Multi-Peak Double-Dwell GPS Weak Signal Acquisition Method and VLSI Implementation for Energy-Constrained Applications

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
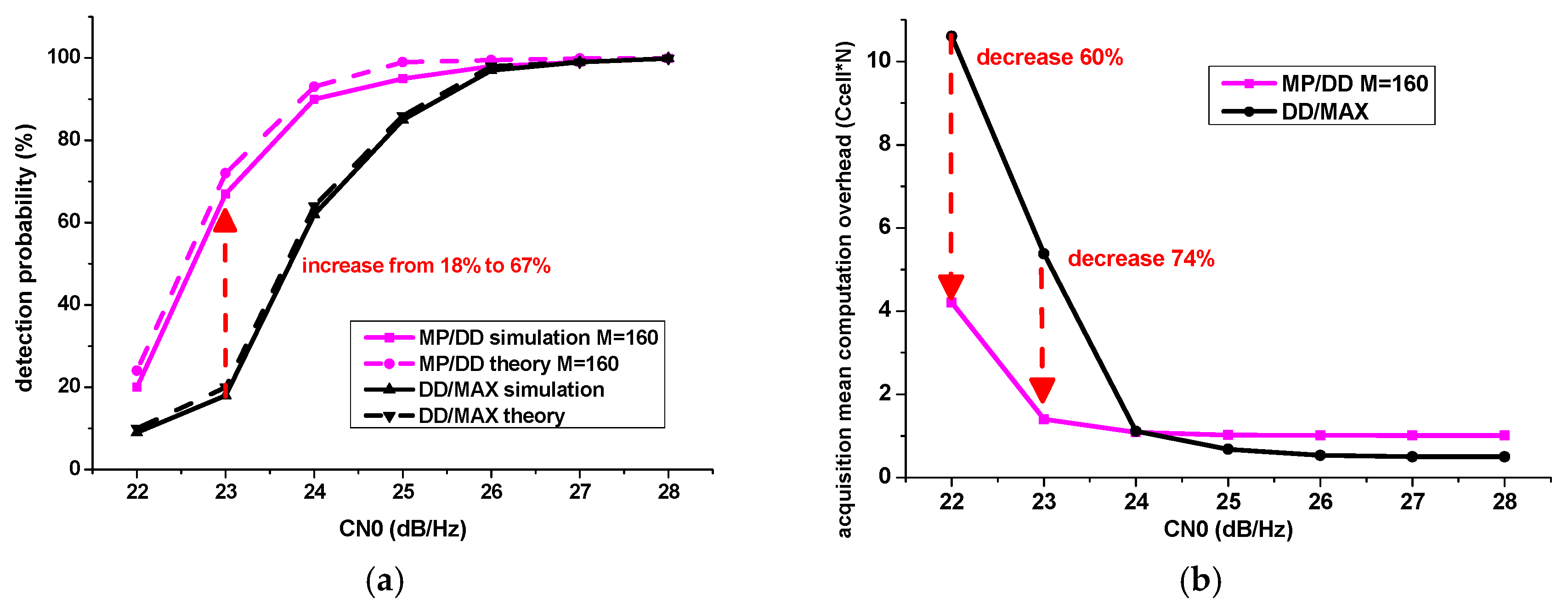
- An acquisition energy metric is proposed first to characterize the measure acquisition mean computation overhead (AMCO). Previous research focuses on the acquisition performance, not the energy consumption.
