Insight on Electronic Travel Aids for Visually Impaired People: A Review on the Electromagnetic Technology



Abstract
:1. Introduction
- 1)
- Detection of obstacles from ground level to height of the head;
- 2)
- Information about the travel surface;
- 3)
- Detection of objects bordering the travel path for shore-lining and projection;
- 4)
- Distant object and cardinal direction information for the projection of a straight line;
- 5)
- Location of landmarks and identification information;
- 6)
- Information for enhancing self-familiarization and for creating a mental map of the environment.
- The radiation pattern can be tailored by modifying the design of the antennas, thus accurately detecting small apertures or suspended obstacles.
2. Electromagnetic Aids for Visually Impaired and Blind People
3. Discussion
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Bourne, R.R.A.; Flaxman, S.R.; Braithwaite, T.; Cicinelli, M.V.; Das, A.; Jonas, J.B.; Keeffe, J.; Kempen, J.H.; Leasher, J.; Limburg, H.; et al. Magnitude, temporal trends, and projections of the global prevalence of blindness and distance and near vision impairment: A systematic review and meta–analysis. Lancet Glob. Health 2017, 5, 888–897. [Google Scholar] [CrossRef]
- Corcoran, C.; Douglas, G.; Pavey, S.; Fielding, A.; McCall, S.; McLinden, M. Network 1000: The changing needs and circumstances of visually impaired people: A project overview. Br. J. Vis. Impair. 2004, 22, 93–100. [Google Scholar] [CrossRef]
- Velazquez, R. Wearable assistive devices for the blind. In Wearable and Autonomous Biomedical Devices and Systems for Smart Environment; Lecture Notes in Electrical Engineering; Springer International Publishing: New York, NY, USA, 2010; Volume 75, pp. 331–349. [Google Scholar]
- Paiva, S. Technological Trends in Improved Mobility of the Visually Impaired, 1st ed.; Springer International Publishing: New York, NY, USA, 2020. [Google Scholar]
- Islam, M.M.; Sadi, M.S.; Zamli, K.Z.; Ahmed, M.M. Developing walking assistants for visually impaired people: A review. IEEE Sens. J. 2019, 19, 2814–2828. [Google Scholar] [CrossRef]
- Bai, J.; Liu, Z.; Lin, Y.; Li, Y.; Lian, S.; Liu, D. Wearable travel aid for environment perception and navigation of visually impaired people. Electronics 2019, 8, 697. [Google Scholar] [CrossRef]
- Blasch, B.B.; Wiener, W.R.; Welsh, R.L. Foundations of Orientation and Mobility, 3nd ed.; AFB Press: New York, NY, USA, 2010. [Google Scholar]
- National Research Council. Electronic Travel Aids: New Directions for Research; Nat. Acad. Press: Washington, DC, USA, 1986. [Google Scholar]
- Roentgen, U.R.; Gelderblom, G.J.; Soede, M.; De Witte, L. Inventory of electronic mobility aids for visually impaired persons—A literature review. J. Vis. Impair. Blind. 2008, 102, 702–724. [Google Scholar] [CrossRef]
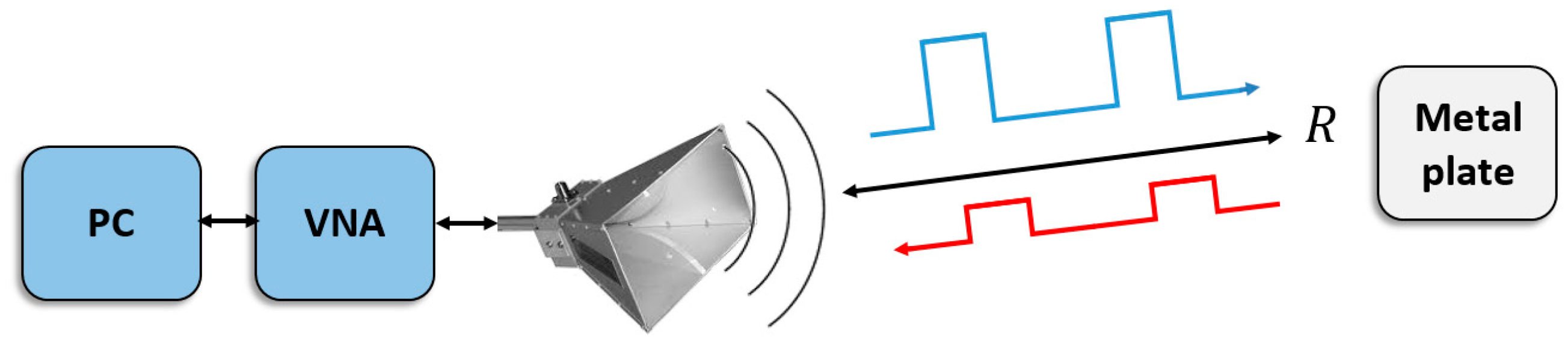
