A Vehicle Type Dependent Car-following Model Based on Naturalistic Driving Study



Abstract
:1. Introduction
- (1)
- It has the ability to identify the leading vehicle type in real-time because the HMM hidden state can be predicted with limited historical data;
- (2)
- The prediction accuracy is ensured by training the model with a large number of naturalistic driving data;
- (3)
- Its responsiveness to dynamical conditions is achieved by estimating the optimum state of a car-following model based on historical data.
2. Car-Following Data Collection and Preprocessing
- a
- Velocity range: Ego vehicle velocity, , should be more than 20 km/h, because the condition that the speed is less than 20 km/h contains a lot of stop-and-go scenarios.
- b
- Distance range: Relative distance, , between the rear margin of the leading vehicle and the front margin of the ego vehicle should be less than 120 m. If this distance is greater than 120 m, the preceding vehicle has almost no effect on ego vehicle and this scenario is similar to the free-driving case.
- c
- Restrictions on leading vehicle: The leading vehicle should drive on the same lane with the ego vehicle.
- d
- Road curvature: The radius of the road should be larger than 150 m.
- e
- Time range: The ego vehicle should follow the leading vehicle consistently for more than 10 s. If the time is less than 10 s, there easily exists on-stable car-following scenarios, such as cut-in, cut-out and lane change.
- Car–car (C-C): a passenger car following a passenger car;
- Car–bus (C-B): a passenger car following a bus;
