Path Planning for Mobile Agents Using a Genetic Algorithm with a Direction Guided Factor


Abstract
:
1. Introduction
2. Literature Review
3. Demonstration of Problem
4. Modelling Methodology to Generate Feasible Paths
4.1. Selection of Effective Free Cells
4.2. Direction-Based Free Cell Search
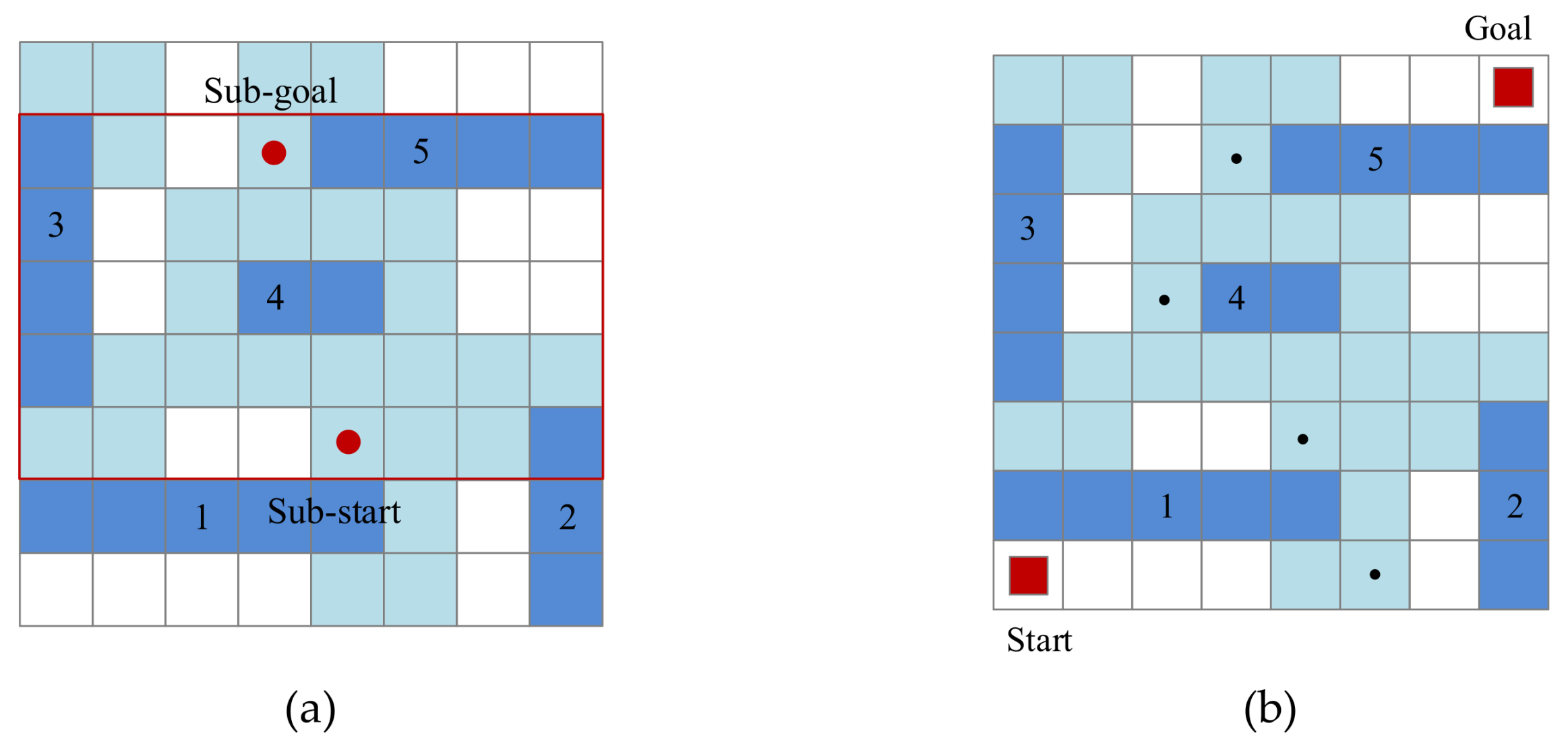
4.3. Steps to Generate Feasible Paths
- Step 0. Initialize the environment.
