Dynamic Surface Backstepping Control for Voltage Source Converter-High Voltage Direct Current Transmission Grid Side Converter Systems


Abstract
:1. Introduction
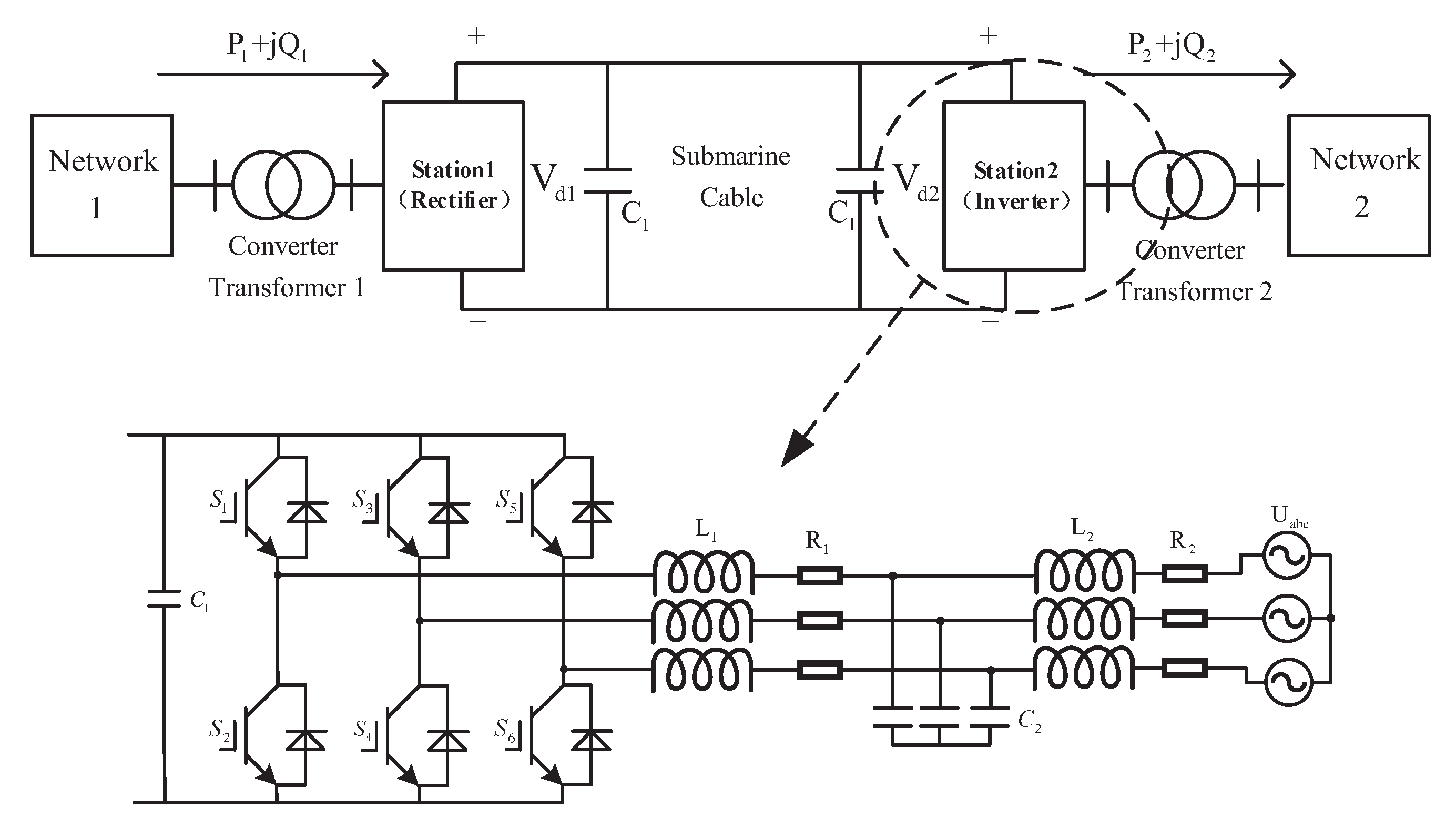
2. Mathematical Model and Preliminaries
3. Dynamic Surface Backstepping Controller Design
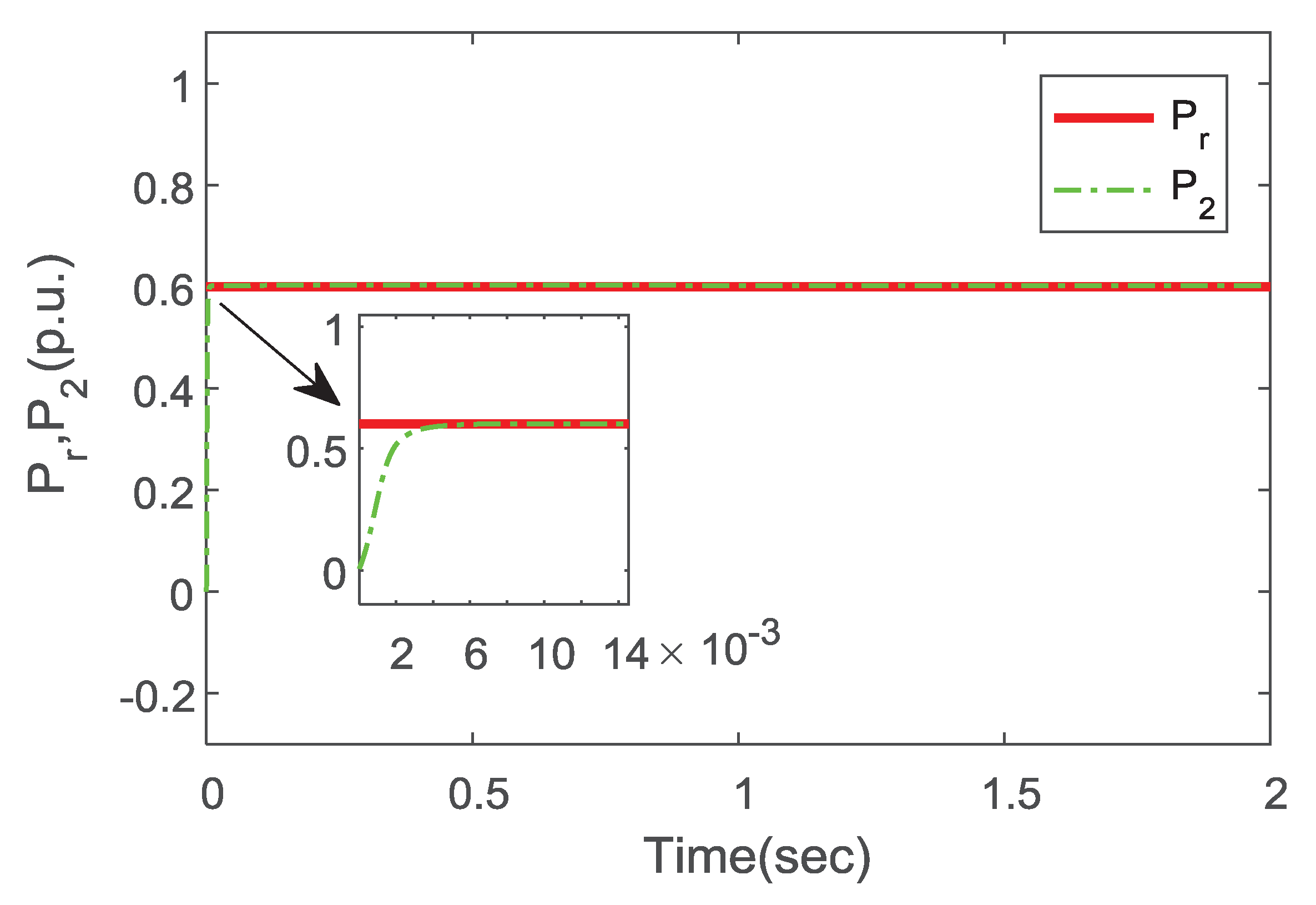
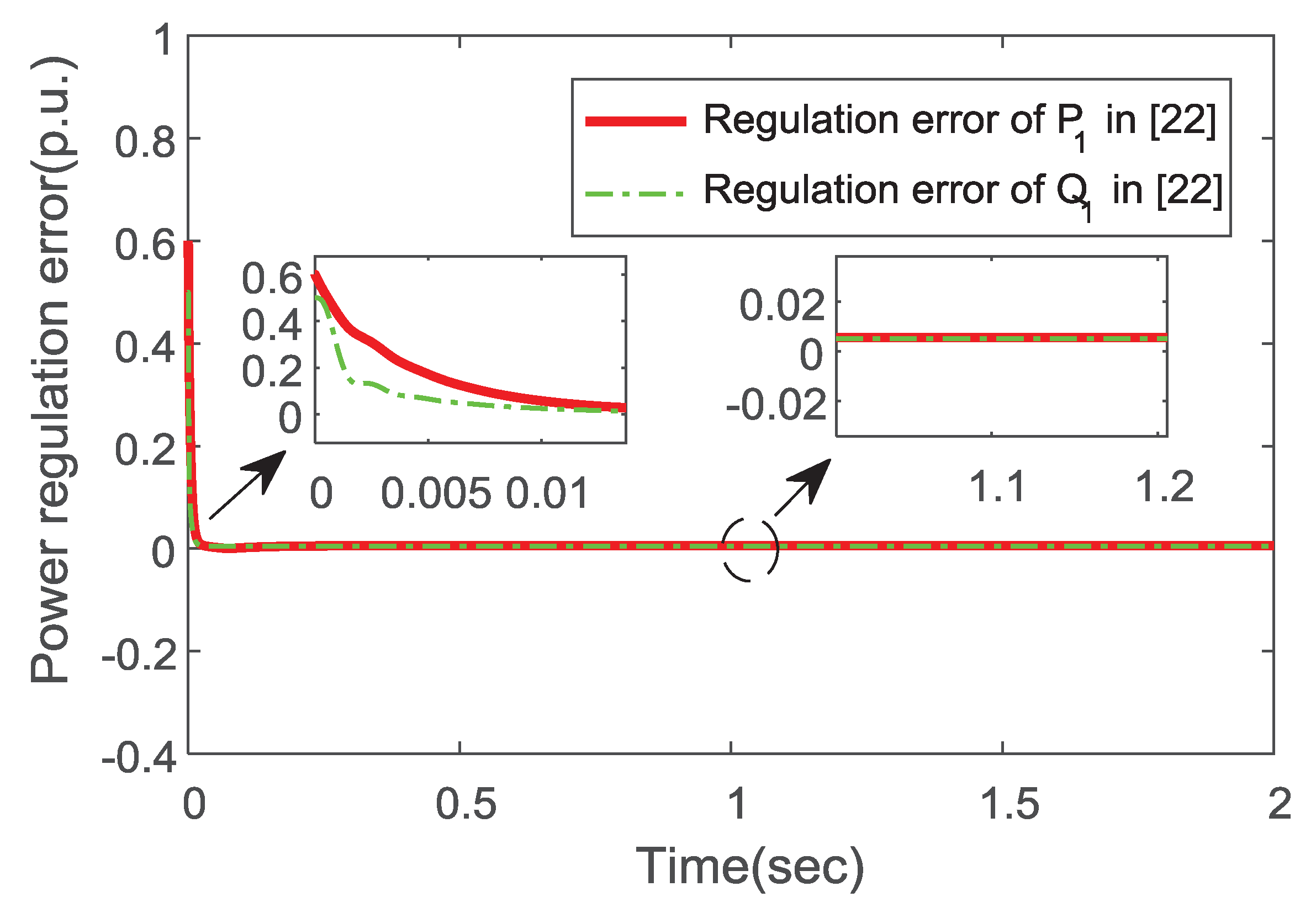
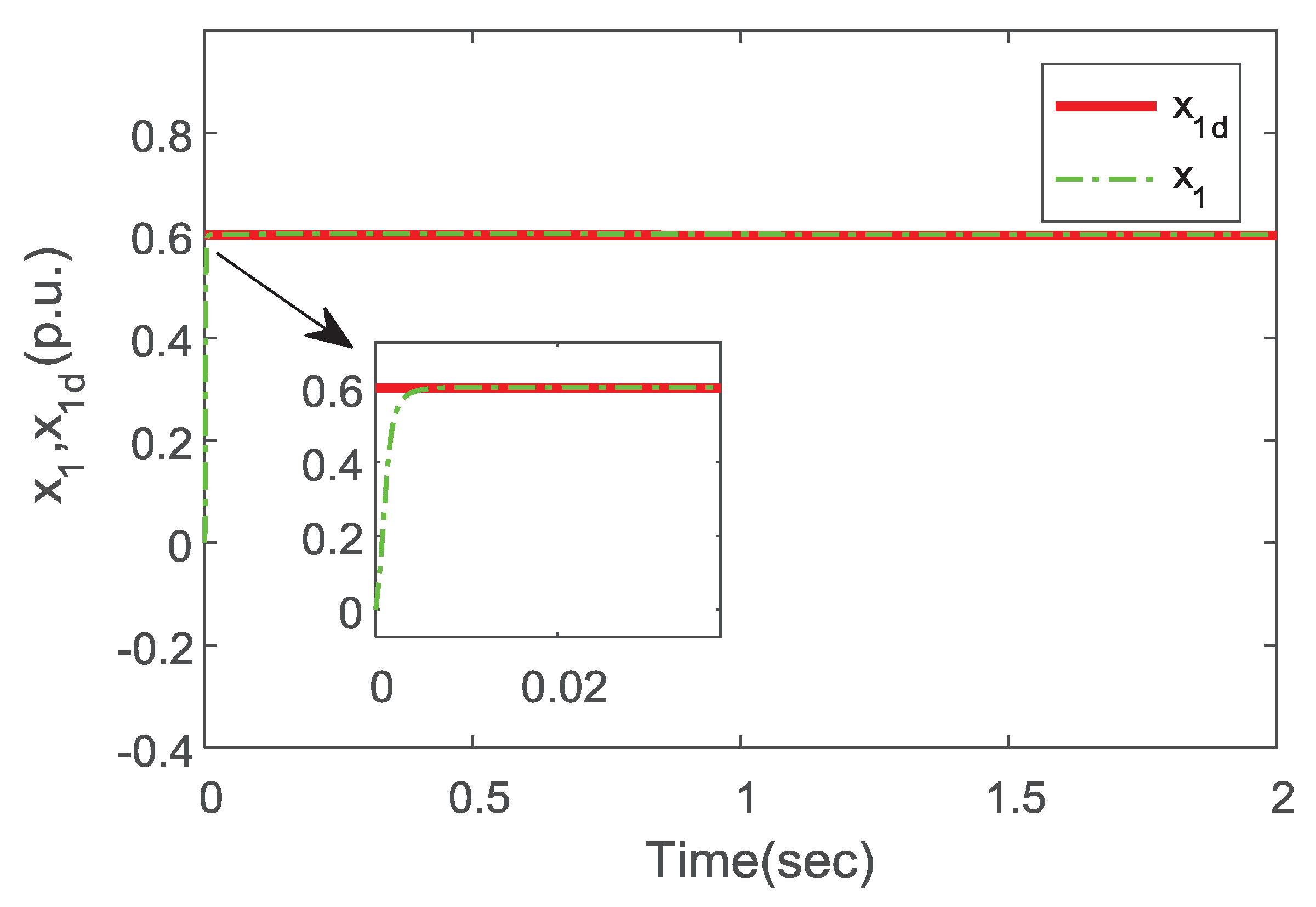
4. Simulation Analysis
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
Appendix A. Stability Proof
References
- Erlich, I.; Shewarega, F.; Feltes, C.; Koch, F.W.; Fortmann, J. Offshore wind power generation technologies. Proc. IEEE 2013, 101, 891–905. [Google Scholar] [CrossRef]
- Vos, K.D.; Driesen, J.; Belmans, R. Assessment of imbalance settlement exemptions for offshore wind power generation in belgium. Energy Policy 2011, 39, 1486–1494. [Google Scholar] [CrossRef]
- Panapakidis, I.P.; Michailides, C.; Angelides, D.C. Implementation of Pattern Recognition Algorithms in Processing Incomplete Wind Speed Data for Energy Assessment of Offshore Wind Turbines. Electronics 2019, 8, 418. [Google Scholar] [CrossRef] [Green Version]
- Salic, T.; Charpentier, J.F.; Benbouzid, M.; Le Boulluec, M. Control Strategies for Floating Offshore Wind Turbine: Challenges and Trends. Electronics 2019, 8, 1185. [Google Scholar] [CrossRef] [Green Version]
- Jo, S.R.; Kim, S.M.; Cho, S.; Lee, K.B. Development of a Hardware Simulator for Reliable Design of Modular Multilevel Converters Based on Junction-Temperature of IGBT Modules. Electronics 2019, 8, 1127. [Google Scholar] [CrossRef] [Green Version]
