Indoor Localization Method Based on Regional Division with IFCM

Abstract
:1. Introduction
2. Related Work
2.1. Fingerprint Localization Method
2.2. Regional Division
2.3. AP Selection Method
3. Fingerprint Localization Method
3.1. Offline Training Phase
3.1.1. Regional Division
- Determine the number range of clustering .
- K-means algorithm is used for clustering, then the average BWP index values of samples were calculated under the number of clusters .
- Select the cluster number corresponding to the largest BWP index as the best clustering number C and the initial cluster center , is the j-th RSS value, and is the i-th cluster center, initialize weighting coefficient m = 2, the iterative stop threshold is ε, the iteration counter l = 0.
- Update the membership matrix according to the following formula [45]:
- Update the clustering center according to the following formula [45]:
- Determine whether the algorithm stops executing. If , let , jump to step 2 to continue this iteration. If , stop the current iteration, and the cluster center V and the membership matrix U are output.
- Determine whether the number of reference points of the sub-region is less than a threshold. If it is less than the threshold, the iteration stops completely; if it is greater than the threshold, then it jumps to step 3 to perform the next layer division.
3.1.2. AP Optimization
- Classify each RSS value into one class and calculate the distance between each two classes. The average distance method is used to calculate the distance between classes;
- Find the two nearest RSS values and classify them as one class;
- Recalculate the distance between each class;
- Repeat steps 2 and 3 until RSS values are divided into two classes, output AP optimal results.
| Algorithm 1 AP optimization |
| 1: Get all RSS values D = , initialize k = N. |
| 2: Make each RSS value in the data set D a cluster, marked as {, , …, }. |
| 3: Repeat |
| 4: Compute all pair-wise distances of clusters {, , …, }. |
| 5: Select min{}. |
| 6: Merge the two clusters with the smallest distance. |
| 7: Form a new cluster {,, …, {,}, …, CN}, set k = N − 1. |
| 8: Until k = 2 |
3.2. Online Localization Phase
3.2.1. Sub-Region Selection
3.2.2. Positioning Match
| Algorithm 2. Localization Method |
| Input: , , T denotes the RSS sample of the target point, . denotes the cluster center of each sub-region. |
| Output: the coordinates of the target point. |
| Step1: Select the sub-region |
| 1.1 do while ( ø) |
| 1.2 Calculate the distance between cluster center and the target location. |
| 1.3 Select min{} corresponding class as the region of the target location. |
| 1.4 Update under the region. |
| 1.5 Endwhile |
| Step2: Calculate the coordinate |
| 2.1 Calculate the PCC between target fingerprint and fingerprint of each reference point. |
| 2.2 Select k maximum PCC. |