- Step 1. Check the current position to determine whether it is adjacent to any obstacles. If so, let the adjacent obstacle select any random effective free cell adjacent to obstacle i and update the current position to cell . If the current position is not adjacent to any obstacles, do not update the current position.
- Step 2. Deduce the moving direction from the current position to the goal position and move in that direction.
- Step 3. If an MA does not collide with any obstacles other than obstacle , connect the current position and goal position, and stop the algorithm. If an MA collides with an obstacle, set sub-start to current position and sub-goal to current destination. After this, continue to Step 4.
- Step 4. Let the obstacle the MA collides with first, be obstacle . Check whether any effective free cells adjacent to obstacle are linked to the current position. If so, continue to Step 5. If not, create a recursive function in which the goal point is set to a random effective free cell adjacent to obstacle considering direction factor, and go to Step 1.
- Step 5. The MA moves to a random effective free cell, , adjacent to obstacle and update the current position to cell .
- Step 6. Repeat Steps 1 to 5 until the MA reaches the goal point.
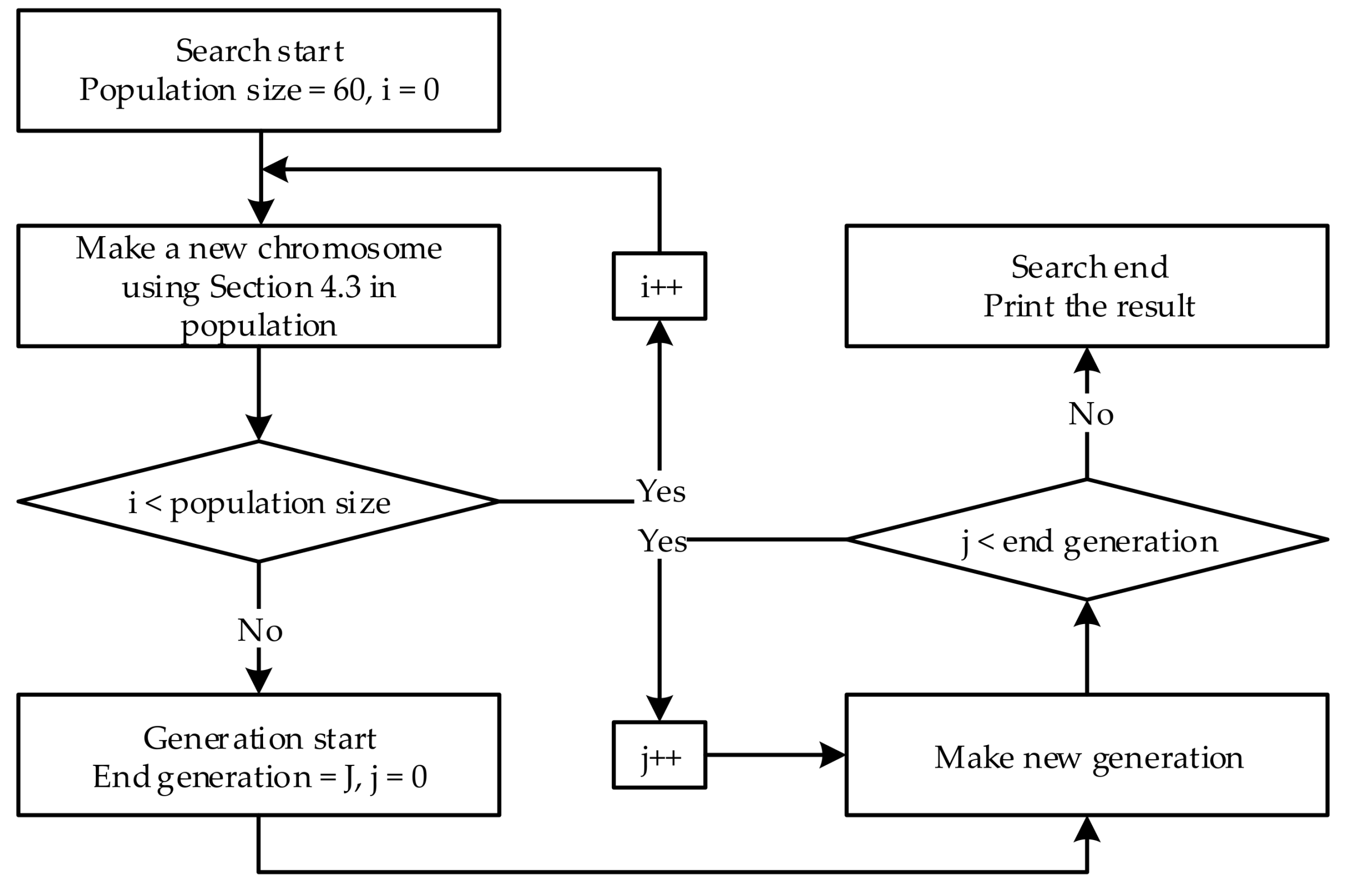
5. Genetic Algorithm
5.1. GA Model
5.2. Chromosome Reproduction
5.3. Crossover
5.4. Mutation
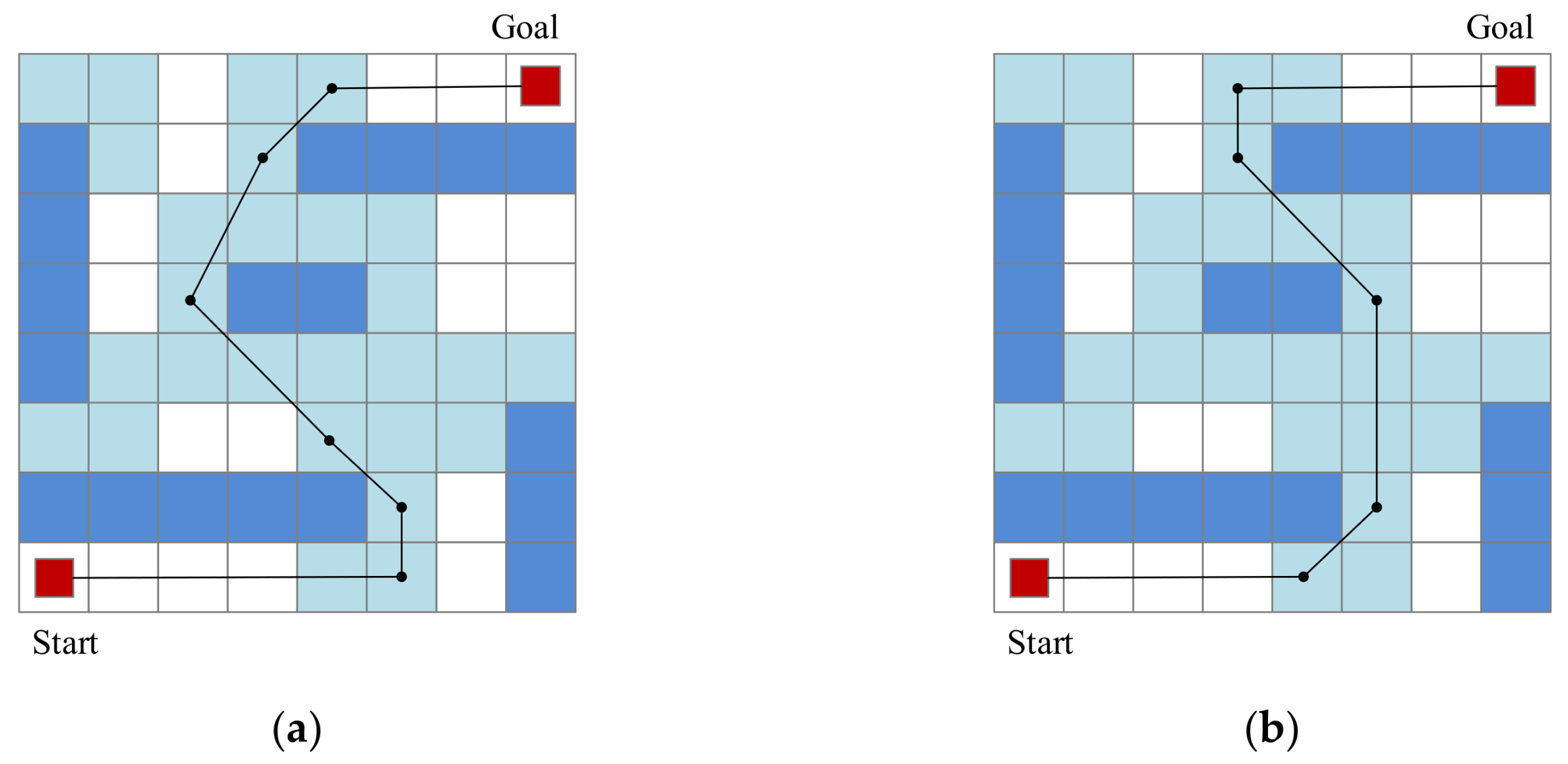
6. Experimental Results
7. Conclusions
Author Contributions
Funding
Conflicts of Interest
Appendix A. Dynamic Environment


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Environment Name | Item | Li et al. [13] | Tuncer and Yildirim [15] | This Study |
|---|---|---|---|---|
| Original E1 | fitness value (average) | 29.25 | 27.82 | 27.22 |
| CPU time (s) (average) | 0.31 | 0.89 | 0.16 | |
| best fitness value | 27.22 | - | 27.22 | |
| Changed E1 | fitness value (average) | 31.21 | 29.08 | 28.67 |
| CPU time (s) (average) | 0.26 | 0.86 | 0.10 | |
| best fitness value | 28.73 | - | 28.65 |
References
