1. Introduction
Radio-frequency (RF) devices such as spiral inductors and microstrip interdigital capacitors have been widely used in low noise amplifiers, power amplifiers and voltage-controlled oscillators; and many other RF devices are used in silicon-based radio-frequency integrated circuits (RFICs) [
1]. Accurate equivalent circuit models for these components are highly desirable for RFIC designs.
For a given device layout, an equivalent circuit can be constructed by a parasitic extraction tool. In general, the parasitic extraction tool is based on quasi-static analysis, which makes the equivalent circuit inaccurate at high frequencies. To improve the accuracy of the equivalent circuit model, it is a common practice to adjust the circuit elements of the equivalent circuit model by using accurate full-wave simulation results [
2,
3].
In practice, some RF devices can use simple T-, π- or ladder models as their equivalent circuits. For relatively complex RF designs, however, one may build better but more complex equivalent circuits based on their layouts with physical insights. For example, the equivalent circuits of the aperture-coupled resonator frequency-selective surface (FSS) [
4], spiral inductors [
5,
6], and interdigital capacitors [
7] have been constructed with physical insights. Once the equivalent circuit for a RF device is determined, the element parameters of the equivalent circuit can be extracted based on the full-wave results by optimization methods [
8].
In order to build accurate equivalent circuit models, reliable and effective parameter extraction methods are required. In general, the values of circuit element parameters can be determined by genetic algorithm (GA) [
9,
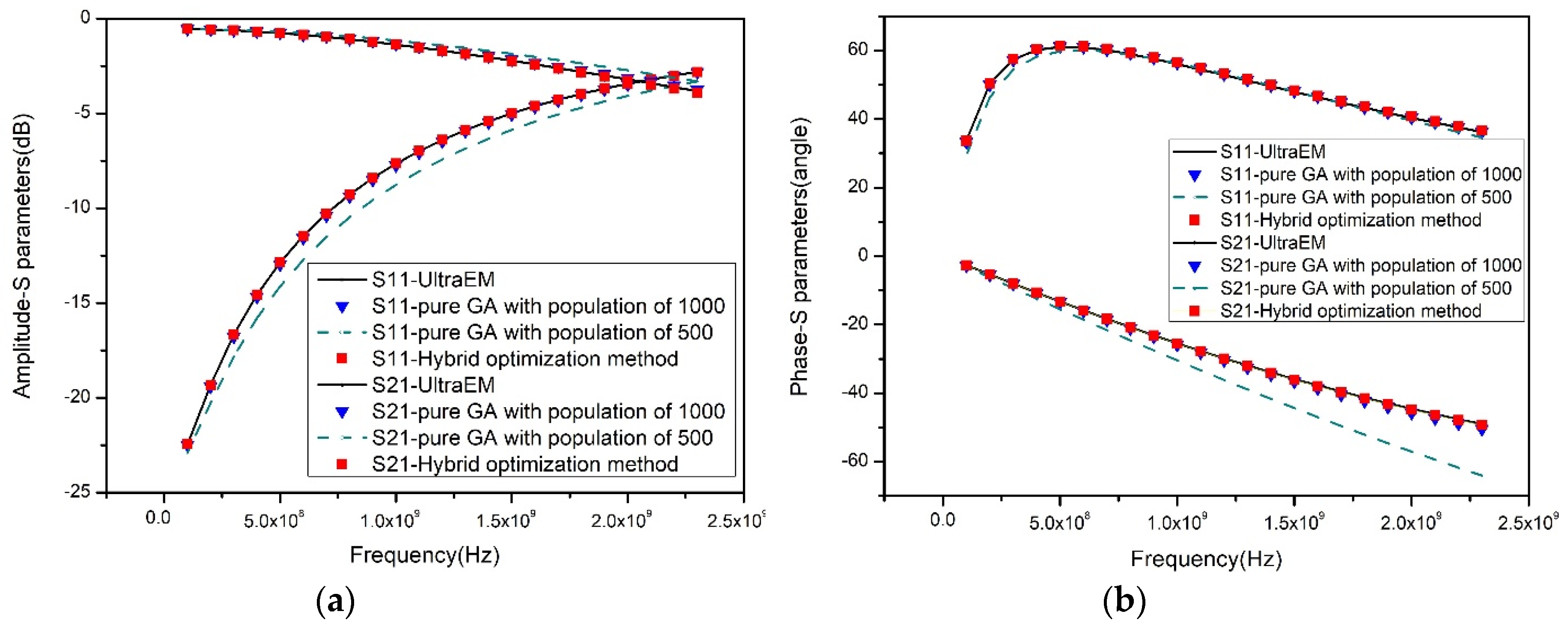
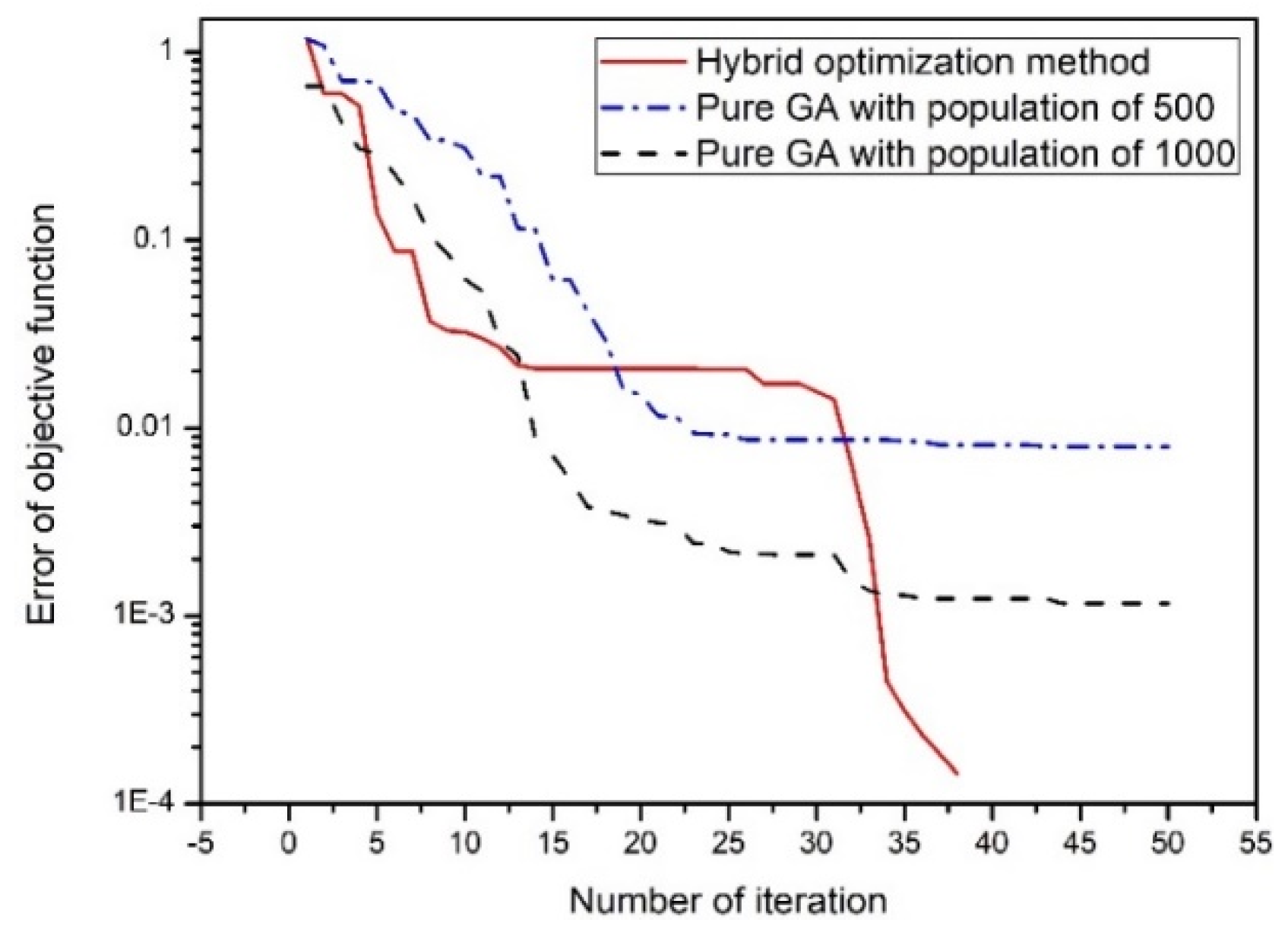
10], which is an effective global and gradient-free optimization method. However, for the optimization problem of continuous function (e.g., the parameter extraction), the convergence rate of GA is slow, and particularly it is very ineffective for local optimization. More seriously, it is highly reliant on initial population [
11]. If the initial population is not set appropriately, GA may be unable to find appropriate results. If a small population is used, the solution set will have small population diversity, and it may tend to cause the premature convergence problem [
12]. As a result, the optimization solution may be inaccurate. Although some methods have been proposed to handle the premature convergence problem [
13], the convergence rate of GA is hardly improved. In addition, if a large population is used, the optimization results may be more accurate, but the convergence rate becomes very slow. On the other hand, a conjugate gradient (CG) optimization algorithm, such as Powell’s method [
14] combined with a one-dimensional search method (e.g., golden section search [
15]), has strong local optimization ability and fast convergence rate [
16], but the drawback of trapping in local minima restricts its applications.
