Multi-Objective Optimization of Task-to-Node Assignment in Opportunistic Fog RAN




Abstract
:1. Introduction
2. Related Works
3. System Modeling and Problem Formulation
3.1. System Modelling
3.2. Problem Formulation
4. MOEA/D Framework for Solving the TNA Problem
4.1. Decomposition
4.2. MOEA/D Framework
| Algorithm 1 MOEA/D framework for the TNA problem |
| 1: Input: |
| 2: TNA parameters (, ,); |
| 3: : population size and number of sub-problems; |
| 4: : neighborhood size; |
| 5: set of weight vectors for the sub-problems; |
| 6: : maximum number of generations (beyond which no further addition of non-dominated solutions to the is normally observed) |
| 7: Output: |
| 8: Step 1) Initialization |
| 9: Set =; ; ; |
| 10: Generate an initial randomly subject to the constraints in Equations (5) and (6); |
| 11: Determine the closest neighborhood for each of sub-problems; |
| 12: Step 2) Reproduction and update |
| 13: for do |
| 14: Randomly select two closest neighbor solutions and generate a new solution using the genetic operators |
| 15: Use to update , closest neighbor solutions, and |
| 16: end |
| 17: Step 3) Stopping criterion |
| 18: if then |
| 19: Stop and output ; |
| 20: else |
| 21: Increment and go to Step 2) |
| 22: end |
4.2.1. Chromosome encoding
4.2.2. Crossover Operator
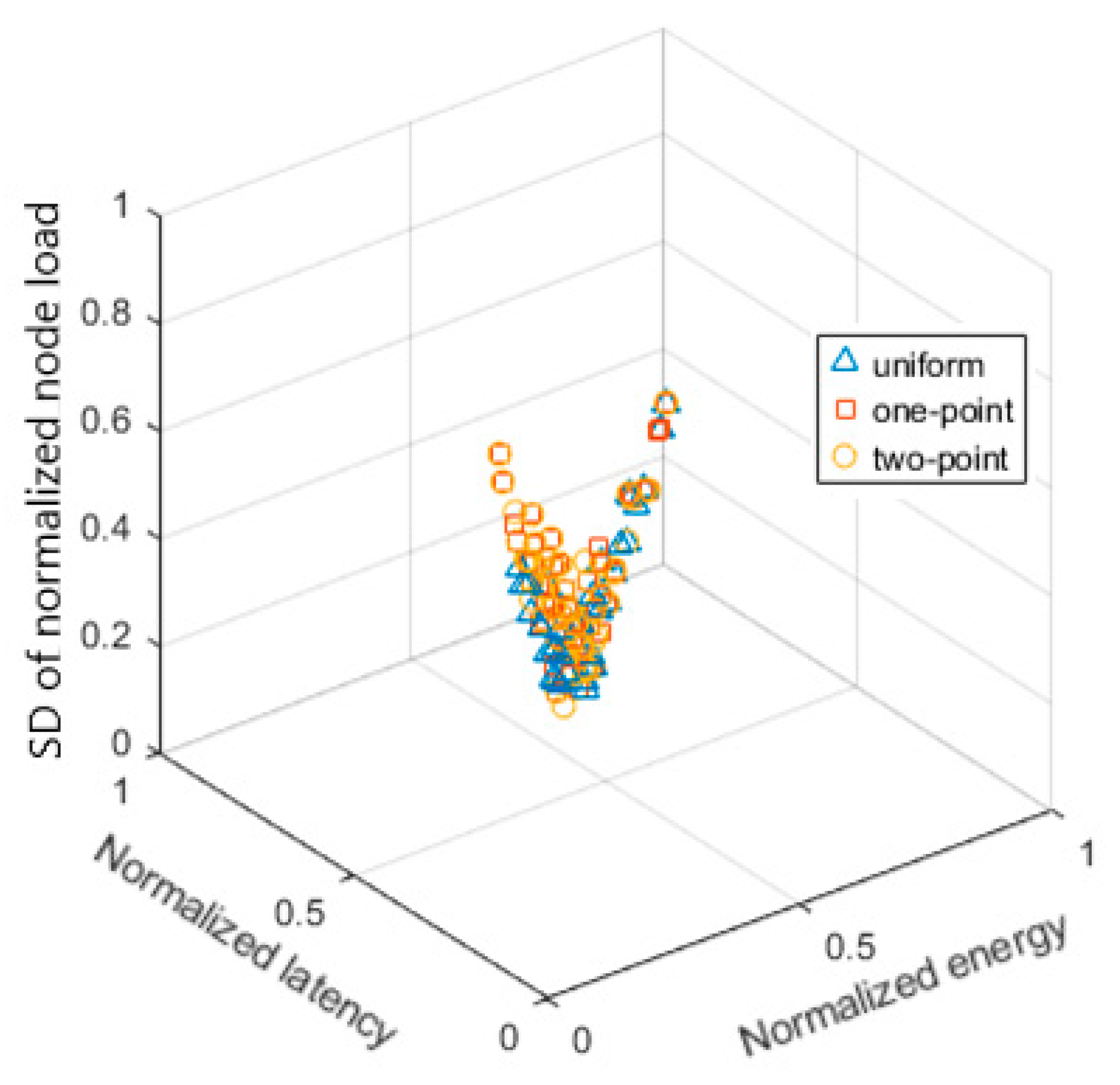
- One-point crossover: Two parent chromosomes ( of length M are selected, and a random crossover point is chosen between 1 and . Each chromosome is then sliced into two segments which are exchanged to produce offspring, from which an offspring is randomly selected.
- Two-point crossover: The process is similar to one-point crossover, except two instead of one random crossover points are chosen for segmenting the chromosomes.
- Uniform crossover: Unlike the above, offspring here are produced from an exchange of genes uniformly selected from two parent chromosomes: from odd-index locus of and even-index locus of , and vice-versa; from which an offspring is randomly selected.
5. Simulation Environment
6. Results and Discussion
7. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- D’Oro, S.; Marotta, M.A.; Both, C.B.; da Silva, L.; Palazzo, S. Power efficient resource allocation in C-RANs with SINR constraints and deadlines. IEEE Trans. Veh. Technol. 2019, 68, 6099–6113. [Google Scholar] [CrossRef] [Green Version]