- Noeding, C.; Felgemacher, C.; Dombert, B.; Zacharias, P. Advantages of IGBT Series Connection in 1.500 V PVinverters. In Proceedings of the International Exhibition and Conference for Power Electronics, Nuremberg, Germany, 19–20 May 2015; VDE: Nuremberg, Germany, 2015; pp. 627–634. [Google Scholar]
- Donlon, J.F.; Motto, E.R.; Ishii, K.; Iida, T. Application advantages of high voltage high current IGBTs with punch through technology. In Proceedings of the Conference Record of the 1997 IEEE Industry Applications Conference Thirty-Second IAS Annual Meeting (IAS ’97), New Orleans, LA, USA, 5–9 October 1997; pp. 955–960. [Google Scholar]
- Li, H.; Xiang, D.W.; Yang, X.W.; Zhang, X.Y. Compressed Sensing Method for IGBT High-Speed Switching Time On-Line Monitoring. IEEE Trans. Ind. Electron. 2018, 66, 3185–3195. [Google Scholar] [CrossRef]
- Ortiz, G.; Uemura, H.; Bortis, D.; Kolar, J.W.; Apeldoorn, O. Modeling of soft-switching losses of IGBTs in high-power high-efficiency dual-active-bridge dc/dc converters. IEEE Trans. Electron Devices 2013, 60, 587–597. [Google Scholar] [CrossRef]
- Rouzbehi, K.; Yazdi, S.S.H.; Moghadam, N.S. Power Flow Control in Multi-Terminal HVDC Grids Using a Serial-Parallel DC Power Flow Controller. IEEE Access 2018, 6, 56934–56944. [Google Scholar] [CrossRef]
- Raza, A.; Akhtar, A.; Jamil, M.; Abbas, G.; Gilani, S.O.; Liu, Y.C.; Khan, M.N.; Izhar, T.; Xu, D.G.; Williams, B.W. A Protection Scheme for Multi-Terminal VSC-HVDC Transmission Systems. IEEE Access 2018, 6, 3159–3166. [Google Scholar] [CrossRef]
- Chen, H.F.; Wakeman, F.; Pitman, J.; Li, G.R. Design, analysis, and testing of PP-IGBT-based submodule stack for the MMC VSC HVDC with 3000A DC bus current. J. Eng. 2019, 16, 917–923. [Google Scholar]
