Area-Efficient Error Detection Structure for Linear Feedback Shift Registers




Abstract
:1. Introduction
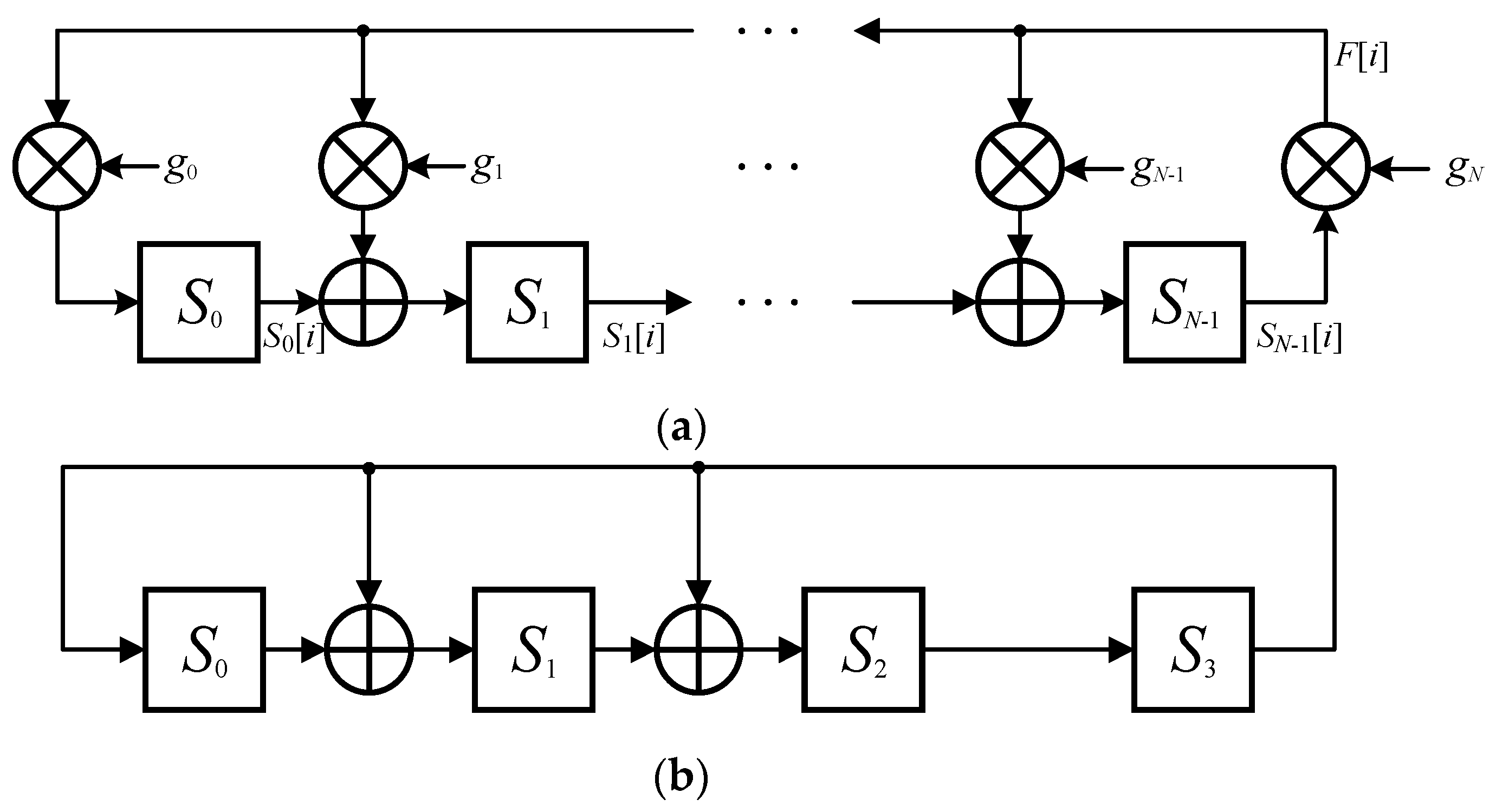
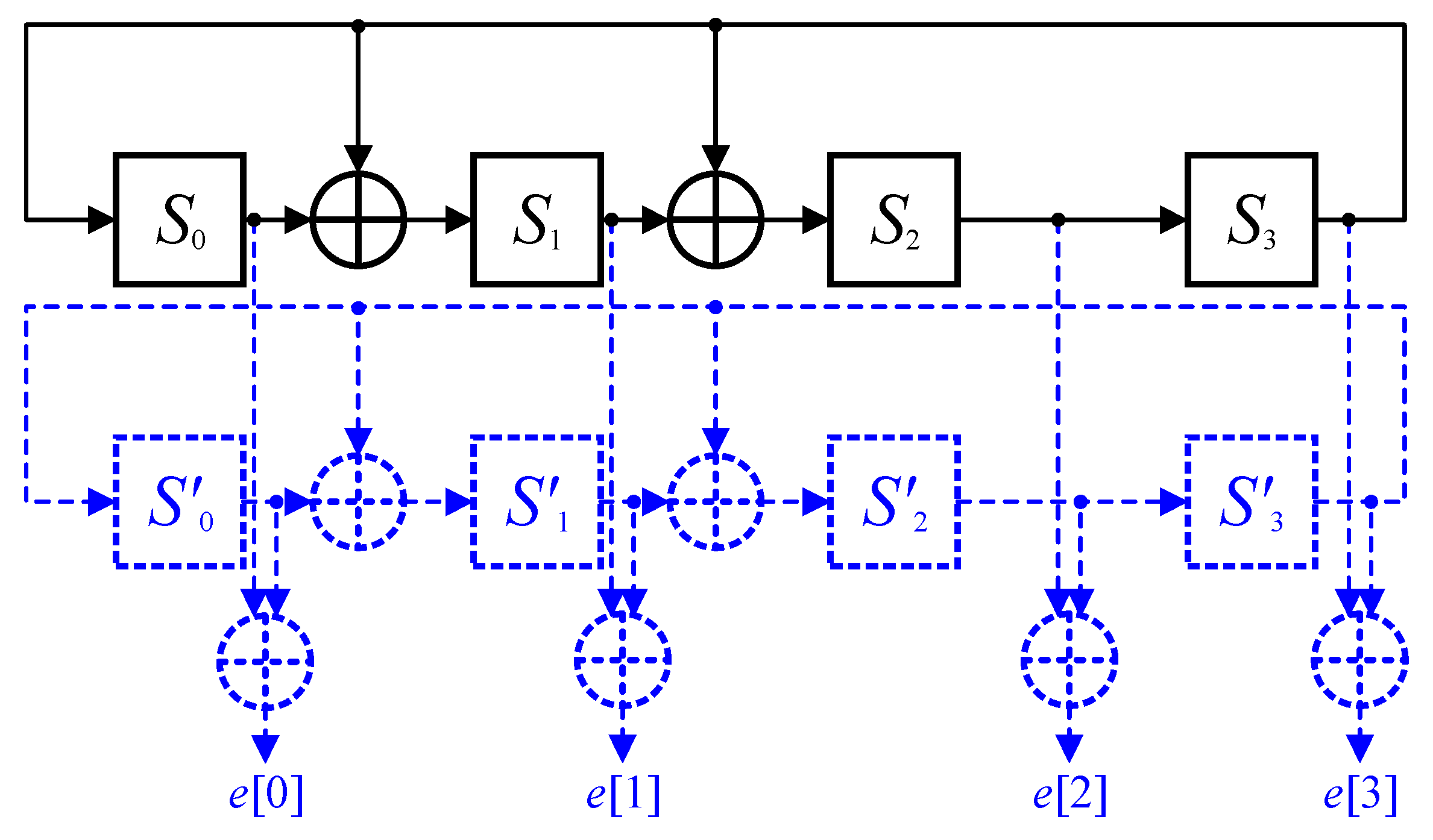
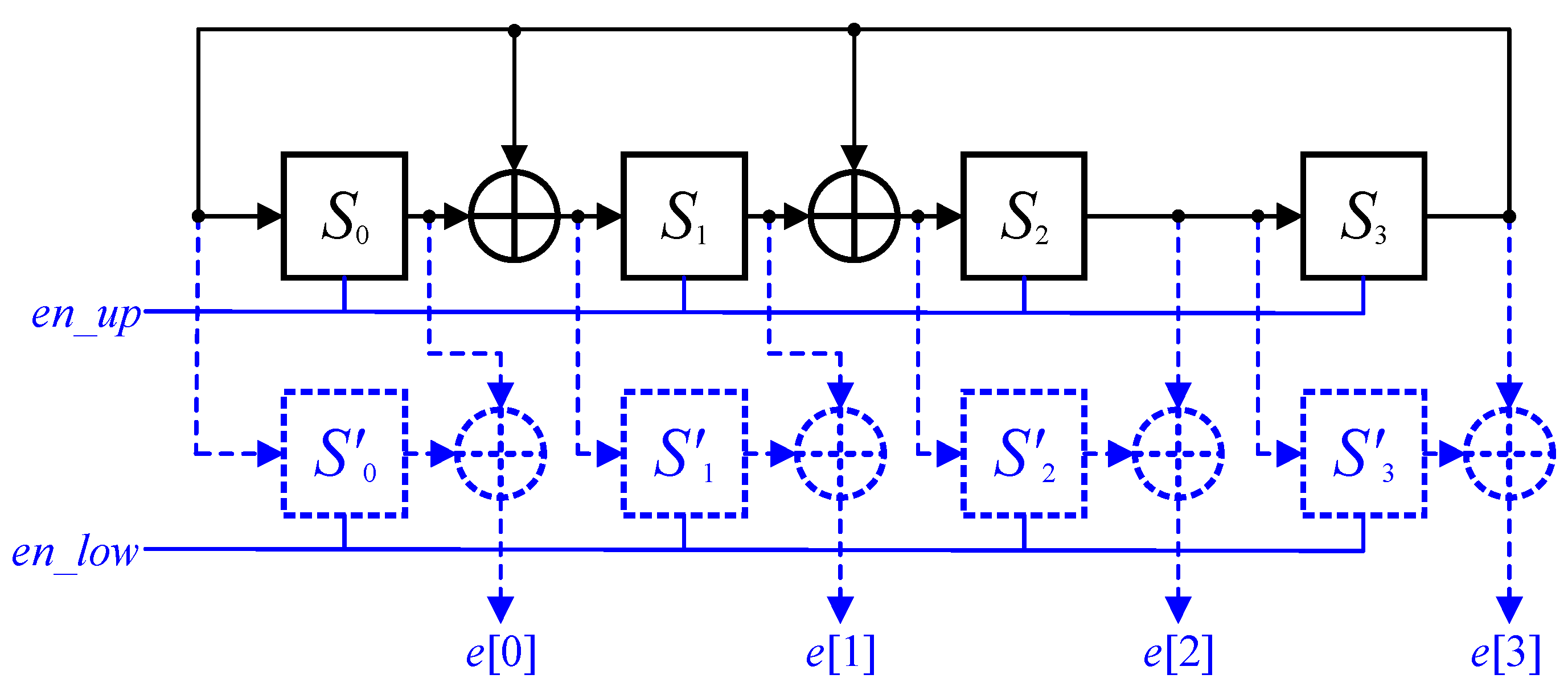
2. Existing Error Detection/Correction LFSRs
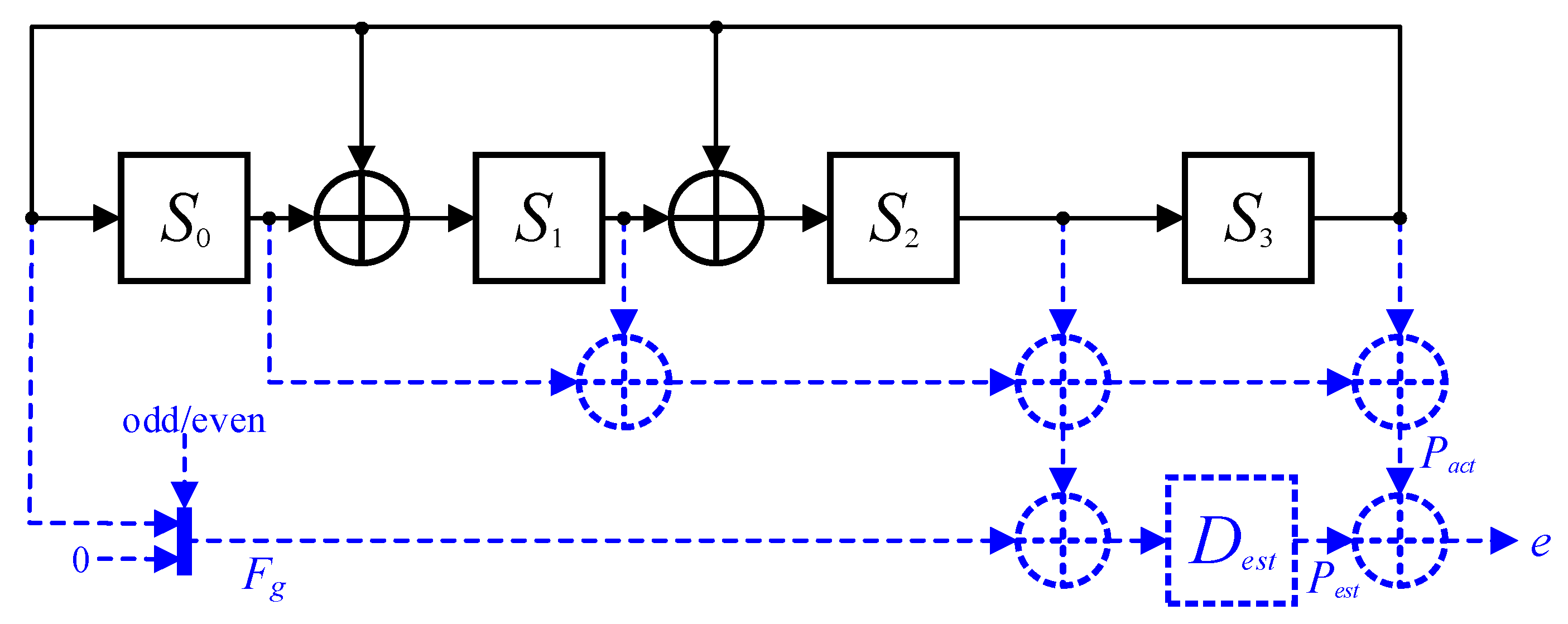
3. Proposed ED-LFSR
4. Experimental Results
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- He, Q.P.; Wang, J. Fault Detection Using the k-Nearest Neighbor Rule for Semiconductor Manufacturing Processes. IEEE Trans. Semicond. Manuf. 2007, 20, 345–354. [Google Scholar] [CrossRef]
- Cherry, G.A.; Qin, S.J. Multiblock principal component analysis based on a combined index for semiconductor fault detection and diagnosis. IEEE Trans. Semicond. Manuf. 2006, 19, 159–172. [Google Scholar] [CrossRef]
- Cangellaris, A.C.; Pinello, W.; Ruehli, A. Circuit-based description and modeling of electromagnetic noise effects in packaged low-power electronics. In Proceedings of the International Conference on Computer Design VLSI in Computers and Processors, Austin, TX, USA, 12–15 October 1997; pp. 136–142. [Google Scholar]
- Catt, I. Crosstalk (Noise) in Digital Systems. IEEE Trans. Electron. Comput. 1967, 16, 743–763. [Google Scholar] [CrossRef]
- Paul, B.C.; Roy, K. Testing cross-talk induced delay faults in static CMOS circuit through dynamic timing analysis. In Proceedings of the International Test Conference, Baltimore, MD, USA, 7–10 October 2002; pp. 384–390. [Google Scholar]
