Improvement in SNR by Adaptive Range Gates for RCS Measurements in the THz Region


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Method of the Adaptive Range Gate
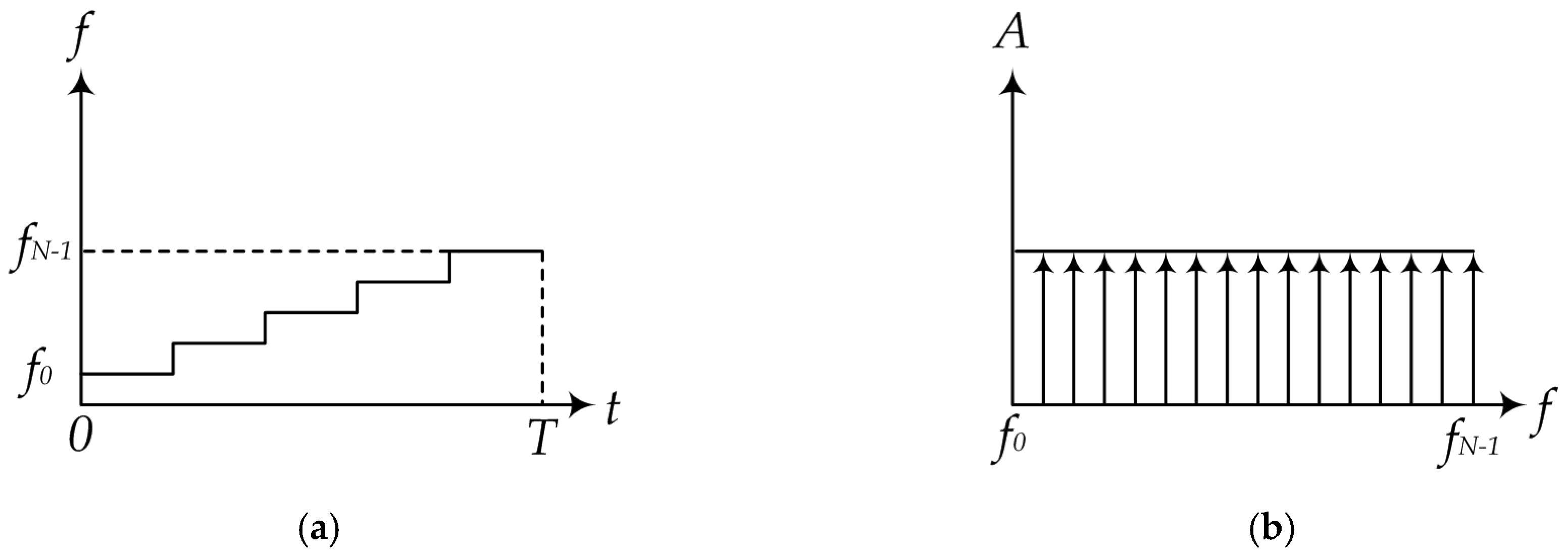
2.1. The Signal Model of Step-Frequency Systems
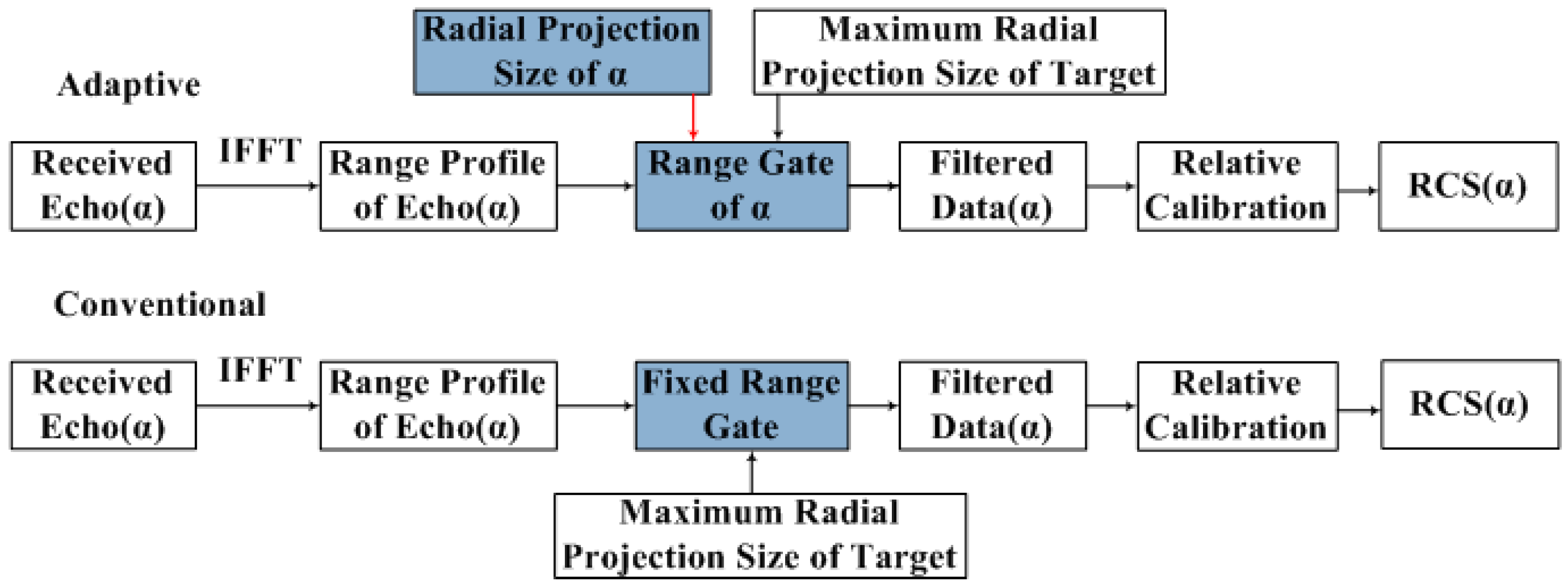
2.2. Method of the Adaptive Range Gate
3. The THz RCS Measurement System and Experiments
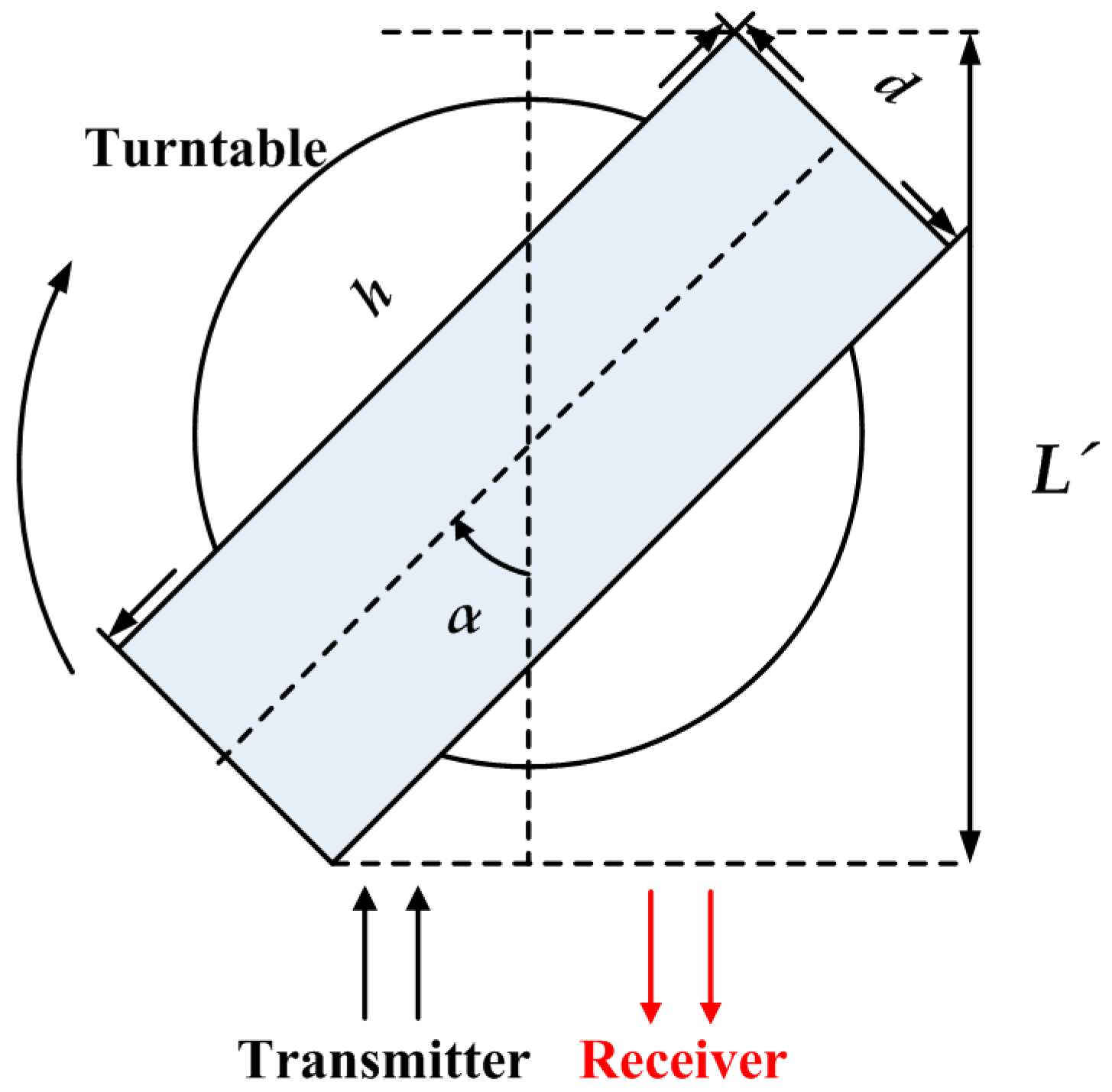
3.1. The Terahertz RCS Measurement System
3.2. The Experiments on a Metallic Cylinder
3.3. Data Processing and Calibration of Measurement Results
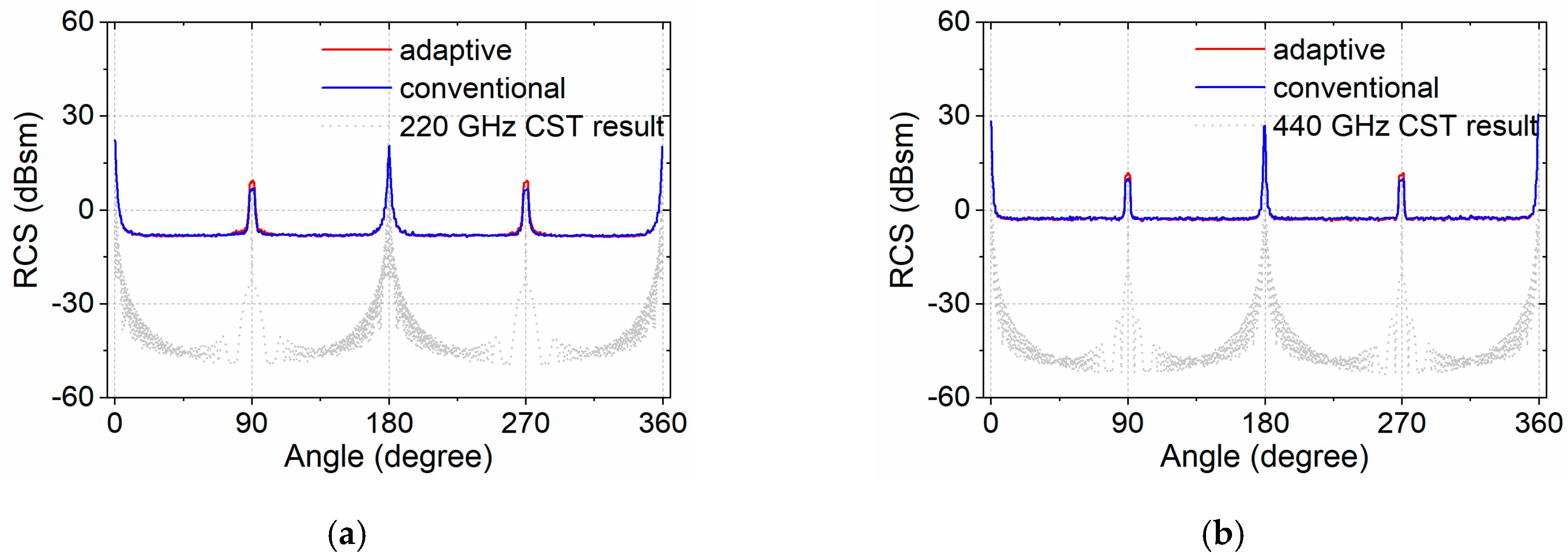
4. Experimental Results and Analysis
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Knott, E.F. Radar Cross Section; Artech House: Dedham, MA, USA, 1985. [Google Scholar]
- Ruan, Y.Z. Radar Cross Section and Stealth Technology; National Defense Industry Press: Beijing, China, 1998; pp. 6–10. [Google Scholar]
- Knott, E.F. Radar Cross Section Measurements; Van Nostrand Reinhold: New York, NY, USA, 1993. [Google Scholar]
- Dybdal, R.B. Radar Cross Section Measurements. IEEE Trans. Antennas Propag. 1987, 75, 498–516. [Google Scholar] [CrossRef]
