Fault Diagnosis Reasoning Algorithm for Electromechanical Actuator Based on an Improved Hybrid TFPG Model


Abstract
:1. Introduction
2. TFPG Model
2.1. Basic Knowledge of the TFPG Model
- (1)
- The fault mode is the root node, which can be only the source node of the fault propagation path, but not the target node;
- (2)
- Self-circulation is not included;
- (3)
- Each node is connected to at least one fault propagation path;
- (4)
- The fault propagation path has no memory and will not fail.
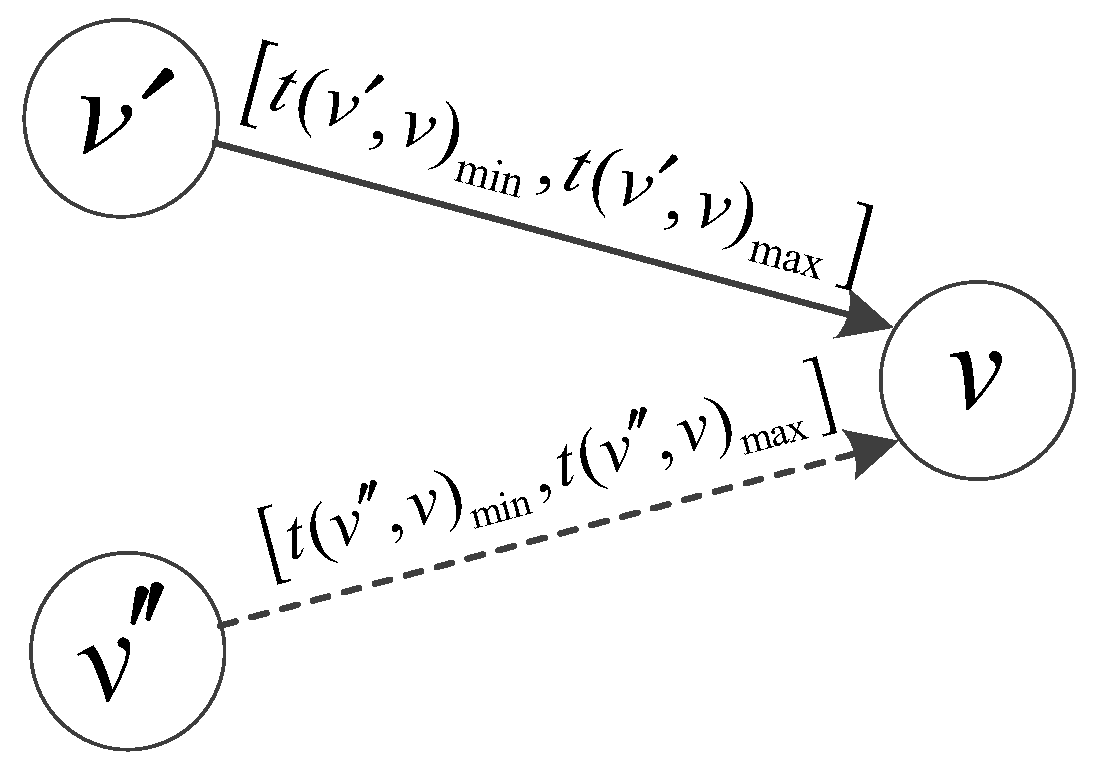
2.2. Causal Relationship
- , whereis activated at time;
- , that is, when any parent nodeof the discrepancy nodeis activated, the edgeis also activated.