- Car–truck(C-T): a passenger car following a truck.
3. Car-Following Model Design
- (a)
- (b)
- It is a statistical model and the fundamental mechanism or detail of the driver response under internal exciting is not necessary [32].
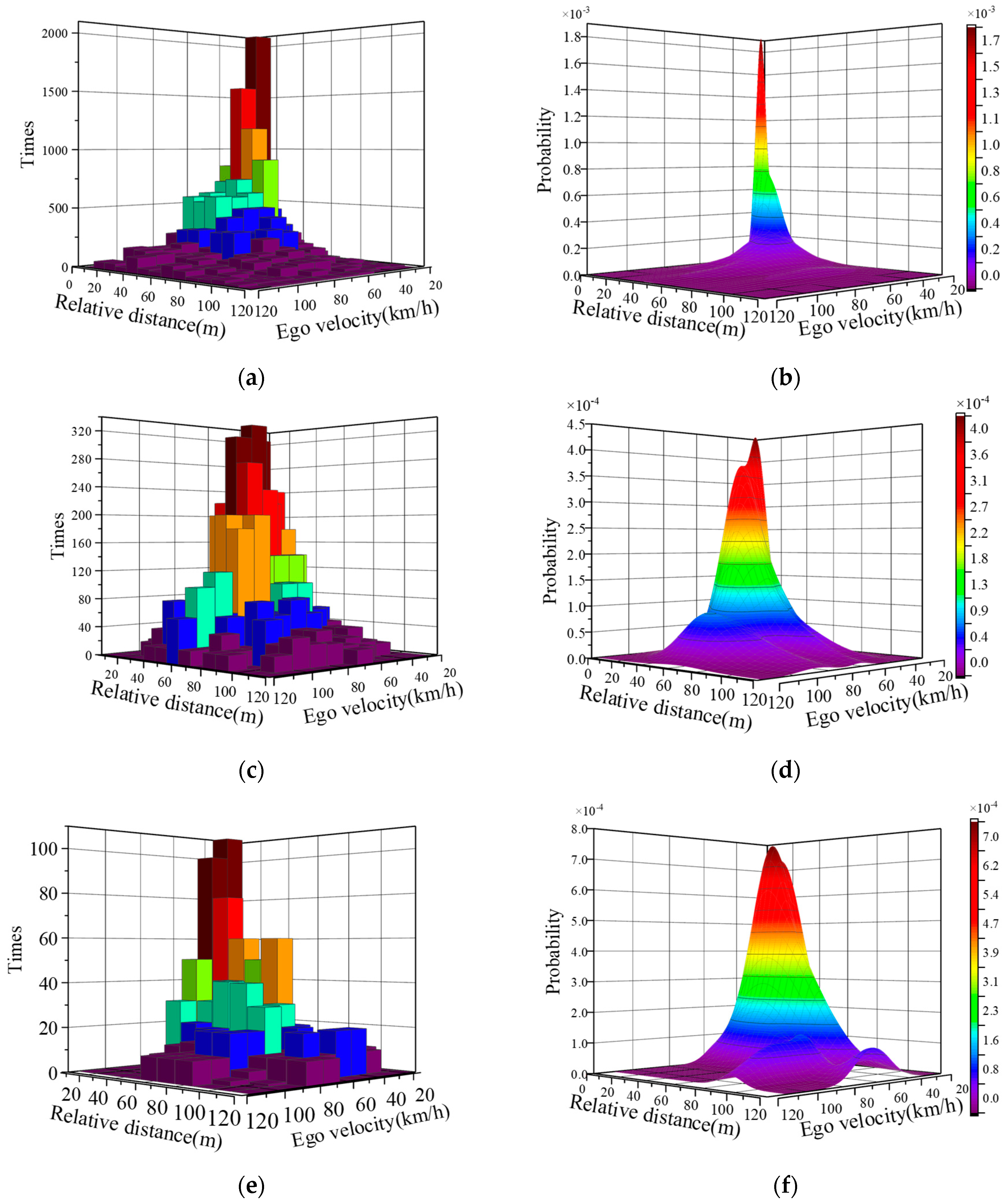
3.1. Car-following Behavior Fitted with Gaussian Mixture Model
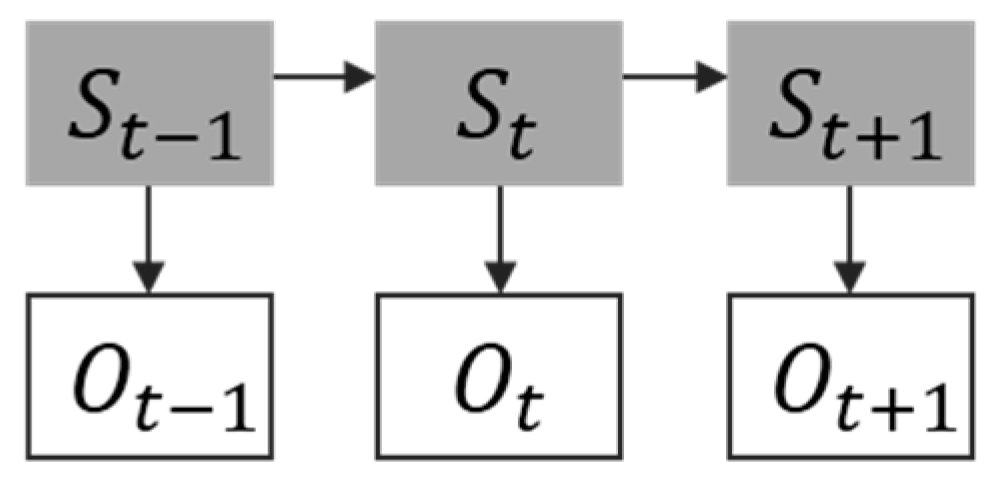
3.2. Identification of Leading Vehicle Type with Hidden Markov Model
4. Model Training
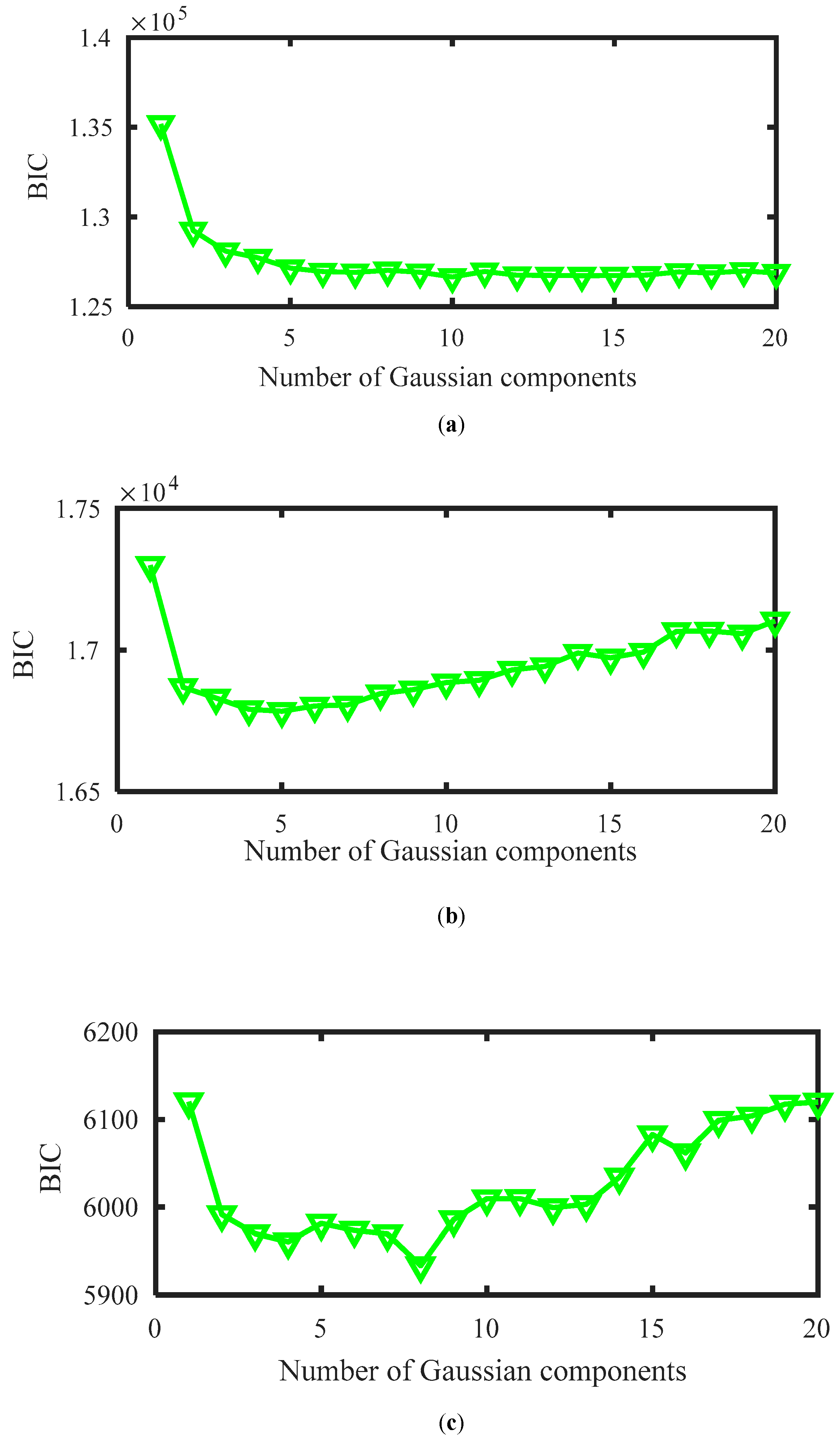
4.1. Training of GMM
4.2. Prediction of Vehicle Type
5. Model Testing
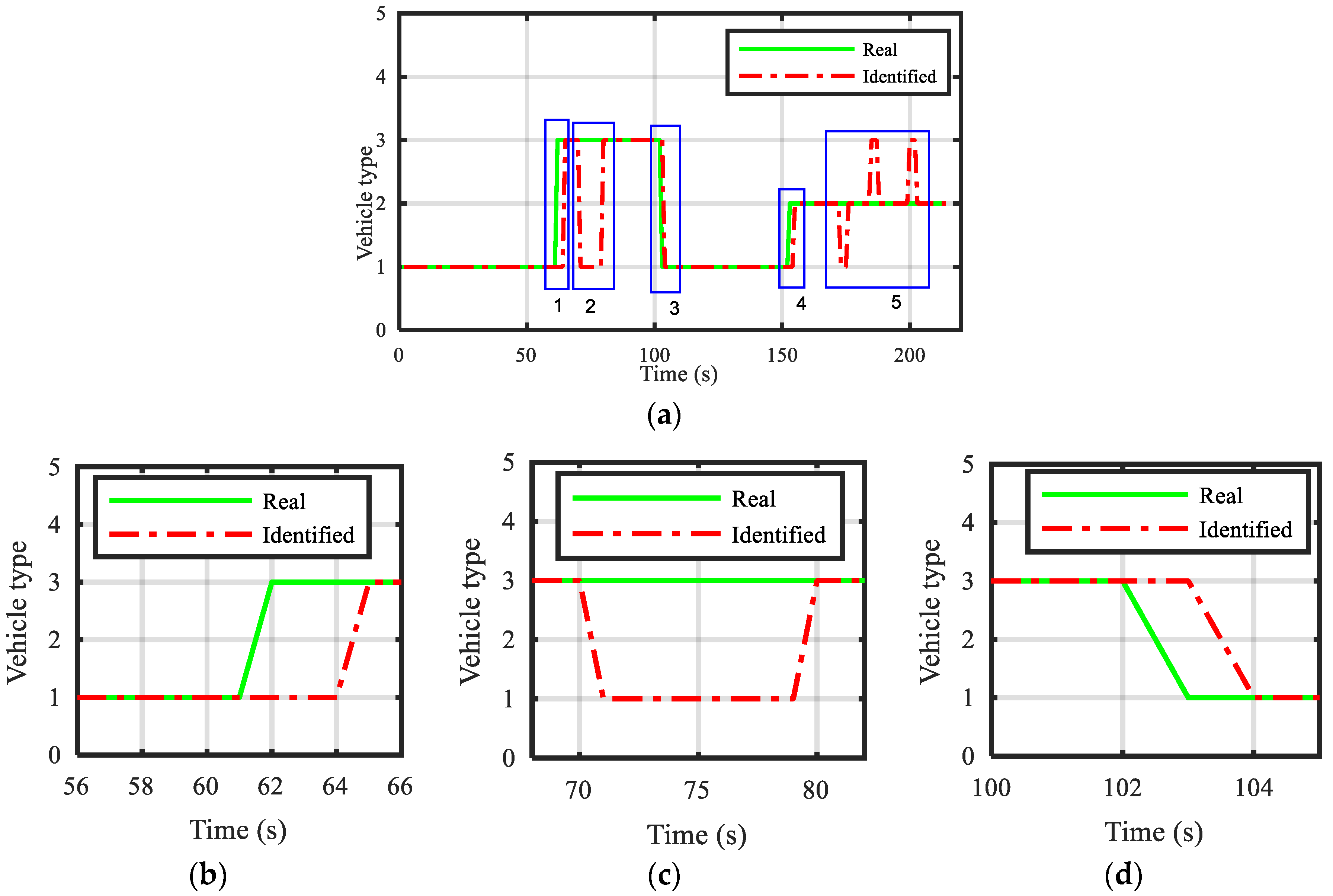
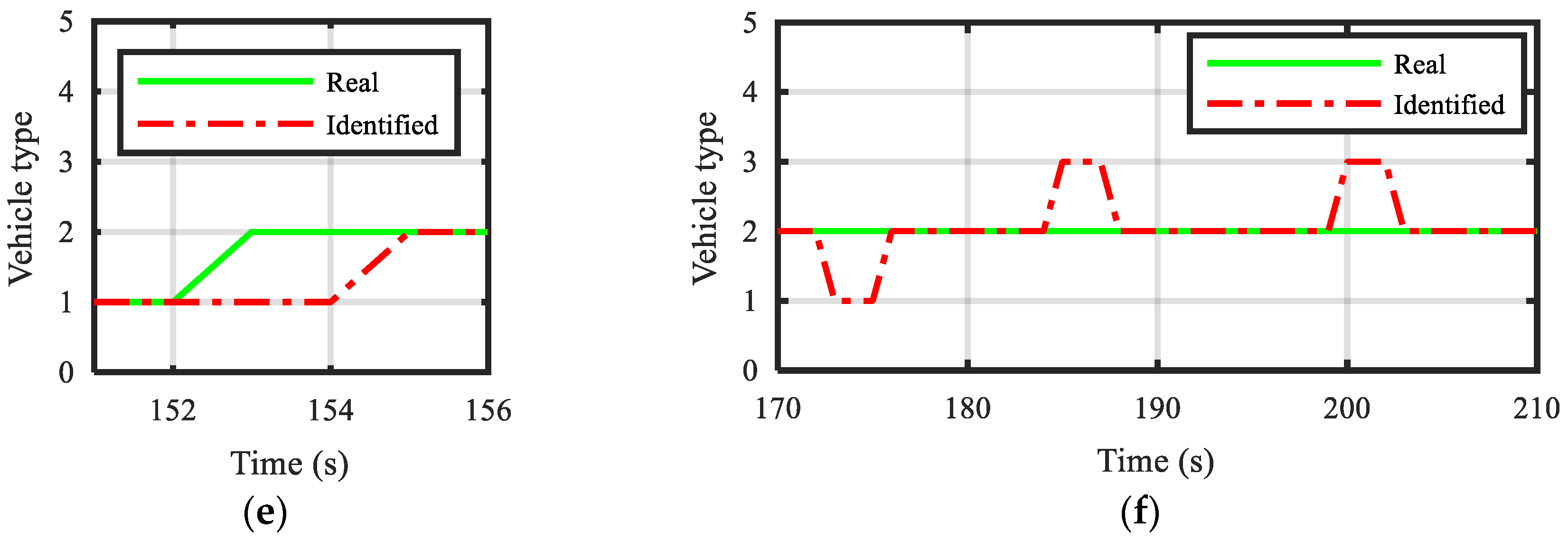
5.1. Identification Accuracy of Leading Vehicle Type
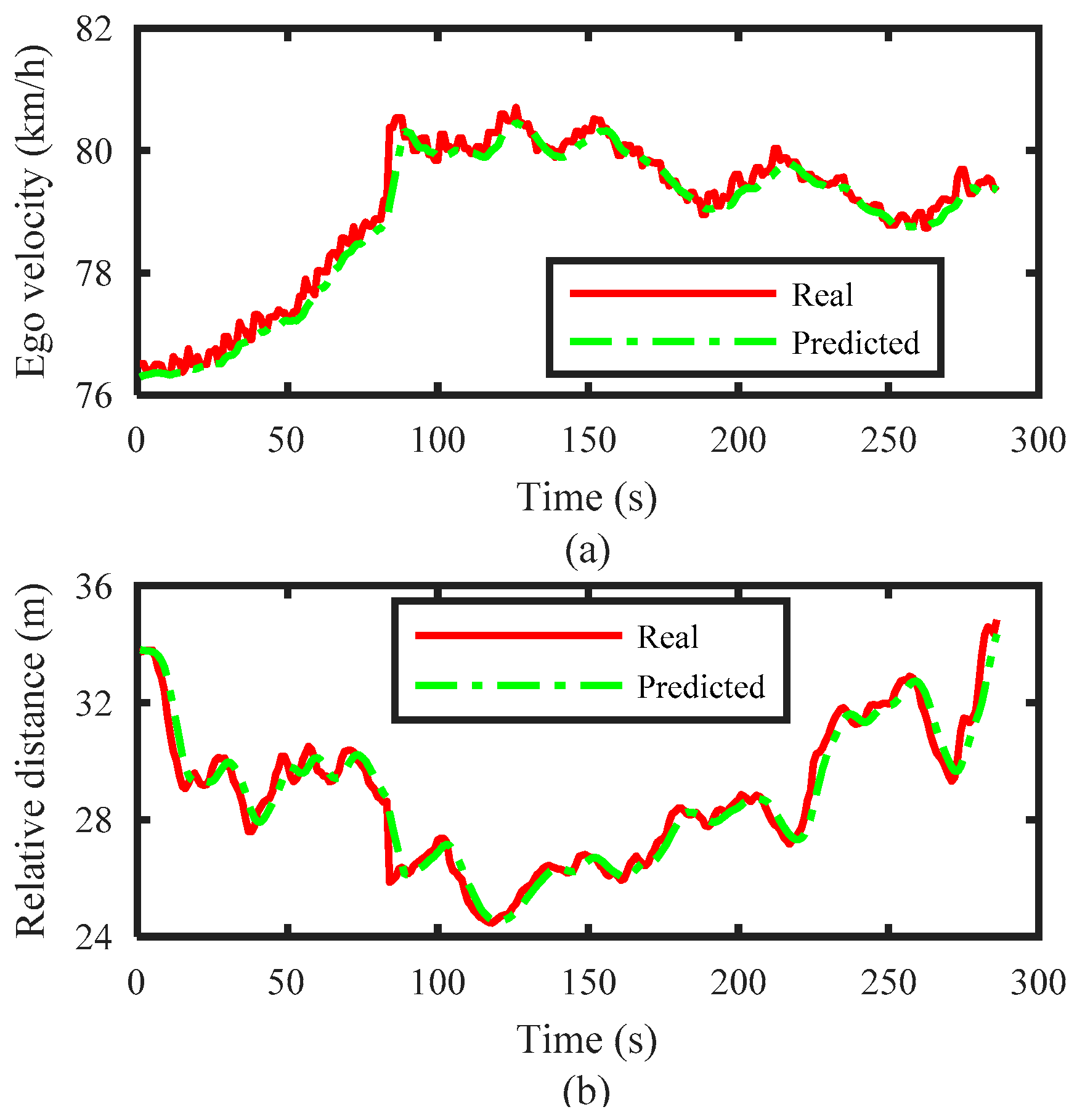
5.2. Dynamical Condition
6. Application and Analysis
6.1. Driver Behavior Mimic Application
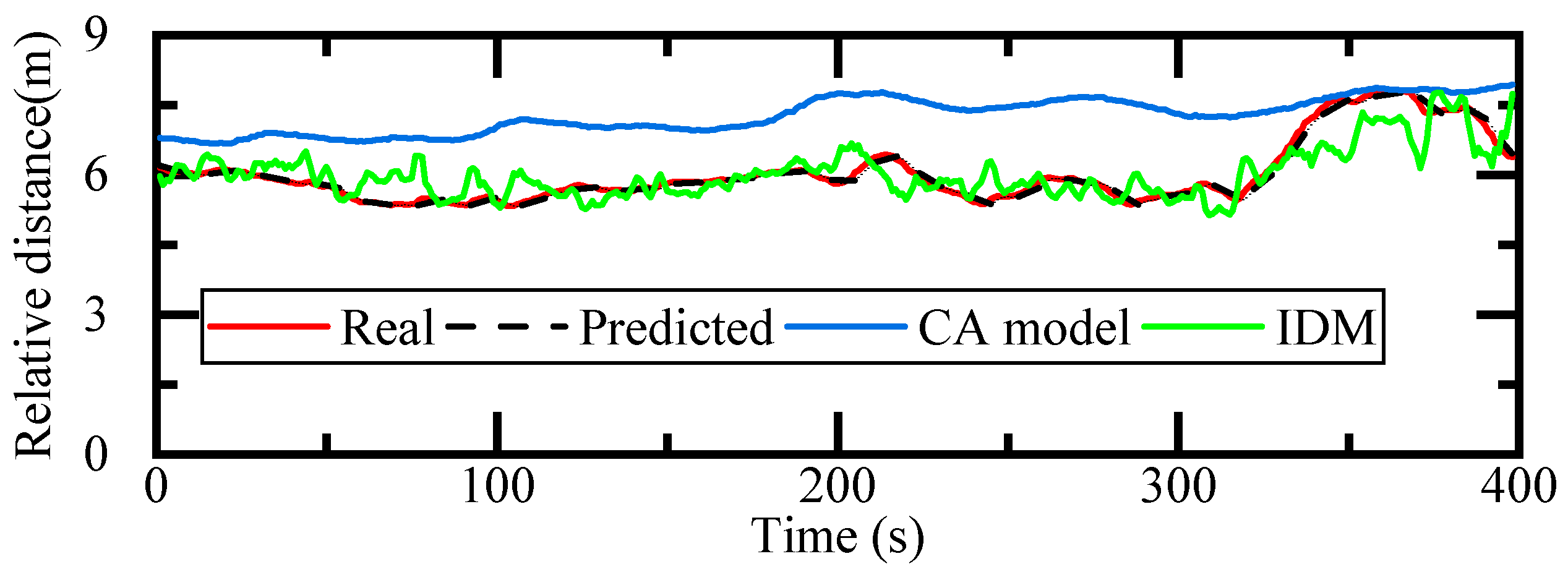
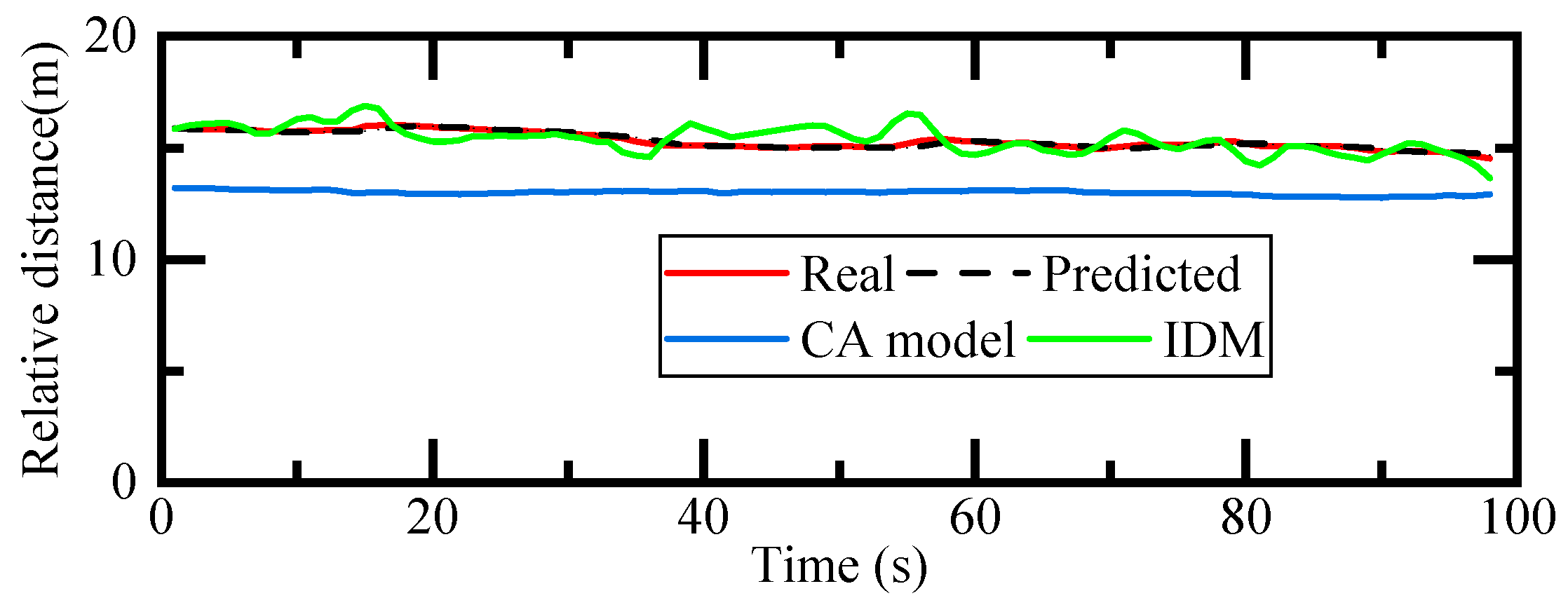
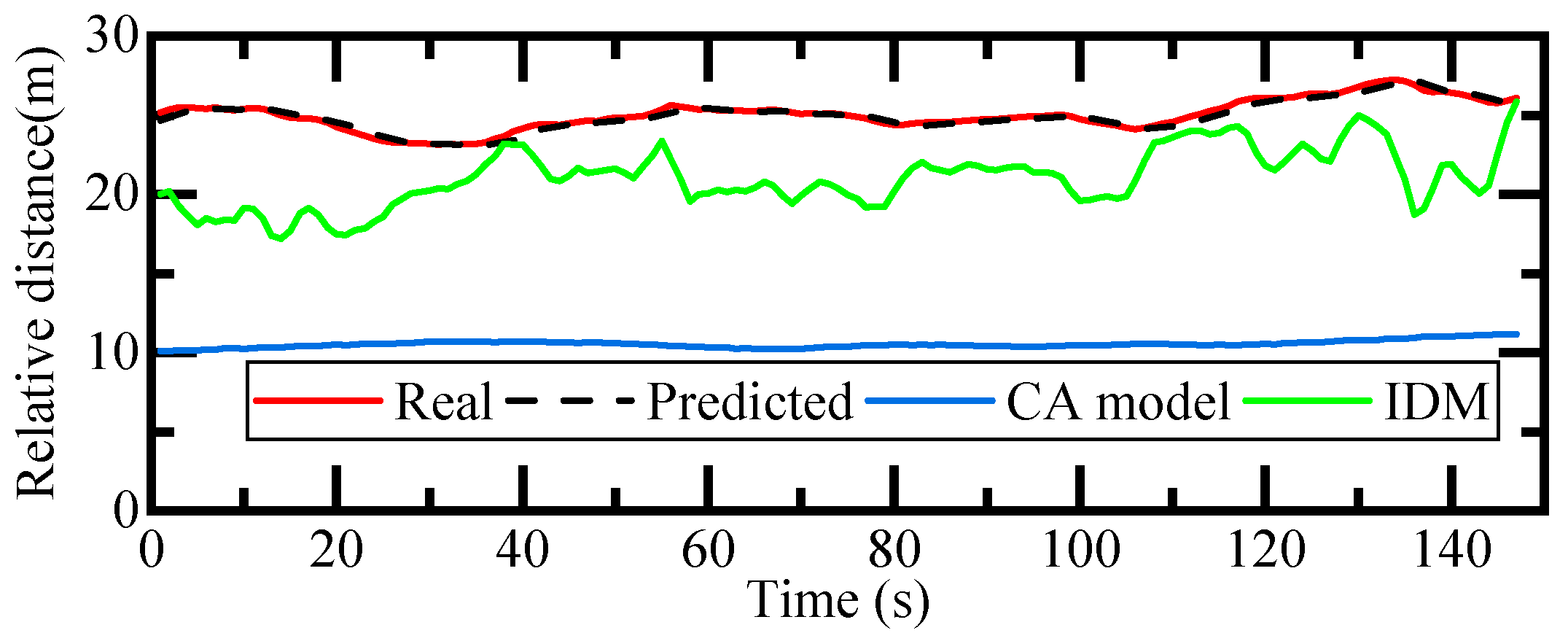
6.2. Comparative Analysis
7. Discussion and Future Work
7.1. Influence of Data Components
7.2. Influence of Individual Driving Style
7.3. Applications in Future Works
8. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Brackstone, M.; Mcdonald, M. Car-following: a historical review. Transp. Res. Part F Traffic Psychol. Behav. 1999, 2, 181–196. [Google Scholar] [CrossRef]
- Martinez, C.M.; Heucke, M.; Wang, F.-Y.; Gao, B.; Cao, D. Driving Style Recognition for Intelligent Vehicle Control and Advanced Driver Assistance: A Survey. IEEE Trans. Intell. Transp. Syst. 2018, 19, 666–676. [Google Scholar] [CrossRef]
