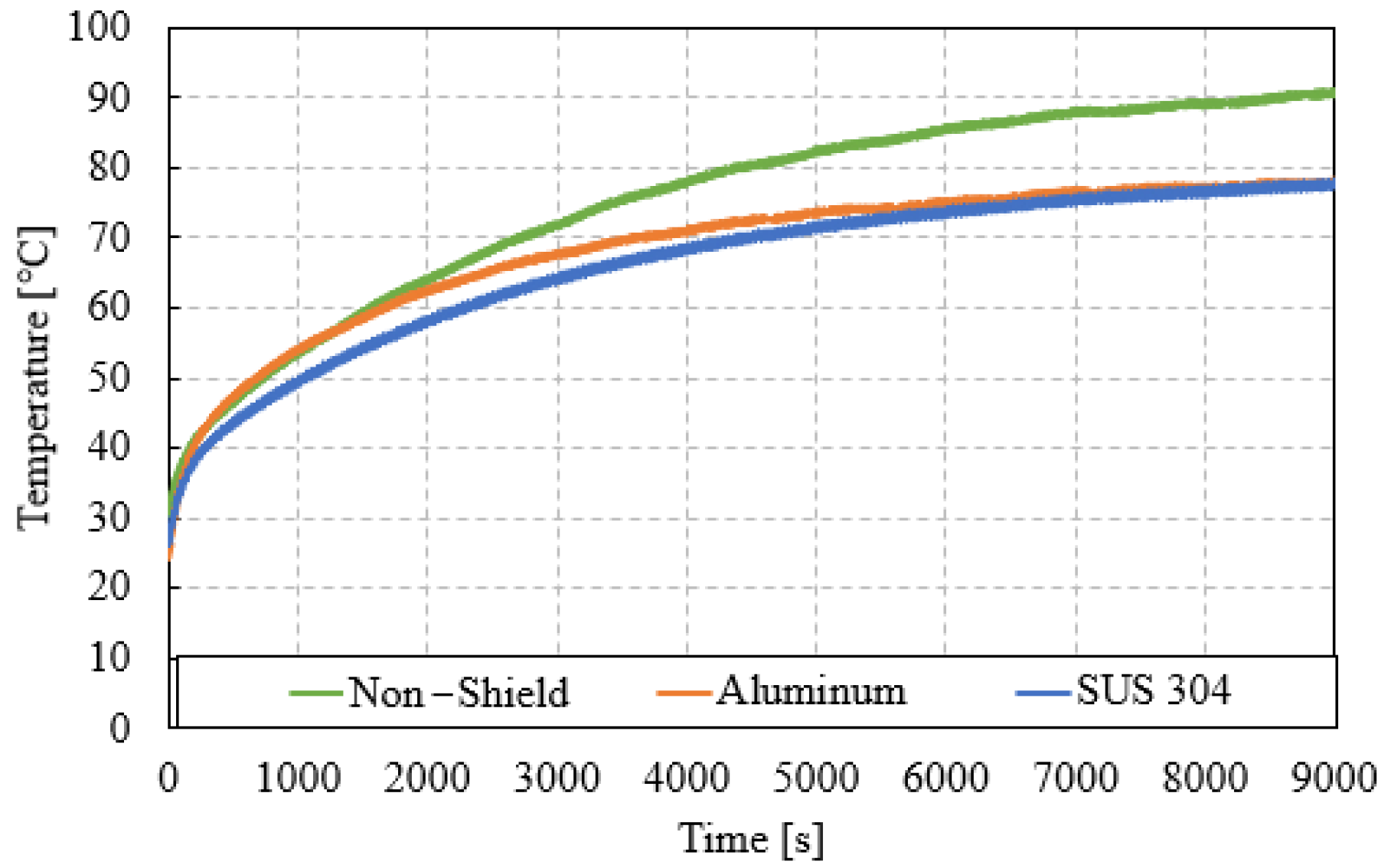
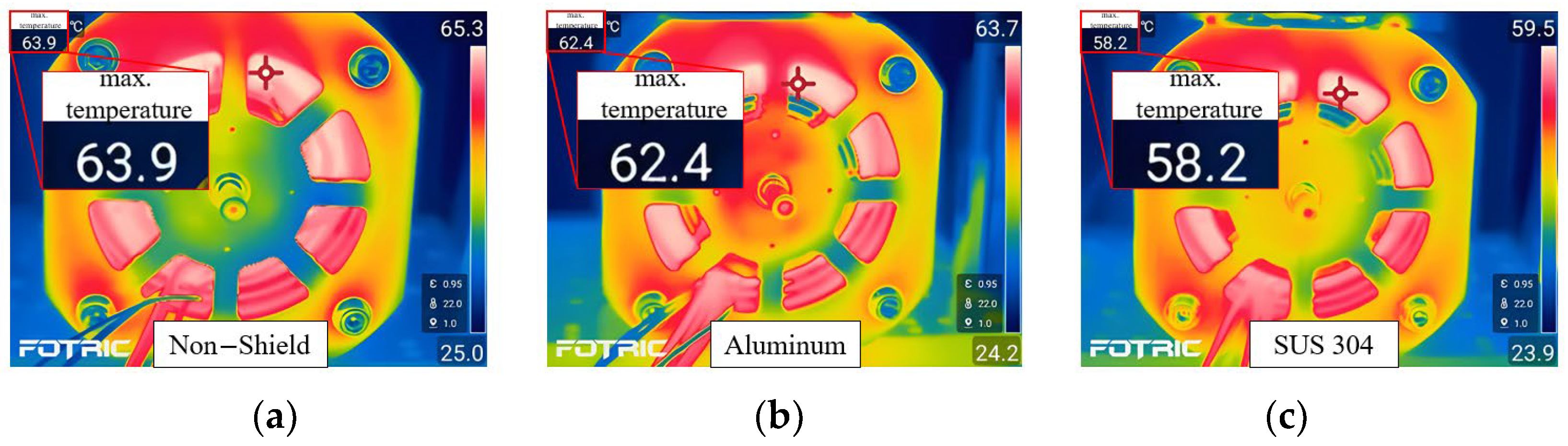
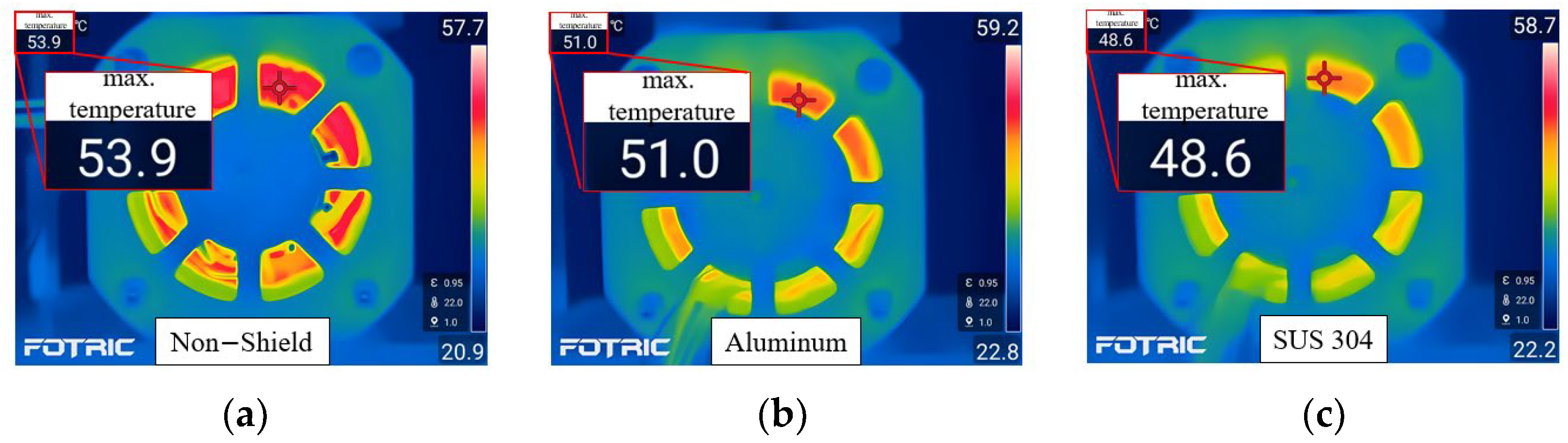
4.3. Temperature Analysis of IPMSM Considering Shield Ring
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Niu, G.; Shang, F.; Krishnamurthy, M.; Garcia, J.M. Design and Analysis of an Electric Hydraulic Hybrid Powertrain in Electric Vehicles. IEEE Trans. Transp. Electrif. 2017, 3, 48–57. [Google Scholar] [CrossRef]
- Zhou, L.; Zhao, Y.; Li, D.; Wang, Z. State-of-Health Estimation for LiFePO4 Battery System on Real-World Electric Vehicles Considering Aging Stage. IEEE Trans. Transp. Electrif. 2022, 8, 1724–1733. [Google Scholar] [CrossRef]
- Zhang, X.; Wang, Y.; Yuan, X.; Shen, Y.; Lu, Z. Adaptive Dynamic Surface Control with Disturbance Observers for Battery/Supercapacitor-Based Hybrid Energy Sources in Electric Vehicles. IEEE Trans. Transp. Electrif. 2023, 9, 5165–5181. [Google Scholar] [CrossRef]
- Popescu, M.; Goss, J.; Staton, D.A.; Hawkins, D.; Chong, Y.C.; Boglietti, A. Electrical Vehicles—Practical Solutions for Power Traction Motor Systems. IEEE Trans. Ind. Appl. 2018, 54, 2751–2762. [Google Scholar] [CrossRef]
- Zhang, Y.; Ai, Z.; Chen, J.; You, T.; Du, C.; Deng, L. Energy-Saving Optimization and Control of Autonomous Electric Vehicles with Considering Multiconstraints. IEEE Trans. Cybern. 2022, 52, 10869–10881. [Google Scholar] [CrossRef] [PubMed]
- Liu, Y.; Liu, K.; Zhou, Y.; Chen, Y.; Wei, D.; Zhou, S.; Luan, H. Study on the Design and Speed Ratio Control Strategy of Continuously Variable Transmission for Electric Vehicle. IEEE Access 2023, 11, 107880–107891. [Google Scholar] [CrossRef]
- Jelodar, Y.J.; Salari, O.; Youssef, M.Z.; Ebrahimi, J.; Bakhshai, A. A Novel Control Scheme for Traction Inverters in Electric Vehicles with an Optimal Efficiency Across the Entire Speed Range. IEEE Access 2024, 12, 25906–25916. [Google Scholar] [CrossRef]
- Jung, C. Power Up with 800-V Systems: The benefits of upgrading voltage power for battery-electric passenger vehicles. IEEE Electrif. Mag. 2017, 5, 53–58. [Google Scholar] [CrossRef]