2.3. Storage of the Hybrid TFPG Model
3. Fault Diagnosis Algorithm Based on Hybrid TFPG
3.1. Hypothesis Initialization
| Algorithm 1. Hypothesis initialization algorithm based on alarm triggering. |
|
3.1.1. Algorithm 2: Backward Extension Algorithm
| Algorithm 2. |
|
3.1.2. Algorithm 3: Forward Expansion Algorithm
| Algorithm 3. |
|
3.1.3. Algorithm 4: Search Algorithm for Missing Alarm Nodes
| Algorithm 4. |
|
3.2. Hypothesis Updating
| Algorithm 5.Hypothesis updating algorithm based on new alarm triggering. |
|
3.3. Hypothesis Ranking
4. Case Analysis
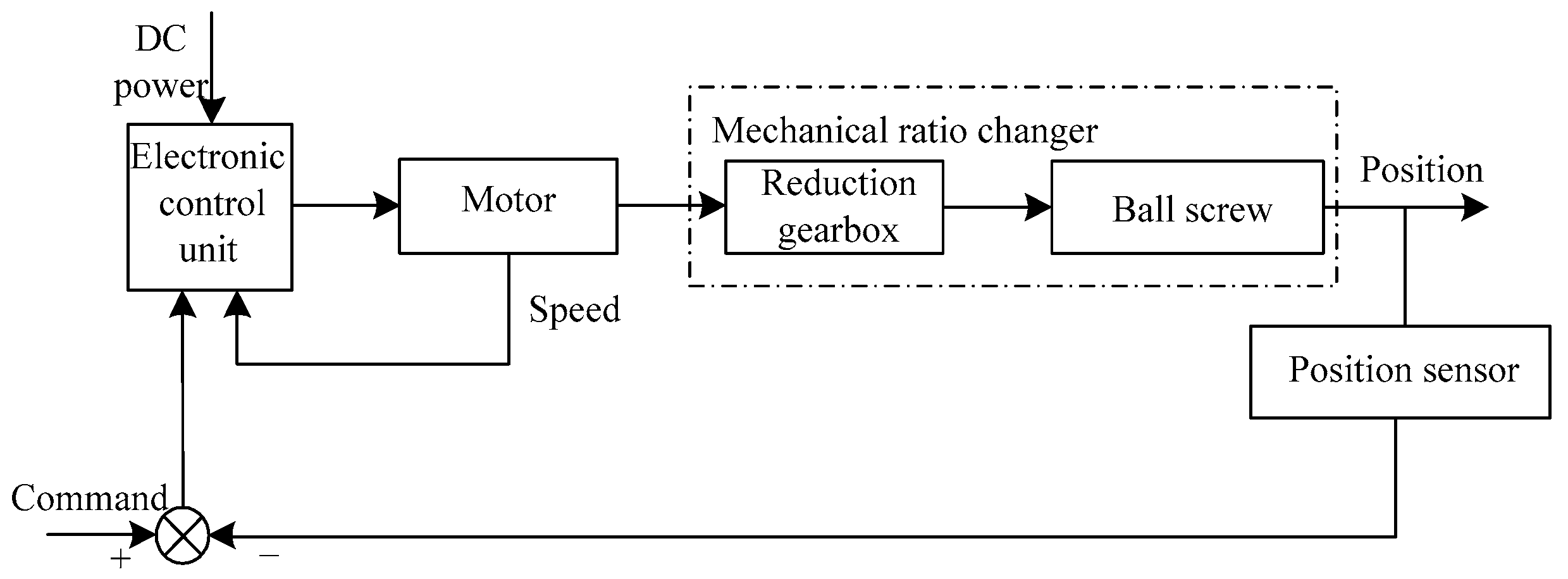
4.1. Working Principle of the Electromechanical Actuator
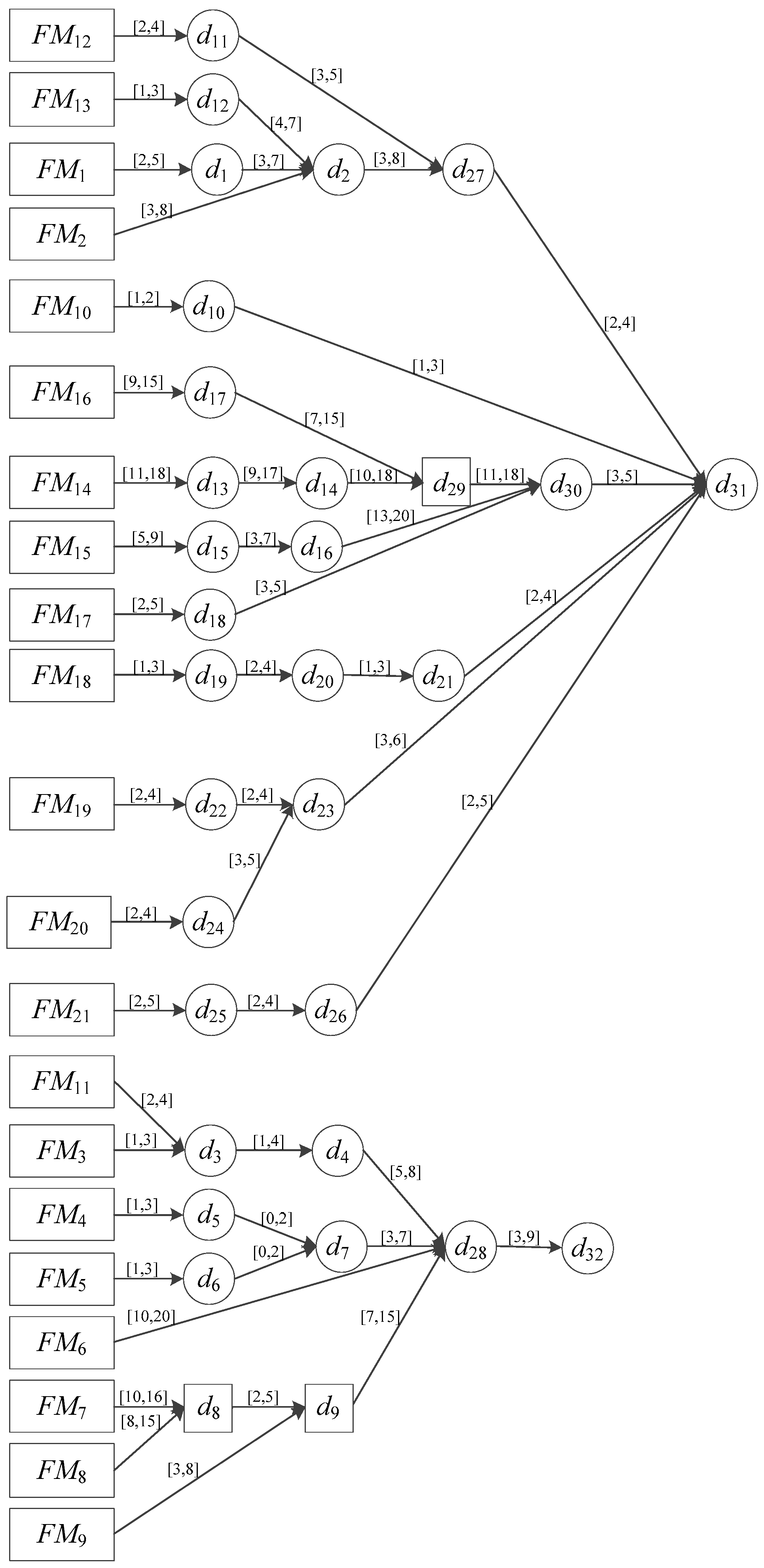
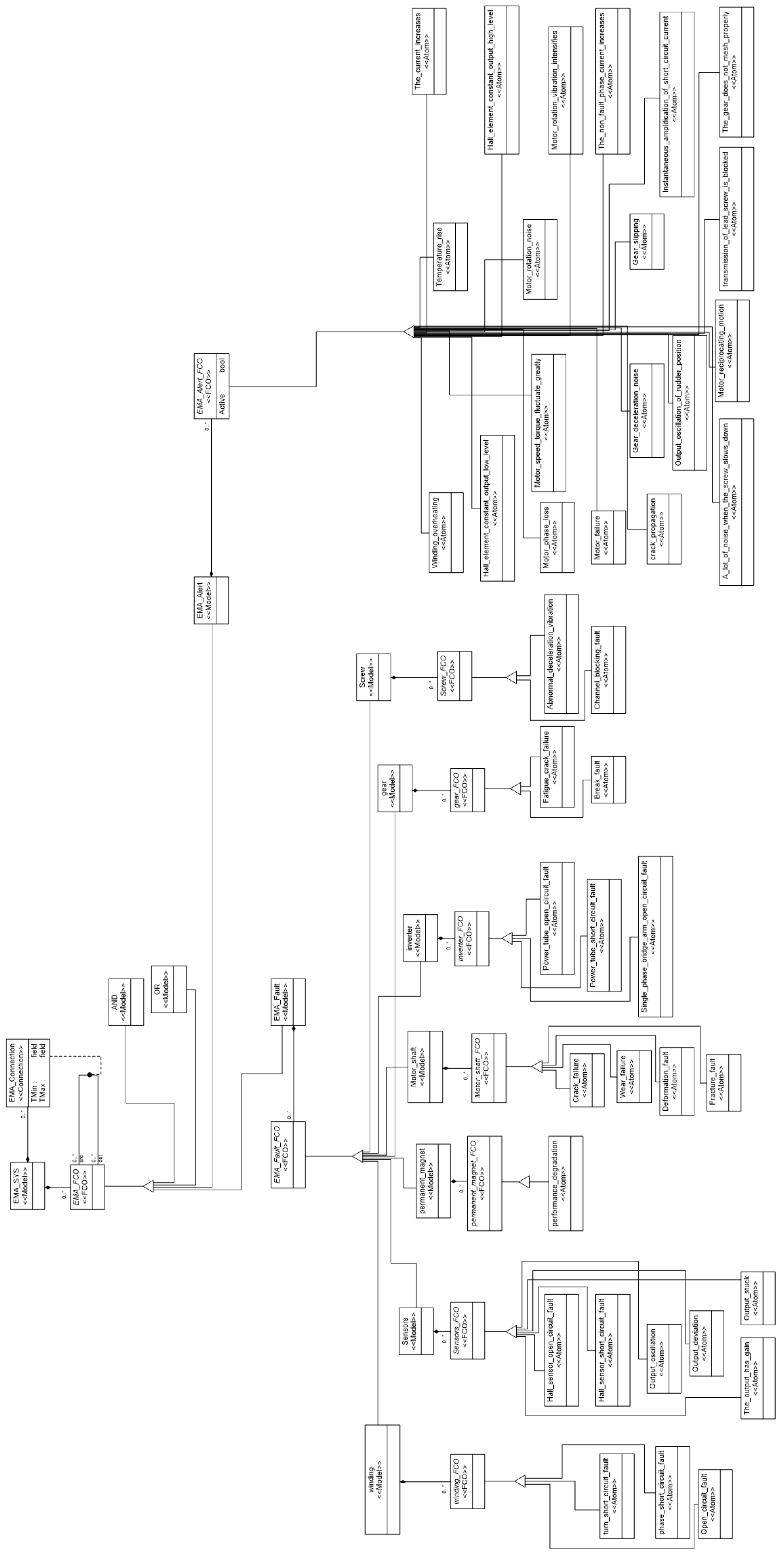
4.2. EMA Hybrid TFPG Model
4.3. GME Modeling
4.4. Simulation
4.4.1. Digital Simulation
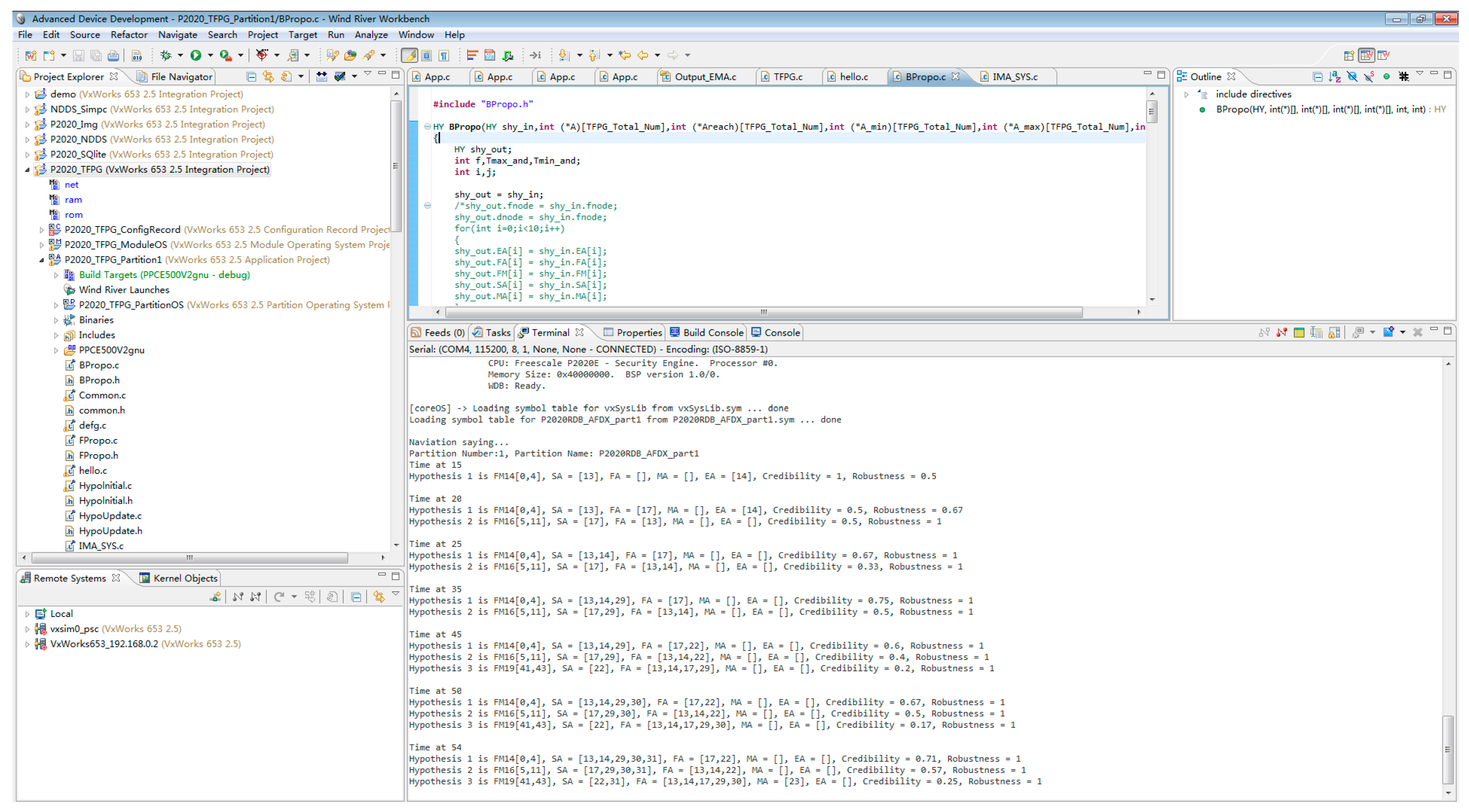
- (1)
- When , an alarm occurs at , which produces Hypothesis 1. Potentially, will occur at and will alarm.
- (2)
- gives an alarm when . Since the alarm cannot be explained by Hypothesis 1, Hypothesis 2 is generated and is added to the FA set of Hypothesis 1.
- (3)
- triggers an alarm at , and Hypothesis 3 is added.
- (4)
- gives an alarm when . For Hypothesis 3, the alarm for is missing.
- (5)
- Finally, the reliability of Hypothesis 1 is found to be higher than that of other hypotheses and is considered to be the actual fault. As time passes, the credibility of Hypothesis 1 is assumed not to be 1, resulting from the false alarm and missed the alarm.
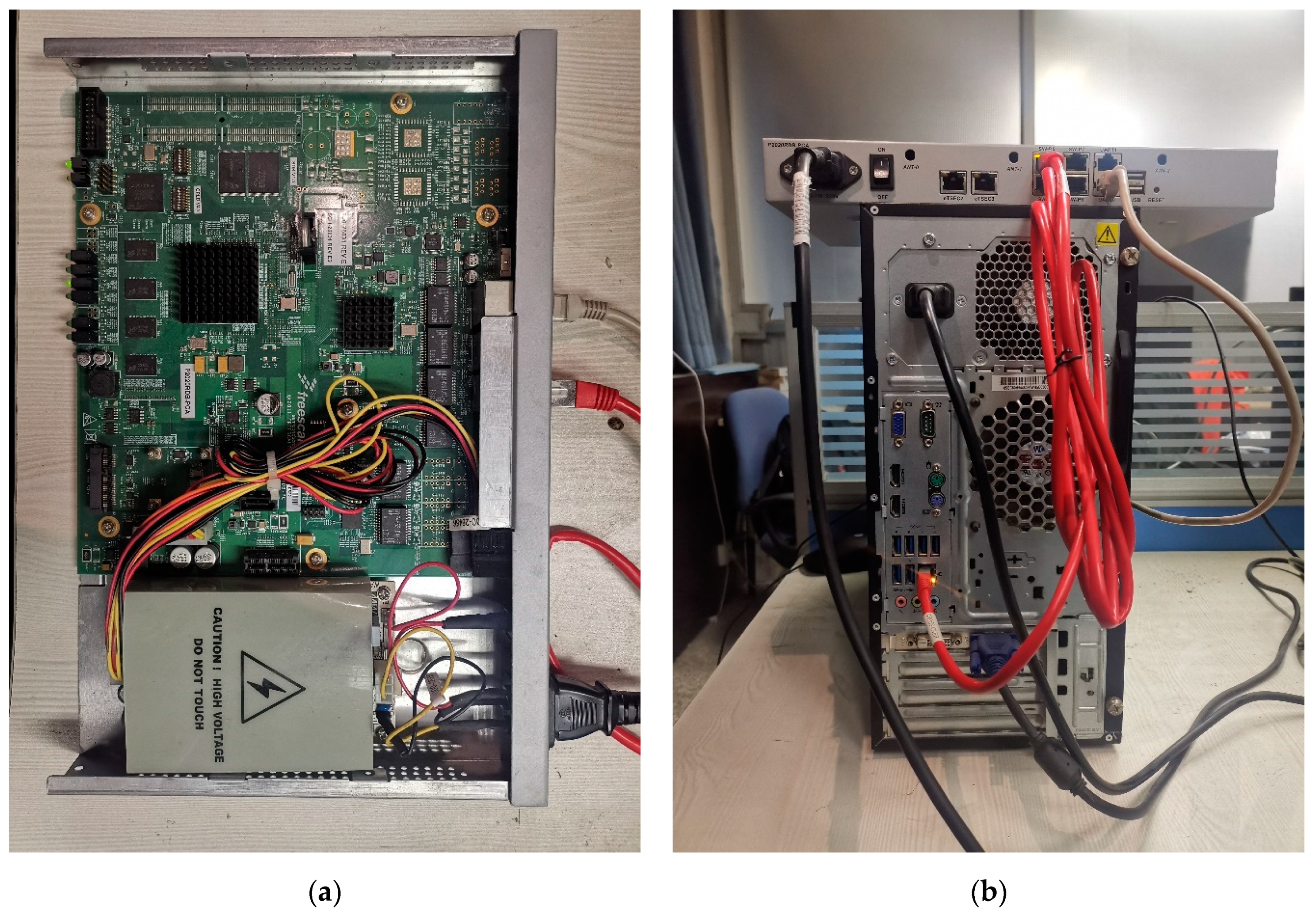
4.4.2. Real-Time Simulation