- Zhang, G.B.; Xu, Z. Steady-state model for VSC based HVDC and its controller design. In Proceedings of the 2001 IEEE Power Engineering Society Winter Meeting, Columbus, OH, USA, 28 January–1 February 2001; pp. 1085–1090. [Google Scholar]
- Tong, S.C.; Li, H.X. Fuzzy adaptive sliding-mode control for mimo nonlinear systems. IEEE Trans Fuzzy Syst. 2003, 11, 354–360. [Google Scholar] [CrossRef]
- Yu, X.H.; Man, Z.H. Nonsingular fast terminal sliding-mode control for nonlinear dynamical systems. Fundam. Theory Appl. 2002, 49, 261–264. [Google Scholar]
- Huang, Y.J.; Kuo, T.C.; Chang, S.H. Adaptive sliding-mode control for nonlinearsystems with uncertain parameters. IEEE Trans. Cybern. 2008, 38, 534–539. [Google Scholar] [CrossRef] [PubMed]
- Sira-Ramirez, H. On the sliding mode control of multivariable nonlinear systems. Int. J. Control 1996, 64, 745–765. [Google Scholar] [CrossRef]
- Liu, Y.J.; Tong, S.C. Barrier lyapunov functions for nussbaum gain adaptive control of full state constrained nonlinear systems. Automatica 2017, 76, 143–152. [Google Scholar] [CrossRef]
- Ruan, S.Y.; Li, G.J.; Jiao, X.H.; Sun, Y.Z.; Lie, T.T. Adaptive control design for VSC-HVDC systems based on backstepping method. Electr. Power Syst. Res. 2007, 77, 559–565. [Google Scholar] [CrossRef]
- Jeong, W.; Jeon, S.; Jeong, D. Advanced Backstepping Trajectory Control for Skid-Steered Duct-Cleaning Mobile Platforms. Electronics 2019, 8, 401. [Google Scholar] [CrossRef] [Green Version]
- Yu, J.P.; Shi, P.; Zhao, L. Finite-time command filtered backstepping control for a class of nonlinear systems. Automatica 2018, 92, 173–180. [Google Scholar] [CrossRef]
