A Multi-Mode Sensor Management Approach in the Missions of Target Detecting and Tracking


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
- (1)
- Continuity and relevance are lacking in sensor management (including sensor deployment and sensor scheduling). For example, when conducting sensor scheduling, authors usually did not consider sensor deployment, and there are not suitable sensor networks deployed by other sensor deployment approaches to apply their sensor scheduling approaches. Obviously, sensor scheduling is based on sensor deployment and, accordingly, operates after it. In addition, when deploying sensor networks, the sensing radius of sensors must be taken into consideration. However, when scheduling sensors in reality, it is ignored.
- (2)
- Different kinds of combat missions (including target detecting and target tracking) are analyzed independently. In a combat, with new targets appearing and acquired targets disappearing, different kinds of missions emerge at the same time, which means that a sensor network must detect targets and track targets simultaneously. Obviously, at this point, the sensor management model is totally different from those only considering one type of combat mission. Unfortunately, multi-mission sensor management approaches are seldom reported.
2. Problem Analysis and Model Hypothesis
2.1. Combat Situation
2.2. Model Hypothesis
3. Sensor Management Models
3.1. Target Detecting Model and Sensor Deployment Model
3.1.1. Calculation of Target Detecting Probability
3.1.2. Calculation of Monitoring Priority
3.1.3. The Objective Function in Sensor Deployment
3.2. Target Tracking Model and Sensor Scheduling Model
3.2.1. Calculation of Target Missing Probability
3.2.2. Calculation of Target Threat Priority
3.2.3. The Objective Function in Sensor Scheduling
- (1)
- Each target is tracked by only one sensor, therefore .
- (2)
- Each sensor processes two kinds of working mode, target detecting and target tracking, but it can select only one working mode at any moment. Furthermore, when a sensor selects the target tracking mode, it can track only one target, namely .
- (3)
- Sensor can detect target at the time instant only if the target emerges in the detecting area of sensor , namely .
4. Algorithm Design
- (1)
- nectar sources (feasible schemes) are first provided, and the th nectar source can be given utilizing the following equation:where is the th dimension value of th nectar source; and are the maximum and minimum values of the th dimension in the th nectar source, respectively; is a random number satisfying uniform distribution between 0 to 1; and is the total dimensions of a feasible scheme.
- (2)
- Each nectar source is assigned a searching bee and searched around times. Once the new source is better than the old one, the old source is replaced by the new one. The nectar source searching equation is shown as follows:where is the th dimension value of the th new nectar source, is a random neighborhood of the current nectar source, and is a random number satisfying the uniform distribution between −1 and 1.
- (3)
- Calculate the fitness value of updated nectar sources according to Equation (10) or Equation (19) separately.
- (4)
- Searching bees return to the honeycomb and change into leading bees. and following bees choose different leading bees according to the forward probability and reverse probability separately. The following bees go after their chosen leading bees to related nectar sources and search new sources according to Equation (21). The forward probability and reverse probability are shown by Equation (22) [47] and Equation (23).where and are the chosen probabilities of th nectar source according to the forward probability and the reverse probability, respectively.
- (5)
- If a nectar source has never been updated continuously up to times, this nectar source can be discarded, and a new nectar source can be obtained by Equation (20) or Equation (24) randomly.where is the speed of th dimension, is the inertia weight, and are positive constants, is the local optimum of th dimension, and is the global optimum of the th dimension.
- (6)
- Make a judgment of whether the maximum number of iterations is reached. If reached, end the algorithm, otherwise, go back to (3).
