1. Introduction
Spraying robots are widely used automation devices in the industrial sector [
1,
2]. They are capable of performing coating tasks on surfaces of automobiles, aircraft, spacecraft, and other structures with high speed and precision [
3,
4,
5,
6]. In comparison to manual spraying, these robots possess faster operation speeds and higher stability, while also being adaptable to various intricate shapes. Therefore, they can significantly enhance production efficiency and product quality [
7].
The quality of surface coatings directly affects product performance. Maintaining stable speed control is crucial for achieving high-quality coatings. When the spraying speed of a spraying robot is too slow, it leads to an insufficient curing of the coating, causing bubbles and wrinkles. Conversely, an excessive spraying speed makes the coating’s quality fragile. Therefore, spraying robots need to possess not only high-precision position control capabilities but also ensure that speed control is highly accurate and stable. High-DOF robotic arms can cover a wide range of workspaces, adapt to various scales and sizes of working environments, and achieve precise motion control. Therefore, high-DOF robotic arms are widely applied in the field of spraying robots [
8,
9,
10].
Proportional-integral-derivative (PID) control is the most common controller in the field of industrial robots. However, for robot systems with significant gravity effects such as spraying robots, PID control can lead to the presence of steady-state errors [
11]. According to Arimoto S et al., by selecting appropriate proportional-integral-derivative gains, it is possible to achieve asymptotic stable set-point control within a local range [
12]. To overcome the influence of steady-state errors as much as possible, scholars have proposed control schemes such as nonlinear PID [
13], fuzzy PID [
14], and neural network PID [
15]. However, the aforementioned control strategies have not fully utilized the dynamic model, making it difficult to meet the demand for stable speed control. The spraying robot system is highly complex, exhibiting characteristics of strong nonlinearity, time-varying characteristics, and strong coupling. Particularly during high-speed motion, the robot’s inertia undergoes significant changes, leading to a pronounced increase in nonlinear effects. As a result, these control strategies are prone to causing control instability and system oscillations [
16].
Control methods based on the robot’s dynamic model are widely regarded as the most effective approach to enhancing robot dynamic characteristics and trajectory tracking accuracy. Currently, scholars have proposed various advanced control schemes that integrate dynamic characteristics of industrial robots [
17,
18,
19,
20,
21]. However, these strategies still face challenges in spraying robots due to computational efficiency limitations. Currently, incorporating dynamic feedforward into closed-loop feedback control schemes remains the mainstream approach in the industrial sector [
22,
23]. In this control scheme, the feedforward component is utilized to compensate for dynamic characteristics, while the feedback component is further finely adjusted based on control errors to maintain system stability. In related research, Santibanez et al. demonstrated that appropriate gains can ensure global asymptotic stability [
24]. Caccavale et al. conducted studies on dynamic parameter identification and feedforward control for robots [
25]. Abe et al. conducted research on feedforward control for flexible dual-arm robots [
26].
Currently, research on spraying robots primarily focuses on two aspects: firstly, how to incorporate dynamic models, and secondly, addressing the uncertainty of dynamic parameters. Regarding the first aspect, Zhang Binbin et al. proposed a method for achieving the precise dynamic feedforward control of spraying robots in large workspaces and under time-varying dynamic conditions [
27]. Yu Chen et al. proposed a nonlinear adaptive robust control scheme based on desired trajectory [
28]. Zilin Liu et al. proposed a strategy for tuning control parameters for spraying robots based on small noise excitation [
29]. The aforementioned strategies all require physical information of the robot system (such as joint masses, centers of mass, and moments of inertia), and the process of tuning control system parameters is both intricate and time consuming.
Regarding the second aspect, Yi-Liang Yeh proposed a robust noise-free linear control scheme for robot manipulator [
30]. Han Zhao et al. introduced an adaptive robust constrained control scheme for bicycle robots under uncertainties [
31]. Liu et al. established a friction model for spraying robots and devised an outer-loop adaptive control scheme [
32]. Zhong Wang et al. proposed an active disturbance rejection controller based on an extended state observer and designed a feedforward control strategy with deviation compensation [
33]. Xin Cheng et al. proposed a dynamic feedforward-based active disturbance rejection control strategy to overcome uncertainties and disturbances [
34]. However, these control methods all require real-time parameter adjustments within the control system, which compromises control performance.