- Rahman, M.; Chowdhury, M.; Khan, T.; Bhavsar, P. Improving the Efficacy of Car-Following Models with a New Stochastic Parameter Estimation and Calibration Method. IEEE Trans. Intell. Transp. Syst. 2015, 16, 1–13. [Google Scholar] [CrossRef]
- Pariota, L.; Galante, F.; Bifulco, G.N.; Luigi, P. The impact of the leading vehicle type on car-following behaviours. In Proceedings of the International Conference on Models and Technologies for Intelligent Transportation Systems (MT-ITS), Budapest, Hungary, 3–5 June 2015; pp. 30–37. [Google Scholar]
- Wang, W.; Xi, J.; Zhao, D. Learning and Inferring a Driver’s Braking Action in Car-Following Scenarios. IEEE Trans. Veh. Technol. 2018, 67, 3887–3899. [Google Scholar] [CrossRef]
- Kesting, A.; Treiber, M.; Schönhof, M.; Helbing, D. Adaptive cruise control design for active congestion avoidance. Transp. Nat. Res. C Emerg. Technol. 2008, 16, 668–683. [Google Scholar] [CrossRef]
- Jin, S.; Huang, Z.; Tao, P.; Wang, D. Car-Following Theory of Steady-State Traffic Flow. Oper. Res. 1959, 7, 499–505. [Google Scholar]
- Gipps, P. A behavioural car-following model for computer simulation. Transp. Nat. Res. B Methodol. 1981, 15, 105–111. [Google Scholar] [CrossRef]
- Oh, C.; Kim, T. Estimation of rear-end crash potential using vehicle trajectory data. Anal. Prev. 2010, 42, 1888–1893. [Google Scholar] [CrossRef] [PubMed]
- Bifulco, G.N.; Pariota, L.; Simonelli, F.; Di Pace, R. Development and testing of a fully Adaptive Cruise Control system. Transp. Nat. Res. C Emerg. Technol. 2013, 29, 156–170. [Google Scholar] [CrossRef]