5. Conclusions
6. Outlooks and Discussion
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Node | Description |
|---|---|
| Winding inter-turn short fault | |
| Winding phase-to-phase short fault | |
| Winding open fault | |
| Hall sensor open fault | |
| Hall sensor short fault | |
| Permanent magnet performance degradation | |
| Motor shaft crack | |
| Motor shaft wear | |
| Motor shaft deformation | |
| Motor shaft broken | |
| Inverter power tube open | |
| Inverter power tube short | |
| Inverter single bridge open | |
| Gear fatigue crack | |
| Gear broken | |
| Abnormal deceleration vibration of ball screw | |
| Screw channel blocked | |
| Sensor output oscillation | |
| Sensor output deviation | |
| Sensor output gained | |
| Sensor output fixed | |
| Temperature rise | |
| Winding overheat | |
| Current increasing | |
| Large motor speed and torque fluctuation | |
| Hall output high | |
| Hall output low | |
| Motor phase shortage | |
| Motor rotation noises | |
| Motor rotation vibration intense | |
| Motor failure | |
| Instant increase in short circuit current | |
| Non-fault phase currents increasing | |
| Crack propagation | |
| Gear noises increasing | |
| Gear slipping | |
| Bad gear meshing | |
| Screw noises increasing | |
| Ball screw blocked | |
| Surface output oscillation | |
| Motor reciprocating | |
| Mechanical ratio changer reciprocating | |
| Constant surface output deviation | |
| Control forced to correct errors | |
| Surface output scaled | |
| Surface output fixed | |
| Control error increasing | |
| Motor burn down | |
| Low motor efficiency | |