- Banker, S. Robots In The Warehouse: It’s Not Just Amazon. Forbes. 2016. Available online: https://www.forbes.com/sites/stevebanker/2016/01/11/robots-in-the-warehouse-its-not-just-amazon/#49c4019840b8 (accessed on 20 July 2017).
- Amazon makes first drone delivery. BBC. 2016. Available online: https://www.bbc.com/news/technology-38320067 (accessed on 15 August 2017).
- Siegwart, R.; Nourbakhsh, I.R.; Scaramuzza, D. Introduction to Autonomous Mobile Robots; MIT Press: Cambridge, MA, USA, 2011. [Google Scholar]
- Van Den Berg, J.; Ferguson, D.; Kuffner, J. Anytime path planning and replanning in dynamic environments. In Proceedings of the IEEE International Conference on Robotics and Automation, Orlando, FL, USA, 15–19 May 2006; pp. 2366–2371. [Google Scholar] [CrossRef]
- Mac, T.T.; Copot, C.; Tran, D.T.; De Keyser, R. Heuristic approaches in robot path planning: A survey. Robot. Auton. Syst. 2016, 86, 13–28. [Google Scholar] [CrossRef]
- Gao, M.; Xu, J.; Tian, J.; Wu, H. Path Planning for Mobile Robot Based on Chaos Genetic Algorithm. In Proceedings of the 2008 Fourth International Conference on Natural Computation, Jinan, China, 18–20 October 2008; pp. 409–413. [Google Scholar] [CrossRef]
- Gemeinder, M.; Gerke, M. GA-based path planning for mobile robot systems employing an active search algorithm. Appl. Soft Comput. 2003, 3, 149–158. [Google Scholar] [CrossRef]
- Sugihara, K.; Smith, J. Genetic Algorithms for Adaptive Motion Planning of an Autonomous Mobile Robot. In Proceedings of the 1997 IEEE International Symposium on Computational Intelligence in Robotics and Automation, Monterey, CA, USA, 10–11 July 1997; pp. 138–143. [Google Scholar] [CrossRef]
- Daniel, K.; Nash, A.; Koenig, S.; Felner, A. Theta *: Any-Angle Path Planning on Grids. J. Artif. Intell. Res. 2010, 39, 533–579. [Google Scholar] [CrossRef]
- Hu, Y.; Yang, S.X. A knowledge based genetic algorithm for path planning of a mobile robot. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA’04), New Orleans, LA, USA, 26 April–1 May 2004; Volume 5, pp. 4350–4355. [Google Scholar] [CrossRef]