- Kuge, N.; Yamamura, T.; Shimoyama, O.; Liu, A. A Driver Behavior Recognition Method Based on a Driver Model Framework; SAE Technical Paper Series; Institute of Transportation Library: Berkeley, CA, USA, 2000. [Google Scholar]
- Wu, Z.; Liu, Y.; Pan, G. A Smart Car Control Model for Brake Comfort Based on Car Following. IEEE Trans. Intell. Transp. Syst. 2009, 10, 42–46. [Google Scholar]
- Chen, X.; Li, L.; Zhang, Y. A Markov Model for Headway/Spacing Distribution of Road Traffic. IEEE Trans. Intell. Transp. Syst. 2010, 11, 773–785. [Google Scholar] [CrossRef]
- Yang, D.; Yu, D.; Yang, F.; Pu, Y.; Zhu, L.-L. An enhanced safe distance car-following model. J. Shanghai Jiaotong Univ. 2014, 19, 115–122. [Google Scholar] [CrossRef] [Green Version]
- Kesting, A.; Treiber, M. Calibrating car-following models by using trajectory data methodological study. Transp. Res. Rec. J. Transp. Res. Board 2008, 2088, 148–156. [Google Scholar] [CrossRef]
- Zhu, M.; Wang, X.; Tarko, A.; Fang, S. Modeling car-following behavior on urban expressways in Shanghai: A naturalistic driving study. Transp. Nat. Res. C Emerg. Technol. 2018, 93, 425–445. [Google Scholar] [CrossRef]
- Hao, S.; Yang, L.; Shi, Y. Data-driven car-following model based on rough set theory. IET Intell. Syst. 2018, 12, 49–57. [Google Scholar] [CrossRef]
- Khodayari, A.; Ghaffari, A.; Kazemi, R.; Braunstingl, R. A Modified Car-Following Model Based on a Neural Network Model of the Human Driver Effects. IEEE Trans. Syst. Man Cybern. Nat. Res. A Syst. Hum. 2012, 42, 1440–1449. [Google Scholar] [CrossRef]