| Low deceleration efficiency | |
| Mechanical ratio changer failure | |
| Task failure | |
| Task affected |
References
- Huang, L.G.; Yu, T.; Jiao, Z.X.; Li, Y.P. Active Load-Sensitive Electro-Hydrostatic Actuator for More Electric Aircraft. Appl. Sci. 2020, 10, 6978. [Google Scholar] [CrossRef]
- Balaban, E.; Saxena, A.; Narasimhan, S.; Roychoudhury, I.; Koopmans, M.; Ott, C.; Goebel, K. Prognostic health management system development for electromechanical actuators. J. Aerosp. Inf. Syst. 2015, 12, 329–344. [Google Scholar] [CrossRef] [Green Version]
- Fu, J.; Maré, J.C.; Fu, Y.L. Modelling and simulation of flight control electromechanical actuators with special focus on model architecting, multidisciplinary effects and power flows. Chin. J. Aeronaut. 2017, 30, 47–65. [Google Scholar] [CrossRef] [Green Version]
- Merzouki, R.; Cadiou, J.C. Estimation of backlash phenomenon in the electromechanical actuator. Control Eng. Pract. 2005, 13, 973–983. [Google Scholar] [CrossRef]
- Qiao, G.; Liu, G.; Shi, Z. A review of electromechanical actuators for more/all electric aircraft systems. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2017, 232, 4128–4151. [Google Scholar] [CrossRef] [Green Version]
- Misra, A. Sensor-Based Diagnosis of Dynamical Systems; Vanderbilt University: Nashville, TN, USA, 1994. [Google Scholar]
- Strasser, S.; Sheppard, J.W. Diagnostic Alarm Sequence Maturation in Timed Failure Propagation Graph; IEEE Autotestcon: Baltimore, MD, USA, 2011; pp. 158–165. [Google Scholar]