- Huang, H.; Tsai, C. Global path planning for autonomous robot navigation using hybrid metaheuristic GA-PSO algorithm. In Proceedings of the SICE Annual Conference (SICE), Tokyo, Japan, 13–18 September 2011; pp. 1338–1343. [Google Scholar]
- Karami, A.H.; Hasanzadeh, M. An adaptive genetic algorithm for robot motion planning in 2D complex environments. Comput. Electr. Eng. 2015, 43, 317–329. [Google Scholar] [CrossRef]
- Li, Q.; Zhang, W.; Yin, Y.; Wang, Z.; Liu, G. An Improved Genetic Algorithm of Optimum Path Planning for Mobile Robots. In Proceedings of the Sixth International Conference on Intelligent Systems Design and Applications, Jinan, China, 16–18 October 2006; Volume 2, pp. 637–642. [Google Scholar] [CrossRef]
- Sedighi, K.H.; Ashenayi, K.; Manikas, T.W.; Wainwright, R.L.; Tai, H. Autonomous Local Path Planning for a Mobile Robot Using a Genetic Algorithm. Electr. Eng. 2004, 1338–1345. [Google Scholar] [CrossRef]
- Tuncer, A.; Yildirim, M. Dynamic path planning of mobile robots with improved genetic algorithm. Comput. Electr. Eng. 2012, 38, 1564–1572. [Google Scholar] [CrossRef]
- Frontzek, T.; Goerke, N.; Eckmiller, R. Flexible Path Peal-Time Applications Using A*-Method and Neural RBF-Networks. In Proceedings of the 1998 IEEE International Conference on Robotics and Automation, Leuven, Belgium, 16–20 May 1998; pp. 1417–1422. [Google Scholar]
- Juidette, H.; Youlal, H. Fuzzy dynamic path planning using genetic algorithm. Electron. Lett. 2000, 36, 374–376. [Google Scholar]
- Miao, H.; Tian, Y.-C. Dynamic robot path planning using an enhanced simulated annealing approach. Appl. Math. Comput. 2013, 222, 420–437. [Google Scholar] [CrossRef] [Green Version]
- Khatib, O. Real-time obstacle avoidance for manipulators and mobile robots. Int. J. Robot. Res. 1986, 5, 396–404. [Google Scholar] [CrossRef]
- Wang, C.; Soh, Y.C.; Wang, H.; Wang, H. A hierarchical genetic algorithm for path planning in a static environment with obstacles. In Proceedings of the Canadian Conference on Electrical and Computer Engineering (IEEE CCECE 2002), Winnipeg, MB, Canada, 12–15 May 2002; pp. 1652–1657. [Google Scholar]