- O’Gorman, T.J.; Ross, J.M.; Taber, A.H.; Ziegler, J.F.; Muhlfeld, H.P.; Montrose, C.J.; Curtis, H.W.; Walsh, J.L. Field testing for cosmic ray soft errors in semiconductor memories. IBM J. Res. Dev. 1996, 40, 41–50. [Google Scholar] [CrossRef]
- Isermann, R.; Schwarz, R.; Stolzl, S. Fault-tolerant drive-by-wire systems. IEEE Control Syst. Mag. 2002, 22, 64–81. [Google Scholar]
- Baleani, M.; Ferrari, A.; Mangeruca, L.; Sangiovanni-Vincentelli, A.; Peri, M.; Pezzini, S. Fault-tolerant platforms for automotive safety-critical applications. In Proceedings of the 2003 international conference on Compilers, architectures and synthesis for embedded systems, San Jose, CA, USA, 30 October–1 November 2003; pp. 170–177. [Google Scholar]
- Cardarilli, G.C.; Ottavi, M.; Pontarelli, S.; Re, M.; Salsano, A. Fault tolerant solid state mass memory for space applications. IEEE Trans. Aerosp. Electron. Syst. 2005, 41, 1353–1372. [Google Scholar] [CrossRef]
- Cheng, C.; Parhi, K.K. High speed VLSI architecture for general linear feedback shift register (LFSR) structures. In Proceedings of the 2009 Conference Record of the Forty-Third Asilomar Conference on Signals, Systems and Computers, Pacific Grove, CA, USA, 1–4 November 2009; pp. 713–717. [Google Scholar]
- Aloisi, W.; Mita, R. Gated-Clock Design of Linear-Feedback Shift Registers. IEEE Trans. Circuits Syst. Π Express Briefs 2008, 55, 546–550. [Google Scholar] [CrossRef]
- Wang, L.-T.; McCluskey, E.J. Linear feedback shift register design using cyclic codes. IEEE Trans. Comput. 1988, 37, 1302–1306. [Google Scholar] [CrossRef]