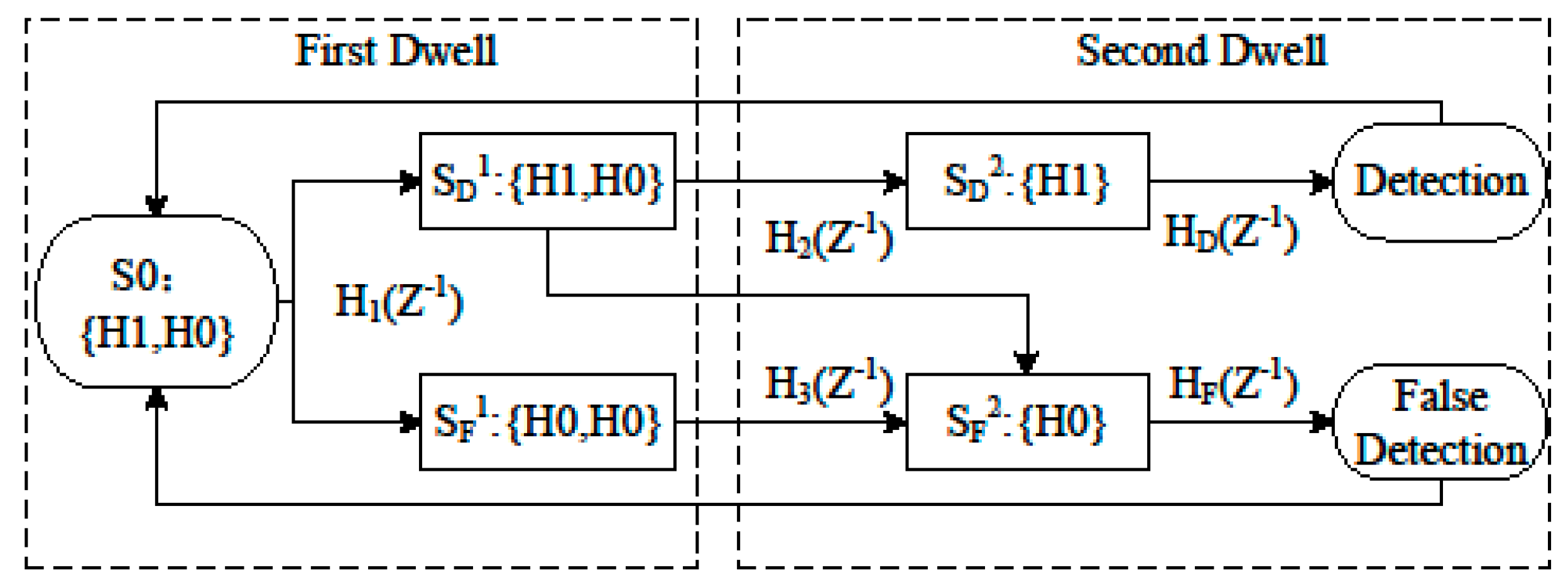
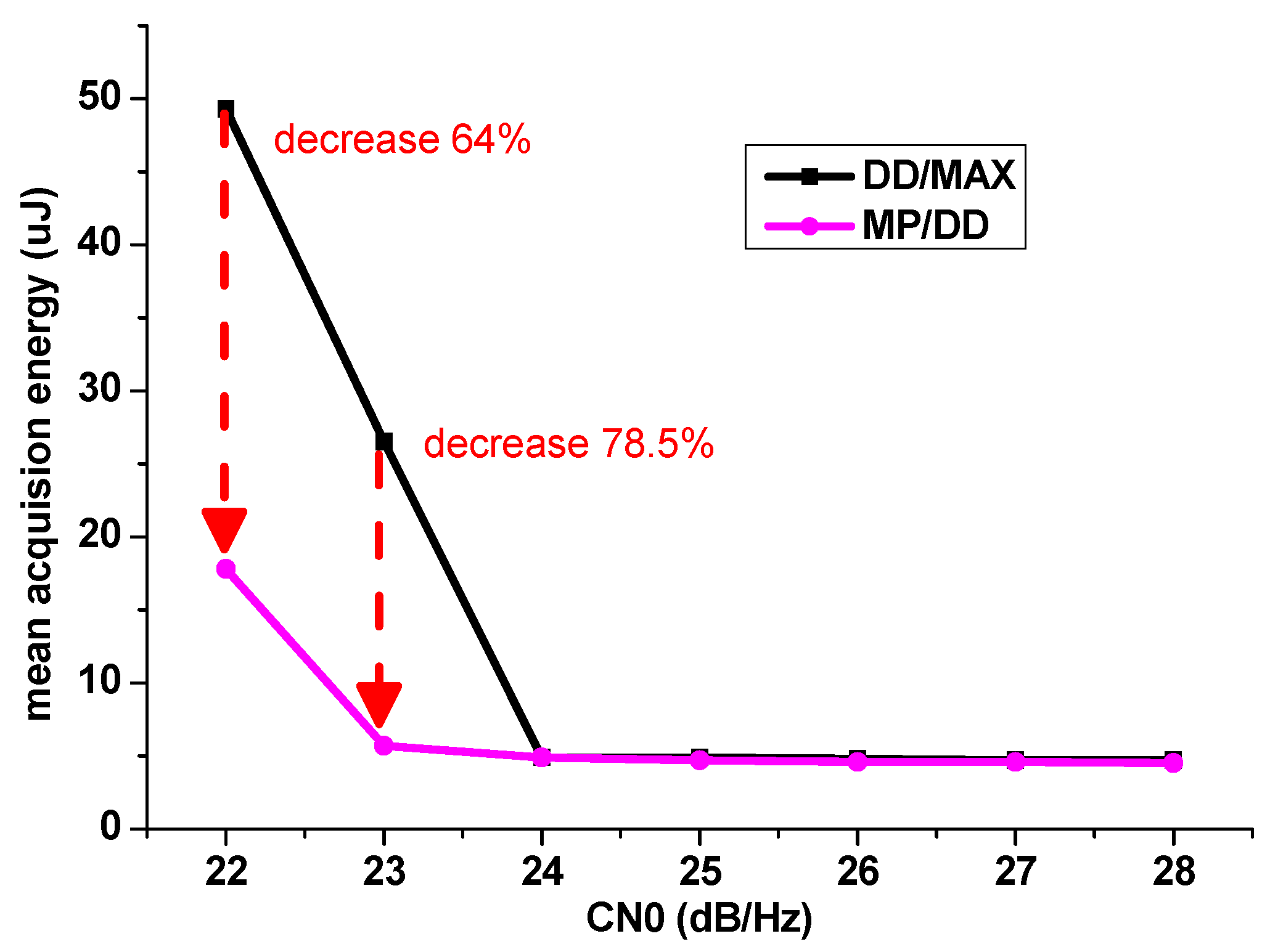
- A novel multi-peak double-dwell (MP/DD) acquisition method for GPS weak signals. Previous searching strategies (e.g., MAX/TC and DD/MAX) regard the correlation peak as the estimated signal, which is valid for strong signals. However, they ignore the fact that there is a high possibility of the signal appearing in the sub-peaks for weak signals. The MP/DD method not only detects the peak, but also some sub-peaks.
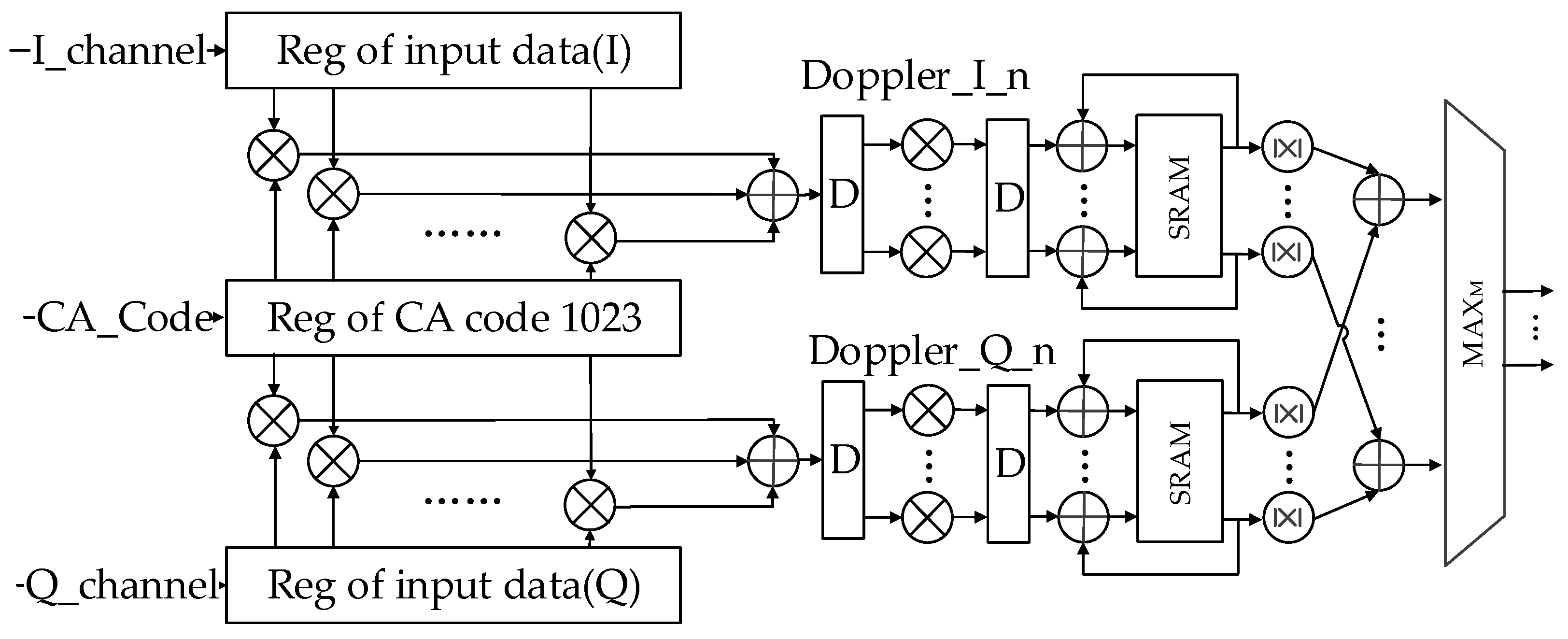
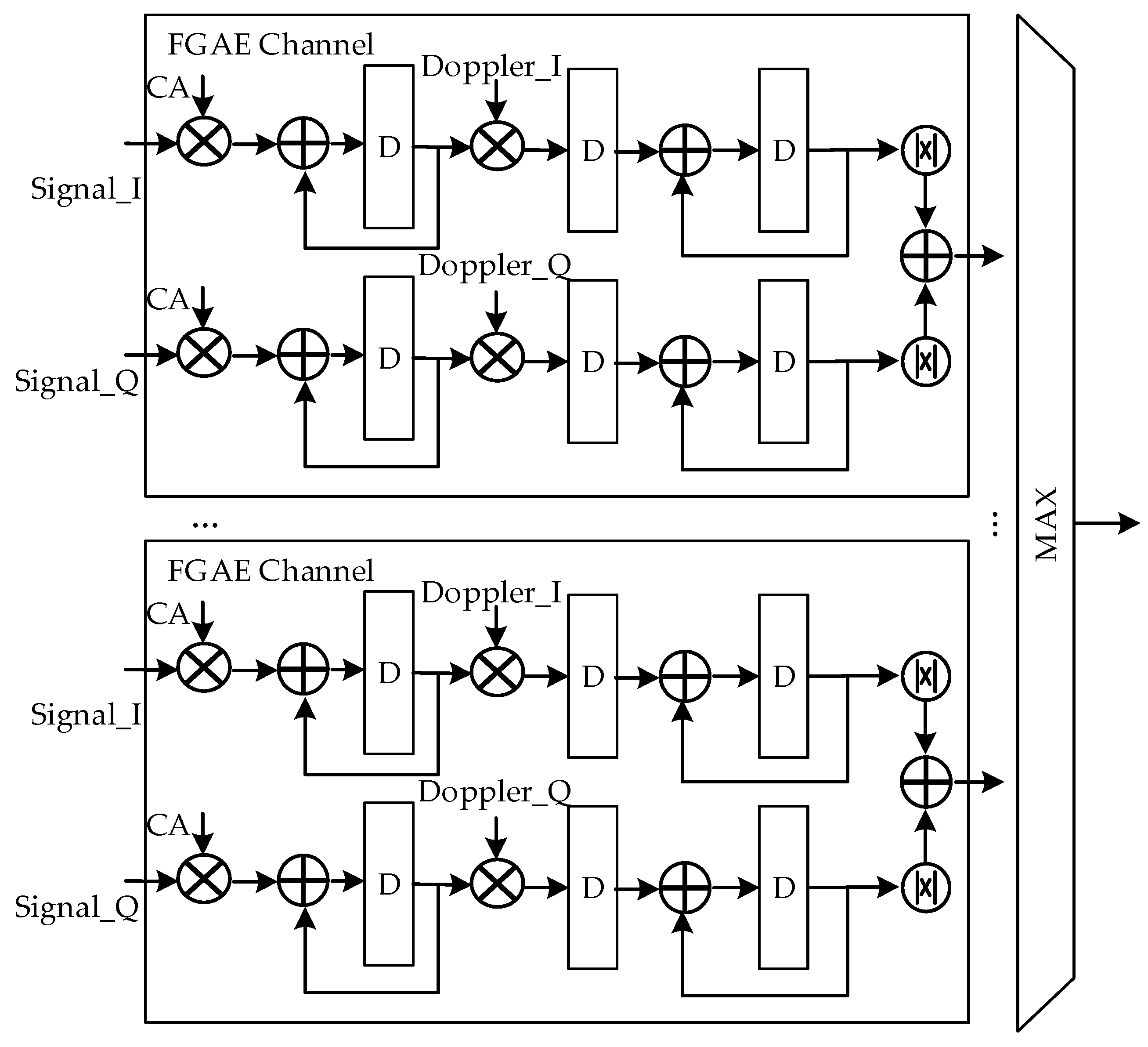
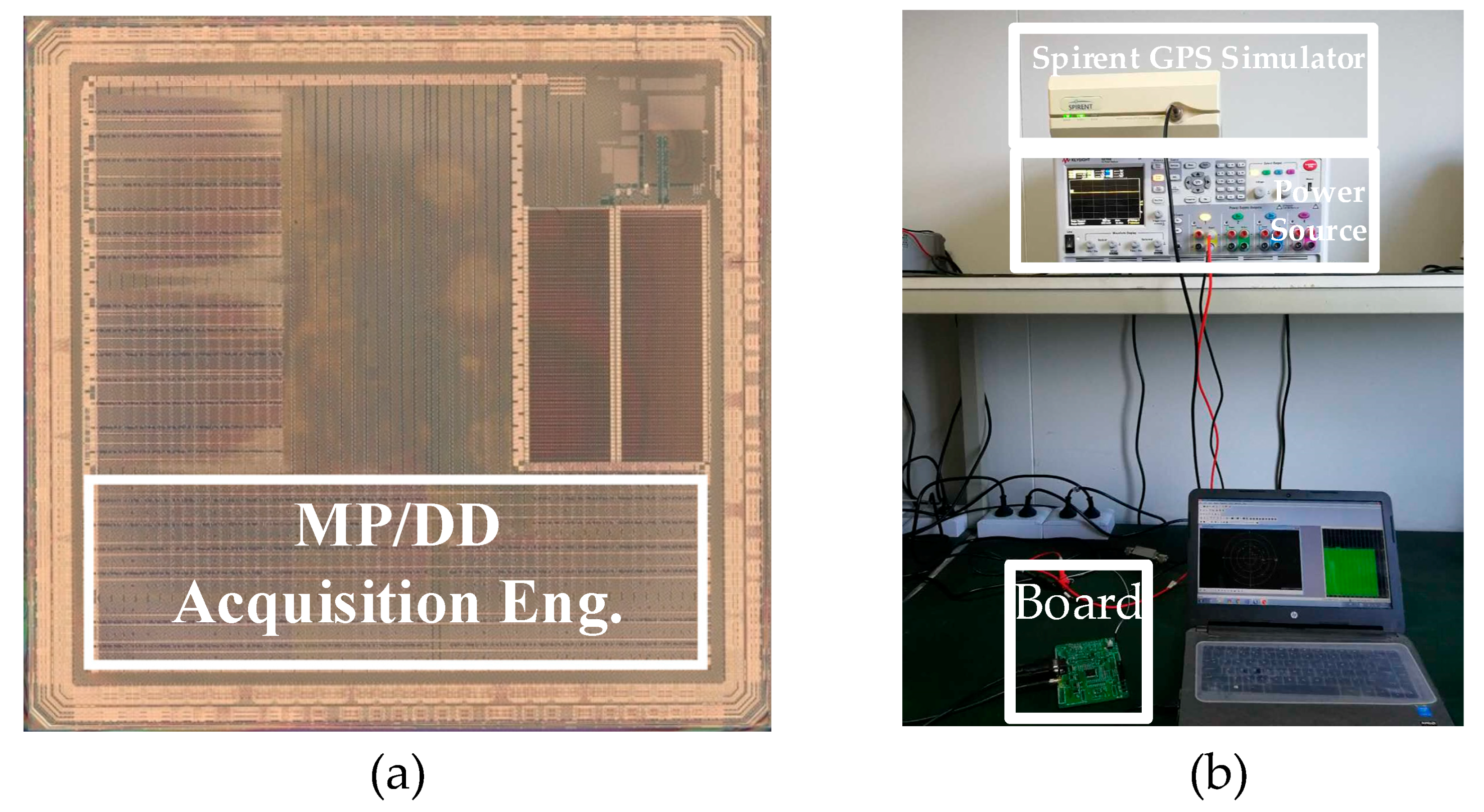
- A hybrid very-large-scale integration (VLSI) architecture is proposed, including coarse-grained acquisition in the first dwell and fine-grained acquisition in the second dwell. A test chip with MP/DD method is fabricated in 40 nm CMOS technology.
2. Materials and Methods
2.1. Acquisition Energy Metric