| 2.3 k PCC are used as weights to calculate coordinates (x,y). |
4. Experimental Analysis
4.1. Regional Division Result
4.2. The Effect of Regional Division on Location Precision and Time
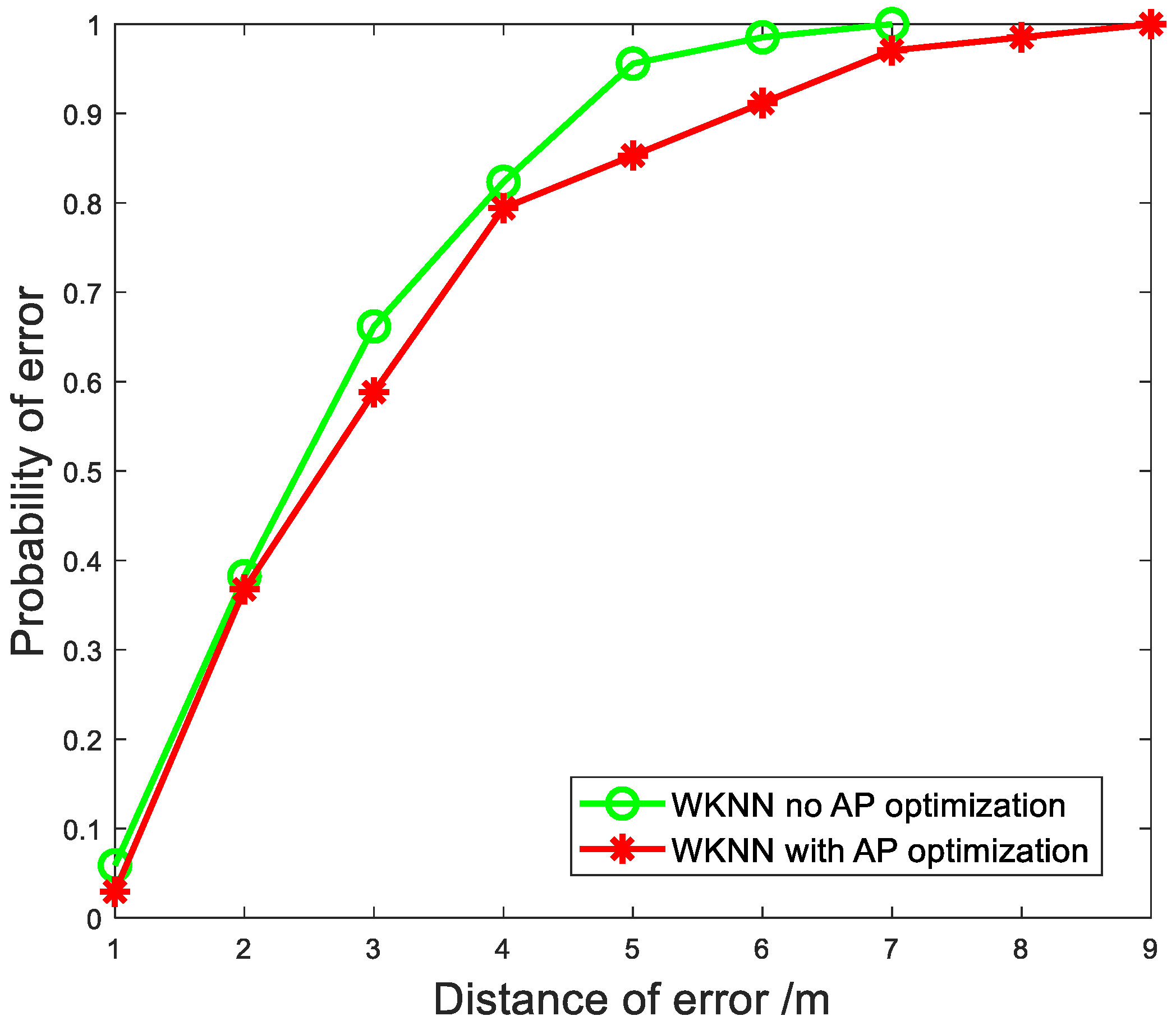
4.3. The Effect of AP Optimization on Location Precision and Time
5. Conclusions and Future Work
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Zou, D.; Meng, W.; Han, S.; He, K.; Zhang, Z. Toward Ubiquitous LBS: Multi-Radio Localization and Seamless Positioning. IEEE Wirel. Commun. 2016, 23, 107–113. [Google Scholar] [CrossRef]
- Alletto, S.; Cucchiara, R.; Fiore, G.D.; Mainetti, L.; Mighali, V.; Patrono, L.; Serra, G. An Indoor Location-Aware System for an IoT-Based Smart Museum. IEEE Int. Things J. 2016, 3, 244–253. [Google Scholar] [CrossRef]
- Kurniawan, B.; Pranoto, H. Destination Information System for Bandung City Using Location-Based Services (LBS) on Android. IOP Conf. Ser. Mater. Sci. Eng. 2018, 306, 012016. [Google Scholar] [CrossRef]
- Khalajmehrabadi, A.; Gatsis, N.; Akopian, D. Modern WLAN Fingerprinting Indoor Positioning Methods and Deployment Challenges. IEEE Commun. Surv. Tutor. 2017, 19, 1974–2002. [Google Scholar] [CrossRef] [Green Version]
- Rida, M.E.; Liu, F.; Jadi, Y.; Algawhari, A.A.A.; Askourih, A. Indoor Location Position Based on Bluetooth Signal Strength. In Proceedings of the International Conference on Information Science and Control Engineering, Shanghai, China, 24–26 April 2015; pp. 769–773. [Google Scholar]
- Huh, J.H.; Seo, K. An Indoor Location-Based Control System Using Bluetooth Beacons for IoT Systems. Sensors 2017, 17, 2917. [Google Scholar] [CrossRef] [PubMed]
- Segura, M.; Mut, V.; Sisterna, C. Ultra-Wideband Indoor Navigation System. IET Radar Sonar Navig. 2012, 6, 402–411. [Google Scholar] [CrossRef]
- Kaniewski, P.; Kazubek, J.; Kraszewski, T. Application of UWB Modules in Indoor Navigation System. In Proceedings of the IEEE International Conference on Microwaves, Antennas, Communications and Electronic Systems, Tel-Aviv, Israel, 13–15 November 2018. [Google Scholar]
- Janicka, J.; Rapinski, J. An Example and Analysis for Ambiguity Resolution in the Indoor ZigBee Positioning System. Rep. Geod. Geoinform. 2017, 103, 1–9. [Google Scholar] [CrossRef] [Green Version]
- Wu, C.; Zhu, M.; Zhang, Y. The Design and Implementation of an Infrared Indoor Positioning and Lighting System. In Proceedings of the Advanced Information Technology, Electronic and Automation Control Conference, Chongqing, China, 25–26 march 2017. [Google Scholar]
- Seco, F.; Jiménez, A.R. Smartphone-Based Cooperative Indoor Localization with RFID Technology. Sensors 2018, 18, 266. [Google Scholar] [CrossRef]
- Liu, F.; Zhong, D. GSOS-ELM: An RFID-Based Indoor Localization System Using GSO Method and Semi-Supervised Online Sequential ELM. Sensors 2018, 18, 1995. [Google Scholar] [CrossRef] [PubMed]