- Cheng, Y.Q.; Zhou, X.L.; Xu, X.W.; Qin, Y.L.; Wang, H.Q. Radar Coincidence Imaging with Stochastic Frequency Modulated Array. IEEE J. Sel. Top. Signal Process. 2016, 99, 1. [Google Scholar] [CrossRef]
- Wang, H.Q.; Deng, B.; Qin, Y.L. Review of Terahertz Radar Technology. J. Radars 2018, 7, 1–21. [Google Scholar]
- Chopra, N.; Yang, K.; Abbasi, Q.H.; Qaraqe, K.; Philpott, M.; Alomainy, A. THz Time Domain Spectroscopy of Human Skin Tissue for In-Body Nano-networks. IEEE Trans. Terahertz Sci. Technol. 2016, 6, 803–809. [Google Scholar] [CrossRef]
- Iwaszczuk, K.; Heiselberg, H.; Jepsen, P. Terahertz Radar Cross Section Measurements. Opt. Express 2010, 18, 26399–26408. [Google Scholar] [CrossRef] [PubMed]
- Coulombe, M.J.; Horgan, T.; Waldman, J.; Szatowski, G.; Nixon, W. A 524 GHz Polarimetric Compact Range for Scale Model RCS Measurements. In Proceedings of the Antenna Measurement Techniques Association 21st Annual Meeting & Symposium (AMTA ‘99), Monterey Bay, CA, USA, 4–8 October 1999; pp. 458–463. [Google Scholar]
- Samoska, L.A. An Overview of Solid-State Integrated Circuit Amplifiers in the Submillimeter-Wave and THz Regime. IEEE Trans. Terahertz Sci. Technol. 2011, 1, 9–24. [Google Scholar] [CrossRef] [Green Version]