- Lozano-Pérez, T.; Wesley, M.A. An algorithm for planning collision-free paths among polyhedral obstacles. Commun. ACM 1979, 22, 560–570. [Google Scholar] [CrossRef]
- Rashid, A.T.; Ali, A.A.; Frasca, M.; Fortuna, L. Path planning with obstacle avoidance based on visibility binary tree algorithm. Robot. Auton. Syst. 2013, 61, 1440–1449. [Google Scholar] [CrossRef]
- Janson, L.; Ichter, B.; Pavone, M. Deterministic sampling-based motion planning: Optimality, complexity, and performance. Int. J. Robot. Res. 2018, 37, 46–61. [Google Scholar] [CrossRef]
- Lin, Y.; Saripalli, S. Sampling-Based Path Planning for UAV Collision Avoidance. IEEE Trans. Intell. Transp. Syst. 2017, 18, 3179–3192. [Google Scholar] [CrossRef]
- Wei, K.; Ren, B. A Method on Dynamic Path Planning for Robotic Manipulator Autonomous Obstacle Avoidance Based on an Improved RRT Algorithm. Sensors 2018, 18, 571. [Google Scholar] [CrossRef] [PubMed]
- Aguilar, W.G.; Morales, S.G. 3D Environment Mapping Using the Kinect V2 and Path Planning Based on RRT Algorithms. Electronics 2016, 5, 70. [Google Scholar] [CrossRef]
- Mohanty, P.K.; Parhi, D.R. Optimal path planning for a mobile robot using cuckoo search algorithm. J. Exp. Theor. Artif. Intell. 2016, 28, 35–52. [Google Scholar] [CrossRef]
- Englot, B.; Hover, F. Multi-goal feasible path planning using ant colony optimization. In Proceedings of the 2011 IEEE International Conference on Robotics and Automation, Shanghai, China, 9–13 May 2011; pp. 2255–2260. [Google Scholar] [CrossRef]
- Wang, X.; Xue, L.; Yan, Y.; Gu, X. Welding Robot Collision-Free Path Optimization. Appl. Sci. 2017, 7, 89. [Google Scholar] [CrossRef]
- Raja, P. Optimal path planning of mobile robots: A review. Int. J. Phys. Sci. 2012, 7, 1314–1320. [Google Scholar] [CrossRef]
- Karaman, S.; Frazzoli, E. Sampling-based algorithms for optimal motion planning. Int. J. Robot. Res. 2011, 30, 846–894. [Google Scholar] [CrossRef] [Green Version]
- Roberge, V.; Tarbouchi, M.; Labonte, G. Comparison of parallel genetic algorithm and particle swarm optimization for real-time UAV path planning. IEEE Trans. Ind. Inform. 2013, 9, 132–141. [Google Scholar] [CrossRef]