- Wu, J.; Wang, Z.X.; Wang, G.Q.; Lu, X.F.; Zou, J.L. Backstepping control for voltage source converter-high voltage direct current grid side converter. Control Theory Appl. 2013, 30, 1408–1413. [Google Scholar]
- Zhang, T.; Ge, S.S.; Hang, C.C. Adaptive neural network control for strict-feedback nonlinear systems using backstepping design. Automatica 1999, 36, 1835–1846. [Google Scholar] [CrossRef]
- Wang, Y.Z.; Wendy, W.J.; Wang, C.S.; Liu, H.T.; Zhan, X.; Xiao, X.L. Adaptive Voltage Droop Method of Multiterminal VSC-HVDC Systems for DC Voltage Deviation and Power Sharing. IEEE Trans. Power Deliv. 2019, 34, 169–176. [Google Scholar]
- Yu, J.P.; Shi, P.; Dong, W.J.; Chen, B.; Lin, C. Neural network-based adaptive dynamic surface control for permanent magnet synchronous motors. IEEE Trans. Neural Netw. Learn. Syst. 2015, 26, 640–645. [Google Scholar] [CrossRef] [PubMed]
- Swaroop, D.; Hedrick, J.K.; Yip, P.P.; Gerdes, J.C. Dynamic surface control for a class of nonlinear systems. IEEE Trans. Autom. Control. 2000, 45, 1893–1899. [Google Scholar] [CrossRef] [Green Version]
- Li, B.T.; Liu, Y.H.; Li, B.; Xue, Y. Research on the Coordinated Control of the True Bipolar VSC-HVdc Grid Based on Operating Point Optimization. IEEE Trans. Ind. Electron. 2019, 66, 6692–6702. [Google Scholar] [CrossRef]
- Gul, M.; Tai, N.L.; Huang, W.T.; Nadeem, M.H.; Ahmad, M.; Yu, M.D. Technical and Economic Assessment of VSC-HVDC Transmission Model: A Case Study of South-Western Region in Pakistan. Electronics 2019, 8, 1305. [Google Scholar] [CrossRef] [Green Version]
- Xu, L.; Andersen, B.R.; Cartwright, P. Vsc transmission operating under unbalanced ac conditions analysis and control design. IEEE Trans. Power Deliv. 2005, 20, 427–434. [Google Scholar] [CrossRef]