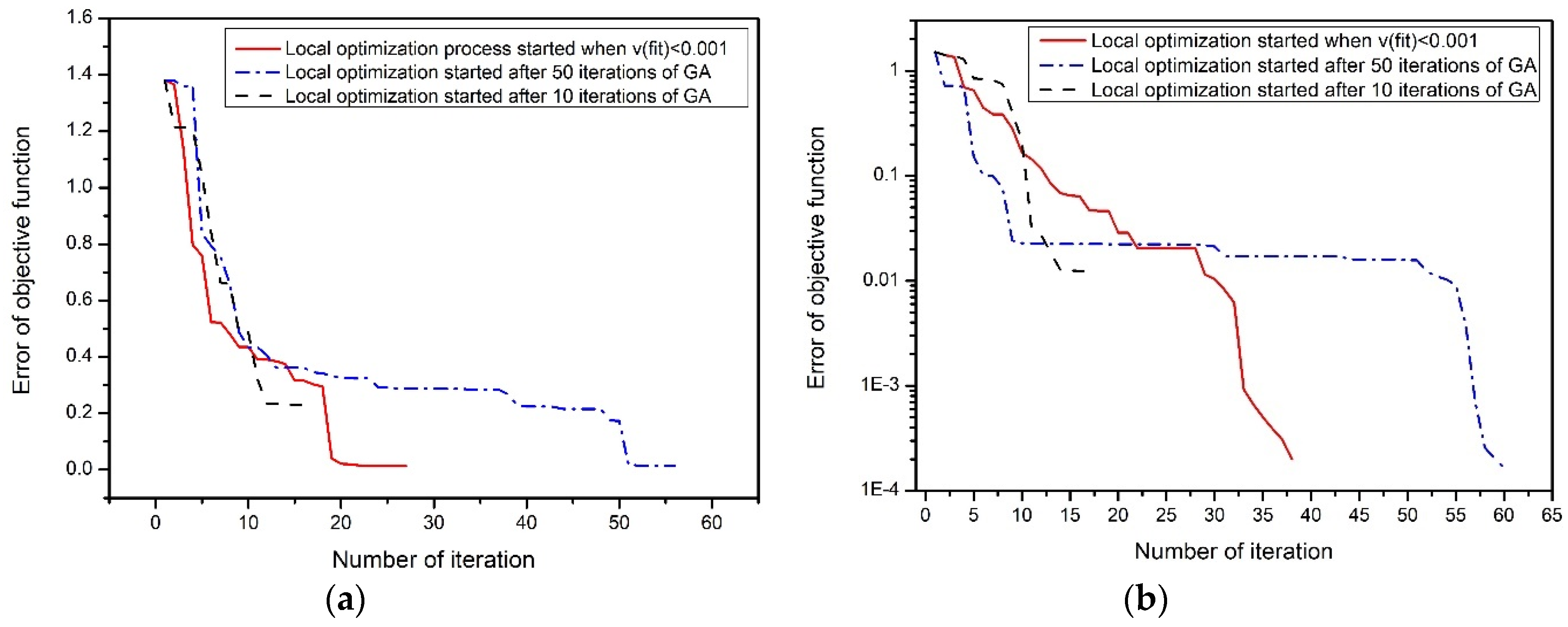
In this work, a parameter exaction method based on a hybrid GA–Powell’s method is proposed. The solution can be close to the global minimum after applying GA. Then, the best individual of GA is set as the start point of the local optimization process of Powell’s method. Determining when to start the local optimization process is important. If the local optimization process starts too early, the hybrid optimization method may easily trap at a local minimum. On the other hand, if it starts too late the hybrid optimization method may waste some unnecessary time on the global search process. To save the time on the global search process, the iteration number of the global search process is brutally reduced from 500 to 100 in a handbook [
17]. However, it cannot be guaranteed that the result from 100 iterations of GA is an appropriate starting point of the local optimization process since the convergence rate differs from case to case. To effectively determine the appropriate starting point of the local optimization process, the variance of the fitness of population is used as a criterion. Using this hybrid optimization algorithm, an accurate solution of the global minimum is achievable. This method combines the merits of the global search ability of GA and the local search capability of Powell’s method with good accuracy and rapid convergence. Hence, this hybrid method is very effective in the parameter extraction of equivalent circuits.
To efficiently obtain the full-wave simulation results for a given device layout, a highly-efficient full-wave EM simulation tool, called UltraEM
® [
18], is employed to generate the Y-parameters of the device layout. These full-wave Y-parameters are set as the optimization objectives for the proposed hybrid GA–Powell’s method to adjust values of the circuit elements so that the difference between the full-wave Y-parameters and the Y-parameters of the equivalent circuit (which can be calculated by a circuit simulation tool [
19]) is globally minimized.
The proposed method may have some limitations: Firstly, although this hybrid optimization method accelerates the parameter extraction of RF devices, it still cannot solve the problem of parameter extraction in a very wide frequency band, since RF devices may have different properties in different frequency bands [
20]. That is, one specific equivalent circuit model may not be able to match the physical model of a certain RF device in its entire frequency band. Secondly, the efficiency of the hybrid optimization method is affected by its initial population of GA. If the initial population is inappropriately set, the proposed method may not be able to find the appropriate global minimum.
The rest of this paper is organized as follows. In
Section 2, the hybrid optimization method based on GA and Powell’s method is introduced. The efficiency of this hybrid method is then tested and verified by modeling a planar spiral inductor and a microstrip interdigital capacitor in
Section 3. A brief conclusion is given in
Section 4.