- Aghabali, I.; Bauman, J.; Kollmeyer, P.J.; Wang, Y.; Bilgin, B.; Emadi, A. 800-V Electric Vehicle Powertrains: Review and Analysis of Benefits, Challenges, and Future Trends. IEEE Trans. Transp. Electrif. 2021, 7, 927–948. [Google Scholar] [CrossRef]
- Wu, S.-T.; Chiu, Y.-W. Implementation of a Bidirectional 400–800 V Wireless EV Charging System. IEEE Access 2024, 12, 26667–26682. [Google Scholar] [CrossRef]
- Cittanti, D.; Stella, F.; Vico, E.; Liu, C.; Shen, J.; Xiu, G.; Bojoi, R. Analysis, Design, and Experimental Assessment of a High Power Density Ceramic DC-Link Capacitor for a 800 V 550 kVA Electric Vehicle Drive Inverter. IEEE Trans. Ind. Appl. 2023, 59, 7078–7091. [Google Scholar] [CrossRef]
- Ding, X.; Du, M.; Duan, C.; Guo, H.; Xiong, R.; Xu, J.; Cheng, J.; kwong Luk, P.C. Analytical and Experimental Evaluation of SiC-Inverter Nonlinearities for Traction Drives Used in Electric Vehicles. IEEE Trans. Veh. Technol. 2018, 67, 146–159. [Google Scholar] [CrossRef]
- Wang, W.; Song, Q.; Zhang, S.; Li, Y.; Ahmad, M.; Gong, Y. The Loss Analysis and Efficiency Optimization of Power Inverter Based on SiC mosfets Under the High-Switching Frequency. IEEE Trans. Ind. Appl. 2021, 57, 1521–1534. [Google Scholar] [CrossRef]
- Qiu, Z.; Huang, X.; Ma, K.; Kong, Z.; Liu, X. Sideband Vibro-Acoustic Responses and Improvements with Different Pulsewidth Modulation Strategies in Permanent Magnet Synchronous Motor for Electric Vehicle. IEEE J. Emerg. Sel. Top. Power Electron. 2022, 10, 7098–7108. [Google Scholar] [CrossRef]
- Phukan, R.; Zhao, X.; Asfaux, P.; Dong, D.; Burgos, R. Investigation of Staggered PWM Scheme for AC Common Mode Current Minimization in SiC-Based Three-Phase Inverters. IEEE Trans. Transp. Electrif. 2022, 8, 4378–4390. [Google Scholar] [CrossRef]
- Guo, F.; Diab, A.M.; Yeoh, S.S.; Yang, T.; Bozhko, S.; Wheeler, P.; Zhao, Y. An Advanced Dual-Carrier-Based Multi-Optimized PWM Strategy of Three-Level Neutral-Point-Clamped Converters for More-Electric-Aircraft Applications. IEEE Trans. Energy Convers. 2024, 39, 356–367. [Google Scholar] [CrossRef]