- Pourabdollah, M.; Bjarkvik, E.; Furer, F.; Lindenberg, B.; Burgdorf, K. Calibration and evaluation of car following models using real-world driving data. In Proceedings of the IEEE 20th International Conference on Intelligent Transportation Systems (ITSC), Yokohama, Japan, 16–19 October 2017. [Google Scholar]
- Wang, X.; Jiang, R.; Li, L.; Lin, Y.; Zheng, X.; Wang, F.-Y. Capturing Car-Following Behaviors by Deep Learning. IEEE Trans. Intell. Transp. Syst. 2018, 19, 910–920. [Google Scholar] [CrossRef]
- Saffarian, M.; De Winter, J.C.F.; Happee, R. Enhancing Driver Car-Following Performance with a Distance and Acceleration Display. IEEE Trans. Hum. Mach. Syst. 2013, 43, 8–16. [Google Scholar] [CrossRef]
- Jin, P.J.; Yang, D.; Ran, B. Reducing the Error Accumulation in Car-Following Models Calibrated with Vehicle Trajectory Data. IEEE Trans. Intell. Transp. Syst. 2014, 15, 148–157. [Google Scholar] [CrossRef]
- Higgs, B.; Abbas, M. Segmentation and Clustering of Car-Following Behavior: Recognition of Driving Patterns. IEEE Trans. Intell. Transp. Syst. 2015, 16, 81–90. [Google Scholar] [CrossRef]
- Zhu, M.; Wang, X.; Wang, Y. Human-like autonomous car-following model with deep reinforcement learning. Transp. Nat. Res. C Emerg. Technol. 2018, 97, 348–368. [Google Scholar] [CrossRef]
- Ye, F.; Zhang, Y. Vehicle Type–Specific Headway Analysis Using Freeway Traffic Data. Transp. Rec. J. Transp. Nat. Res. 2009, 2124, 222–230. [Google Scholar] [CrossRef]
- Aghabayk, K.; Sarvi, M.; Forouzideh, N.; Young, W. New Car-Following Model considering Impacts of Multiple Lead Vehicle Types. Transp. Rec. J. Transp. Nat. Res. 2013, 2390, 131–137. [Google Scholar] [CrossRef]