- Bottasso, C.L.; Leonello, D.; Savini, B. Path planning for autonomous vehicles by trajectory smoothing using motion primitives. IEEE Trans. Control Syst. Technol. 2008, 16, 1152–1168. [Google Scholar] [CrossRef]
- Scheuer, A.; Fraichard, T. Continuous-curvature path planning for car-like vehicles. In Proceedings of the 1997 IEEE/RSJ International Conference on Intelligent Robot and Systems. Innovative Robotics for Real-World Applications (IROS ’97), Grenoble, France, 11 September 1997; Volume 2, pp. 997–1003. [Google Scholar] [CrossRef]
- Tsai, C.-C.; Huang, H.-C.; Chan, C.-K. Parallel Elite Genetic Algorithm and Its Application to Global Path Planning for Autonomous Robot Navigation. IEEE Trans. Ind. Electron. 2011, 58, 4813–4821. [Google Scholar] [CrossRef]
- De Boor, C. On calculating with B-splines. J. Approx. Theory 1972, 6, 50–62. [Google Scholar] [CrossRef]
- Cox, M.G. The numerical evaluation of B-splines. IMA J. Appl. Math. 1972, 10, 134–149. [Google Scholar] [CrossRef]
- Jia, D.; Vagners, J. Parallel evolutionary algorithms for UAV path planning. In Proceedings of the AIAA 1st Intelligent Systems Technical Conference, Chicago, IL, USA, 20–22 September 2004. [Google Scholar] [CrossRef]
























| Study | Fitness Value (Average) | CPU Time (s) (Average) | Best Fitness Value |
|---|---|---|---|
| Li et al. [13] | 31.21 | 0.26 | 28.73 |
| Tuncer and Yildirim [15] | 29.08 | 0.86 | - |
| Karami and Hasanzadeh [12] | - | 3.47 | 28.87 |
| This study | 28.67 | 0.10 | 28.65 |
| Study | Fitness Value (Average) | CPU Time (s) (Average) | Best Fitness Value |
|---|---|---|---|
| Li et al. [13] | 25.17 | 0.34 | - |
| Tuncer and Yildirim [15] | 24.71 | 0.69 | - |
| Karami and Hasanzadeh [12] | - | 3.62 | 23.59 |
| This study | 23.46 | 0.13 | 22.84 |
| Time (s) | E1 | E2 | ||
|---|---|---|---|---|
| Average | Deviation | Average | Deviation | |
| initial fitness | 42.27114 30.32668 | 1.587456 1.040444 | 44.01728 26.92745 | 4.493747 1.952633 |
| 0.01 | ||||
| 0.05 | 28.75185 | 0.016225 | 24.85468 | 0.355333 |
| 0.1 | 28.72511 | 0.007467 | 24.06891 | 0.265282 |