- Singleton, R.K.; Strangas, E.G.; Aviyente, S. The Use of Bearing Currents and Vibrations in Lifetime Estimation of Bearings. IEEE Trans. Ind. Inform. 2017, 13, 1301–1309. [Google Scholar] [CrossRef]
- Hava, A.M.; Ün, E. A High-Performance PWM Algorithm for Common-Mode Voltage Reduction in Three-Phase Voltage Source Inverters. IEEE Trans. Power Electron. 2011, 26, 1998–2008. [Google Scholar] [CrossRef]
- Muetze, A.; Binder, A. Calculation of Motor Capacitances for Prediction of the Voltage Across the Bearings in Machines of Inverter-Based Drive Systems. IEEE Trans. Ind. Appl. 2007, 43, 665–672. [Google Scholar] [CrossRef]
- Muetze, A.; Tamminen, J.; Ahola, J. Influence of Motor Operating Parameters on Discharge Bearing Current Activity. IEEE Trans. Ind. Appl. 2011, 47, 1767–1777. [Google Scholar] [CrossRef]
- Chin, J.-W.; Kim, D.-J.; Park, S.; Jung, H.-C. Comprehensive Experimental Study on Shaft Voltage of Traction Motor with Ceramic Bearing for Electric Vehicles. In Proceedings of the 2023 IEEE Vehicle Power and Propulsion Conference (VPPC), Milan, Italy, 24–27 October 2023; pp. 1–6. [Google Scholar]
- Im, J.-H.; Lee, Y.-K.; Park, J.-K.; Hur, J. Shaft Voltage Reduction Method Using Carrier Wave Phase Shift in IPMSM. Energies 2021, 14, 6924. [Google Scholar] [CrossRef]
- Muetze, A.; Oh, H.W. Design Aspects of Conductive Microfiber Rings for Shaft-Grounding Purposes. IEEE Trans. Ind. Appl. 2008, 44, 1749–1757. [Google Scholar] [CrossRef]
- Park, J.-K.; Wellawatta, T.R.; Choi, S.-J.; Hur, J. Mitigation Method of the Shaft Voltage According to Parasitic Capacitance of the PMSM. IEEE Trans. Ind. Appl. 2017, 53, 4441–4449. [Google Scholar] [CrossRef]
- Zhao, Z.; Zhong, Y.; Gao, H.; Yuan, L.; Lu, T. Hybrid Selective Harmonic Elimination PWM for Common-Mode Voltage Reduction in Three-Level Neutral-Point-Clamped Inverters for Variable Speed Induction Drives. IEEE Trans. Power Electron. 2012, 27, 1152–1158. [Google Scholar] [CrossRef]
