
Software-Defined Networking-Enabled Efficient Default Route Configuration in IEEE 802.15.4 Protocol: A Smart Algorithmic Approach


Abstract
:1. Introduction
- Use of an SDN-enabled controller that reduces the processing delay in the node.
- The best route selection is based on node battery level and distance between nodes.
- Use of IEEE 802.15.4 protocol for data transport between the sensor node and the controller.
- Proposal of an SDWSN architecture without network-level protocols.
2. Related Work
3. Proposed Algorithmic Approach
3.1. Route Generator Application
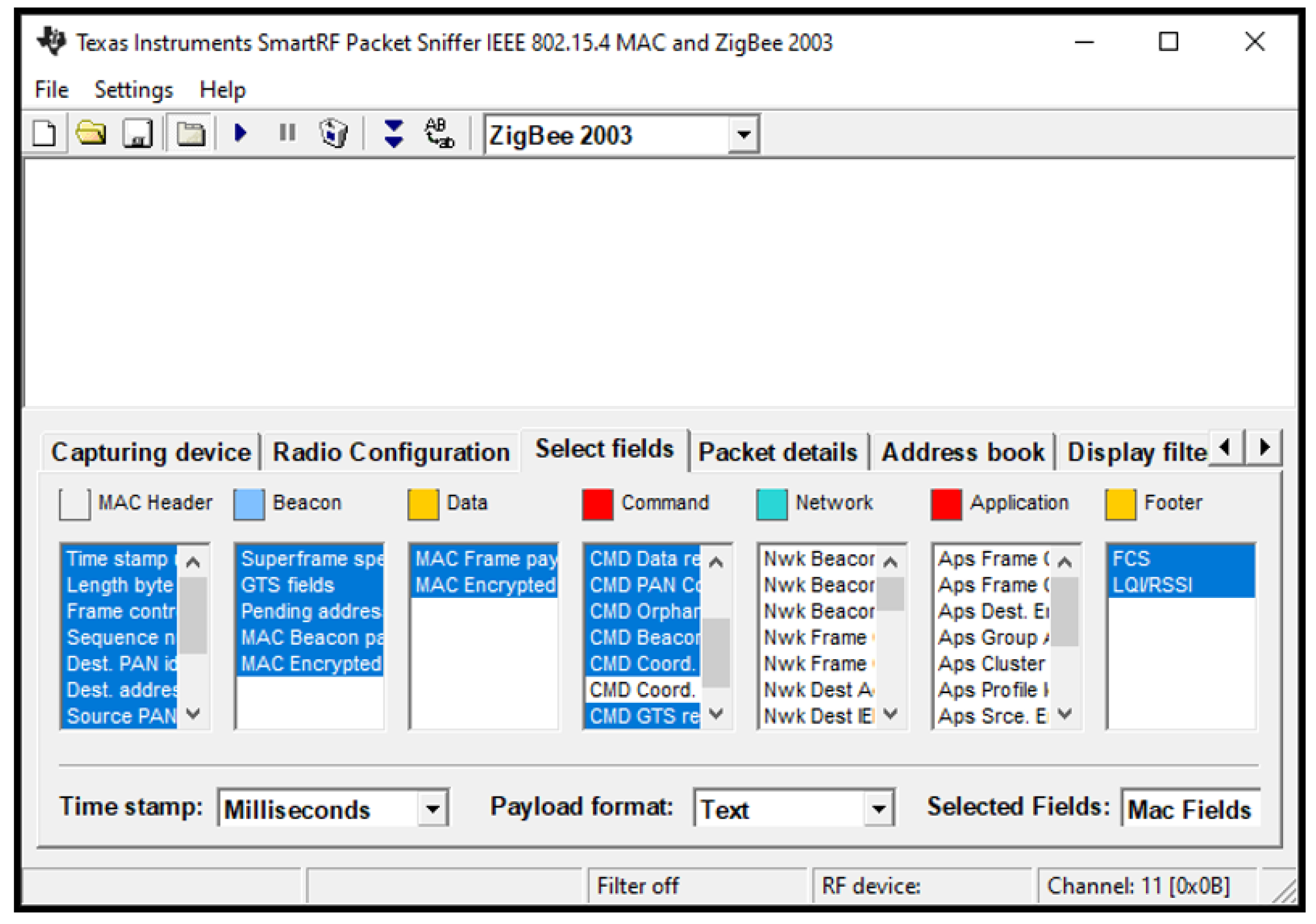
3.2. SmartRF Packett Sniffer
3.3. CC2531 USB Hardware
3.4. Operation of the Route Generator Application within the Network Prototype
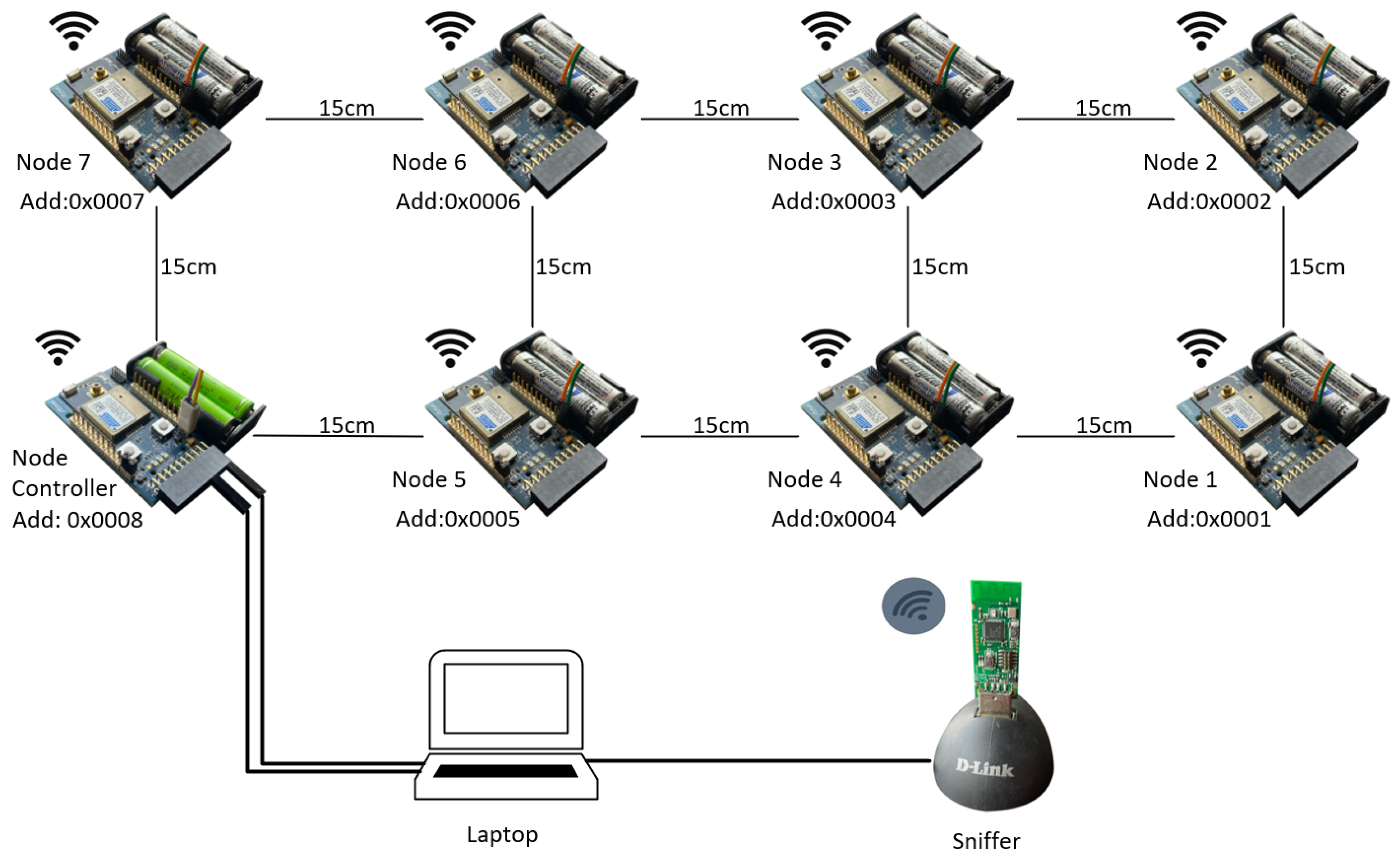
- Sensor nodes are fixed.
- There are several nodes within the coverage area of each node.
- Topology changes occur by adding or removing a node in the network.