- Chen, B.; Zhao, D.; Peng, H. Evaluation of automated vehicles encountering pedestrians at unsignalized crossings. In Proceedings of the IEEE Intelligent Vehicles Symposium (IV), Los Angeles, CA, USA, 11–14 June 2017; pp. 1679–1685. [Google Scholar]
- Dozza, M.; Bärgman, J.; Lee, J.D. Chunking: A procedure to improve naturalistic data analysis. Anal. Prev. 2013, 58, 309–317. [Google Scholar] [CrossRef] [Green Version]
- Aghabayk, K.; Sarvi, M.; Young, W. Understanding the Dynamics of Heavy Vehicle Interactions in Car-Following. J. Transp. Eng. 2012, 138, 1468–1475. [Google Scholar] [CrossRef]
- Pariota, L.; Bifulco, G.N.; Brackstone, M. A Linear Dynamic Model for Driving Behavior in Car Following. Transp. Sci. 2016, 50. [Google Scholar] [CrossRef]
- Jiang, R.; Hu, M.-B.; Zhang, H.; Gao, Z.-Y.; Jia, B.; Wu, Q.-S. On some experimental features of car-following behavior and how to model them. Transp. Nat. Res. B Methodol. 2015, 80, 338–354. [Google Scholar] [CrossRef] [Green Version]
- Lefèvre, S.; Carvalho, A.; Borrelli, F. A Learning-Based Framework for Velocity Control in Autonomous Driving. IEEE Trans. Autom. Sci. Eng. 2016, 13, 1–11. [Google Scholar] [CrossRef]
- Angkititrakul, P.; Terashima, R.; Wakita, T. On the Use of Stochastic Driver Behavior Model in Lane Departure Warning. IEEE Trans. Intell. Transp. Syst. 2011, 12, 174–183. [Google Scholar] [CrossRef]
- Lee, G.; Scott, C. EM algorithms for multivariate Gaussian mixture models with truncated and censored data. Comput. Stat. Data Anal. 2012, 56, 2816–2829. [Google Scholar] [CrossRef] [Green Version]