- Abdelwahed, S.; Karsai, G.; Biswas, G. System diagnosis using hybrid failure propagation graphs. In Proceedings of the 15th International Workshop Principles Diagnosis, Carcassonne, France, 23–25 June 2004. [Google Scholar]
- Abdelwahed, S.; Karsai, G.; Biswas, G. A consistency-based robust diagnosis approach for temporal causal systems. In Proceedings of the 16th International Workshop Principles Diagnosis, Pacific Grove, CA, USA, 1–3 June 2005; pp. 73–79. [Google Scholar]
- Mahadevan, N.; Abdelwahed, S.; Dubey, A. Distributed diagnosis of complex systems using timed failure propagation graph models. In Proceedings of the IEEE Systems Readiness Technology Conference, Orlando, FL, USA, 13–16 September 2010; pp. 124–129. [Google Scholar]
- Ge, X.Y.; Shen, G.H.; Huang, Z.Q.; Deng, L.M.; Wang, W.J. A hazard analysis method based on failure propagation model. Comput. Eng. Sci. 2019, 041, 1026–1033. [Google Scholar]
- Bozzano, M.; Cimatti, A.; Gario, M. SMT-based validation of timed failure propagation graphs. In Proceedings of the Twenty-Ninth Aaai Conference on Artificial Intelligence, Austin, TX, USA, 25–30 January 2015. [Google Scholar]
- Abdelwahed, S.; Karsai, G. Failure Prognosis Using Timed Failure Propagation Graphs. In Proceedings of the Annual Conference of the Prognostics and Health Management Society, San Diego, CA, USA, 27 September–1 October 2009. [Google Scholar]
- Abdelwahed, S.; Karsai, G. Notions of Diagnosability for Timed Failure Propagation Graphs; IEEE Autotestcon: Anaheim, CA, USA, 2006. [Google Scholar]
- Bittner, B.; Bozzano, M.; Cimatti, A. Automated synthesis of timed failure propagation graphs. In Proceedings of the International Joint Conference on Artificial Intelligence, New York, NY, USA, 9–15 July 2016. [Google Scholar]