- The nodes are configured to operate in non-slotted mode with the IEEE 802.15.4 standard (FFD) and do not utilize network-layer protocols or operating systems.
- The controller updates the route periodically at times defined at the beginning.
- ID_S: Identifier of the node that sends the neighbor table to the controller. This identifier is also stored within IEEE802.15.4 frames.
- NB: Node battery level.
- NS: Frame receive power level.
- ID_D: Identifier of the predefined route, located in each node. This identifier is also stored within IEEE802.15.4 frames.
- ID_DF: Node identifier of the node to which the predefined route will be modified. This identifier is also stored within IEEE802.15.4 frames.
- SRC_ADDR: Source node address.
- DST_ADDR: Destination node address.
- Neighbor_table: Stores NB, NS, and ID_S. This table is also stored within IEEE802.15.4 frames.
- Uplink_frame: Indicates whether a frame travels on an uplink or downlink.
| Algorithm 1: Sensor node pseudocode. |
 |
| Algorithm 2: Controller node pseudocode. |
 |
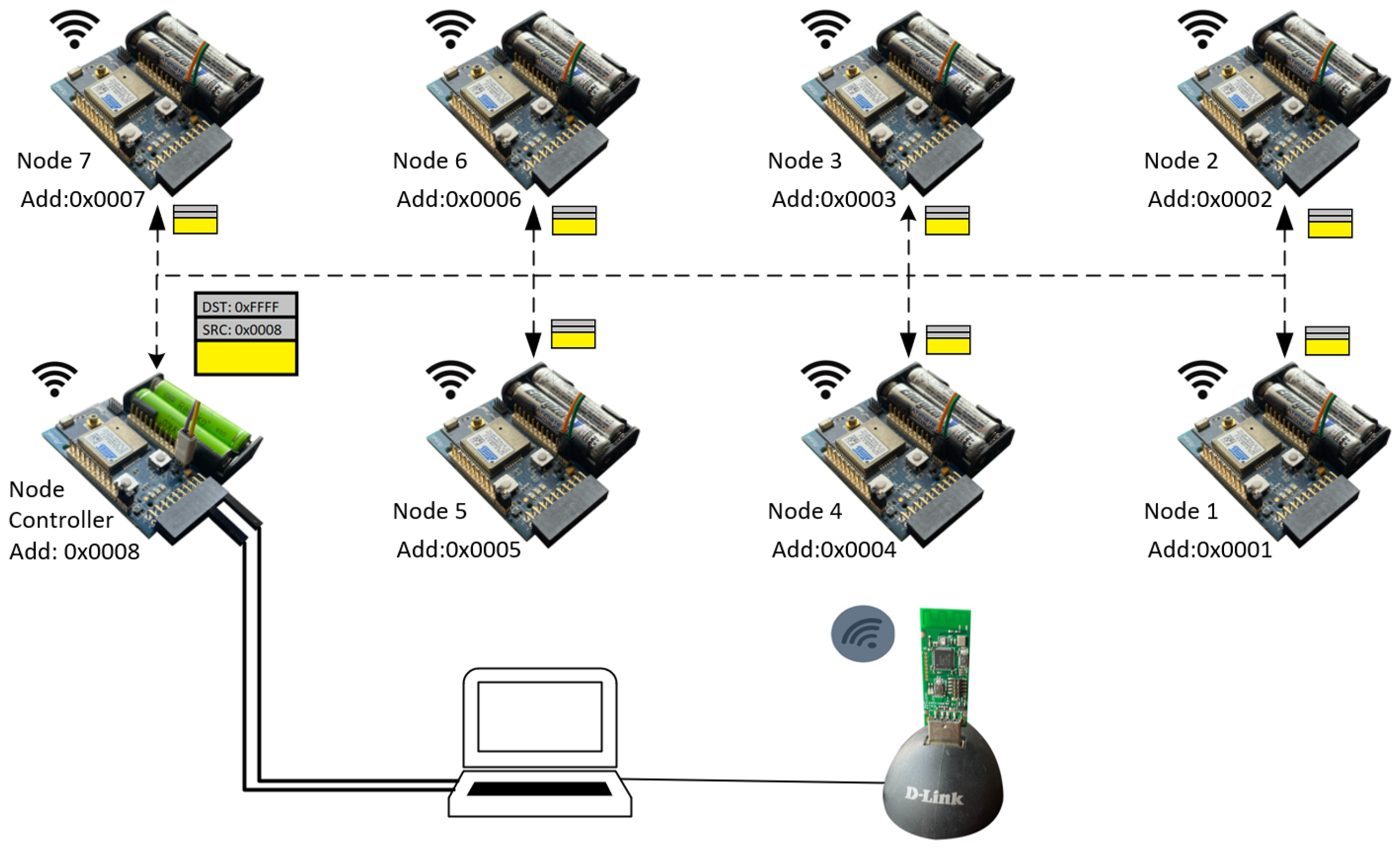
3.5. Uplink and Downlink
3.6. Default Route
3.7. Initial Default Route
3.8. Exchange of Initial Information
4. Results
4.1. Results with Kruskal’s Algorithm
4.2. Results with Dijistra’s Algorithm
4.3. Results Using a Pair of Nodes with Voltage Values Higher than the Others
4.3.1. Results with Kruskal’s Algorithm
4.3.2. Results with Dijistra’s Algorithm
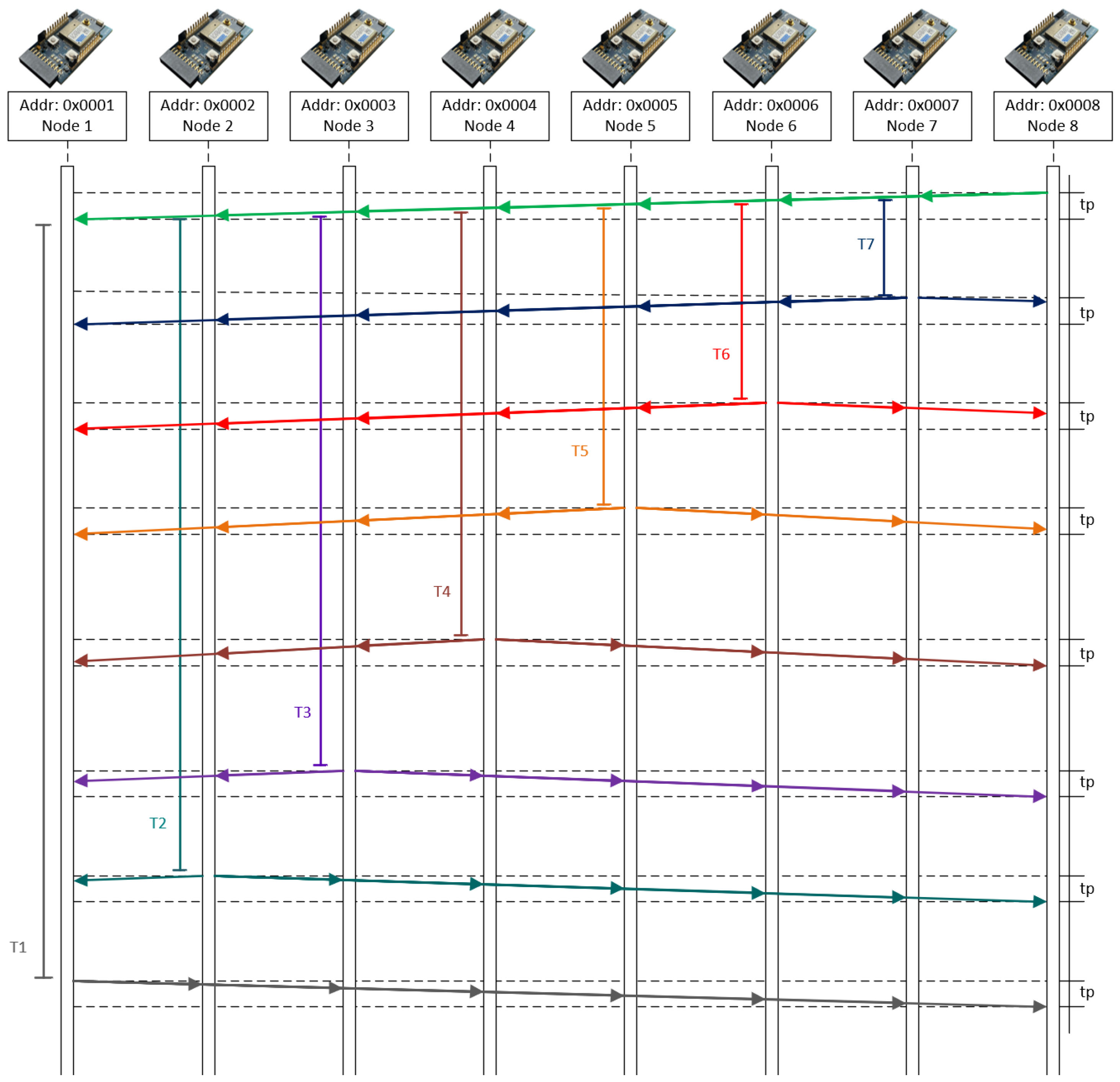
4.4. Transmission Time Measurement
4.4.1. Measurement of Times Corresponding to the First Test with the Kruskal Algorithm
