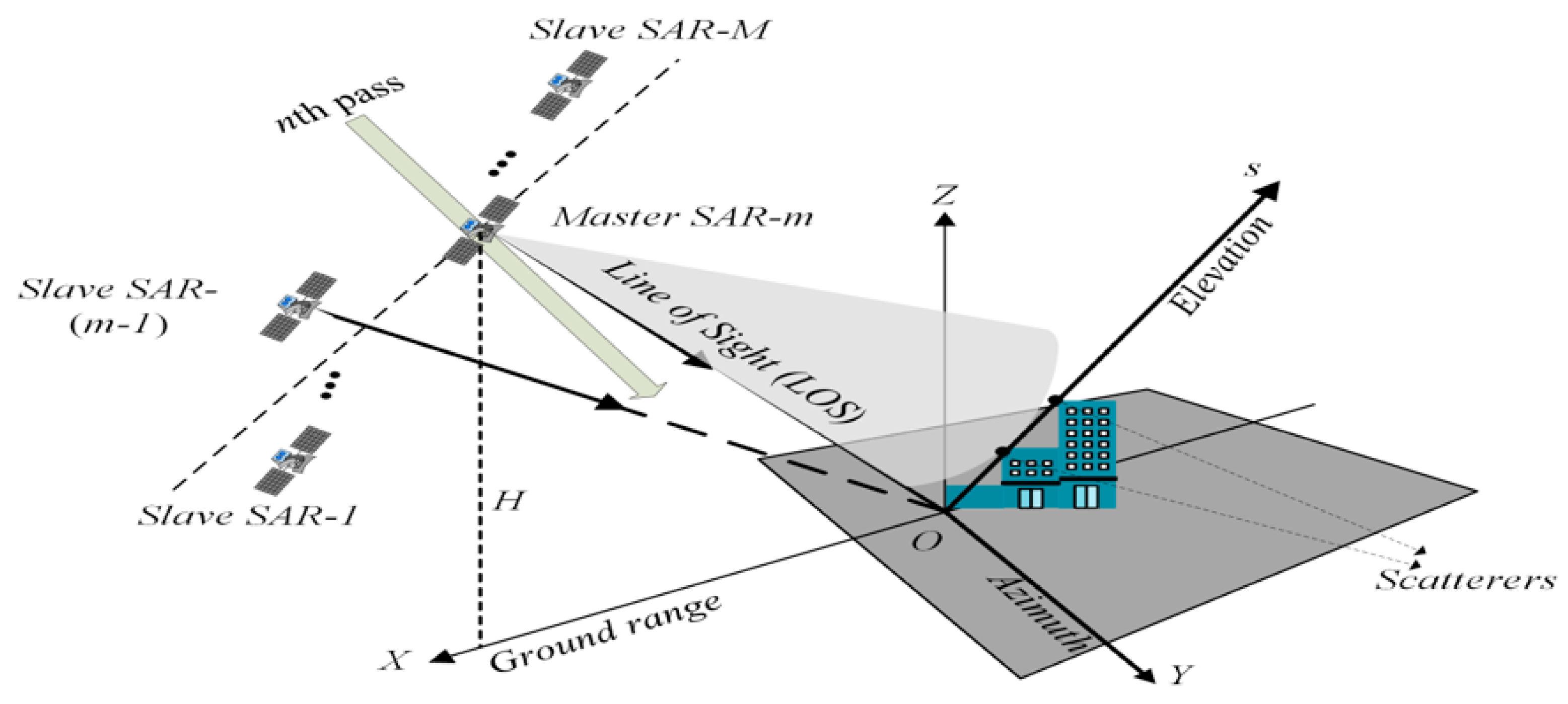
In this section, simulation experiments are carried out to verify the effectiveness of the proposed model and algorithm. In the following experiments, two sets of combined acquisitions were acquired to retrieve the 3-D deformation by using the pursuit monostatic mode of a bistatic SAR system through repeat-passes [
31]. In order to be more realistic, the system parameters of TanDEM-X are introduced here for the simulation of bistatic SAR system in this paper, and the system parameters for each SAR sensor are shown in
Table 2. The experiments in this section were composed of two parts; the first part was the numerical simulation experiment for point targets, and the second one was the validation performance for the scene target using the semi-real data.