- Kwak, S.; Mun, S.-K. Model Predictive Control Methods to Reduce Common-Mode Voltage for Three-Phase Voltage Source Inverters. IEEE Trans. Power Electron. 2015, 30, 5019–5035. [Google Scholar] [CrossRef]
- Nakahama, T.; Biswas, D.; Kawano, K.; Ishibashi, F. Improved cooling performance of large motors using fans. IEEE Trans. Energy Convers. 2006, 21, 324–331. [Google Scholar] [CrossRef]
- Wang, H.; Liu, X.; Kang, M.; Guo, L.; Li, X. Oil Injection Cooling Design for the IPMSM Applied in Electric Vehicles. IEEE Trans. Transp. Electrif. 2022, 3, 3427–3440. [Google Scholar] [CrossRef]
- Park, J.-K.; Wellawatta, T.R.; Ullah, Z.; Hur, J. New Equivalent Circuit of the IPM-Type BLDC Motor for Calculation of Shaft Voltage by Considering Electric and Magnetic Fields. IEEE Trans. Ind. Appl. 2016, 52, 3763–3771. [Google Scholar] [CrossRef]
- Balanis, C.A. Advanced Engineering Electromagnetics, 2nd ed.; Wiley: Hoboken, NJ, USA, 2012; pp. 56–59. [Google Scholar]
- Xu, Z.; Xu, Y.; Gai, Y.; Liu, W. Thermal Management of Drive Motor for Transportation: Analysis Methods, Key Factors in Thermal Analysis, and Cooling Methods—A Review. IEEE Trans. Transp. Electrif. 2023, 9, 4751–4774. [Google Scholar] [CrossRef]
























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Item | Appearance | Value | Unit |
|---|---|---|---|
| Wh | Coil height that lay on the stator | 12 | mm |
| Wt | Width of the stator teeth | 9.7 | mm |
| Win | Width of the slot insulation paper | 1 | mm |
| Wd | Slot opening of the stator | 3 | mm |
| Wl | Width of the coil from coil side | 6 | mm |
| Wg | Gap between adjacent winding | 0.12 | mm |
| Rr | Radius of the rotor | 27 | mm |
| Rs | Radius of the stator | 28 | mm |
| Rw | Distance of the winding from the rotor axis | 30 | mm |
| Rf | Radius to the shaft | 7.5 | mm |
| Rd | Radius of shaft hole in the frame | 8 | mm |
| Le | Length between the rotor and end winding | 3 | mm |
| Lr | Rotor plate | 8 | mm |