4.4.2. Measurement of Times Corresponding to the Second Test with the Kruskal Algorithm
4.4.3. Measurement of Times Corresponding to the First Test with Dijkstra’s Algorithm
4.4.4. Measurement of Times Corresponding to the Second Test with Dijkstra’s Algorithm
4.5. Results Comparison
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Sisinni, E.; Saifullah, A.; Han, S.; Jennehag, U.; Gidlund, M. Industrial Internet of Things: Challenges, Opportunities, and Directions. IEEE Trans. Ind. Inform. 2018, 14, 4724–4734. [Google Scholar] [CrossRef]
- Ali, A.; Ming, Y.; Chakraborty, S.; Iram, S. A Comprehensive Survey on Real-Time Applications of WSN. Future Internet 2017, 9, 77. [Google Scholar] [CrossRef]
- Borges, L.M.; Velez, F.J.; Lebres, A.S. Survey on the Characterization and Classification of Wireless Sensor Network Applications. IEEE Commun. Surv. Tutor. 2014, 16, 1860–1890. [Google Scholar] [CrossRef]
- Fabbri, F.; Buratti, C.; Verdone, R. A Multi-Sink Multi-Hop Wireless Sensor Network Over a Square Region: Connectivity and Energy Consumption Issues. In Proceedings of the 2008 IEEE Globecom Workshops, New Orleans, LA, USA, 30 November–4 December 2008; pp. 1–6. [Google Scholar] [CrossRef]
- Kreutz, D.; Ramos, F.M.V.; Veríssimo, P.E.; Rothenberg, C.E.; Azodolmolky, S.; Uhlig, S. Software-Defined Networking: A Comprehensive Survey. Proc. IEEE 2015, 103, 14–76. [Google Scholar] [CrossRef]
- Modieginyane, K.M.; Letswamotse, B.B.; Malekian, R.; Abu-Mahfouz, A.M. Software defined wireless sensor networks application opportunities for efficient network management: A survey. Comput. Electr. Eng. 2018, 66, 274–287. [Google Scholar] [CrossRef]