- Viterbi, A. Error bounds for convolutional codes and an asymptotically optimum decoding algorithm. IEEE Trans. Inf. Nat. Theory 1967, 13, 260–269. [Google Scholar] [CrossRef]
- Yuan, Y.; Liu, X. Municipal waste generation forecasting based on improved hidden markov model. Ind. Eng. Manag. 2014, 19, 52–56. [Google Scholar]
- Liu, S.; Sa, R.; Maguire, O.; Minderman, H.; Chaudhary, V. Spot counting on fluorescence in situ hybridization in suspension images using Gaussian mixture model. Image Process. 2015, 9413. [Google Scholar] [CrossRef]
- Zhang, X.-B.; Qian, R.-H. Research on technical state evaluation of Vehicle Equipment based on BIC cluster analysis. In Proceedings of the 2nd International Conference on Big Data Analysis (ICBDA), Beijing, China, 10–12 March 2017; pp. 303–306. [Google Scholar]
- Nhita, F.; Saepudin, D.; Adiwijaya; Wisesty, U.N. Comparative Study of Moving Average on Rainfall Time Series Data for Rainfall Forecasting Based on Evolving Neural Network Classifier. In Proceedings of the 3rd International Symposium on Computational and Business Intelligence (ISCBI), Bali, Indonesia, 7–9 December 2015. [Google Scholar]
- Meng, Q.; Weng, J. An improved cellular automata model for heterogeneous work zone traffic. Transp. Nat. Res. C Emerg. Technol. 2011, 19, 1263–1275. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Statistical Parameter | C-C | C-B | C-T |
|---|---|---|---|
| N | 6965 | 723 | 305 |
| Tc (s) | 242,620 | 20,003 | 6655 |
| Tac (s) | 34.8 | 27.7 | 21.8 |
| J | Ego Velocity | Relative Distance | ||
|---|---|---|---|---|
| RMSE (km/h) | RMSPE | RMSE (m) | RMSPE | |
| 3 | 0.1907 | 0.0097 | 0.0750 | 0.0119 |