- Pradhan, J.K.; Ghosh, A.; Bhende, C.N. Small-signal modeling and multivariable PI control design of VSC-HVDC transmission link. Electr. Power Syst. Res. 2017, 144, 115–126. [Google Scholar] [CrossRef]
- Geng, Y.C.; Li, Z.X.; Zhang, J.C. Study on a hybrid fuzzy-PI controller applied to VSC-HVDC system. In Proceedings of the 2010 2nd International Asia Conference, Wuhan, China, 6–7 March 2010; pp. 484–487. [Google Scholar]
- Dai, Y.X.; Wang, H.; Zeng, G.Q. Double closed-loop pi control of three-phase inverters by binary-coded extremal optimization. IEEE Access 2016, 4, 7621–7632. [Google Scholar] [CrossRef]
- Liang, H.F.; Li, G.Y.; Li, G.K.; Li, P.; Yin, M. Analysis and design of H∞ controller in VSC HVDC systems. In Proceedings of the 2005 IEEE/PES Transmission and Distribution Conference & Exhibition, Dalian, China, 15–18 August 2005; pp. 1–6. [Google Scholar]
- Ramadan, H.S.; Siguerdidjane, H.; Petit, M. Robust nonlinear control strategy for HVDC light transmission systems. In Proceedings of the 2008 Annual Conference of IEEE Industrial Electronics, Orlando, FL, USA, 10–13 November 2008; pp. 360–365. [Google Scholar]
- Koutiva, X.I.; Vrionis, T.D.; Vovos, N.A.; Giannakopoulos, G.B. Optimal integration of an offshore wind farm to a weak AC grid. IEEE Trans. Power Deliv. 2006, 21, 987–994. [Google Scholar] [CrossRef]
- Vrionis, T.D.; Koutiva, X.I.; Vovos, N.A.; Giannakopoulos, G.B. Control of an HVDC link connecting a wind farm to the grid for fault ride-through enhancement. IEEE Trans. Power Syst. 2007, 22, 2039–2047. [Google Scholar] [CrossRef]