2.2. Proposed MP/DD Method
3. Results
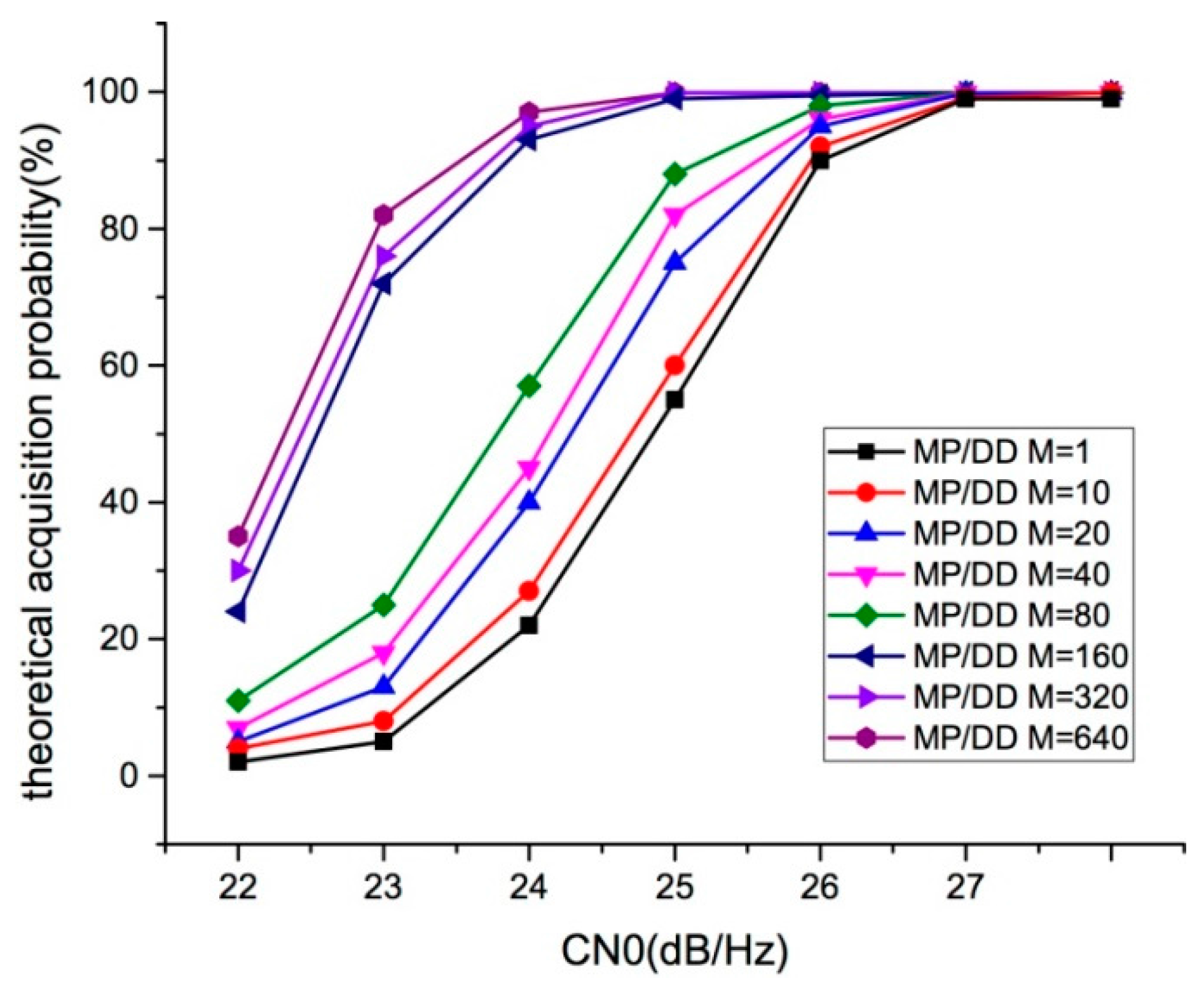
3.1. Algorithm Verification
3.2. VLSI Implementation and Test
4. Discussions
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Wei, J.M.; Chen, C.N.; Chen, K.T.; Kuo, C.F. A 110nm RFCMOS GPS SoC with 34mW–165dBm tracking sensitivity. In Proceedings of the IEEE International Solid-State Circuits Conference, San Francisco, CA, USA, 8–12 February 2009; pp. 254–255. [Google Scholar] [CrossRef]
- Rao, M.V.G.; Ratnam, D.V. Faster Acquisition Technique for Software-defined GPS Receivers. Def. Sci. J. 2015, 65, 5–11. [Google Scholar] [CrossRef]
- Ahamed, S.F.; Laveti, G.; Goswami, R.; Rao, G.S. Fast Acquisition of GPS Signal Using Radix-2 and Radix-4 FFT Algorithms. In Proceedings of the 2016 IEEE 6th International Conference on Advanced Computing (IACC), Bhimavaram, India, 27–28 February 2016; pp. 674–678. [Google Scholar] [CrossRef]