- Bagalkoti, A.; Shirol, S.B.; Ramakrishna, S.; Kumar, P.; Rajashekar, B.S. Design and Implementation of 8-bit LFSR, Bit-Swapping LFSR and Weighted Random Test Pattern Generator: A Performance Improvement. In Proceedings of the 2019 International Conference on Intelligent Sustainable Systems (ICISS), Palladam, Tamilnadu, India, 21–22 February 2019; pp. 82–86. [Google Scholar]
- Sprachmann, M. Automatic generation of parallel CRC circuits. IEEE Des. Test Comput. 2001, 18, 108–114. [Google Scholar] [CrossRef]
- Jung, J.; Yoo, H.; Lee, Y.; Park, I.C. Efficient Parallel Architecture for Linear Feedback Shift Registers. IEEE Trans. Circuits Syst. Π Express Briefs 2015, 62, 1068–1072. [Google Scholar] [CrossRef]
- Ayinala, M.; Parhi, K.K. Efficient parallel VLSI architecture for linear feedback shift registers. 2010 IEEE Workshop Signal Process. Syst. 2010, 52–57. [Google Scholar]
- Ayinala, M.; Parhi, K.K. High-Speed Parallel Architectures for Linear Feedback Shift Registers. IEEE Trans. Signal Process. 2011, 59, 4459–4469. [Google Scholar] [CrossRef]
- Lowy, M. Parallel implementation of linear feedback shift registers for low power applications. IEEE Trans. Circuits Syst. Π Analog Digit. Signal Process. 1996, 43, 458–466. [Google Scholar] [CrossRef]
- Zhang, X. A Low-Power Parallel Architecture for Linear Feedback Shift Registers. IEEE Trans. Circuits Syst. Π Express Briefs 2019, 66, 412–416. [Google Scholar] [CrossRef]
- Katti, R.S.; Ruan, X.; Khattri, H. Multiple-output low-power linear feedback shift register design. IEEE Trans. Circuits Syst. I Regul. Pap. 2006, 53, 1487–1495. [Google Scholar] [CrossRef] [Green Version]
- Kumar, G.S.; Saminadan, V. Low Power LFSR for BIST Applications. In Proceedings of the 2018 Second International Conference on Intelligent Computing and Control Systems (ICICCS), Madurai, India, 14–15 June 2018; pp. 1979–1984. [Google Scholar]