2. Hybrid Optimization Method
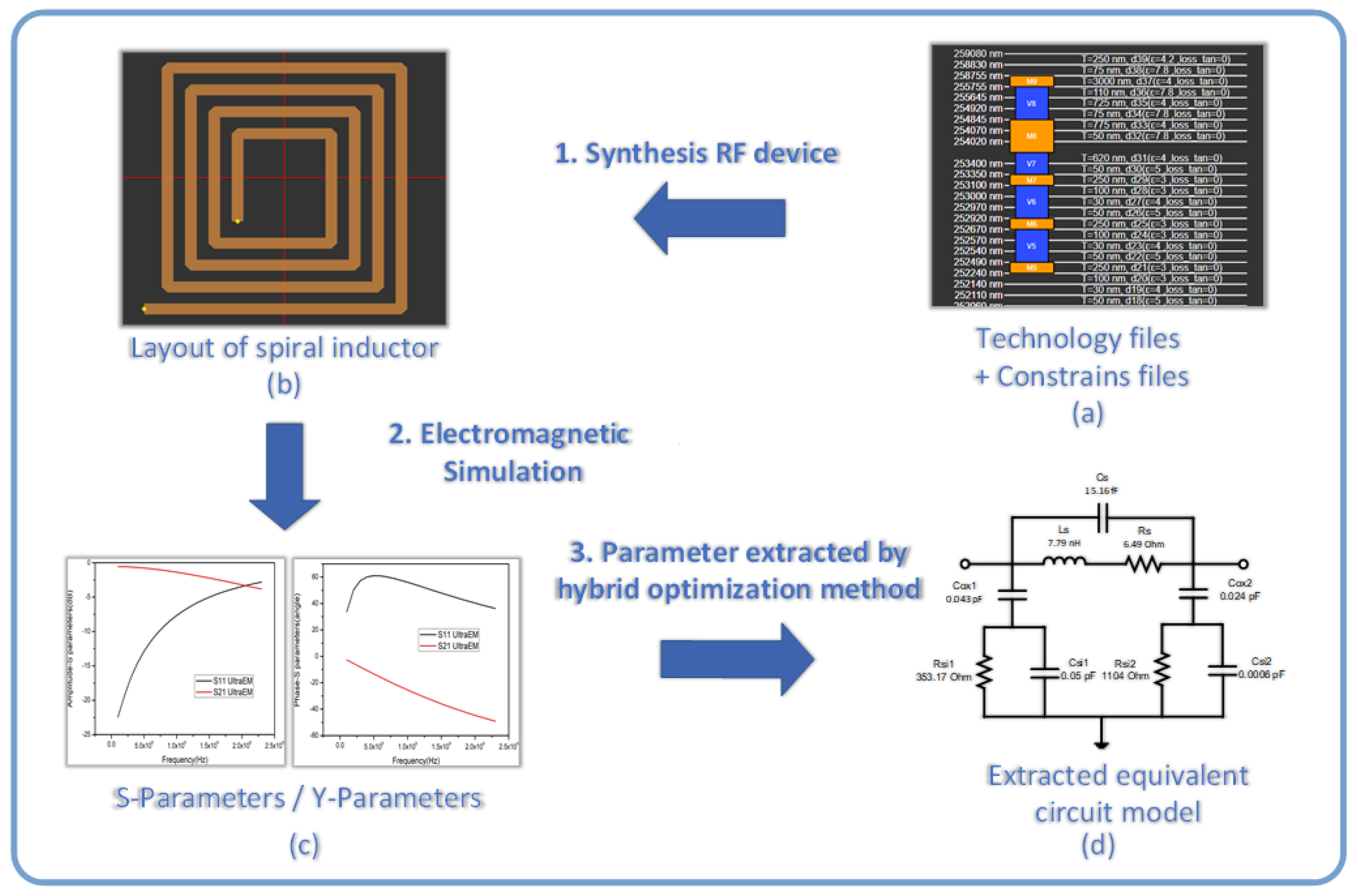
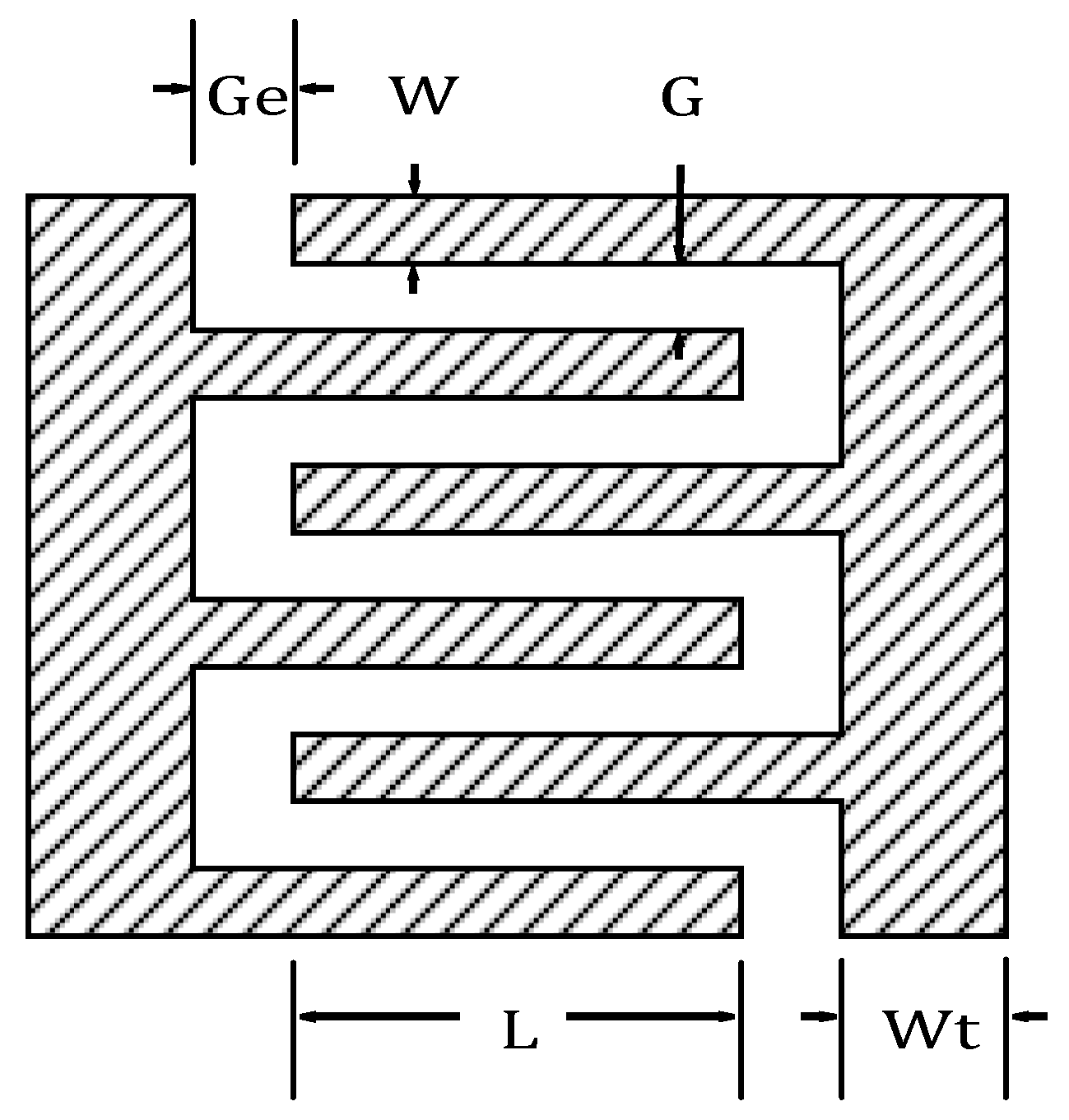
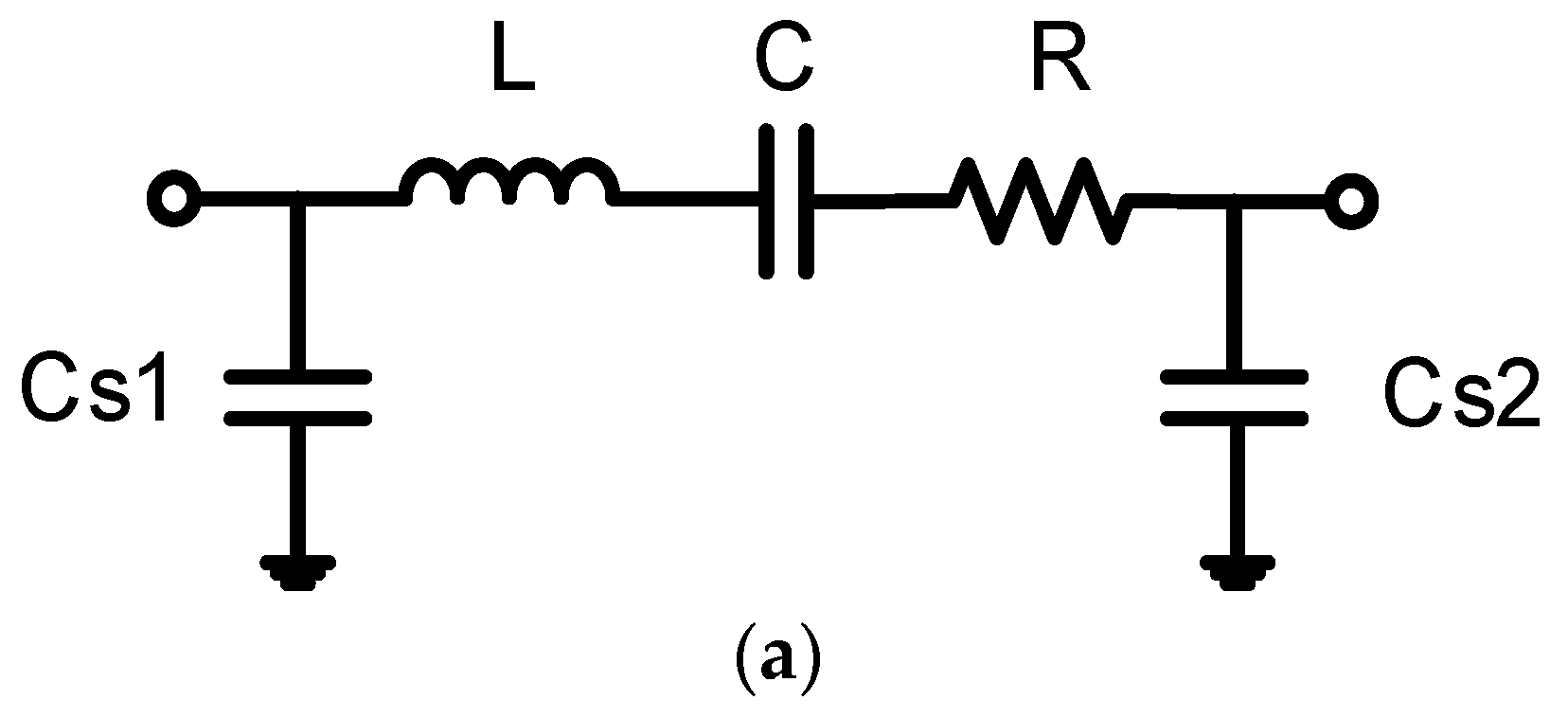
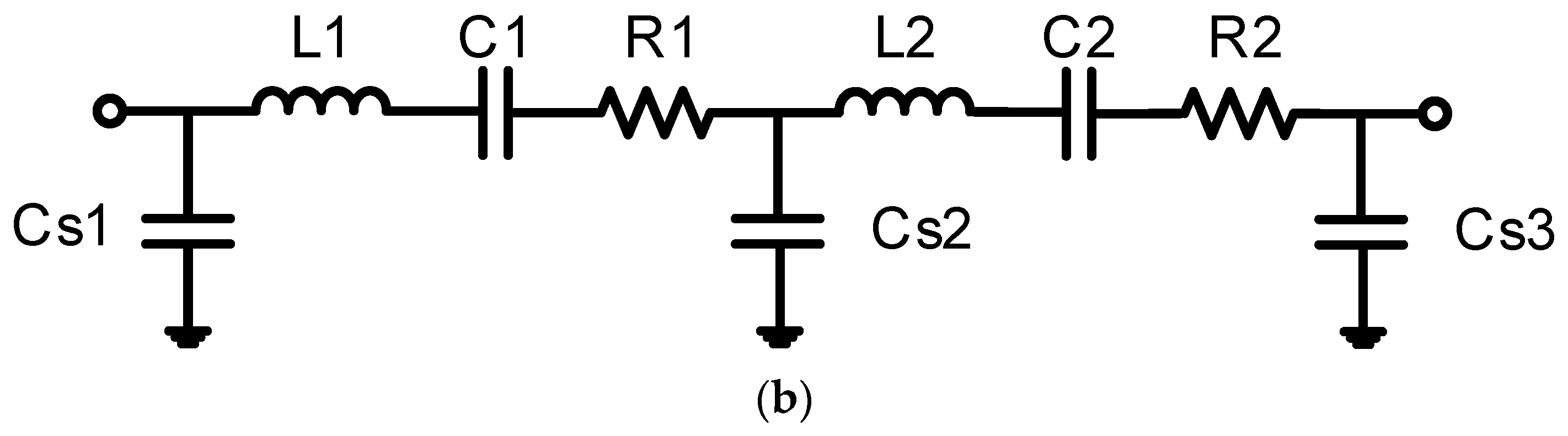
The proposed hybrid optimization method can be applied for modelling components of RFICs. For example, as shown in
Figure 1, the layout of a planar spiral inductor is synthesized using technique files, constrains files and so on. The EM simulation results (
Figure 1c) of the planar spiral inductor is used as the target of the equivalent circuit. The value of every equivalent circuit (
Figure 1d) element is able to be extracted from the proposed method effectively, and the model of the equivalent circuit can be applied for circuit design.
The process of the proposed hybrid GA–Powell’s method can be divided into two parts: global search process and local optimization process.
2.1. Global Search Process
GA is able to search in multiple regions among a solution space simultaneously. Thus, it reduces the possibility of the algorithm falling into local minima, and makes the GA have better global search ability.
Roulette wheel selection [
21] is herein used as the selection method of GA. Assuming the population size is
N and the fitness of the individual
is
f(
), the probability of selection of individual
is defined as:
and the cumulative probability is calculated by:
Then, a random number r with a uniform distribution of 0–1 is generated. If , the individual is selected to enter a new group of the next generation. This process will be repeated until the number of individuals in the new group is equal to the size of the parent group.
The crossover process [
22] is based on the following two formulas:
where
and
are individuals after the crossover process,
and
are two individuals randomly selected, and
α is a constant of the crossover with a value between 0 and 1 (
is herein set as 0.8).
The mutation process [
23] is based on:
where
is the individual after the mutation,
is the individual before the mutation,
k is a constant of the variation with a value between 0 and 1 (herein,
k is set as 0.1 to maintain the diversity of population),
is the upper limit of the individual,
is the lower limit of the individual, and
r is a random number. Note that
pick is a random number with a uniform distribution in the range of 0 to 1. When
pick > 0.5, choose the first formula; when
pick 0.5, choose the second formula [
24].