- Tian, X.; Li, W.; Yang, Y.; Zhang, Z.; Wang, X. Optimization of Fingerprints Reporting Strategy for WLAN Indoor Localization. IEEE Trans. Mob. Comput. 2018, 17, 390–403. [Google Scholar] [CrossRef]
- Laitinen, E.; Lohan, E.S. Are all the Access Points necessary in WLAN-based indoor positioning? In Proceedings of the International Conference on Localization and GNSS, Gothenburg, Sweden, 22–24 June 2015. [Google Scholar]
- He, S.; Chan, S.H.G. Wi-Fi Fingerprint-Based Indoor Positioning: Recent Advances and Comparisons. IEEE Commun. Surv. Tutor. 2016, 18, 466–490. [Google Scholar] [CrossRef]
- Guo, X.; Li, L.; Ansari, N.; Liao, B. Accurate WiFi Localization by Fusing a Group of Fingerprints via Global Fusion Profile. IEEE Trans. Veh. Technol. 2018, 67, 7314–7325. [Google Scholar] [CrossRef]
- Jun, J.; He, L.; Gu, Y.; Jiang, W.; Kushwaha, G.; Vipin, A.; Cheng, L.; Liu, C.; Zhu, T. Low-Overhead WiFi Fingerprinting. IEEE Trans. Mob. Comput. 2018, 17, 590–603. [Google Scholar] [CrossRef]
- Li, W.; Wei, D.; Yuan, H.; Ouyang, G. A Novel Method of WiFi Fingerprint Positioning Using Spatial Multi-Points Matching. In Proceedings of the International Conference on Indoor Positioning and Indoor Navigation, Alcala de Henares, Spain, 4–7 October 2016; pp. 1–8. [Google Scholar]
- Guo, X.; Shao, S.; Ansari, N.; Khreishah, A. Indoor Localization Using Visible Light via Fusion of Multiple Classifiers. IEEE Photonics J. 2017, 9, 1–16. [Google Scholar] [CrossRef]
- Schatzberg, U.; Banin, L.; Amizur, Y. Enhanced WiFi ToF Indoor Positioning System with MEMS-Based INS and Pedometric Information. In Proceedings of the 2014 IEEE/ION Position, Location and Navigation Symposium—PLANS 2014, Monterey, CA, USA, 5–8 May 2014; pp. 185–192. [Google Scholar]
- Arnau, J.; Atzeni, I.; Kountouris, M. Impact of LOS/NLOS Propagation and Path Loss in Ultra-Dense Cellular Networks. In Proceedings of the 2016 IEEE International Conference on Communications (ICC), Kuala Lumpur, Malaysia, 22–27 May 2016. [Google Scholar]
- Bahl, P.; Padmanabhan, V.N. RADAR: An In-Building RF-Based User Location and Tracking System. In Proceedings of the IEEE Infocom 2000. Conference on Computer Communications, Nineteenth Annual Joint Conference of the IEEE Computer and Communications Societies, Tel Aviv, Israel, 26–30 March 2000; pp. 775–784. [Google Scholar]
- Prasithsangaree, P.; Krishnamurthy, P.; Chrysanthis, P.K. On Indoor Position Location with Wireless LANs. In Proceedings of the IEEE International Symposium on Personal, Pavilhao Altantico, Lisboa, 18 September 2002. [Google Scholar]
- Niu, J.; Wang, B.; Shu, L.; Duong, T.Q.; Chen, Y. ZIL: An Energy-Efficient Indoor Localization System Using ZigBee Radio to Detect WiFi Fingerprints. IEEE J. Sel. Areas Commun. 2015, 33, 1431–1442. [Google Scholar] [CrossRef]