- Beaudoin, C.J.; Horgan, T.; Demartinis, G.; Coulombe, M.J.; Goyette, T.; Gatesman, A.J.; Nixon, W.E. A Prototype Fully Polarimetric 160-GHz Bistatic ISAR Compact Radar Range. In Proceedings of the SPIE 10188, Radar Sensor Technology XXI, Anaheim, California, CA, USA, 1 May 2017. [Google Scholar]
- Cooper, K.B.; Dengler, R.J.; Chattopadhyay, G.; Schlecht, E.; Gill, J.; Skalare, A.; Mehdi, I.; Siegel, P.H. A High-Resolution Imaging Radar at 580 GHz. IEEE Microw. Wirel. Compon. Lett. 2008, 18, 64–66. [Google Scholar] [CrossRef]
- Macfarlane, D.G.; Robertson, D.A.; Bryllert, T. Pathfinder—A High Resolution 220 GHz Imaging Radar Providing Phenomenological Data for Security Scanner Development. In Proceedings of the 2016 41st International Conference on Infrared, Millimeter, and Terahertz Waves (IRMMW-THz), Copenhagen, Denmark, 25–30 September 2016. [Google Scholar]
- Yang, Q.; Qin, Y.L.; Deng, B.; Wang, H.Q.; You, P. Micro-Doppler Ambiguity Resolution for Wideband Terahertz Radar Using Intra-Pulse Interference. Sensors 2017, 17, 993. [Google Scholar] [CrossRef] [PubMed]