To overcome the above challenges, this paper proposes a method to linearize the dynamic model into feedforward coefficients and provides a technique to adjust various control parameters of the system. The main contributions of this paper can be summarized as follows:
This control strategy translates the dynamic model into feedforward coefficients within the control system, effectively transforming complex dynamic characteristics into a parameter tuning problem, thus improving the response speed of the control system.
The control parameters of this strategy can be roughly determined, reducing the laborious debugging work typically required by engineers.
When determining the feedforward coefficients, this control strategy only requires current measurements, eliminating the need for various detailed system information such as dynamic parameters and gearbox damping ratios.
The structure of this paper is as follows:
Section 2 deduces the linearization method for robot dynamics.
Section 3 presents the design methodology of the control system.
Section 4 describes the approach for determining the control coefficients of the system.
Section 5 provides a detailed presentation of the experimental results.
Section 6 presents the discussion and
Section 7 presents the conclusion.
2. Dynamic Linearization
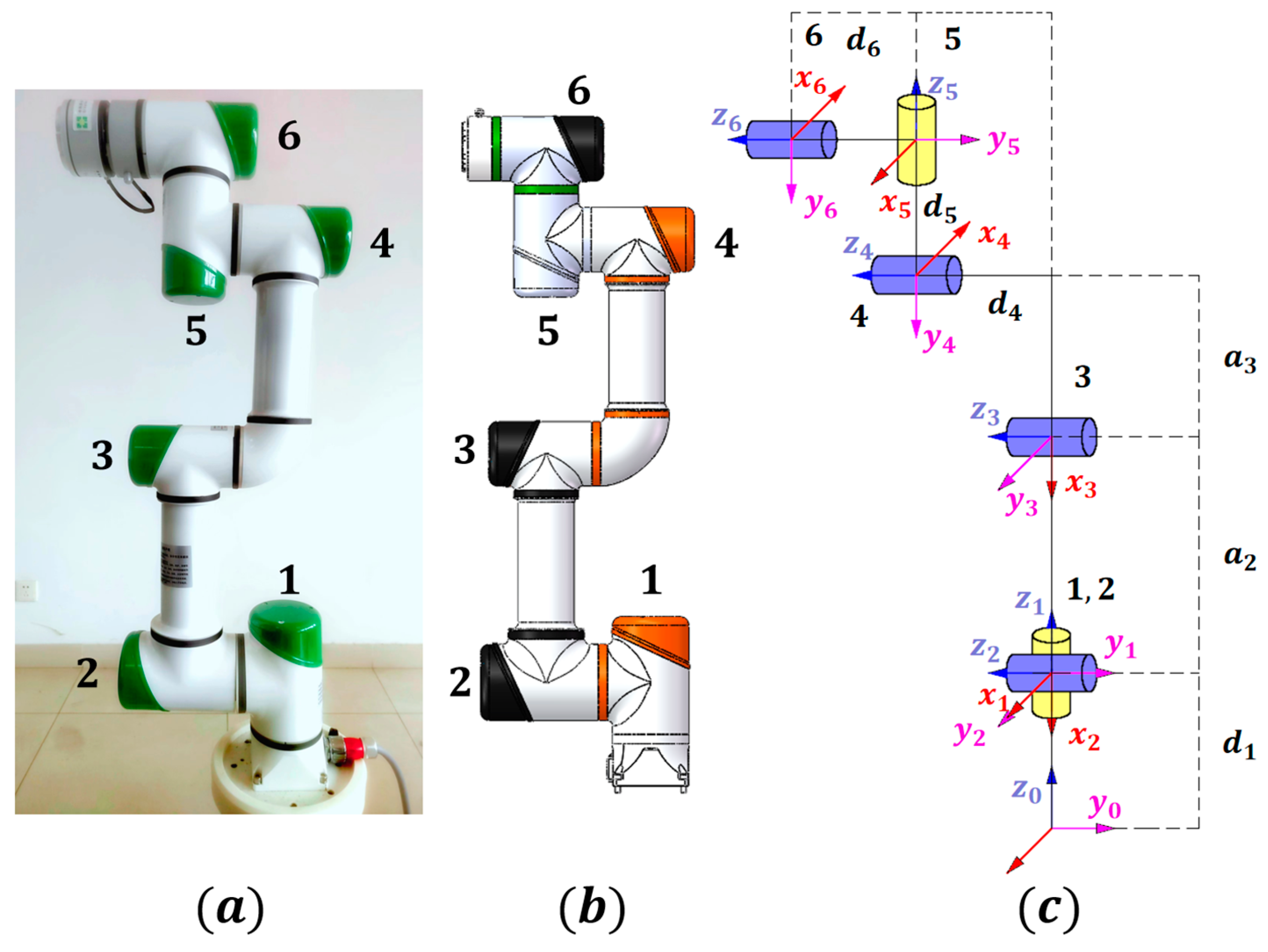
In industrial applications,
n-DOF manipulators are commonly used as the platforms for spraying robots. Therefore, the focus of this paper is primarily on such manipulators. The position of robot joint
is determined by a series of preceding joint rotation angles
[
35], where
. Therefore, the center of mass positions
for each joint can be expressed as functions of
, and the potential energy of the system, denoted as
P, can be represented as (1):
where
is the component of
along the axis opposite to gravity,
represents the mass of joint