- Priesterjahn, C.; Heinzemann, C.; Schafer, W. From timed automata to timed failure propagation graphs. In Proceedings of the IEEE International Symposium on Object/component/service-oriented Real-time Distributed Computing, Paderborn, Germany, 19–21 June 2013. [Google Scholar]
- Oonk, S.; Maldonado, F.J. Automated Maintenance Path Generation with Bayesian Networks, Influence Diagrams, and Timed Failure Propagation Graphs; IEEE Autotestcon: Anaheim, CA, USA, 2016. [Google Scholar]
- Troiano, L.; Cerbo, A.D.; Tipaldi, M. Fault detection and resolution based on extended time failure propagation graphs. In Proceedings of the International Conference on Soft Computing & Pattern Recognition, Fukuoka, Japan, 13–15 November 2015. [Google Scholar]
- Dubey, A.; Karsai, G.; Mahadevan, N. Model-based software health management for real-time systems. In Proceedings of the 2011 Aerospace Conference, Big Sky, MT, USA, 5–12 March 2011. [Google Scholar]
- Hayden, S.; Oza, N.; Mah, R. Diagnostic Technology Evaluation Report for on-Board Crew Launch Vehicle; NASA Technical Report; Ames Research Center: Moffett Field, CA, USA, 2006. [Google Scholar]
- Ofsthun, S.C.; Abdelwahed, S. Practical applications of timed failure propagation graphs for vehicle diagnosis. In Proceedings of the 2007 IEEE Autotestcon, Baltimore, MD, USA, 17–20 September 2007; pp. 250–259. [Google Scholar]
- Abdelwahed, S.; Karsai, G.; Mahadevan, N. Practical Implementation of Diagnosis Systems Using Timed Failure Propagation Graph Models. IEEE Trans. Instrum. Meas. 2009, 58, 240–247. [Google Scholar] [CrossRef]