- Di Mattia, V.; Scalise, L.; Petrini, V.; Russo, P.; De Leo, A.; Pallotta, E.; Mancini, A.; Zingaretti, P.; Cerri, G. Electromagnetic technology for a new class of electronic travel aids supporting the autonomous mobility of visually impaired people. Sensors 2017, 17, 364. [Google Scholar]
- Patil, K.; Jawadwala, Q.; Shu, F.C. Design and construction of electronic aid for visually impaired people. IEEE Trans. Hum. Mach. Syst. 2018, 48, 172–182. [Google Scholar] [CrossRef]
- Zhou, D.; Yang, Y.; Yan, H. A smart ‘virtual eye’ mobile system for the visually impaired. IEEE Potentials 2016, 35, 13–20. [Google Scholar] [CrossRef]
- Sohl–Dickstein, J.; Teng, S.; Gaub, B.M.; Rodgers, C.C.; Li, C.; DeWeese, M.R.; Harper, N.S. A device for human ultrasonic echolocation. IEEE Trans. Biomed. Eng. 2015, 62, 1526–1534. [Google Scholar] [CrossRef]
- Bhatlawande, S.; Mahadevappa, M.; Mukherjee, J.; Biswas, M.; Das, D.; Gupta, S. Design, development, and clinical evaluation of the electronic mobility cane for vision rehabilitation. IEEE Trans. Neural Syst. Rehabil. Eng. 2014, 22, 1148–1159. [Google Scholar] [CrossRef]
- Bai, J.; Lian, S.; Liu, Z.; Wang, K.; Liu, D. Virtual–blind–road following–based wearable navigation device for blind people. IEEE Trans. Consum. Electron. 2018, 64, 136–143. [Google Scholar] [CrossRef]
- Kang, M.-C.; Chae, S.-H.; Sun, J.-Y.; Lee, S.-H.; Ko, S.-J. An enhanced obstacle avoidance method for the visually impaired using deformable grid. IEEE Trans. Consum. Electron. 2017, 63, 169–177. [Google Scholar] [CrossRef]
- Yang, K.; Wang, K.; Hu, W.; Bai, J. Expanding the detection of traversable area with realsense for the visually impaired. Sensors 2016, 10, 1954. [Google Scholar] [CrossRef] [PubMed]
- Cardillo, E.; Caddemi, A. Feasibility study to preserve the health of an Industry 4.0 worker: A Radar System for Monitoring the Sitting-Time. In Proceedings of the IEEE International Workshop on Metrology for Industry 4.0 and IoT, Naples, Italy, 4–6 June 2019. [Google Scholar]
- Kwiatkowski, P.; Jaeschke, T.; Starke, D.; Piotrowsky, L.; Deis, H.; Pohl, N. A Concept Study for a Radar-Based Navigation Device with Sector Scan Antenna for Visually Impaired People. In Proceedings of the IEEE MTT–S International Microwave Bio Conference (IMBIOC), Gothenburg, Sweden, 15–17 May 2017. [Google Scholar]
- Kiuru, T.; Metso, M.; Utriainen, M.; Metsavainio, K.; Jauhonen, H.M.; Rajala, R.; Savenius, R.; Strom, M.; Jylha, T.N.; Juntunen, R.; et al. Assistive device for orientation and mobility of the visually impaired based on millimeter wave radar technology—Clinical investigation results. Cogent Eng. 2018, 5, 1–12. [Google Scholar] [CrossRef]
- Pisa, S.; Pittella, E.; Piuzzi, E. Serial patch array antenna for an FMCW radar housed in a white cane. Int. J. Antennas Propag. 2016, 2016, 9458609. [Google Scholar] [CrossRef]
