Detectors on Edge Nodes against False Data Injection on Transmission Lines of Smart Grid

Abstract
:1. Introduction
2. Preliminaries
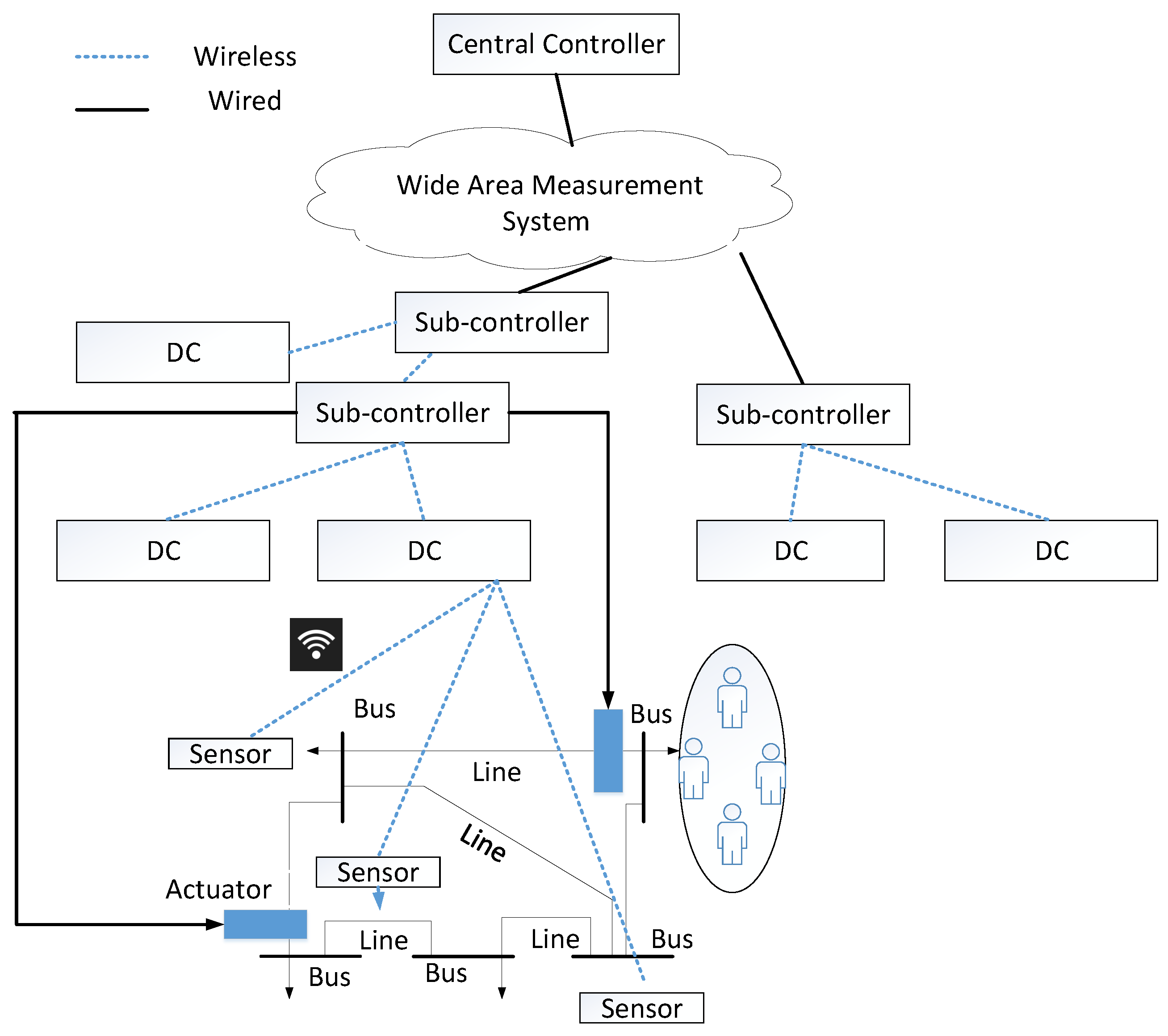
2.1. The Structure of Smart Gird
2.2. Threat Model
- (1)
- Random Attack: attackers randomly inject false data;
- (2)
- Smart Attack: attackers inject constructed bad data. The bad data satisfies
3. Our Detection Framework
3.1. Structure of Framework
3.2. Detector Construction
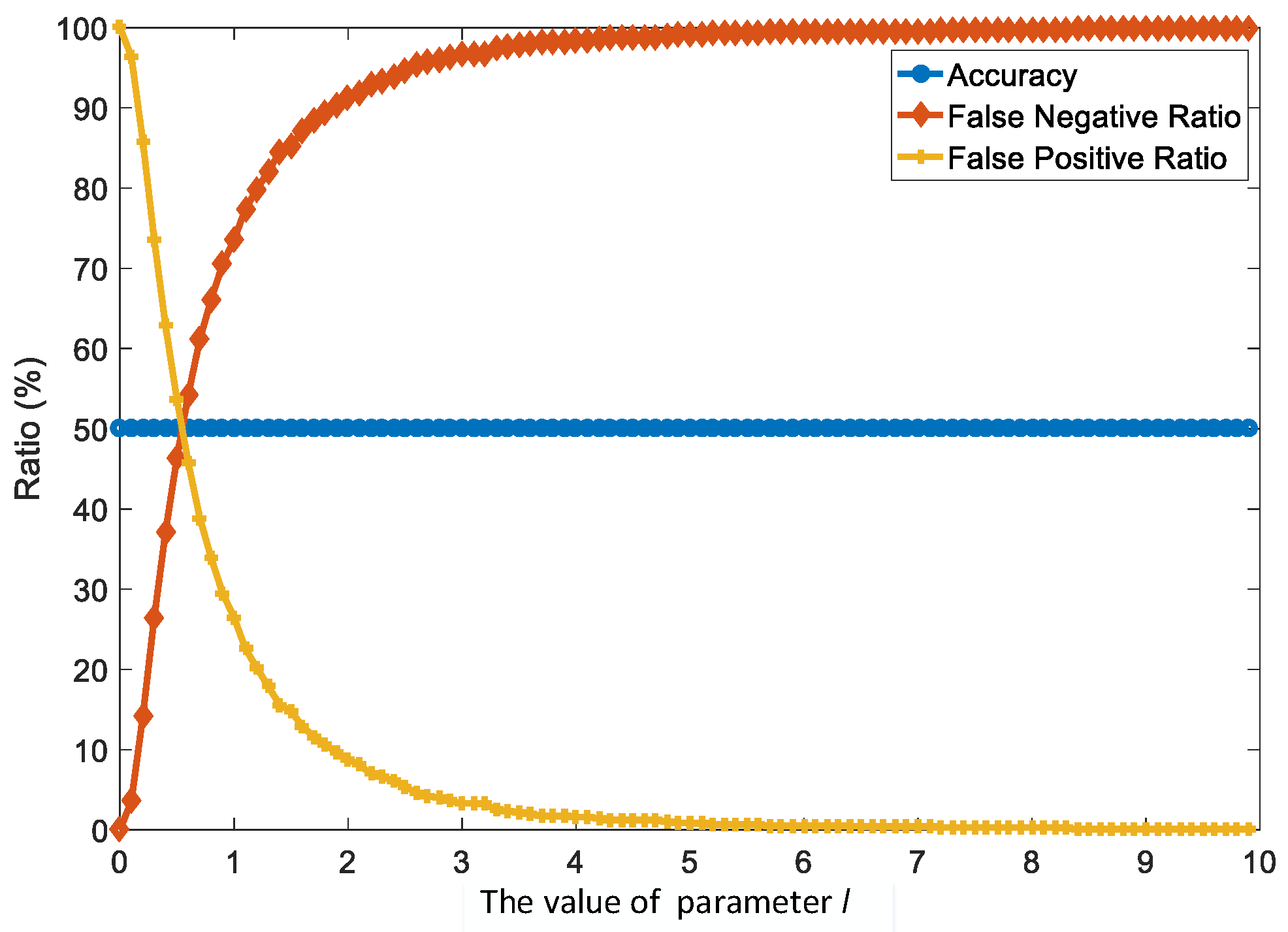
3.3. Performance Analysis
4. Numerical Results
4.1. Simulation on IEEE 14-Bus Test System
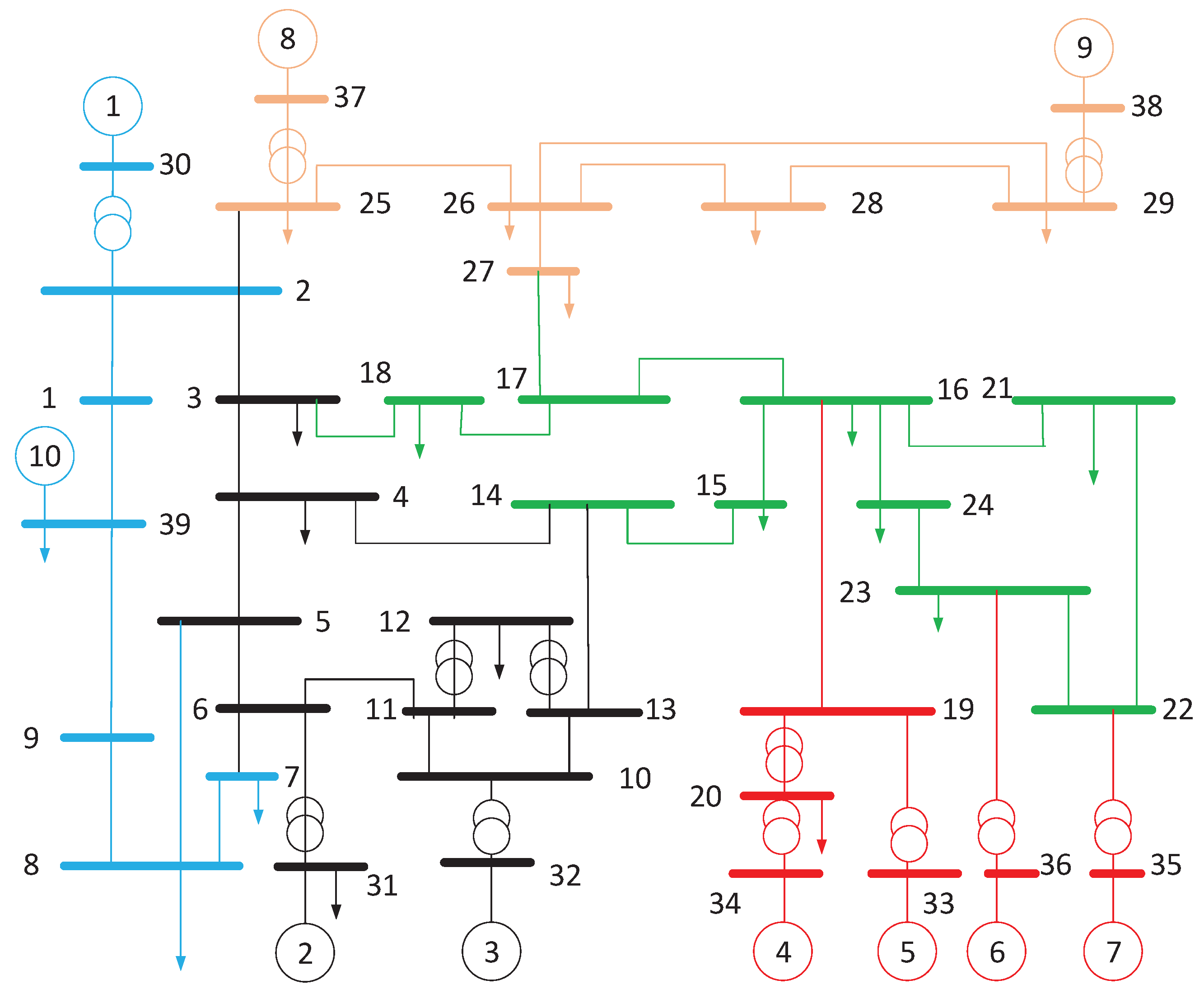
4.2. Simulation on IEEE 39-Bus Test System
5. Conclusions
Author Contributions
Acknowledgments
Conflicts of Interest
References
- Deng, R.; Xiao, G.; Lu, R.; Liang, H.; Vasilakos, A.V. False Data Injection on State Estimation in Power Systems attacks, Impacts, and Defense: A Survey. IEEE Trans. Ind. Inform. 2017, 13, 411–423. [Google Scholar] [CrossRef]
- Liu, X.; Li, Z.; Liu, X.; Li, Z. Masking Transmission Line Outages via False Data Injection Attacks. IEEE Trans. Inf. Forensics Secur. 2016, 11, 1592–1602. [Google Scholar] [CrossRef]