- Chen, G.; Dang, H.X.; Tan, X.M.; Chen, H.; Cui, T.J. Scattering Properties of Electromagnetic Waves from Randomly Oriented Rough Metal Plate in the Lower Terahertz Region. J. Radars 2018, 7, 75–82. [Google Scholar]
- Song, Y.; Li, Y.P.; Pang, S.; Zhao, S.S.; Wang, H.Q. RCS Measurement at Terahertz Waves for Cylinders with Different Surface Roughness. Electron. Lett. 2018, 54, 714–716. [Google Scholar] [CrossRef]
- Choe, W.; Jeong, J. A Broadband THz On-Chip Transition Using a Dipole Antenna with Integrated Balun. Electronics 2018, 7, 236. [Google Scholar] [CrossRef]
- Siegel, P.H.; de Maagt, P.; Zaghloul, A.I. Antennas for Terahertz Applications. In Proceedings of the 2006 IEEE Antennas and Propagation Society International Symposium, Albuquerque, NM, USA, 9–14 July 2006. [Google Scholar]
- Zhang, X.L.; Li, N.J.; Hu, C.F.; Li, P. Scattering Characteristics Test and Imaging Diagnosis for Targets in Radar System; China Aerospace Publishing House: Beijing, China, 2009; pp. 1–47. [Google Scholar]
- Hu, C.F. Research on RCS Measurement System and Microwave Imaging Diagnosis Technology. Master’s Thesis, Northwestern Polytechnical University, Xi’an, China, March 2007. [Google Scholar]