- Cui, H.; Li, Z.; Dou, Z. Fast Acquisition Method of GPS Signal Based on FFT Cyclic Correlation. Int. J. Commun. Netw. Syst. Sci. 2017, 246–254. [Google Scholar] [CrossRef]
- Albuquerque, G.L.; Valderrama, C.; Silva, F.C.; Xavier-de-Souza, S. Time-effective GPS time domain signal Acquisition Algorithm. In Proceedings of the 2016 International Conference on Localization and GNSS (ICL-GNSS), Barcelona, Spain, 28–30 June 2016. [Google Scholar] [CrossRef]
- Shang, S.; Hu, Y.; Luo, J.; Wang, Y. A new acquisition method based on differential correlation. In Proceedings of the IEEE International Conference on Communication Software and Networks, Beijing, China, 4–6 June 2016; pp. 196–200. [Google Scholar] [CrossRef]
- Zhu, C.; Fan, X. A Novel Method to Extend Coherent Integration for Weak GPS Signal Acquisition. IEEE Commun. Lett. 2015, 19. [Google Scholar] [CrossRef]
- Zhang, W.; Ghogho, M. Improved fast modified double-block zero-padding (FMDBZP) algorithm for weak GPS signal acquisition. In Proceedings of the 2010 18th European Signal Processing Conference, Aalborg, Denmark, 23–27 August 2015; pp. 1617–1621. [Google Scholar]
- Elders-Boll, H.; Dettmar, U. Efficient differentially coherent code/doppler acquisition of weak GPS signals. In Proceedings of the IEEE International Symposium on Spread Spectrum Techniques and Applications, Sydney, Australia, 30 August–2 September 2004; pp. 731–735. [Google Scholar] [CrossRef]
- Yu, W.; Zheng, B.; Watson, R.; Lachapelle, G. Differential combining for acquiring weak GPS signals. Signal Process. 2007, 87, 824–840. [Google Scholar] [CrossRef]
- Morton, Y.T.; Miller, M.; Tsui, J.; Lin, D.; Zhou, Q. GPS civil signal self-interference mitigation during weak signal acquisition. IEEE Trans. Signal Process. 2007, 55, 5859–5863. [Google Scholar] [CrossRef]