- Lu, Z.; Wei, M.; Lu, X. How they interact? Understanding cyber and physical interactions against fault propagation in smart grid. In Proceedings of the IEEE INFOCOM 2017—IEEE Conference on Computer Communications, Atlanta, GA, USA, 1–4 May 2017; pp. 1–9. [Google Scholar]
- Yan, J.; He, H.; Zhong, X.; Tang, Y. Q-Learning-Based Vulnerability Analysis of Smart Grid against Sequential Topology Attacks. IEEE Trans. Inf. Forensics Secur. 2017, 12, 200–210. [Google Scholar] [CrossRef]
- Abdelaziz, A.Y.; Mekhamer, S.F.; Ezzat, M.; El-Saadany, E.F. Line outage detection using support Vector Machine (SVM) based on the Phasor Measurement Units (PMUs) technology. In Proceedings of the 2012 IEEE Power and Energy Society General Meeting, San Diego, CA, USA, 22–26 July 2012; pp. 1–8. [Google Scholar]
- Garcia, M.; Catanach, T.; Wiel, S.V.; Bent, R.; Lawrence, E. Line Outage Localization using Phasor Measurement Data in Transient State. IEEE Trans. Power Syst. 2016, 31, 3019–3027. [Google Scholar] [CrossRef]
- Wang, J.; Tu, W.; Hui, L.C.K.; Yiu, S.M.; Wang, E.K. Detecting Time Synchronization Attacks in Cyber-Physical Systems with Machine Learning Techniques. In Proceedings of the 2017 IEEE 37th International Conference on Distributed Computing Systems (ICDCS), Atlanta, GA, USA, 5–8 June 2017; pp. 2246–2251. [Google Scholar]