| Lh | Height between rotor and end winding | 4 | mm |
| Lstk | Stack length of the stator | 40 | mm |
| h | Height of the coil | 12 | mm |
| rb | Radius of the ball of bearing | 2.97 | mm |
| rc | Radius of clearance with ball | 2.98 | mm |
| Permittivity of the insulation | 2.5 | - | |
| Permittivity of lubricant | 2 | - | |
| Permittivity of the air | 8.85 × 10−12 | - | |
| Nb | No. of balls in the bearing (6202 z/6201 z) | 8/7 | |
| S | Number of slots | 9 | - |
| Name | Relative Permeability | Bulk Conductivity [siemens/m] | Mass Density [kg/m3] |
|---|---|---|---|
| Aluminum | 1.00002 | 38,000,000 | 2699.8 |
| SUS 304 | 1 | 1,395,200 | 7954.3 |
| Item | Unit | Value |
|---|---|---|
| Number of poles | - | 6 |
| Number of slots | - | 9 |
| Rated speed | RPM | 1000 |
| Rated current | Arms | 10 |
| Rated torque | Nm | 1.1 |
| Switching frequency | kHz | 10 |
| Rated power | W | 115 |
| DC voltage | V | 48 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kang, J.-K.; Heo, J.-H.; Kim, S.-H.; Hur, J. Novel Structure of Shield Ring to Reduce Shaft Voltage and Improve Cooling Performance of Interior Permanent Magnet Synchronous Motor. Electronics 2024, 13, 1535. https://doi.org/10.3390/electronics13081535
Kang J-K, Heo J-H, Kim S-H, Hur J. Novel Structure of Shield Ring to Reduce Shaft Voltage and Improve Cooling Performance of Interior Permanent Magnet Synchronous Motor. Electronics. 2024; 13(8):1535. https://doi.org/10.3390/electronics13081535
Chicago/Turabian StyleKang, Jun-Kyu, Jun-Hyeok Heo, Su-Hwan Kim, and Jin Hur. 2024. "Novel Structure of Shield Ring to Reduce Shaft Voltage and Improve Cooling Performance of Interior Permanent Magnet Synchronous Motor" Electronics 13, no. 8: 1535. https://doi.org/10.3390/electronics13081535
APA StyleKang, J. -K., Heo, J. -H., Kim, S. -H., & Hur, J. (2024). Novel Structure of Shield Ring to Reduce Shaft Voltage and Improve Cooling Performance of Interior Permanent Magnet Synchronous Motor. Electronics, 13(8), 1535. https://doi.org/10.3390/electronics13081535