- Ersdal, A.M.; Imsland, L.; Uhlen, K. Coordinated Control of Multiple HVDC links using backstepping. In Proceedings of the 2012 IEEE International Conference on Control Applications, Dubrovnik, Croatia, 3–5 October 2012; pp. 1118–1123. [Google Scholar]
- Xu, L.; Yao, L.Z.; Sasse, C. Grid Integration of Large DFIG-Based Wind Farms Using VSC Transmission. IEEE Trans. Power Syst. 2007, 22, 976–984. [Google Scholar] [CrossRef]
- Liserre, M.; Blaabjerg, F.; Hansen, S. Design and control of an LCL-filter based three-phase active rectifier. IEEE Trans. Ind. Appl. 2005, 41, 1281–1291. [Google Scholar] [CrossRef]
- Malinowski, M.; Szczygiel, W.; Kazmierkowski, M.P. Sensorless operation of active damping methods for three-phase PWM converters. In Proceedings of the 2005 IEEE International Symposium on Industrial Electronics, Dubrovnik, Croatia, 20–23 June 2005; pp. 775–780. [Google Scholar]
- Zhou, X.H.; Fan, J.W.; Huang, A.Q. High-frequency resonance mitigation for plug-in hybrid electric vehicles’ integration with a wide range of grid conditions. IEEE Trans. Power Electron. 2012, 27, 4459–4471. [Google Scholar] [CrossRef]
- Malinowski, M.; Kazmierkowski, M.P.; Bernet, S. New simple active damping of resonance in three-phase PWM converter with LCL filter. In Proceedings of the 2005 IEEE International Conference on Industrial Technology, Hong Kong, China, 14–17 December 2005; pp. 861–865. [Google Scholar]
- Xie, C.; Wang, Y.; Zhong, X.; Chen, C. A novel active damping method for LCL-filter-based shunt active power filter. In Proceedings of the 2012 IEEE International Symposium on Industrial Electronics, Hangzhou, China, 28–31 May 2012; pp. 64–69. [Google Scholar]