- Mirowski, P.; Steck, H.; Whiting, P.; Palaniappan, R.; MacDonald, M.; Ho, T.K. KL-Divergence Kernel Regression for Non-Gaussian Fingerprint Based Localization. In Proceedings of the International Conference on Indoor Positioning and Indoor Navigation, Guimaraes, Portugal, 21–23 September 2011; pp. 1–10. [Google Scholar]
- Wu, C.; Yang, Z.; Liu, Y.; Xi, W. WILL: Wireless Indoor Localization without Site Survey. IEEE Trans. Parallel Distrib. Syst. 2013, 24, 839–848. [Google Scholar] [Green Version]
- Khalajmehrabadi, A.; Gatsis, N.; Pack, D.; Akopian, D. A Joint Indoor WLAN Localization and Outlier Detection Scheme Using LASSO and Elastic-Net Optimization Techniques. IEEE Trans. Mob. Comput. 2017, 16, 2079–2092. [Google Scholar] [CrossRef] [Green Version]
- Gu, Z.; Chen, Z.; Zhang, Y.; Zhu, Y.; Lu, M.; Chen, A. Reducing Fingerprint Collection for Indoor Localization. Comput. Commun. 2016, 83, 56–63. [Google Scholar] [CrossRef]
- Wang, J.; Jiang, H.; Xiong, J.; Jamieson, K.; Chen, X.; Fang, D.; Xie, B. LiFS: Low Human-Effort, Device-Free Localization with Fine-Grained Subcarrier Information. In Proceedings of the International Conference on Mobile Computing and Networking, New York, NY, USA, 3–7 October 2016; pp. 243–256. [Google Scholar]
- Wang, X.; Gao, L.; Mao, S.; Pandey, S. CSI-Based Fingerprinting for Indoor Localization: A Deep Learning Approach. IEEE Trans. Veh. Technol. 2017, 66, 763–776. [Google Scholar] [CrossRef]
- Chen, H.; Zhang, Y.; Li, W.; Tao, X.; Zhang, P. ConFi: Convolutional Neural Networks Based Indoor Wi-Fi Localization Using Channel State Information. IEEE Access 2017, 5, 18066–18074. [Google Scholar] [CrossRef]
- Sanchez-Rodriguez, D.; Hernandez-Morera, P.; Quinteiro, J.M.; Alonso-Gonzalez, I. A Low Complexity System Based on Multiple Weighted Decision Trees for Indoor Localization. Sensors 2015, 15, 14809–14829. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wang, B.; Chen, Q.; Yang, L.T.; Chao, H.C. Indoor Smartphone Localization Via Fingerprint Crowdsourcing: Challenges and Approaches. IEEE Wirel. Commun. 2016, 23, 82–89. [Google Scholar] [CrossRef]
- Zhuang, Y.; Syed, Z.; Li, Y.; EI-Sheimy, N. Evaluation of Two WiFi Positioning Systems Based on Autonomous Crowdsourcing of Handheld Devices for Indoor Navigation. IEEE Trans. Mob. Comput. 2016, 15, 1982–1995. [Google Scholar] [CrossRef]
- He, S.; Lin, W.; Chan SH, G. Indoor Localization and Automatic Fingerprint Update with Altered AP Signals. IEEE Trans. Mob. Comput. 2017, 16, 1897–1910. [Google Scholar] [CrossRef]
- Xue, W.; Hua, X.; Li, Q.; Yu, K.; Qiu, W.; Zhou, B.; Cheng, K. A New Weighted Algorithm Based on the Uneven Spatial Resolution of RSSI for Indoor Localization. IEEE Access 2018, 6, 26588–26595. [Google Scholar] [CrossRef]