- Tang, J.; Quek, T.Q.S.; Chang, T.-H.; Shim, B. Systematic resource allocation in cloud RAN with caching as a service under two timescales. IEEE Trans. Commun. 2019, 67, 7755–7770. [Google Scholar] [CrossRef]
- Puliafito, C.; Mingozzi, E.; Longo, F.; Puliafito, A.; Rana, O. Fog computing for the Internet of Things: A survey. ACM Trans. Internet Technol. 2019, 19, 18. [Google Scholar] [CrossRef]
- Tran, M.-Q.; Nguyen, D.T.; Le, V.A.; Nguyen, D.H.; Pham, T.V. Task placement on fog computing made efficient for IoT application provision. Wirel. Commun. Mob. Comput. 2019, 2019, 1–17. [Google Scholar] [CrossRef] [Green Version]
- Li, J.; Shen, X.; Chen, L.; Van, D.P.; Ou, J.; Wosinska, L.; Chen, J. Service Migration in Fog Computing Enabled Cellular Networks to Support Real-time Vehicular Communications. IEEE Access 2019, 7, 13074–13714. [Google Scholar] [CrossRef]
- Peng, M.; Yan, S.; Zhang, K.; Wang, C. Fog computing-based radio access networks: Issues and challenges. IEEE Netw. Mag. 2016, 30, 46–53. [Google Scholar] [CrossRef] [Green Version]
- Zhang, Q.; Gui, L.; Hou, F.; Chen, J.; Zhu, S. Dynamic task offloading and resource allocation in mobile edge computing in dense Cloud RAN. IEEE Internet Things J. 2020, 1-1. [Google Scholar] [CrossRef]
- Jijin, J.; Seet, B.-C. Opportunistic fog computing for 5G radio access networks: A position paper. In Smart Grid and Innovative Frontiers in Telecommunications (SmartGIFT). LNICST; Chong, P., Seet, B.-C., Chai, M., Rehman, S., Eds.; Springer: Cham, Switzerland, 2018; Volume 245, pp. 82–92. [Google Scholar]
- Lilien, L.; Gupta, A.; Kamal, Z.; Yang, Z. Opportunistic resource utilization networks—A new paradigm for specialized ad hoc networks. Comput. Elect. Eng. 2010, 36, 328–340. [Google Scholar] [CrossRef]
- Jijin, J.; Seet, B.-C.; Chong, P.H.J.; Jarrah, H. Service load balancing in fog-based 5G radio access networks. In Proceedings of the IEEE International Symposium on Personal, Indoor and Mobile Radio Communications (PIMRC), Montreal, QC, Canada, 8–13 October 2017. [Google Scholar]
- Konstantinidis, A.; Yang, K.; Zhang, Q.; Zeinalipour-Yazti, D. A multi-objective evolutionary algorithm for the deployment and power assignment problem in wireless sensor networks. Comput. Netw. 2010, 54, 960–976. [Google Scholar] [CrossRef]