- Abu-Issa, A.S.; Quigeley, S.F. Bit-swapping LFSR for low-power BIST. Electron. Lett. 2008, 44, 401–403. [Google Scholar] [CrossRef]
- Nourani, M.; Tehranipoor, M.; Ahmed, N. Low-Transition Test Pattern Generation for BIST-Based Applications. IEEE Trans. Comput. 2008, 57, 303–315. [Google Scholar] [CrossRef]
- Kitsos, P.; Sklavos, N.; Zervas, N.; Koufopavlou, O. A reconfigurable linear feedback shift register (LFSR) for the Bluetooth system. In Proceedings of the 8th IEEE International Conference on Electronics, Circuits and Systems, Malta, Malta, 2–5 September 2001; pp. 991–994. [Google Scholar]
- Lin, S.; Costello, D.J. Error Control Coding, 2nd ed.; Pearson India: Englewood Cliffs, NJ, USA, 2004; pp. 92–94. [Google Scholar]
- Mohanram, K.; Sogomonyan, E.S.; Gossel, M.; Touba, N.A. Synthesis of low-cost parity-based partially self-checking circuits. In Proceedings of the 9th IEEE On-Line Testing Symposium, Kos Island, Greece, 7–9 July 2003; pp. 35–40. [Google Scholar]
- Kubalik, P.; Fiser, P.; Kubatova, H. Fault tolerant system design method based on self-checking circuits. In Proceedings of the 12th IEEE International On-Line Testing Symposium, Lake Como, Italy, 10–12 July 2006. [Google Scholar]
- Johnson, B.W.; Aylor, J.H.; Hana, H.H. Efficient Use of Time and Hardware Redundancy for Concurrent Error Detection in a 32-bit VLSI Adder. IEEE J. Solid State Circuits 1988, 23, 208–215. [Google Scholar] [CrossRef]