- Razavi, A.; Valkama, M.; Lohan, E.S. K-Means Fingerprint Clustering for Low-Complexity Floor Estimation in Indoor Mobile Localization. In Proceedings of the GLOBECOM Workshops, San Diego, CA, USA, 6–10 December 2015. [Google Scholar]
- Sun, Y.; Xu, Y.; Ma, L.; Deng, Z. KNN-FCM Hybrid Algorithm for Indoor Location in WLAN. In Proceedings of the Power Electronics and Intelligent Transportation System, Shenzhen, China, 19–20 December 2009; pp. 251–254. [Google Scholar]
- He, C.; Guo, S.; Wu, Y.; Yang, Y. A novel radio map construction method to reduce collection effort for indoor localization. Measurement 2016, 94, 423–431. [Google Scholar] [CrossRef]
- Laitinen, E.; Lohan, E.S. On the Choice of Access Point Selection Criterion and Other Position Estimation Characteristics for WLAN-Based Indoor Positioning. Sensors 2016, 16, 737. [Google Scholar] [CrossRef] [PubMed]
- Zou, H.; Luo, Y.; Lu, X.; Jiang, H.; Xie, L. A Mutual Information Based Online Access Point Selection Strategy for WiFi Indoor Localization. In Proceedings of the IEEE International Conference on Automation Science and Engineering, Gothenburg, Sweden, 24–28 August 2015; pp. 180–185. [Google Scholar]
- Fang, S.H.; Lin, T. Principal Component Localization in Indoor WLAN Environments. IEEE Trans. Mob. Comput. 2012, 11, 100–110. [Google Scholar] [CrossRef]
- Lin, T.N.; Fang, S.H.; Tseng, W.H.; Lee, C.W.; Hsieh, J.W. A Group-Discrimination-Based Access Point Selection for WLAN Fingerprinting Localization. IEEE Trans. Veh. Technol. 2014, 63, 3967–3976. [Google Scholar] [CrossRef]
- Zhou, S.B.; Xu, Z.Y.; Tang, X.Q. Method for Determining Optimal Number of Clusters in K-Means Clustering Algorithm. J. Comput. Appl. 2010, 30, 1995–1998. [Google Scholar] [CrossRef]
- Suroso, D.J.; Cherntanomwong, P.; Sooraksa, P.; Takada, J. Fingerprint-Based Technique for Indoor Localization in Wireless Sensor Networks Using Fuzzy C-Means Clustering Algorithm. In Proceedings of the International Symposium on Intelligent Signal Processing & Communications Systems, Chiang Mai, Thailand, 7–9 December 2012. [Google Scholar]
- Honkavirta, V.; Perala, T.; Ali-Loytty, S.; Piche, R. A Comparative Survey of WLAN Location Fingerprinting Methods. In Proceedings of the Workshop on Positioning, Hannover, Germany, 19 March 2009. [Google Scholar]
- Chen, G.; Liu, Q.; Wei, Y.; Yu, Q. An Efficient Indoor Location System in WLAN Based on Database Partition and Euclidean Distance-Weighted Pearson Correlation Coefficient. In Proceedings of the IEEE International Conference on Computer & Communications, Chengdu, China, 14–17 October 2017. [Google Scholar]
- Mehta, D.S.; Chen, S. A Spearman Correlation Based Star Pattern Recognition. In Proceedings of the 2017 IEEE International Conference on Image Processing (ICIP), Beijing, China, 17–20 September 2017; pp. 4372–4376. [Google Scholar]