. The total kinetic energy
K of the system is composed of three parts: the translational kinetic energy of each joint
K1, the rotational kinetic energy of each joint
K2, and the rotational kinetic energy of each drive motor
K3. The center of mass velocity
for each joint can be expressed as (2):
The total kinetic energy
K of the system can be expressed as
where
is the inertia tensor matrix of joint
.
represents the angular velocity of joint
, which is determined by
and
, and can be solved using the Newton–Euler method.
denotes the rotational inertia of the drive motor for joint
.
k stands for the damping ratio.
By substituting (1) and (3) into the Lagrange’s equation, where
, we can derive the driving torques for each motor
:
Since
is a function of both
and
, its derivative with respect to time
t can be divided into two parts, as shown in (5):
Substituting Equation (5) into Equation (4), we obtain
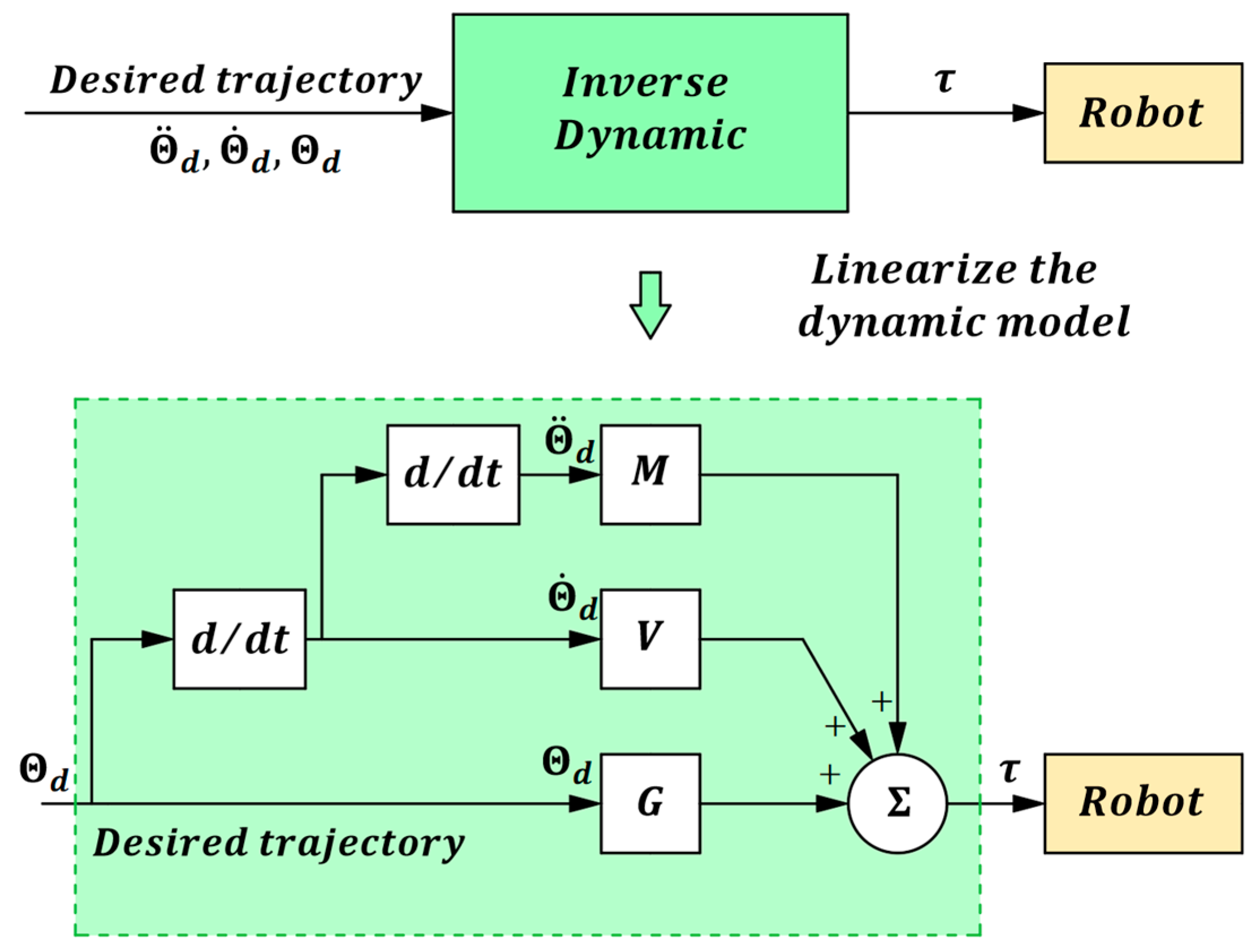
We linearize Equation (6) as shown in Equation (7):
where
and
are the generalized inverses of
and
, respectively, and
M represents the acceleration gain diagonal matrix, and
.
V is the velocity gain diagonal matrix, and
.
G stands for the position gain diagonal matrix, and
. Through this linearization approach, we can transform dynamical models with nonlinear and strongly coupled characteristics into feedforward coefficients, thereby enhancing the system’s response speed. The process of linearizing the robot’s dynamic model is illustrated in
Figure 1.
4. Determination of Control System Parameters
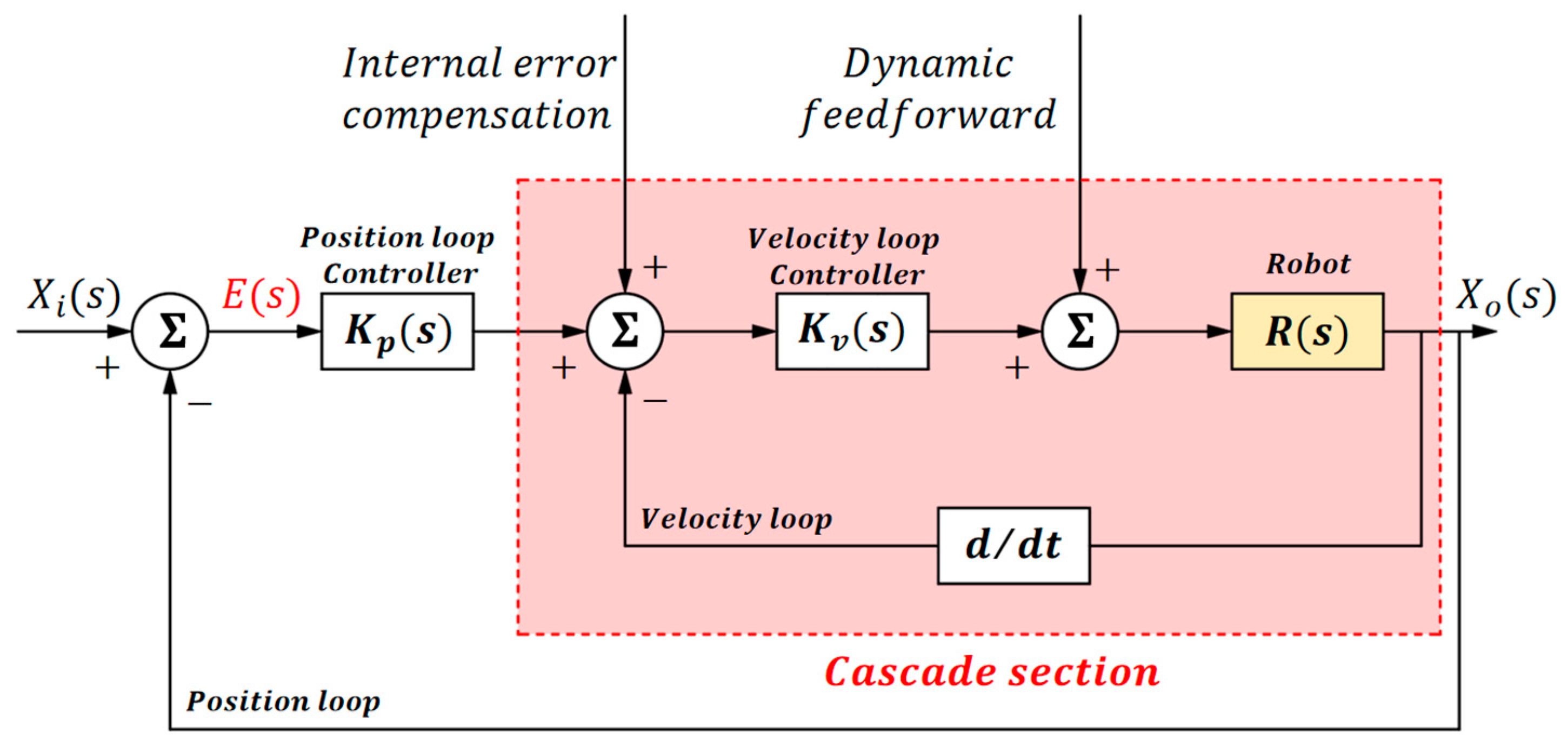
Since the feedforward section does not affect the system’s stability, we can independently design the system’s feedforward and feedback coefficients. The control precision of a control system is primarily determined by the dynamic model. Therefore, the emphasis of this section is on determining the feedforward coefficients, and there is no need to spend too much time on determining the feedback coefficients.