| 0.2 | 28.69232 | 0.004177 | 23.98146 | 0.211417 |
| 0.5 | 28.67255 | 0.001941 | 23.51231 | 0.153957 |
| Attribute | E1 | E2 |
|---|---|---|
| # of total cells | 256 | |
| # of obstacles | 7 | 10 |
| # of blocked cells | 65 | 98 |
| # of free cells | 189 | 156 |
| # of selectable cells in random selection | 189 | 156 |
| # of selectable cells in this study | 24 | 55 |
| Environment # | Fitness Value (Average) | CPU Time (s) (Average) | Best Fitness Value |
|---|---|---|---|
| E3 | 43.84 | 1.17 | 42.95 |
| E4 | 52.06 | 0.67 | 50.49 |
| E5 | 46.82 | 1.87 | 45.52 |
| Times (s) | E3 | E4 | E5 |
|---|---|---|---|
| initial fitness | 83.26 | 134.6274 | 210.25 |
| 0.01 | 56.38 | 66.30 | 91.67 |
| 0.05 | 45.09 | 56.44 | 50.35 |
| 0.1 | 44.64 | 54.64 | 48.96 |
| 0.2 | 44.36 | 53.22 | 48.02 |
| 0.5 | 44.12 | 52.14 | 47.69 |
| 1 | 43.79 | 51.85 | 47.10 |
| 2 | 43.67 | 51.77 | 46.68 |
| 3 | 43.53 | 51.83 | 46.53 |
| Environment # | E1 | E2 | E3 | E4 | E5 |
|---|---|---|---|---|---|
| # of total cells | 256 | 256 | 900 | 900 | 900 |
| # of obstacles | 7 | 10 | 27 | 11 | 19 |
| # of effective free cells | 62 | 79 | 270 | 87 | 219 |
| Average CPU time (s) | 0.10 | 0.13 | 1.17 | 0.67 | 1.87 |
| Average fitness value | 28.67 | 23.46 | 43.84 | 52.06 | 46.82 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lee, H.-Y.; Shin, H.; Chae, J. Path Planning for Mobile Agents Using a Genetic Algorithm with a Direction Guided Factor. Electronics 2018, 7, 212. https://doi.org/10.3390/electronics7100212
Lee H-Y, Shin H, Chae J. Path Planning for Mobile Agents Using a Genetic Algorithm with a Direction Guided Factor. Electronics. 2018; 7(10):212. https://doi.org/10.3390/electronics7100212
Chicago/Turabian StyleLee, Hyeok-Yeon, Hyunwoo Shin, and Junjae Chae. 2018. "Path Planning for Mobile Agents Using a Genetic Algorithm with a Direction Guided Factor" Electronics 7, no. 10: 212. https://doi.org/10.3390/electronics7100212
APA StyleLee, H. -Y., Shin, H., & Chae, J. (2018). Path Planning for Mobile Agents Using a Genetic Algorithm with a Direction Guided Factor. Electronics, 7(10), 212. https://doi.org/10.3390/electronics7100212