- Acosta, C.E.; Gil-Castineira, F.; Costa-Montenegro, E.; Silva, J.S. Reliable Link Level Routing Algorithm in Pipeline Monitoring Using Implicit Acknowledgements. Sensors 2021, 21, 968. [Google Scholar] [CrossRef] [PubMed]
- Acosta, C.E.; Cali, D.; Espinosa, C. Autoconfiguration with Global Addresses Using IEEE 802.15.4 Standard in Multi-hop Networks. Enfoque UTE 2021, 12, 44–58. [Google Scholar] [CrossRef]
- Singh, P.K.; Paprzycki, M. Introduction on Wireless Sensor Networks Issues and Challenges in Current Era. In Handbook of Wireless Sensor Networks: Issues and Challenges in Current Scenario’s; Singh, P.K., Bhargava, B.K., Paprzycki, M., Kaushal, N.C., Hong, W.C., Eds.; Advances in Intelligent Systems and Computing; Springer International Publishing: Cham, Switzerland, 2020; pp. 3–12. [Google Scholar] [CrossRef]
- Kumar, S.A.A.; Ovsthus, K.; Kristensen, L.M. An Industrial Perspective on Wireless Sensor Networks—A Survey of Requirements, Protocols, and Challenges. IEEE Commun. Surv. Tutor. 2014, 16, 1391–1412. [Google Scholar] [CrossRef]
- Lai, X.; Ji, X.; Zhou, X.; Chen, L. Energy Efficient Link-Delay Aware Routing in Wireless Sensor Networks. IEEE Sens. J. 2018, 18, 837–848. [Google Scholar] [CrossRef]
- Ma, X.; Luo, W. The Analysis of 6LowPAN Technology. In Proceedings of the 2008 IEEE Pacific-Asia Workshop on Computational Intelligence and Industrial Application, Wuhan, China, 19–20 December 2008; Volume 1, pp. 963–966. [Google Scholar] [CrossRef]
- Javaid, A. Understanding Dijkstra’s Algorithm. Available at SSRN 2340905. 2013. Available online: https://papers.ssrn.com/sol3/papers.cfm?abstract_id=2340905 (accessed on 1 December 2023).