4.1. Numerical Simulation for Point Target
In this part, the point targets simulation was performed to verify the effectiveness of the proposed improved D-TomoSAR model, and the accuracy of the 3-D deformation retrieval was analyzed. To this end, we assumed that there were a total of three scatterers located in a same slant range-azimuth resolution cell along the elevation direction. The scatterers’ elevations and the 3-D deformation velocities in East-West, North-South, and Up-Down directions are listed in
Table 3. Accordingly, the corresponding scatterers’ 3-D deformation velocities in slant range, azimuth, and elevation directions under the case of squint imaging mode can be calculated, which is also listed in
Table 3. The Gaussian random noise with a mean value of zero and a standard deviation of 1 cm/year was added to the 3-D deformation velocities of each scatterer for realistic purpose. Previous results show that the combined data for the 3-D deformation retrieval needed to be acquired by the 2-D imaging of SAR. However, due to the existence of the squint angle, the conventional focusing algorithm for the side-looking SAR could not be applied to the squint mode SAR imaging directly. At this point, the algorithm in [
32] was adopted to achieve the 2-D SAR imaging. This algorithm could still provide a stable 2-D focusing performance with a squint angle of 65 degrees, which meets the requirement of the 2-D imaging with squint mode in this paper. To approach the real imaging environment, the signal received by the SAR system was added by Gaussian noise with SNR = 5 dB in this experiment.
To retrieve the 3-D deformation parameters of scatterers, two SAR sensors in
Table 2 were used through 30 repeat-passes to achieve two stacks of combined SAR acquisitions with different squint angles. Subsequently, the scatterers’ elevation
s and the deformation parameters
and
in (19) could be estimated by the 2-D PHAF with the RELAX algorithm for each combined SAR acquisition. The estimated results are shown in
Figure 5a,b. Finally, the estimation of 3-D deformation components in the slant range, azimuth, and elevation directions could be obtained by using the weighted least squares method to solve (21), and the retrieved results are summarized in
Table 4. The experimental results show that the estimations of the 3-D deformation in three directions were very close to the real values. The estimation error was less than 0.5 cm/year in the slant range and the elevation direction and was no more than 1 cm/year in the azimuth direction. Although the accuracy of deformation estimation in azimuth direction was inferior to the other two directions, the proposed method still achieved a great improvement in accuracy of retrieval for the azimuth direction deformation compared with the traditional method. This proves the effectiveness of the proposed improved D-TomoSAR model, which provides a feasible solution to the realization of estimations of the 3-D deformation. Furthermore, once the 3-D deformation components along the slant range, azimuth, and elevation direction were estimated, the corresponding deformation parameters in North-South, East-West, and Up-Down directions could be calculated by (25), as shown in
Table 5.
Furthermore, in order to illustrate the advantages of the proposed algorithm, the above estimation results were compared with the motion decomposition method [
8]. In the following comparative simulation, three sets of SAR acquisitions were used to retrieve the 3-D deformation components. The parameters of SAR satellites shown in Table 1 of [
8] were adopted for this experiment, as shown in
Table 6.
First, three sets of SAR acquisitions for the D-TomoSAR processing were obtained by the three satellites in
Table 6 through 30 repeat-passes. Then, the sparse reconstruction algorithm was used to estimate the LOS deformation velocities for each set of SAR acquisitions. As a result, three LOS deformation observations from different acquisition geometries were obtained, and the reconstructed elevations and deformation velocities for the three sets of SAR acquisitions are shown in
Figure 6. The estimations of deformation velocity along LOS are listed in
Table 7. Subsequently, the L1-norm minimization algorithm in [
8] was used to decompose the LOS observations to achieve the 3-D deformation components, and the estimated results are summarized in
Table 8.
As can be seen from the comparison of
Table 5 and
Table 8, the flight directions of the satellites were almost parallel to the North-South direction owing to the SAR satellites operating in the near-polar orbit. Thus, the method of motion decomposition was insensitive to the North-South deformation retrieval, which led to a large estimation error. As mentioned by the authors of [
8], precise unambiguous retrieval of the North-South component is not possible when only using the geometry configuration of current SAR satellites. The experimental results of the above simulation also draw the same conclusion. Therefore, the feasibility of the proposed algorithm in this paper for retrieving the 3-D deformation components was further verified by the analysis of the compared experiment.