5. Simulations
5.1. Simulations of Sensor Deployment
5.2. Simulations of Sensor Scheduling
5.3. Simulations of Sensor Scheduling during a Time Period
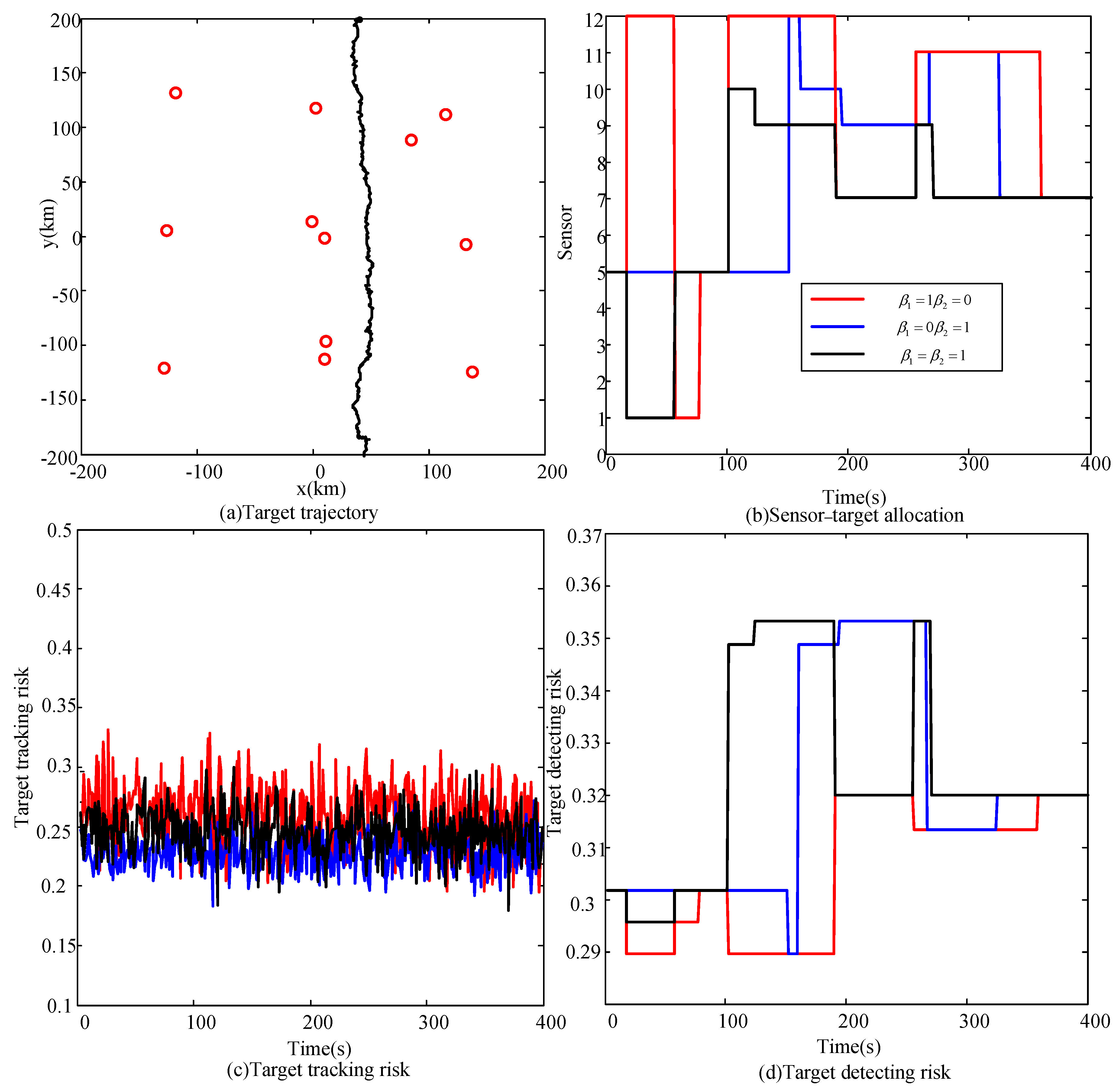
5.4. Influences of the Weights to Sensor Scheduling Schemes
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Nash, J.M. Optimal allocation of tracking resource. In Proceedings of the IEEE Conference on Decision and Control, New Orleans, LA, USA, 7–9 December 1977; pp. 1177–1180. [Google Scholar]
- Evans, J.; Krishnamurthy, V. Optimal sensor scheduling for Hidden Markov Model state estimation. Int. J. Control 2001, 74, 1737–1742. [Google Scholar] [CrossRef]
- Chhetri, A.S.; Orrell, D.; Papandreou, S.A. On the use of binary programming for sensor scheduling. IEEE Trans. Signal Process. 2007, 55, 2826–2839. [Google Scholar] [CrossRef]
- Ahmad, B.A.; Syed, T.J.; Stephen, L.S. A complete greedy algorithm for infinite-horizon sensor scheduling. Automatica 2017, 281, 335–341. [Google Scholar]
- Castanon, D.A. Approximate dynamic programming for sensor management. In Proceedings of the 36th IEEE Conference on Decision and Control, New Orleans, LA, USA, 7–9 December 1977; Volume 2, pp. 1202–1207. [Google Scholar]
- Hoang, H.G.; Vo, B.T. Sensor management for multi-target tracking via multi-Bernoulli filtering. Automatica 2014, 50, 1135–1142. [Google Scholar] [CrossRef] [Green Version]
- Kevin, M.N.; Jonathan, T.B. An autonomous sensor management strategy for monitoring a dynamic space domain with diverse sensors. In Proceedings of the 2018 AIAA Information Systems, Kissimmee, FL, USA, 8–12 January 2018; pp. 1–29. [Google Scholar]
- Fang, D.L.; Ren, X.M.; Li, O. Energy efficient distributed sensor management algorithm. J. Xidian Univ. 2017, 44, 171–177. [Google Scholar]
- Saurav, S.; Yimin, D.Z.; Moeness, G.A. Cramer–Rao type bounds for sparsity-aware multi-sensor multi-target tracking. Signal Process. 2018, 145, 68–77. [Google Scholar]
- Yang, C.; Kaplan, L.; Blasch, E. Performance measures of covariance and information matrices in resource management for target state estimation. IEEE Trans. Aerosp. Electron. Syst. 2012, 48, 2594–2613. [Google Scholar] [CrossRef]
- Siddharth, J.; Stephen, B. Sensor selection via convex optimization. IEEE Trans. Signal Process. 2009, 57, 451–462. [Google Scholar]
- Wayes, T.; Nipun, W.; Wen, T.L.; Chau, Y.H.; Vincent, P.; Tapan, K.S.; Kristin, L.W. Internet of things for green building management: Disruptive innovations through low-cost sensor technology and artificial intelligence. IEEE Signal Process. Mag. 2018, 3, 100–110. [Google Scholar]