4.1. Determination of Feedback Coefficients
Feedback coefficients include
,
, and
T. According to the analysis in
Section 3, it is known that the position loop coefficient
is determined by the integral time
T, and the velocity loop coefficient
needs to be much greater than 1. They satisfy the relationship of
and
. Therefore, it is only necessary to determine the integral time
T and velocity loop coefficient
for each joint.
For , as the velocity inner loop serves only for preliminary adjustment, we can initially set the velocity loop proportional coefficients for each joint roughly, and then fine-tune the control system with the outer position loop for precision adjustment. In this paper, the proportional coefficients for the velocity loop of each joint are set to 100.
For
, the integral time for each joint can be determined using the Ziegler–Nichols method [
36]. We place the robot’s closed-loop system in an unloaded state, record the period of current oscillations, and initially set the integral time constant
T to this oscillation period. Subsequently, we iteratively adjust the time constant
T repeatedly to achieve optimal performance. The feedback coefficients for each joint are shown in
Table 1.
4.2. Determination of Dynamic Feedforward Coefficients
Feedforward coefficients include
,
, and
. For different task trajectories, it is necessary to identify different feedforward coefficients. The process of determining the feedforward parameters for each joint is illustrated in
Figure 6.
We pre-run the task trajectory using a PID control scheme, where the proportional coefficient and integral time constant T in the PID strategy can be consistent with the previously determined feedback coefficients. We record the current values of each drive motor corresponding to the task trajectory, and then filter the current to remove noise interference as much as possible. The filtered current values are denoted as . These current values can be approximated as the actual current required by each motor drive.
To make the linearized dynamic feedforward as closely as possible consistent with the real robot dynamics, we aim for the current values
provided by the dynamic feedforward in the control system to be as equal as possible to the actual current values
required by the robot’s individual drive motors. The approach used in this paper is independent joint control, where the dynamic parameters of each joint are identified separately. From (7), it can be seen that the feedforward coefficients for each joint, denoted as
,
,
, determine the current values
provided by the dynamic feedforward, taking joint
i as an example, as illustrated in (13):
To make the dynamic feedforward as closely aligned with the real current values as possible, we can adjust the feedforward coefficients
,
,
to ensure that
closely matches
. The process of adjusting these parameters can be formulated as an optimization problem. The optimization objective
is as depicted in (14), and is further illustrated in
Figure 7 where
k represents the number of points for collecting current, and the design variables are
,
,
.
4.3. Solving the Optimization Problem
This paper employs the particle swarm optimization (PSO) algorithm to solve the optimization problem. PSO is an optimization algorithm based on swarm intelligence, where candidate solutions are treated as particles. Each particle continuously adjusts its position in the solution space based on its individual best and the global best, aiming to find the optimal solution. This algorithm is capable of rapidly searching for an approximate optimal solution to the objective function.