According to
Table 4, the estimation errors were not very small, especially for
. Nevertheless, the accuracy of the estimation in the azimuth (North-South) direction also greatly improved compared with the motion decomposition method [
8] shown in
Table 8. In addition, compared with the decomposition method, the proposed algorithm only needed two sets of SAR acquisitions with different oblique angles without changing the orbit of the SAR satellite, which is conducive to practical application. On the other hand, as can be seen from
Table 1 and
Figure 4, the higher diversity of the squint angles between the two sets of SAR acquisitions, the more precise the deformation estimation in North-South was. In the above simulation, the estimated results of
Table 4 were obtained by using the SAR acquisitions with squint angles of 5 degrees and 21.3 degrees, respectively. In order to further improve the accuracy of the deformation estimation in the azimuth direction, it is necessary to increase the diversity of the squint angles between the two sets of SAR acquisitions. To illustrate this point, an additional experiment was performed. The parameters used in this experiment were similar to those in
Table 2, except that the squint angle of Satellite 2 increased from 21.3 degrees to 45 degrees. Then, the same simulation scenario was adopted, and the estimation results of the 3-D deformation in the slant range, azimuth, and elevation directions are shown in
Table 9. The experimental results show that the accuracy of the deformation estimation in the azimuth direction improved with the increase in the diversity of the squint angles, which verifies the correctness of the above conclusions.
In addition, we set the variation of the SNR of SAR imaging in the range of [−10 dB, 15 dB] to evaluate the effect of noise on the elevation and the 3-D deformation retrieval. For each SNR, 250 simulations were performed. The parameters of scatterers are shown in
Table 2.
Figure 7 presents the three scatterers’ average estimation errors of elevation and 3-D deformation velocities as a function of the SAR imaging SNR, showing the performance improvement of the estimation when increasing the SNR of SAR imaging. For SNR = 5dB, the average error of elevation estimation was less than 0.4 m, and the error of deformation velocity estimations were no more than 0.5 cm/year in the slant range and elevation directions. The error of deformation estimation in the azimuth direction was larger than that in the other two directions due to the inadequate angular diversity of the squint angles used in the two combined acquisitions.
Table 10 summarizes the elevation and 3-D deformation retrieval in the different SNRs. The experimental results show that the elevation and 3-D deformation velocities could be still estimated accurately and robustly by the proposed algorithm at a low SNR.
4.2. Experiment with Semi-Real Data
In this part, an experiment was performed to verify the effectiveness of the proposed method for the scene target by using the semi-real data. In this experiment, we used Giorgio Franceschetti’s method [
33] to generate the SAR raw data. The digital elevation model (DEM) data provided by Shuttle Radar Topography Mission (SRTM) were used as the terrain data, as shown in
Figure 8a, and the deformation velocity maps in slant range, azimuth, and elevation directions were simulated in the corresponding scene, respectively, as shown in
Figure 8b–d. The parameters of SAR systems are shown in
Table 2.
Figure 9a illustrates one of the semi-real SAR images as an example. The elevation and deformation parameters are estimated by the proposed algorithm, and the results are as follows:
Figure 9b is the estimation of elevation;
Figure 9c–e are the estimations of deformation velocities in slant range, azimuth, and elevation directions, respectively. It can be seen that the estimated deformation in the three directions had the same trend as the real deformation map. The black line in
Figure 9b shows the position of the analysis slice, and the estimation errors of 3-D deformation velocities for the scatterers located in this line are presented in
Figure 10. Similar to the experimental results in the previous sub-section, the estimation errors in the slant range and elevation direction were also no more than 0.5 cm/year, and the accuracy of deformation retrieval in the azimuth direction was worse than that in the other two directions. Nevertheless, according to
Figure 4b, the accuracy of the estimation in the azimuth direction could be improved by increasing the angular diversity of the squint angles used in the two combined acquisitions. Experimental results show the potential of the proposed algorithm for the reconstruction of the elevation and deformation parameters from the full SAR image.