- Bittner, B.; Bozzano, M.; Cimatti, A. Timed failure propagation analysis for spacecraft engineering: The ESA Solar Orbiter Case Study. In Proceedings of the International Symposium on Model-Based Safety and Assessment 2017, Trento, Italy, 11–13 September 2017; pp. 255–271. [Google Scholar]
- Troiano, L.; Tipaldi, M.; Di, C.A. Satellite FDIR practices using timed failure propagation graphs. In Proceedings of the 63rd International Astronautical Congress, Naples, Italy, 1–5 October 2012; pp. 8524–8531. [Google Scholar]
- Xie, W.Q.; Cai, Y.W.; Xing, X.C.; Xin, C.J. Algorithm design of failure diagnosis reasoned for software health management system. Meas. Control Technol. 2014, 33, 119–123. [Google Scholar]
- Conductor, Inc. Freescale Semiconductor Corp. In P2020 QorIQ Integrated Processor Reference Manual; Free-Scale Semiconductor: Austin, TX, USA, 2009. [Google Scholar]











| Name | Graphic Representation | Name | Graphic Representation |
|---|---|---|---|
| Failure mode |  | Edge |  |
| Discrepancy node |  | Propagation time constraint | [t.min,t.max] |
| AND discrepancy node |  | OR discrepancy node |  |
| Time | Alarm | Hypothesis | FM | SA | FA | MA | EA | Credibility | Robustness |
|---|---|---|---|---|---|---|---|---|---|
| 15 | 1 | 13 | 14 | 1 | 0.5 | ||||
| 20 | 1 | 13 | 17 | 14 | 0.5 | 0.67 | |||
| 2 | 17 | 13 | 0.5 | 1 | |||||
| 25 | 1 | 13, 14 | 17 | 0.67 | 1 | ||||
| 2 | 17 | 13, 14 | 0.33 | 1 | |||||
| 35 | 1 | 13, 14, 29 | 17 | 0.75 | 1 | ||||
| 2 | 17, 29 | 13, 14 | 0.5 | 1 | |||||