- Jekabsons, G.; Zuravlyov, V. Refining Wi-Fi Based Indoor Positioning. In Proceedings of the International Scientific Conference Applied Information and Communication Technologies, Jelgava, Latvia, 22–23 April 2010; pp. 87–95. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Clustering Number | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 |
| BWP | 0.2407 | 0.2940 | 0.2632 | 0.2620 | 0.2514 | 0.2453 | 0.2459 | 0.2406 | 0.2581 | 0.2568 |
| Clustering Number | 12 | 13 | 14 | 15 | 16 | 17 | 18 | 19 | 20 | 21 |
| BWP | 0.2516 | 0.2524 | 0.2612 | 0.2453 | 0.2552 | 0.2494 | 0.2401 | 0.2383 | 0.2426 | 0.2239 |
| Clustering Number | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 |
| BWP | 0.2787 | 0.2772 | 0.2752 | 0.2301 | 0.2444 | 0.2242 | 0.2178 | 0.2018 | 0.2013 |
| Clustering Number | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 |
| BWP | 0.2326 | 0.2487 | 0.2493 | 0.2406 | 0.2506 | 0.2772 | 0.2817 | 0.2733 | 0.2610 |
| Clustering Number | 2 | 3 | 4 | 5 | 6 | 7 |
| BWP | 0.2453 | 0.2186 | 0.2095 | 0.2423 | 0.2422 | 0.2194 |
| Area | Clustering Number | ||||
|---|---|---|---|---|---|
| 2 | 3 | 4 | 5 | 6 | |
| Z11 | 0.2753 | 0.1849 | 0.2188 | 0.2132 | 0.1723 |
| Z12 | 0.2538 | 0.3199 | 0.2445 | 0.2383 | 0.2307 |
| Z112 | 0.2307 | 0.2195 | 0.1677 | 0.1427 | 0.1103 |
| Z31 | 0.2723 | 0.2577 | 0.2833 | 0.2183 | 0.1496 |
| Clustering Number | 2 | 3 |
| BWP | 0.1500 | 0.2187 |
| Algorithm | No Regional Division | Regional Division |
|---|---|---|
| Euclidean | 1.61 × 10−4 s | 5.16 × 10−5 s |
| Pearson | 1.58 × 10−2 s | 1.80 × 10−3 s |
| Spearman | 2.4 × 10−2 s | 1.30 × 10−3 s |
| Algorithm | No AP Optimization | AP Optimization |
|---|---|---|
| Euclidean | 5.16 × 10−5 s | 4.61 × 10−5 s |
| Pearson | 1.80 × 10−3 s | 9.27 × 10−4 s |
| Spearman | 1.30 × 10−3 s | 1.20 × 10−3 s |
| Algorithm | Mean Error (m) | Median (m) | RMSE (m) | Max (m) | 90th (m) |
|---|---|---|---|---|---|
| KNN | 2.8 | 2.5 | 3.1 | 8 | 4.6 |
| WKNN | 2.5 | 2.3 | 2.9 | 7 | 4.6 |
| FCM | 3.4 | 3.2 | 3.8 | 9 | 5.6 |
| we proposed | 2.4 | 2.4 | 2.8 | 7 | 4.2 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, J.; Gao, X.; Hu, Z.; Wang, H.; Cao, T.; Yu, L. Indoor Localization Method Based on Regional Division with IFCM. Electronics 2019, 8, 559. https://doi.org/10.3390/electronics8050559
Li J, Gao X, Hu Z, Wang H, Cao T, Yu L. Indoor Localization Method Based on Regional Division with IFCM. Electronics. 2019; 8(5):559. https://doi.org/10.3390/electronics8050559
Chicago/Turabian StyleLi, Junhuai, Xixi Gao, Zhiyong Hu, Huaijun Wang, Ting Cao, and Lei Yu. 2019. "Indoor Localization Method Based on Regional Division with IFCM" Electronics 8, no. 5: 559. https://doi.org/10.3390/electronics8050559
APA StyleLi, J., Gao, X., Hu, Z., Wang, H., Cao, T., & Yu, L. (2019). Indoor Localization Method Based on Regional Division with IFCM. Electronics, 8(5), 559. https://doi.org/10.3390/electronics8050559