- Pal, S.; Sikdar, B.; Chow, J. Classification and Detection of PMU Data Manipulation Attacks Using Transmission Line Parameters. IEEE Trans. Smart Grid 2017, 29, 1. [Google Scholar] [CrossRef]
- Manandhar, K.; Cao, X.; Hu, F.; Liu, Y. Detection of Faults and Attacks Including False Data Injection Attack in Smart Grid Using Kalman Filter. IEEE Trans. Control Netw. Syst. 2014, 1, 370–379. [Google Scholar] [CrossRef]
- Sun, H.; Wang, Z.; Wang, J.; Huang, Z.; Carrington, N.; Liao, J. Data-Driven Power Outage Detection by Social Sensors. IEEE Trans. Smart Grid 2016, 7, 2516–2524. [Google Scholar] [CrossRef]
- Vu, Q.D.; Tan, R.; Yau, D.K.Y. On applying fault detectors against false data injection attacks in cyber-physical control systems. In Proceedings of the IEEE INFOCOM 2016—The 35th Annual IEEE International Conference on Computer Communications, San Francisco, CA, USA, 10–14 April 2016; pp. 1–9. [Google Scholar]
- Li, B.; Lu, R.; Wang, W.; Choo, K.K.R. DDOA: A Dirichlet-Based Detection Scheme for Opportunistic Attacks in Smart Grid Cyber-Physical System. IEEE Trans. Inf. Forensics Secur. 2016, 11, 2415–2425. [Google Scholar] [CrossRef]
- Zhao, L.; Song, W.Z. Distributed power-line outage detection based on wide area measurement system. Sensors 2014, 14, 13114–13133. [Google Scholar] [CrossRef] [PubMed]