- Fuhrman, C.P.; Chutani, S.; Nussbaumer, H.J. Hardware/software fault tolerance with multiple task modular redundancy. In Proceedings of the IEEE Symposium on Computers and Communications, Alexandria, Egypt, 27–29 July 1995; pp. 171–177. [Google Scholar]
- She, X.; McElvain, K.S. Time Multiplexed Triple Modular Redundancy for Single Event Upset Mitigation. IEEE Trans. Nucl. Sci. 2009, 56, 2443–2448. [Google Scholar] [CrossRef]
- Antola, A.; Negrini, R.; Sami, M.G.; Scarabottolo, N. Fault Tolerance in FFT Arrays: Time Redundancy Approaches. J. Vlsi Signal Process. 1992, 4, 295–316. [Google Scholar] [CrossRef]
- Nicolaidis, M. Time redundancy based soft-error tolerance to rescue nanometer technologies. In Proceedings of the 17th IEEE VLSI Test Symposium, Dana Point, CA, USA, 25–29 April 1999; pp. 86–94. [Google Scholar]
- Bin Talib, G.H.; El-Maleh, A.H.; Sait, S.M. Design of Fault Tolerant Adders: A Review. Arab. J. Sci. Eng. 2018, 43, 6667–6692. [Google Scholar] [CrossRef]
- Valinataj, M.; Mirshekar, M.; Jazayeri, H. Novel low-cost and fault-tolerant reversible logic adders. Comput. Electr. Eng. 2016, 53, 56–72. [Google Scholar] [CrossRef]
- Babu, H.H.; Jamal, L.; Saleheen, N. An efficient approach for designing a reversible fault tolerant n-bit carry look-ahead adder. In Proceedings of the 2013 IEEE International SOC Conference, Erlangen, Germany, 4–6 September 2013; pp. 98–103. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Conventional | Hardware Redundancy | Time Redundancy | Proposed | |
|---|---|---|---|---|
| 8-bit | 107.1 | 224.9 | 203.6 | 134.1 |
| 16-bit | 202.9 | 431.2 | 387.3 | 251.2 |
| 32-bit | 399.9 | 847.2 | 769.3 | 497.1 |
| 64-bit | 780.3 | 1653.4 | 1502.5 | 1023.1 |