- Guttoski, P.B.; Sunye, M.S.; Silva, F. Kruskal’s Algorithm for Query Tree Optimization. In Proceedings of the 11th International Database Engineering and Applications Symposium (IDEAS 2007), Banff, AB, Canada, 6–8 September 2007; pp. 296–302. [Google Scholar] [CrossRef]
- Al-Karaki, J.; Kamal, A. Routing techniques in wireless sensor networks: A survey. IEEE Wirel. Commun. 2004, 11, 6–28. [Google Scholar] [CrossRef]
- Pedditi, R.B.; Debasis, K. Energy Efficient Routing Protocol for an IoT-Based WSN System to Detect Forest Fires. Appl. Sci. 2023, 13, 3026. [Google Scholar] [CrossRef]
- Tyagi, V.; Singh, S. Network resource management mechanisms in SDN enabled WSNs: A comprehensive review. Comput. Sci. Rev. 2023, 49, 100569. [Google Scholar] [CrossRef]
- Cui, X.; Huang, X.; Ma, Y.; Meng, Q. A Load Balancing Routing Mechanism Based on SDWSN in Smart City. Electronics 2019, 8, 273. [Google Scholar] [CrossRef]
- Orozco-Santos, F.; Sempere-Payá, V.; Albero-Albero, T.; Silvestre-Blanes, J. Enhancing SDN WISE with Slicing Over TSCH. Sensors 2021, 21, 1075. [Google Scholar] [CrossRef] [PubMed]
- Younus, M.U.; Khan, M.K.; Bhatti, A.R. Improving the Software-Defined Wireless Sensor Networks Routing Performance Using Reinforcement Learning. IEEE Internet Things J. 2022, 9, 3495–3508. [Google Scholar] [CrossRef]
- Jlassi, W.; Haddad, R.; Bouallegue, R.; Shubair, R. A Combination of Kruskal and K-means Algorithms for Network Lifetime Extension in Wireless Sensor Networks. In Proceedings of the 2021 International Wireless Communications and Mobile Computing (IWCMC), Harbin City, China, 28 June–2 July 2021; pp. 658–663. [Google Scholar] [CrossRef]
- Duy Tan, N.; Nguyen, D.N.; Hoang, H.N.; Le, T.T.H. EEGT: Energy Efficient Grid-Based Routing Protocol in Wireless Sensor Networks for IoT Applications. Computers 2023, 12, 103. [Google Scholar] [CrossRef]
- Fazio, M.; Buzachis, A.; Galletta, A.; Celesti, A.; Wan, J.; Longo, A.; Villari, M. A Map-Reduce Approach for the Dijkstra Algorithm in SDN Over Osmotic Computing Systems. Int. J. Parallel Program. 2021, 49, 347–375. [Google Scholar] [CrossRef]
- Zhao, J.; Pang, L.; Li, H.; Wang, Z. A Safety-Enhanced Dijkstra Routing Algorithm via SDN Framework. In Proceedings of the 2020 IEEE Fifth International Conference on Data Science in Cyberspace (DSC), Hong Kong, China, 27–30 July 2020; pp. 388–393. [Google Scholar] [CrossRef]
- Abderrahim, M.; Hakim, H.; Boujemaa, H.; Touati, F. A Clustering Routing based on Dijkstra Algorithm for WSNs. In Proceedings of the 2019 19th International Conference on Sciences and Techniques of Automatic Control and Computer Engineering (STA), Sousse, Tunisia, 24–26 March 2019; pp. 605–610. [Google Scholar] [CrossRef]
- Xiang, W.; Wang, N.; Zhou, Y. An Energy-Efficient Routing Algorithm for Software-Defined Wireless Sensor Networks. IEEE Sens. J. 2016, 16, 7393–7400. [Google Scholar] [CrossRef]
- da Silva Santos, L.F.; de Mendonca Júnior, F.F.; Dias, K.L. μSDN: An SDN-Based Routing Architecture for Wireless Sensor Networks. In Proceedings of the 2017 VII Brazilian Symposium on Computing Systems Engineering (SBESC), Curitiba, PR, Brazil, 6–10 November 2017; pp. 63–70. [Google Scholar] [CrossRef]
- Banerjee, A.; Hussain, D.M.A. SD-EAR: Energy Aware Routing in Software Defined Wireless Sensor Networks. Appl. Sci. 2018, 8, 1013. [Google Scholar] [CrossRef]
- Al-Hubaishi, M.; Çeken, C.; Al-Shaikhli, A. A novel energy-aware routing mechanism for SDN-enabled WSAN. Int. J. Commun. Syst. 2019, 32, e3724. [Google Scholar] [CrossRef]
- Criollo, L.; Egas, C.; Tipantuña, C.; Carvajal, J. SDN-Enabled Efficient Default Route Configuration in IEEE 802.15.4 Protocol: Repository of Node Configuration. 2024. Available online: https://github.com/criolloluis410/ATZB-256RFR2-Normal-Node-Configuration (accessed on 18 January 2024).