- Di Mattia, V.; Manfredi, G.; De Leo, A.; Russo, P.; Scalise, L.; Cerri, G.; Caddemi, A.; Cardillo, E. A Feasibility Study of a Compact Radar System for Autonomous Walking of Blind People. In Proceedings of the International Forum on Research and Technologies for Society and Industry Leveraging a Better Tomorrow (RTSI), Bologna, Italy, 7–9 September 2016. [Google Scholar]
- Cardillo, E.; Di Mattia, V.; Manfredi, G.; Russo, P.; De Leo, A.; Caddemi, A.; Cerri, G. An electromagnetic sensor prototype to assist visually impaired and blind people in autonomous walking. IEEE Sens. J. 2018, 18, 2568–2576. [Google Scholar] [CrossRef]
- Long, N.; Wang, K.; Cheng, R.; Hu, W.; Yang, K. Unifying obstacle detection, recognition, and fusion based on millimeter wave radar and RGB–depth sensors for the visually impaired. Rev. Sci. Instrum. 2019, 90, 1–12. [Google Scholar] [CrossRef]
- Long, N.; Wang, K.; Cheng, R.; Yang, K.; Hu, W.; Bai, J. Assisting the visually impaired: Multitarget warning through millimeter wave radar and RGB–depth sensors. J. Electron. Imag. 2019, 28, 1–15. [Google Scholar] [CrossRef]
- Cardillo, E.; Caddemi, A. A novel approach for crosstalk minimization in FMCW radars. Electron. Lett. 2017, 53, 1379–1381. [Google Scholar] [CrossRef]
- Caddemi, A.; Cardillo, E. A Study on Dynamic Threshold for the Crosstalk Reduction in Frequency-Modulated Radars. In Proceedings of the Computing and Electromagnetics International Workshop (CEM), Barcelona, Spain, 21–24 June 2017. [Google Scholar]
- Pozar, D.M. Microwave Engineering, 4th ed.; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 2011. [Google Scholar]
- Caddemi, A.; Cardillo, E. A low-cost smart microwave radar for short range measurements. In International Conference on Applications in Electronics Pervading Industry, Environment and Society; Springer International Publishing: New York, NY, USA, 2018; Volume 512, pp. 41–47. [Google Scholar]
- Scalise, L.; Mariani Primiani, V.; Russo, P.; Shahu, D.; Di Mattia, V.; De Leo, A.; Cerri, G. Experimental investigation of electromagnetic obstacle detection for visually impaired users: A comparison with ultrasonic sensing. IEEE Trans. Instrum. Meas. 2012, 61, 3047–3057. [Google Scholar] [CrossRef]
- Richards, M.A.; Scheer, J.A.; Holm, W.A. Principles of Modern Radar: Basic Principle; SciTech Publishing: Atlanta, GA, USA, 2010. [Google Scholar]
- Di Mattia, V.; Russo, P.; De Leo, A.; Mariani Primiani, V.; Petrini, V.; Cerri, G.; Scalise, L. An electromagnetic device for autonomous mobility of visually impaired people. In Proceedings of the European Microwave Conference, Rome, Italy, 6–9 October 2014. [Google Scholar]
- Pieralisi, M.; Petrini, V.; Di Mattia, V.; Manfredi, G.; De Leo, A.; Scalise, L.; Russo, P.; Cerri, G. Design and realization of an electromagnetic guiding system for blind running athletes. Sensors 2015, 15, 16466–16483. [Google Scholar] [CrossRef] [PubMed]
- EM System to Guide Visually Impaired Running Athletes. Available online: https://www.youtube.com/watch?v=GIyQDu0nOww (accessed on 30 September 2019).