- Li, Z.; Cui, T.J.; Zhong, X.J.; Tao, Y.B.; Lin, H. Electromagnetic Scattering Characteristics of PEC Targets in the Terahertz Regime. IEEE Antennas Propag. Mag. 2009, 51, 39–50. [Google Scholar]










© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pang, S.; Zeng, Y.; Yang, Q.; Deng, B.; Wang, H.; Qin, Y. Improvement in SNR by Adaptive Range Gates for RCS Measurements in the THz Region. Electronics 2019, 8, 805. https://doi.org/10.3390/electronics8070805
Pang S, Zeng Y, Yang Q, Deng B, Wang H, Qin Y. Improvement in SNR by Adaptive Range Gates for RCS Measurements in the THz Region. Electronics. 2019; 8(7):805. https://doi.org/10.3390/electronics8070805
Chicago/Turabian StylePang, Shuang, Yang Zeng, Qi Yang, Bin Deng, Hongqiang Wang, and Yuliang Qin. 2019. "Improvement in SNR by Adaptive Range Gates for RCS Measurements in the THz Region" Electronics 8, no. 7: 805. https://doi.org/10.3390/electronics8070805
APA StylePang, S., Zeng, Y., Yang, Q., Deng, B., Wang, H., & Qin, Y. (2019). Improvement in SNR by Adaptive Range Gates for RCS Measurements in the THz Region. Electronics, 8(7), 805. https://doi.org/10.3390/electronics8070805