- Yan, T.; Han, C.Z. Sensor management for multi-target detection and tracking based on PCRLB. In Proceedings of the 2017 20th International Conference on Information Fusion, Xi’an, China, 10–13 July 2017. [Google Scholar]
- Hong, H.G.; Maule, R. The Cauchy-Schwarz divergence for Poisson point process. IEEE Trans. Aerosp. Electron. Syst. 2015, 61, 4475–4485. [Google Scholar]
- Tharmarasa, R.; Kirubajan, T. Decentralized sensor selection for large-scale multisensor-multitarget tracking. IEEE Trans. Aerosp. Electrion. Syst. 2011, 47, 1307–1324. [Google Scholar] [CrossRef]
- Mario, B.I.M.; Ivan, P. Score matching based assumed fensity filtering with the von mises-Fisher distributed. In Proceedings of the 2017 20th International Conference on Information Fusion, Xi’an, China, 10–13 July 2017; pp. 433–438. [Google Scholar]
- Sayin, M.O.; Lin, C.W.; Shiraishi, S.; Shen, J.; Başar, T. Information-driven autonomous intersection control via incentive compatible mechanisms. IEEE Trans. Intell. Transp. Syst. 2018, 99, 1–13. [Google Scholar] [CrossRef]
- Ferri, G.; Andera, M.; Kevin, D.L. An autonomous underwater vehicle data-driven control strategy for target tracking. IEEE J. Ocean. Eng. 2018, 43, 323–343. [Google Scholar] [CrossRef]
- Li, Y.; Devesh, K.; Jha, A.R.; Thomas, A.W. Information-theoretic performance analysis of sensor networks via Markov modeling of time series data. IEEE Trans. Cybern. 2018, 48, 1898–1909. [Google Scholar] [CrossRef] [PubMed]
- Li, W.; Han, C.Z. Dual sensor control scheme for multi-target tracking. Sensors 2018, 18, 1653. [Google Scholar] [CrossRef] [PubMed]
- Bolderheij, F.; Absil, F.; Van, G.P. A risk-based object-oriented approach to sensor management. In Proceedings of the 8th International Conference on Information Fusion, Philadelphia, PA, USA, 25–29 July 2005; Volume 1, p. 8. [Google Scholar]
- Wang, Y.; Hussein, I.I.; Erwin, R.S. Risk-based sensor management for integrated detection and eistimation. In Proceedings of the 2011 American Control Conference, San Francisco, CA, USA, 29 June 29–1 July 2011; pp. 168–189. [Google Scholar]
- Sean, M. Risk-based sensor resource management for field of view constraint sensor. In Proceedings of the 18th International Conference on Information Fusion, Washington, DC, USA, 6–9 July 2015; pp. 2041–2048. [Google Scholar]
- Marcos, E.G.B.; Dominique, M.; Philippe, V. Sensor management using expected risk reduction approach. In Proceedings of the 19th International Conference on Information Fusion, Heidelberg, Germany, 5–8 July 2016; pp. 2050–2058. [Google Scholar]
- Marcos, E.G.B.; Dominique, M.; Philippe, V. A risk-based sensor management using random finite sets and POMDP. In Proceedings of the 20th International Conference on Information Fusion, Xi’an, China, 10–13 July 2017; pp. 1588–1596. [Google Scholar]