- Hicks, S.L.; Wilson, I.; Van Rheede, J.J. Improved mobility with depth–based residual vision glasses. Invest. Ophthalmol. Vis. Sci. 2014, 55, 2153. [Google Scholar]
- Grant, P.; Spencer, L.; Arnoldussen, A. The Functional Performance of the BrainPort V100 Device in Persons Who Are Profoundly Blind. J. Vis. Impair. Blind. 2016, 110, 77–88. [Google Scholar] [CrossRef]
- Hersh, M.; Johnson, M.A. Assistive Technology for Visually Impaired and Blind People; Springer: London, UK, 2008. [Google Scholar]
- Dakopoulos, D.; Bourbakis, N.G. Wearable Obstacle Avoidance Electronic Travel Aids for Blind: A Survey. IEEE Trans. Syst. Man Cybern. Part C Appl. Rev. 2009, 40, 25–35. [Google Scholar] [CrossRef]
- Liu, W.; Anguelov, D.; Erhan, D.; Szegedy, C.; Reed, S.; Fu, C.Y.; Berg, A.C. SSD: Single Shot MultiBox Detector. In ECCV 2016: Computer Vision—ECCV 2016; Lecture Notes in Computer Science; Springer International Publishing: New York, NY, USA, 2016; Volume 9905, pp. 21–37. [Google Scholar]
- He, K.; Gkioxari, G.; Dollar, P.; Girshick, R. Mask R-CNN. In Proceedings of the IEEE International Conference on Computer Vision, Venice, Italy, 22–29 October 2017. [Google Scholar]
- Lesecq, S.; Foucault, J.; Birot, F.; De Chaumont, H.; Jackson, C.; Correvon, M.; Heck, P.; Banach, R.; Di Matteo, A.; Di Palma, V.; et al. INSPEX: Design and integration of a portable/wearable smart spatial exploration system. In Proceedings of the 2017 Design, Automation & Test in Europe Conference & Exhibition, Lausanne, Switzerland, 27–31 March 2017. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Ref. | Working Principle | Maximum Range (m) | Cost | Size | Spatial Resolution (cm) | Operating Frequency (GHz) | Final Prototype |
|---|---|---|---|---|---|---|---|
| [32] | VNA-based | 3 | High | Bulky | 12 | 4.0–6.0 | No |
| [19] | Radar | 5 | Medium | Bulky | 6 | 80.0–84.0 | No |
| [20] | Radar | 3.5 | Low | Small | ND | 24.0 | No |
| [21] | Radar | 5 | Low | Small | 60 | 24.0–24.25 | No |
| [23] | Radar | 5 | Low | Small | 14 | 24.0–25.1 | No |
| [24] | Radar + RGB | 12 | Low | Medium | 6 | 77.0–81.0 | No |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cardillo, E.; Caddemi, A. Insight on Electronic Travel Aids for Visually Impaired People: A Review on the Electromagnetic Technology. Electronics 2019, 8, 1281. https://doi.org/10.3390/electronics8111281
Cardillo E, Caddemi A. Insight on Electronic Travel Aids for Visually Impaired People: A Review on the Electromagnetic Technology. Electronics. 2019; 8(11):1281. https://doi.org/10.3390/electronics8111281
Chicago/Turabian StyleCardillo, Emanuele, and Alina Caddemi. 2019. "Insight on Electronic Travel Aids for Visually Impaired People: A Review on the Electromagnetic Technology" Electronics 8, no. 11: 1281. https://doi.org/10.3390/electronics8111281
APA StyleCardillo, E., & Caddemi, A. (2019). Insight on Electronic Travel Aids for Visually Impaired People: A Review on the Electromagnetic Technology. Electronics, 8(11), 1281. https://doi.org/10.3390/electronics8111281