The PSO algorithm has advantages such as simplicity and ease of implementation. Compared to traditional optimization algorithms, it does not require gradient information of the objective function; compared to modern intelligent algorithms such as genetic algorithms, it does not require complex operations like crossover and mutation. For unconstrained optimization problems with a large search space like those in this paper, using the PSO algorithm enables a parallel search, facilitating the rapid and efficient discovery of the optimal solution.
The feedforward coefficients, namely
,
, and
are treated as particles. Each particle
i possesses position
and velocity
attributes, and the corresponding fitness function is denoted as
, where position
represents the solution to the problem, and
represents the direction of solution updating. Particles update themselves by tracking two positions: one is the best position
that particle
i has experienced so far, and the other is the best position
that the particles in the population have collectively achieved. The particles update their velocity and position based on Equations (15) and (16):
where
are all weighting coefficients, while
are random values between
.
represents the particle’s update in the direction of individual best, and
represents the particle’s update in the direction of global best.
This paper utilizes the PSO algorithm, setting the number of iterations
s to 200. Throughout the entire iteration process, the position
of the particle with the minimum fitness
is selected as the feedforward coefficient. The feedforward coefficients identified for the two task trajectories in this paper are shown in
Table 2 and
Table 3. When the task trajectory is high-speed back-and-forth linear movements, the current fitting results for joints 1 to 4 are shown in
Figure 8. Using this approach, we simplify the complex dynamic model into an adjustment process for feedforward parameters. Importantly, this process does not require knowledge of the physical characteristics of each robot joint (such as mass, center of mass, moment of inertia) or details like friction coefficients, gearbox damping ratios, and other information. Additionally, because we can calculate the dynamic parameters offline, avoiding real-time computations required by other methods, it enhances the universality of our approach.
6. Discussion
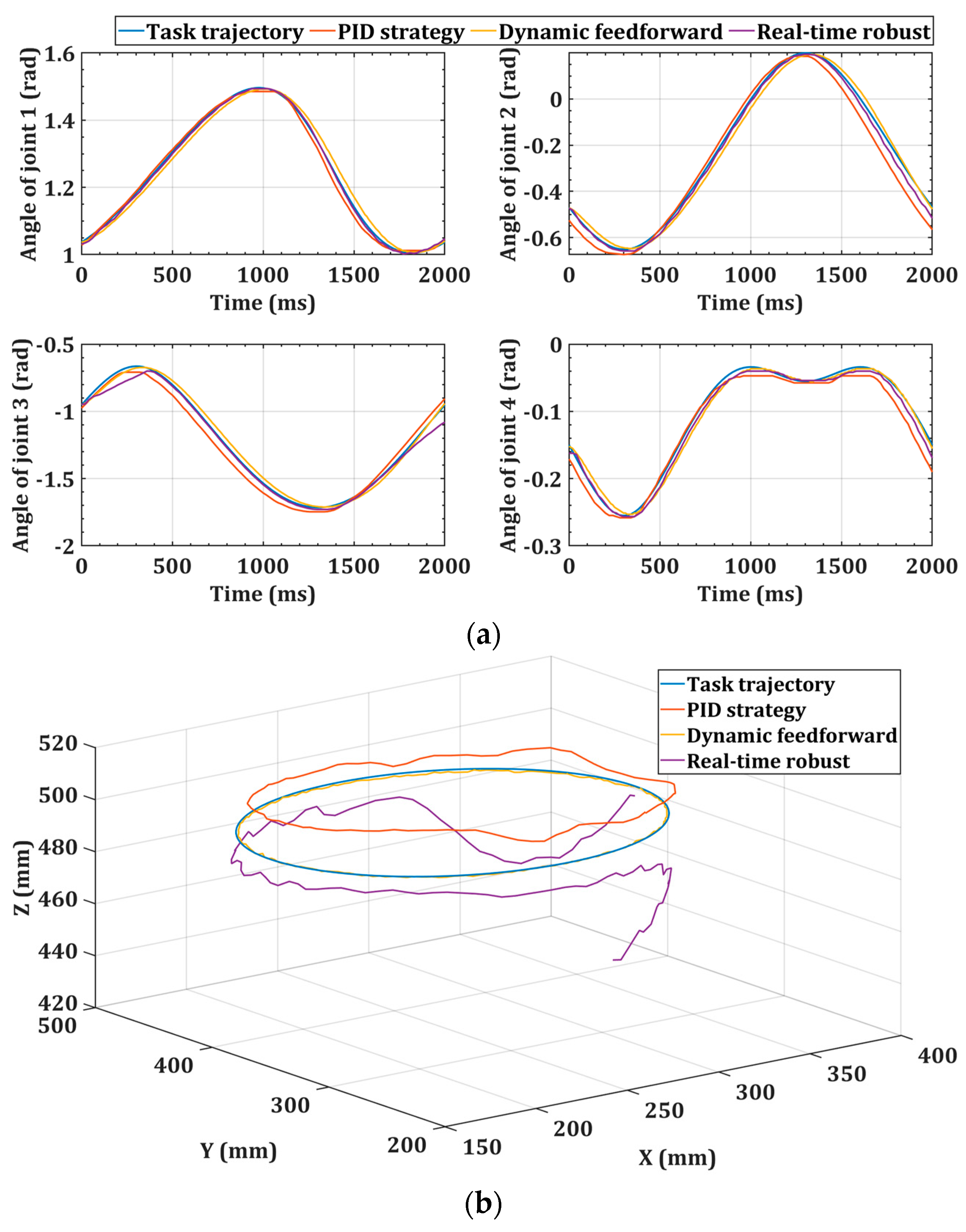
We employed three different control strategies, namely, a PID strategy, a dynamic feedforward strategy, and a real-time robust control strategy. From
Table 5 and
Table 7, it can be seen that our method outperforms the other two methods in terms of joint tracking performance. To analyze the positional and velocity accuracies of these three methods in Cartesian space, we have compiled
Table 6 and
Table 8 into
Table 9 and
Table 10.