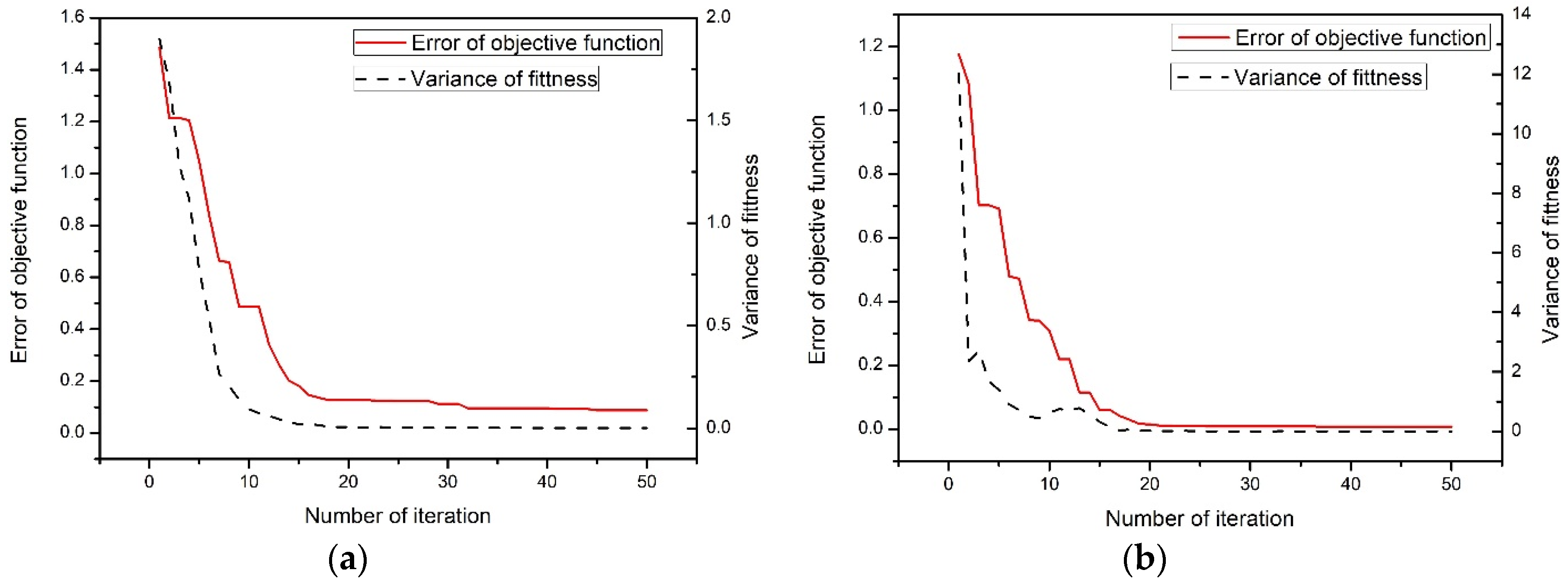
With the iterations of GA, the solution can gradually converge to the global minimum. To accelerate the convergence, a local optimization process is applied when the convergence rate of GA slows down. To determine when to start the local optimization process, the variance of the fitness of population is defined as:
When the optimization converges to an optimum solution, the variance of the fitness for a population is small. Otherwise, the population is scattered in the solution space, and the variance of the fitness is large. When the variance of the fitness is small, the convergence rate consequently slows down, in which it may take many iterations for the mutation process of GA to generate a new individual that has a better fitness than the previous generations. Hence, the local optimization is applied, once the variance of the fitness defined by Equation (5) is small. The CG search method is the most effective way to solve a local optimization problem.
2.2. Local Optimization Process
After global search of GA, the individual with best fitness is chosen as starting point of Powell’s method, which is defined as .
- (1)
Set an optional initial point
, and set the convergence thresholds as
(herein,
and
are both set as 1 × 10
−4). Use the initial basic direction group as the unit coordinate vector, which can be defined as:
where
is the
i-th unit coordinate vector, and
represent the
i-th search direction, and
k denotes the
k-th iteration round.
- (2)
Implement one-dimensional search along
(
i = 1, 2, …,
n), and generate
(
i = 1, 2, …,
n) from
(
i = 1, 2, …,
n) at each direction search. The final point
will make the function of
have the minimum value. Construct a new search direction:
Then, perform a one-dimensional search in direction to generate a minimum point .
- (3)
If
or
stop the iteration and export the optimal solution
and
f(
). Otherwise, go to step 4.
- (4)
Calculate
where
m denotes the corresponding index at which
−
is the maximum one among
−
. Then, the direction that contributes the most in the
k-th iteration round is:
- (5)
To ensure that the search direction group for each iteration is linearly independent, it is needed to determine whether the original search direction group can be directly used as the search direction group in the next iteration.
Firstly, determine mapping points:
then calculate
and set:
If
<
and
go to step 6, and replace the most contributing search direction from Equation (12) with the new search direction. Otherwise, go to step 7.
- (6)
Set the starting point and the search direction group of the (
k + 1)-th iteration as follows:
and replace the most contributing search direction
with the new search direction
. Then, set
k =
k + 1 and go to step 2.