- Dubey, A.; Karsai, G.; Pradhan, S. Resilience at the edge in cyber-physical systems. In Proceedings of the 2017 Second International Conference on Fog and Mobile Edge Computing (FMEC), Valencia, Spain, 8–11 May 2017; pp. 139–146. [Google Scholar]
- Renart, E.G.; Diaz-Montes, J.; Parashar, M. Data-Driven Stream Processing at the Edge. In Proceedings of the 2017 IEEE 1st International Conference on Fog and Edge Computing (ICFEC), Madrid, Spain, 14–15 May 2017; pp. 31–40. [Google Scholar]
- Liu, X.; Li, Z. Local Load Redistribution Attacks in Power Systems with Incomplete Network Information. IEEE Trans. Smart Grid 2014, 5, 1665–1676. [Google Scholar] [CrossRef]
- Perninge, M.; Knazkins, V.; Amelin, M.; Soder, L. Modeling the electric power consumption in a multi-area system. Eur. Trans. Electr. Power 2011, 21, 413–423. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | Central SVM Detector | SVM Detectors on Edge Nodes | ||
|---|---|---|---|---|
| cc | sub-1 | sub-2 | ||
| Accuracy | 94.72% | 97.64% | 97.87% | 96.58% |
| FN | 8.55% | 4.49% | 3.42% | 6.66% |
| FP | 2.01% | 0.23% | 0.84% | 0.18% |
| Method | Central SVM Detector | SVM Detectors on Edge Nodes | ||||||