In terms of positional accuracy, for the linear trajectory, the average position error of the dynamic feedforward strategy is only 5.90 mm, which represents an increase in accuracy of 62.5% compared to the PID strategy used for identification. For the circular trajectory, the average position error of the dynamic feedforward strategy is 2.67 mm, which represents an increase in accuracy of 92.2% compared to the PID strategy. This indicates that the integration of dynamic feedforward enables the system to respond proactively, reducing the burden on the feedback loop, and thereby significantly enhancing the positional tracking precision.
In terms of velocity accuracy, for the linear trajectories, the average error of the dynamic feedforward strategy is only 0.003 mm/s, representing an increase in accuracy of 88.9% compared to the PID strategy. For the circular trajectory, the average position error of the dynamic feedforward strategy is 0.001 mm/s, indicating an improvement in accuracy of 91.6% compared to the PID strategy. This indicates that the dual-loop control system employed in this paper can effectively adjust velocity errors, thereby ensuring velocity stability.
Based on the above experiments, it is evident that when applying different high-speed reference trajectories, the use of a dynamic feedforward control strategy results in significantly lower errors across all aspects compared to employing the pure PID control strategy. This outcome strongly validates the effectiveness of our approach.
7. Conclusions
The control precision of spraying robots determines the quality of the coating, with the dynamic characteristics significantly influencing the control performance of the robot. This paper proposes a control strategy based on a dynamic feedforward strategy for spraying robots and provides a method for determining various control parameters within the system. We have validated our method through both simulation and physical experiments. Experimental results demonstrate that this control strategy achieves excellent tracking performance for various high-speed reference trajectories, with a significantly higher tracking accuracy compared to control strategies that do not employ dynamic feedforward. The main advantages of our approach in this paper are as follows:
The control strategy proposed in this paper converts complex dynamic models into feedforward coefficients for the control system, thus enhancing the real-time performance of the control system.
This paper presents a method for determining control parameters, avoiding the time-consuming and labor-intensive process of tuning.
The control strategy proposed in this paper only requires measuring current to determine the feedforward coefficients, without the need for any additional information.
However, our method still has the following limitations:
The industrial system needs to have the capability to measure control signals.
Only one task trajectory can be identified at a time, and whenever a new task trajectory is introduced, the dynamic parameters need to be reidentified.
In our future work, we plan to integrate this method with iterative learning control to make the dynamic feedforward coefficients more precise. Additionally, we intend to combine it with optimal control to enhance the system’s dynamic responsiveness for superior performance.
























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}