- (7)
Set the starting point and the search direction group of the (k + 1)-th iteration as follows:
Set
k =
k + 1, and go to step 2 [
14].
After the local optimization process, the solution is able to converge to an appropriate and accurate global minimum. This hybrid method combines the advantages of the global search ability of GA and the high accuracy and fast convergence of Powell’s method in the local search.
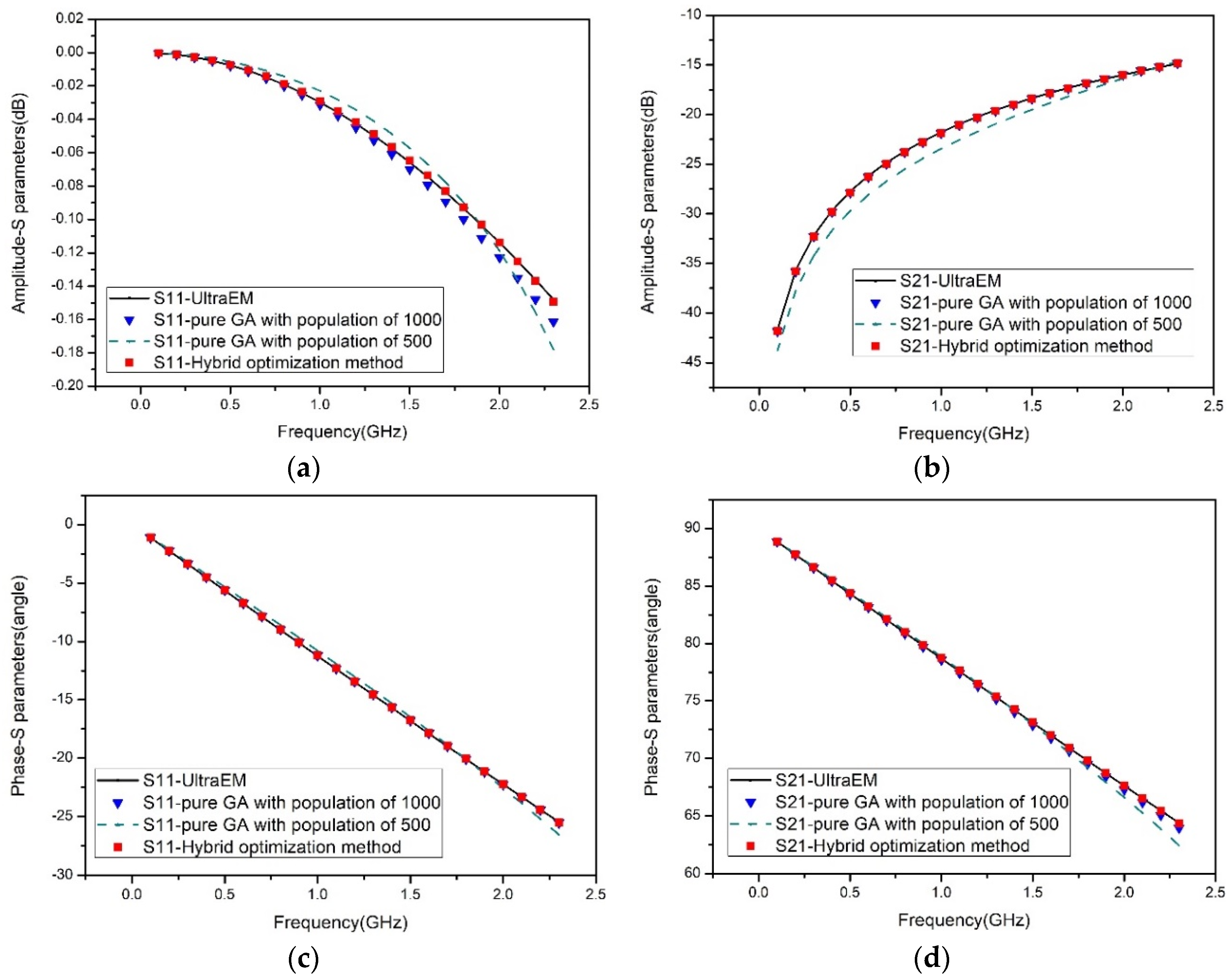
2.3. RF Device Modeling
The modeling process is shown in
Figure 2. The full-wave simulation result of the layout of an RF component is obtained by UltraEM
®, and the corresponding Y-parameters are labeled as
. By using a Spice simulator, the Y-parameters of the equivalent circuit can be obtained from the calculated port voltage and current, viz:
where
Y is an
N ×
N matrix, and
V and
I are the port voltage vector and the port current vector, respectively. The entry of the
Y-matrix is defined as:
If the voltage of the excited port is set as 1 volt, the Y-parameters are equal to the port currents, viz:
Label the Y-parameters simulated from the equivalent circuit as
. In order to fit the result of the equivalent circuit with the accurate EM simulation, the objective function to be optimized can be defined as:
where
N is the port number of the device;
fs and
fe represent the start and the end frequencies of simulation, respectively. To verify the effect of the method proposed in
Section 2, a planar spiral inductor and a microstrip interdigital capacitor were tested.
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}