- Winternitz, L.M.B.; Bamford, W.A.; Heckler, G.W. A GPS receiver for high-altitude satellite navigation. IEEE J. Sel. Top. Signal Process. 2009, 3, 541–556. [Google Scholar] [CrossRef]
- Borio, D.; Camoriano, L.; Lo Presti, L. Impact of the acquisition searching strategy on the detection and false alarm probabilities in a CDMA receiver. In Proceedings of the IEEE/ION Position Location and Navigation Symposium (PLANS), San Diego, CA, USA, 25–27 April 2006; pp. 1100–1107. [Google Scholar] [CrossRef]
- Corazza, G.E. On the MAX/TC criterion for code acquisition and its application to DS-SSMA systems. IEEE Trans. Commun. 1996, 44, 1173–1182. [Google Scholar] [CrossRef]
- Iinatti, J. On the threshold setting principles in code acquisition of DSSS signals. IEEE J. Sel. Areas Commun. 2000, 18, 62–72. [Google Scholar] [CrossRef]
- Wang, L.; Verhagen, S.; Feng, Y. A novel ambiguity acceptance test threshold determination method with controllable failure rate. In Proceedings of the International Technical Meeting of the Satellite Division of the Institute of Navigation, Tampa, FL, USA, 8–12 September 2014.
- Lu, W.; Zhang, Y.; Lei, D.; Yu, D. Efficient weak signals acquisition strategy for GNSS receivers. IEICE Trans. Commun. 2016, 288–295. [Google Scholar] [CrossRef]
- Parkinson, B.W. Global Positioning System: Theory and Applications; American Institute of Aeronautics and Astronautics: Reston, VI, USA, 1996. [Google Scholar] [CrossRef]
- O’Driscoll, C.; Petovello, M.G.; Lachapelle, G. Software receiver strategies for the acquisition and re-acquisition of weak GPS signals. J. Guid. 2008, 6972, 843–854. [Google Scholar]







© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Z.; Zhang, H.; Wang, M.; Liu, X.; Zhuang, Y.; Cai, H.; Yang, J.; Shi, L. Multi-Peak Double-Dwell GPS Weak Signal Acquisition Method and VLSI Implementation for Energy-Constrained Applications. Electronics 2018, 7, 31. https://doi.org/10.3390/electronics7030031
Wang Z, Zhang H, Wang M, Liu X, Zhuang Y, Cai H, Yang J, Shi L. Multi-Peak Double-Dwell GPS Weak Signal Acquisition Method and VLSI Implementation for Energy-Constrained Applications. Electronics. 2018; 7(3):31. https://doi.org/10.3390/electronics7030031
Chicago/Turabian StyleWang, Zhen, Hengfeng Zhang, Min Wang, Xinning Liu, Yuan Zhuang, Hao Cai, Jun Yang, and Longxing Shi. 2018. "Multi-Peak Double-Dwell GPS Weak Signal Acquisition Method and VLSI Implementation for Energy-Constrained Applications" Electronics 7, no. 3: 31. https://doi.org/10.3390/electronics7030031
APA StyleWang, Z., Zhang, H., Wang, M., Liu, X., Zhuang, Y., Cai, H., Yang, J., & Shi, L. (2018). Multi-Peak Double-Dwell GPS Weak Signal Acquisition Method and VLSI Implementation for Energy-Constrained Applications. Electronics, 7(3), 31. https://doi.org/10.3390/electronics7030031