- Fptios, K.; Hans, D.; Alexander, Y. Threat-based sensor management for target tracking. IEEE Trans. Aerosp. Electron. Syst. 2015, 51, 2772–2784. [Google Scholar]
- Gostar, A.; Hoseinnezhad, R.; Weifebg, L. Sensor-management for multi-target filters via minimization of posterior dispersion. IEEE Trans. Aerosp. Electron. Syst. 2017, 53, 2877–2884. [Google Scholar] [CrossRef]
- Ozturk, O.; Begen, M.A.; Zaric, G.S. A branch and bound algorithm for scheduling unit dize jobs on parallel batching machines to minimize makespan. Int. J. Prod. Res. 2017, 55, 1815–1831. [Google Scholar] [CrossRef]
- Stiven, S.D.; Marcelo, G.S.B. Cooperative target tracking using decentralized particle filtering and RSS sensors. IEEE Trans. Signal Process. 2013, 61, 3632–3646. [Google Scholar]
- Mohammed, A.Z.; Nabil, Z.S.; Shigenobu, S.; Sabah, M.A. A centralized immune-voronoi deployment algorithm for coverage maximization and energy conservation in mobile wireless sensor networks. Information Fusion. 2016, 30, 36–51. [Google Scholar]
- Tkach, I.; Jevtić, A.; Nof, S.Y.; Edan, Y. A modified distributed bees algorithm for multi-sensor task allocation. Sensors 2018, 18, 759. [Google Scholar] [CrossRef] [PubMed]
- Sang, J.Y.; Anish, P.S.; Seo, M.; Han, C.H.; Minho, P.; Lee, K.E. Joint spectrum sensing and resource allocation optimization using genetic algorithm for frequency hopping–based cognitive radio networks. Int. J. Commun. Syst. 2018, 31, e3733. [Google Scholar]
- Vaishali, R.; Kulkarni, V.D. Computational intelligence for localization of mobile wireless sensor networks. Adv. Intell. Syst. Comput. 2018, 2, 449–463. [Google Scholar]
- Liu, X.M.; Guo, Y.; Li, W.; Hua, M.; Ding, E.J. A complete feasible and nodes-grouped scheduling algorithm for wireless rechargeable sensor networks in tunnels. Sensors 2018, 18, 3410. [Google Scholar] [CrossRef] [PubMed]
- Enrique, C.N.; Alfredo, G.; Lin, C.Y. A game-theoretic approach to efficient power management in densor networks. Oper. Res. 2008, 56, 552–556. [Google Scholar]
- Fu, Y.F.; Ling, Q.; Tian, Z. Distributed sensor allocation for multi-target tracking in wireless sensor networks. IEEE Trans. Aerosp. Electron. Syst. 2012, 48, 3538–3553. [Google Scholar] [CrossRef]
- Severson, T.A.; Derek, A.P. Distributed multitarget search and track assignment with consensus-based coordination. IEEE Sens. J. 2015, 15, 864–875. [Google Scholar] [CrossRef]
- Peyman, N.; Mahmoud, N.Z.; Saeid, A.; Yaghmaee, M.H. Distributed clustering-task scheduling for wireless sensor networks using dynamic hyper round policy. IEEE Trans. Mob. Comput. 2018, 17, 334–347. [Google Scholar]