- Wu, D.; Chen, Y.H.; Hong, H.H.; Zhao, X.D.; Luo, J.; Gu, Z.G. Mathematical model analysis and LCL Filter Design of VSC. In Proceedings of the 2012 IEEE 7th International Power Electronics and Motion Control Conference, Harbin, China, 2–5 June 2012; pp. 2700–2804. [Google Scholar]
- Wu, J.; Wang, Z.X.; Jiang, C.H.; Wang, G.Q. Small-capacity experimental prototype of vsc-hvdc for offshore wind farm. Adv. Mater. Res. 2012, 608–609, 601–606. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Systems Parameter | Value | Controller Parameter | Value |
|---|---|---|---|
| 8850 | |||
| 3600 | |||
| 555 | |||
| 7100 | |||
| 59,000 | |||
| E | 80,000 | ||
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hu, C.; Ma, Y.; Yu, J.; Zhao, L. Dynamic Surface Backstepping Control for Voltage Source Converter-High Voltage Direct Current Transmission Grid Side Converter Systems. Electronics 2020, 9, 333. https://doi.org/10.3390/electronics9020333
Hu C, Ma Y, Yu J, Zhao L. Dynamic Surface Backstepping Control for Voltage Source Converter-High Voltage Direct Current Transmission Grid Side Converter Systems. Electronics. 2020; 9(2):333. https://doi.org/10.3390/electronics9020333
Chicago/Turabian StyleHu, Chengjiang, Yumei Ma, Jinpeng Yu, and Lin Zhao. 2020. "Dynamic Surface Backstepping Control for Voltage Source Converter-High Voltage Direct Current Transmission Grid Side Converter Systems" Electronics 9, no. 2: 333. https://doi.org/10.3390/electronics9020333
APA StyleHu, C., Ma, Y., Yu, J., & Zhao, L. (2020). Dynamic Surface Backstepping Control for Voltage Source Converter-High Voltage Direct Current Transmission Grid Side Converter Systems. Electronics, 9(2), 333. https://doi.org/10.3390/electronics9020333