In the above experiment with semi-real data, the DEM data were used to generate the SAR raw data in a natural scene, and the layover phenomenon was ignored. However, the D-TomoSAR was mainly applied to monitor the scenario with layover phenomenon such as urban areas and forests. Therefore, a semi-real SAR raw data of the urban area was simulated to further verify the effectiveness of the proposed algorithm. The DEM data of Shanghai was adopted to simulate the urban scene in this experiment, as shown in
Figure 11. The red box in
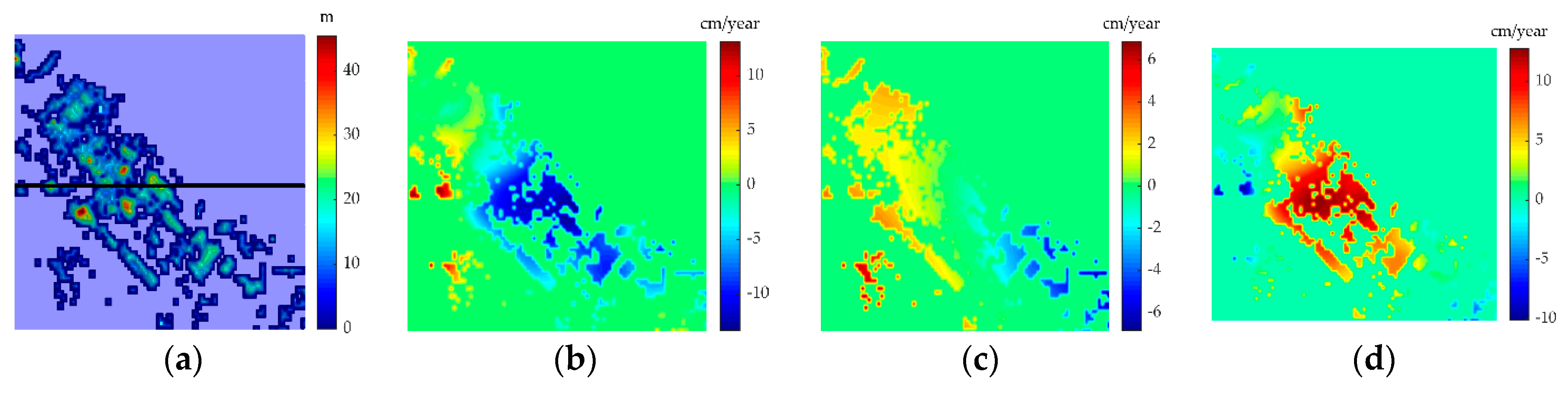
Figure 11 is the region of interest (ROI), which contains some buildings. Thus, the layover phenomenon occurs when imaging for the ROI. Assuming that each slant range-azimuth resolution cell of the SAR image in the ROI contains two scatterers, we call them the dominant scatterer and the secondary scatterer. Accordingly, the elevation and deformation maps of the ROI are simulated, shown as in
Figure 12, where
Figure 12a,e are the elevation of dominant scatterer and secondary scatterer, respectively.