- Jia, B.; Pham, K.D.; Blasch, E.; Shen, D. Consensus-based auction algorithm for distributed sensor management in space object tracking. In Proceedings of the 2017 IEEE Aerospace Conference, Big Sky, MT, USA, 4–11 March 2017; pp. 1–8. [Google Scholar]
- Hemalatha, S.V.; Malathi, S.; Scholar, P.G. Auction based patient health detection scheme using group management techniques in wireless sensor networks. Int. J. Eng. Sci. Comput. 2018, 8, 18342–18345. [Google Scholar]
- Rahmani, H.A.A.; Babaee, T.E. A gravitational emulation local search algorithm for task scheduling in multi-agent system. Int. J. Appl. Optim. Stud. 2018, 1, 11–24. [Google Scholar]
- Mahafza, B.R. Radar Systems Analysis and Design Using MATLAB, 2nd ed.; Publishing House of Electronics Industry: Beijing, China, 2008; pp. 201–231. [Google Scholar]
- Alexander, G.; Voronovich; Valery, U.Z. Bistatic radar equation for signals of opportunity revisited. IEEE Trans. Geosci. Remote Sens. 2018, 56, 1959–1968. [Google Scholar]
- Alexey, S.; Narykov; Alexander, Y. Sensor selection algorithm for optimal management of the tracking capability in multisensor radar system. In Proceedings of the 2013 European Microwave Conference, Nuremberg, Germany, 6–10 October 2013; pp. 499–502. [Google Scholar]
- James, Z.; Hare, S.G.; Thomas, A. POSE: Prediction-based opportunistic sensing for energy efficiency in sensor networks using distributed supervisors. IEEE Trans. Cybern. 2017, 48, 2114–2127. [Google Scholar]
- Kanaboga, D.; Basturk, B. A comparative study of artificial bee colony algorithm. Appl. Soft Comput. 2008, 8, 687–696. [Google Scholar] [CrossRef]
- Ning, J.; Liu, T.T.; Zhang, C.; Zhang, B. Source-updating information-guided artificial bee colony algorithm. Neural Comput. Appl. 2018, 30, 775–787. [Google Scholar] [CrossRef]












© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pang, C.; Shan, G.; Duan, X.; Xu, G. A Multi-Mode Sensor Management Approach in the Missions of Target Detecting and Tracking. Electronics 2019, 8, 71. https://doi.org/10.3390/electronics8010071
Pang C, Shan G, Duan X, Xu G. A Multi-Mode Sensor Management Approach in the Missions of Target Detecting and Tracking. Electronics. 2019; 8(1):71. https://doi.org/10.3390/electronics8010071
Chicago/Turabian StylePang, Ce, Ganlin Shan, Xiusheng Duan, and Gongguo Xu. 2019. "A Multi-Mode Sensor Management Approach in the Missions of Target Detecting and Tracking" Electronics 8, no. 1: 71. https://doi.org/10.3390/electronics8010071
APA StylePang, C., Shan, G., Duan, X., & Xu, G. (2019). A Multi-Mode Sensor Management Approach in the Missions of Target Detecting and Tracking. Electronics, 8(1), 71. https://doi.org/10.3390/electronics8010071