| Physical Metrics | Conventional | Hardware Redundancy | Time Redundancy | Proposed |
|---|---|---|---|---|
| Area [A] | 7786.99 μm2 | 16,499.19 μm2 | 14,994.06 μm2 | 10,209.15 μm2 |
| Equivalent Gate Count | 780.34 | 1653.43 | 1502.52 | 1023.14 |
| Power Consumption [B] | 0.71 mW | 1.26 mW | 1.49 mW | 0.84 mW |
| Critical-Path Delay | 3.74 ns | 3.90 ns | 3.74 ns | 3.99 ns |
| Throughput [C] | 267.37 Mbps | 256.41 Mbps | 133.69 Mbps | 250.63 Mbps |
| Normalized Metric [D] * | 1.00 | 0.26 | 0.13 | 0.60 |
| Conventional | Hardware Redundancy | Time Redundancy | Proposed | |
|---|---|---|---|---|
| Register | N | 2N | 2N | N + 1 |
| XOR | G | 2G + N | G + N | G + N + 1 |
| MUX | - | - | - | 1 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shin, H.; Choi, S.; Park, J.; Kong, B.Y.; Yoo, H. Area-Efficient Error Detection Structure for Linear Feedback Shift Registers. Electronics 2020, 9, 195. https://doi.org/10.3390/electronics9010195
Shin H, Choi S, Park J, Kong BY, Yoo H. Area-Efficient Error Detection Structure for Linear Feedback Shift Registers. Electronics. 2020; 9(1):195. https://doi.org/10.3390/electronics9010195
Chicago/Turabian StyleShin, Hwasoo, Soyeon Choi, Jiwoon Park, Byeong Yong Kong, and Hoyoung Yoo. 2020. "Area-Efficient Error Detection Structure for Linear Feedback Shift Registers" Electronics 9, no. 1: 195. https://doi.org/10.3390/electronics9010195
APA StyleShin, H., Choi, S., Park, J., Kong, B. Y., & Yoo, H. (2020). Area-Efficient Error Detection Structure for Linear Feedback Shift Registers. Electronics, 9(1), 195. https://doi.org/10.3390/electronics9010195