- Criollo, L.; Egas, C.; Tipantuña, C.; Carvajal, J. SDN-Enabled Efficient Default Route Configuration in IEEE 802.15.4 Protocol: Repository of Controller. 2024. Available online: https://github.com/criolloluis410/Route-Generator-Aplication (accessed on 18 January 2024).


























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Ref | Year | Description | Network Layer Protocol | Link Layer Protocol | Hardware/Bits | Simulation | Implemented Algortihm |
|---|---|---|---|---|---|---|---|
| [26] | 2016 | Energy-efficient routing algorithm for SDWSNs | Not reported | Not reported | No implemented | Yes | NWPSO |
| [27] | 2017 | -SDN | 6LowPAN | 802.15.4 | ARM920T/32 | Implementation | AODV, LQRP routing protocols |
| [28] | 2018 | Software-defined energy aware routing SD-EAR | Not reported | Not reported | No implemented | Yes | based on sleep request—sleep grant mechanism |
| [29] | 2018 | SDWSN-architecture | Not reported | Not reported | No implemented | Yes | Dijkstra |
| [25] | 2019 | Clustering Routing based on Dijkstra algorithm for WSNs | Not reported | Not reported | No implemented | Yes | Dijkstra |
| [21] | 2021 | Kruskal-based SDWSN | Not reported | Not reported | No implemented | Yes | Kruskal |
| [20] | 2022 | RL-Based on SDWSN | IP | 802.11,STP | Raspberry Pi/64 | Implementation | Kruskal, Dijkstra |
| Our Work | 2024 | Routing proposal for SDWSN | Not used | 802.15.4 | RCB256RFR2/8 | No | Kruskal, Dijkstra |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Egas Acosta, C.; Criollo, L.; Tipantuña, C.; Carvajal-Rodriguez, J. Software-Defined Networking-Enabled Efficient Default Route Configuration in IEEE 802.15.4 Protocol: A Smart Algorithmic Approach. Electronics 2024, 13, 1537. https://doi.org/10.3390/electronics13081537
Egas Acosta C, Criollo L, Tipantuña C, Carvajal-Rodriguez J. Software-Defined Networking-Enabled Efficient Default Route Configuration in IEEE 802.15.4 Protocol: A Smart Algorithmic Approach. Electronics. 2024; 13(8):1537. https://doi.org/10.3390/electronics13081537
Chicago/Turabian StyleEgas Acosta, Carlos, Luis Criollo, Christian Tipantuña, and Jorge Carvajal-Rodriguez. 2024. "Software-Defined Networking-Enabled Efficient Default Route Configuration in IEEE 802.15.4 Protocol: A Smart Algorithmic Approach" Electronics 13, no. 8: 1537. https://doi.org/10.3390/electronics13081537
APA StyleEgas Acosta, C., Criollo, L., Tipantuña, C., & Carvajal-Rodriguez, J. (2024). Software-Defined Networking-Enabled Efficient Default Route Configuration in IEEE 802.15.4 Protocol: A Smart Algorithmic Approach. Electronics, 13(8), 1537. https://doi.org/10.3390/electronics13081537