Figure 12b–d show the deformation velocities of the dominant scatterer along the slant range, azimuth, and elevation directions respectively, while
Figure 12f–h correspond to the secondary scatterer.
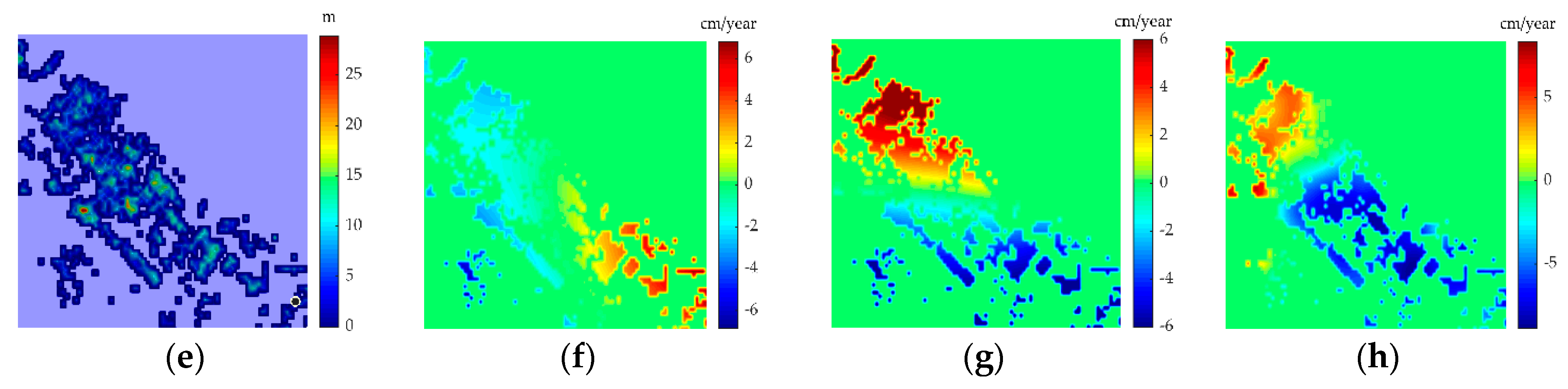
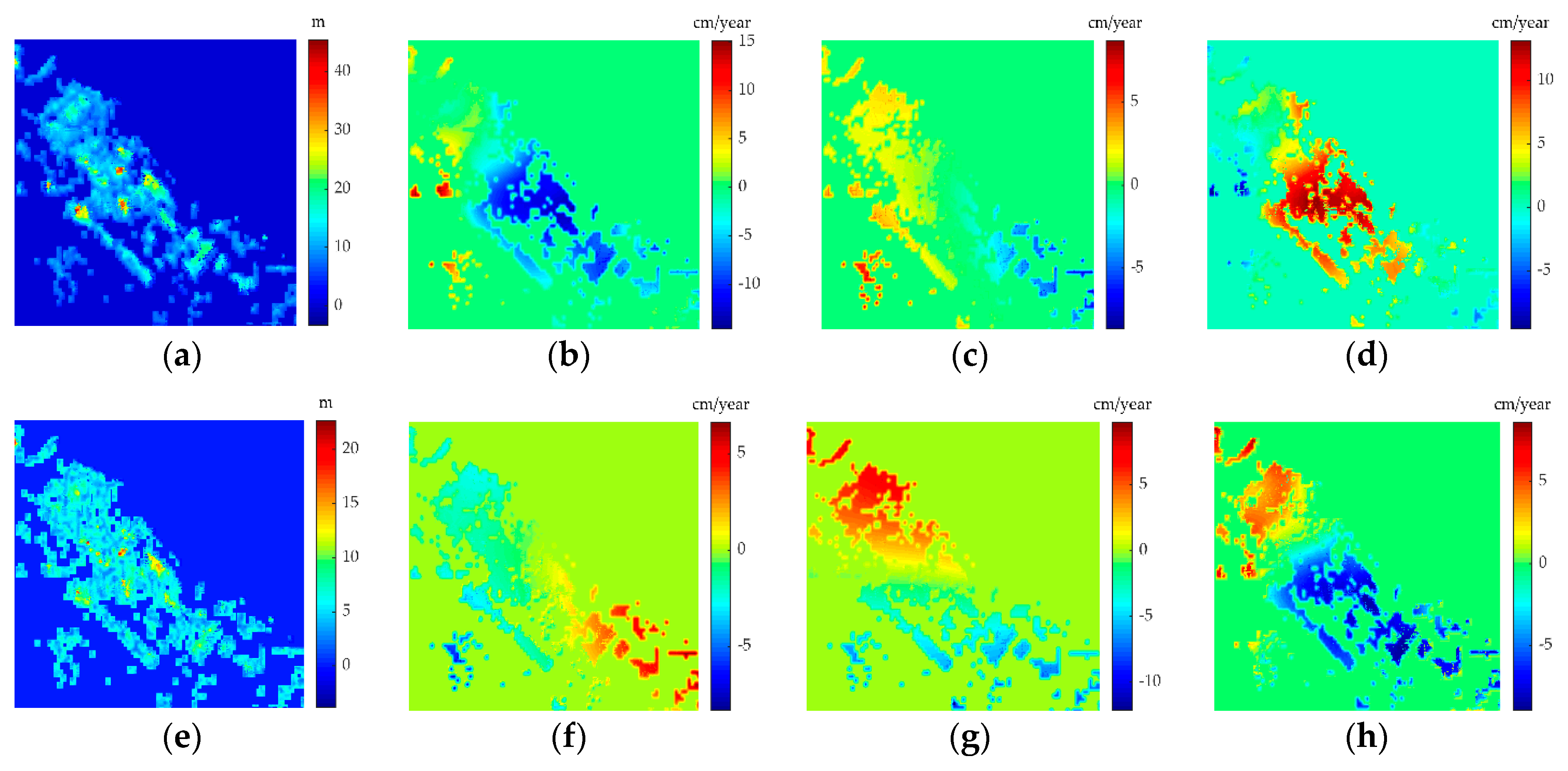
The proposed algorithm was used to estimate the elevation and the deformation velocity of the ROI, and the estimation results are shown in
Figure 13. It can be seen from the experimental results that the estimated elevation and the 3-D deformation velocities of the dominant scatterer and secondary scatterer had the same trend as the true values. Similarly, the estimation errors of elevation and deformation velocity of scatterers located at the slice in
Figure 12a were calculated, as shown in
Figure 14. The experimental results show that the estimation results were consistent with our expectation, which validates the ability of the proposed algorithm to retrieve the elevation and 3-D deformation parameters in the scenario with layover phenomenon.

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}