|---|---|---|---|---|---|---|---|---|
| cc | sub-1 | sub-2 | sub-3 | sub-4 | sub-5 | Average | ||
| Accuracy | 92.72% | 98% | 96.87% | 96.58% | 97.81% | 97.37% | 96.52% | 97.19% |
| FN | 12.70% | 3.38% | 3.42% | 6.66% | 3.54% | 4.20% | 6.34% | 4.59% |
| FP | 1.85% | 0.62% | 2.84% | 0.18% | 0.84% | 1.06% | 0.62% | 1.03% |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xun, P.; Zhu, P.; Zhang, Z.; Cui, P.; Xiong, Y. Detectors on Edge Nodes against False Data Injection on Transmission Lines of Smart Grid. Electronics 2018, 7, 89. https://doi.org/10.3390/electronics7060089
Xun P, Zhu P, Zhang Z, Cui P, Xiong Y. Detectors on Edge Nodes against False Data Injection on Transmission Lines of Smart Grid. Electronics. 2018; 7(6):89. https://doi.org/10.3390/electronics7060089
Chicago/Turabian StyleXun, Peng, Peidong Zhu, Zhenyu Zhang, Pengshuai Cui, and Yinqiao Xiong. 2018. "Detectors on Edge Nodes against False Data Injection on Transmission Lines of Smart Grid" Electronics 7, no. 6: 89. https://doi.org/10.3390/electronics7060089
APA StyleXun, P., Zhu, P., Zhang, Z., Cui, P., & Xiong, Y. (2018). Detectors on Edge Nodes against False Data Injection on Transmission Lines of Smart Grid. Electronics, 7(6), 89. https://doi.org/10.3390/electronics7060089