| 5 | 0.2627 | 0.0133 | 0.1064 | 0.0169 |
| 7 | 0.3368 | 0.0170 | 0.1352 | 0.0213 |
| 9 | 0.4110 | 0.0206 | 0.1616 | 0.0254 |
| 11 | 0.4813 | 0.0241 | 0.1857 | 0.0291 |
| Identification Accuracy | C-C | C-B | C-T | Average |
|---|---|---|---|---|
| 98.7% | 92.8% | 98.2% | 96.6% |
| Identification Accuracy | C-C | C-B | C-T | Average |
|---|---|---|---|---|
| 87.6% | 81.2% | 80.4% | 83.1% |
| Leading Vehicle Type | Model | Relative Distance | |
|---|---|---|---|
| RMSE (m) | RMSPE | ||
| Passenger car | CA | 1.3481 | 0.2360 |
| IDM | 0.4192 | 0.0662 | |
| Proposed | 0.0750 | 0.0119 | |
| Bus | CA | 2.3510 | 0.1524 |
| IDM | 0.4986 | 0.1327 | |
| Proposed | 0.0820 | 0.0054 | |
| Truck | CA | 14.5195 | 0.5791 |
| IDM | 4.4358 | 0.1765 | |
| Proposed | 0.2281 | 0.0091 | |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, P.; Gao, F.; Li, K. A Vehicle Type Dependent Car-following Model Based on Naturalistic Driving Study. Electronics 2019, 8, 453. https://doi.org/10.3390/electronics8040453
Wu P, Gao F, Li K. A Vehicle Type Dependent Car-following Model Based on Naturalistic Driving Study. Electronics. 2019; 8(4):453. https://doi.org/10.3390/electronics8040453
Chicago/Turabian StyleWu, Ping, Feng Gao, and Keqiang Li. 2019. "A Vehicle Type Dependent Car-following Model Based on Naturalistic Driving Study" Electronics 8, no. 4: 453. https://doi.org/10.3390/electronics8040453
APA StyleWu, P., Gao, F., & Li, K. (2019). A Vehicle Type Dependent Car-following Model Based on Naturalistic Driving Study. Electronics, 8(4), 453. https://doi.org/10.3390/electronics8040453