| 45 | 1 | 13, 14, 29 | 17, 22 | 0.6 | 1 | ||||
| 2 | 17, 29 | 13, 14, 22 | 0.4 | 1 | |||||
| 3 | 22 | 13, 14, 17, 29 | 0.2 | 1 | |||||
| 50 | 1 | 13, 14, 29, 30 | 17, 22 | 0.67 | 1 | ||||
| 2 | 17, 29, 30 | 13, 14, 22 | 0.5 | 1 | |||||
| 3 | 22 | 13, 14, 17, 29, 30 | 0.17 | 1 | |||||
| 54 | 1 | 13, 14, 29, 30, 31 | 17, 22 | 0.71 | 1 | ||||
| 2 | 17, 29, 30, 31 | 13, 14, 22 | 0.57 | 1 | |||||
| 3 | 22, 31 | 13, 14, 17, 29, 30 | 23 | 0.25 | 1 |
| Time | Alarm | Hypothesis | FM | SA | FA | MA | EA | Credibility | Robustness |
|---|---|---|---|---|---|---|---|---|---|
| 15 | 1 | 13 | 14 | 1 | 0.5 | ||||
| 25 | 1 | 13, 14 | 17 | 0.67 | 1 | ||||
| 35 | 1 | 13, 14, 29 | 17 | 0.75 | 1 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cao, Y.; Lyu, Y.; Wang, X. Fault Diagnosis Reasoning Algorithm for Electromechanical Actuator Based on an Improved Hybrid TFPG Model. Electronics 2020, 9, 2153. https://doi.org/10.3390/electronics9122153
Cao Y, Lyu Y, Wang X. Fault Diagnosis Reasoning Algorithm for Electromechanical Actuator Based on an Improved Hybrid TFPG Model. Electronics. 2020; 9(12):2153. https://doi.org/10.3390/electronics9122153
Chicago/Turabian StyleCao, Yuyan, Yongxi Lyu, and Xinmin Wang. 2020. "Fault Diagnosis Reasoning Algorithm for Electromechanical Actuator Based on an Improved Hybrid TFPG Model" Electronics 9, no. 12: 2153. https://doi.org/10.3390/electronics9122153
APA StyleCao, Y., Lyu, Y., & Wang, X. (2020). Fault Diagnosis Reasoning Algorithm for Electromechanical Actuator Based on an Improved Hybrid TFPG Model. Electronics, 9(12), 2153. https://doi.org/10.3390/electronics9122153