- Liu, L.; Chang, Z.; Guo, X.; Mao, S.; Ristaniemi, T. Multiobjective optimization for computation offloading in fog computing. IEEE Internet Things J. 2018, 5, 283–294. [Google Scholar] [CrossRef]
- Cui, L.; Xu, C.; Yang, S.; Huang, J.Z.; Li, J.; Wang, X.; Ming, Z.; Lu, N. Joint optimization of energy consumption and latency in mobile edge computing for Internet of Things. IEEE Internet Things J. 2018, 6, 4791–4803. [Google Scholar] [CrossRef]
- Dinh, T.Q.; Tang, J.; La, Q.D.; Quek, T.Q.S. Offloading in mobile edge computing: Task allocation and computational frequency scaling. IEEE Trans. Commun. 2017, 65, 3571–3584. [Google Scholar]
- Li, X.; Zhou, D.; Pan, Q.; Tang, Y.; Huang, J. Weapon-target assignment problem by multi-objective evolutionary algorithm based on decomposition. Complexity 2018, 2018, 1–19. [Google Scholar]
- Peng, W.; Zhang, Q.; Li, H. Comparison between MOEA/D and NSGA-II on the multi-objective travelling salesman problem. In Multi-Objective Memetic Algorithms; Goh, C.-K., Ong, Y.-S., Tan, K.C., Eds.; Studies in Computational Intelligence; Springer: Berlin/Heidelberg, Germany, 2009; volume 171, pp. 309–324. [Google Scholar]
- Guerrero, C.; Lera, I.; Juiz, C. Evaluation and efficiency comparison of evolutionary algorithms for service placement optimization in fog architectures. Future Gener. Comput. Syst. 2019, 97, 131–144. [Google Scholar] [CrossRef]
- Cover, T.; Thomas, J. Elements of Information Theory, 2nd ed.; John Wiley and Sons: Hoboken, NJ, USA, 2006. [Google Scholar]
- Fei, Z.; Li, B.; Yang, S.; Xing, C.; Chen, H.; Hanzo, L. A survey of multi-objective optimization in wireless sensor networks: Metrics, algorithms, and open problems. IEEE Commun. Surv. Tutor. 2016, 19, 550–586. [Google Scholar] [CrossRef] [Green Version]
- Yang, X.S. Nature-Inspired Metaheuristic Algorithms; Luniver Press: Bristol, UK, 2010. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Number of service nodes () | 2, 4, 6 (default = 4) |
| Number of service tasks () | 4, 8,12 (default = 8) |
| Crossover Operator | One-point, two-point and uniform crossover |
| Population Size | |
| Neighborhood Size | 25 |
| Normalized Energy | Normalized Latency | S.D. of Normalized Node Load | ||||
|---|---|---|---|---|---|---|
| Mean | Max | Mean | Max | Mean | Max | |
| 2 | 0.8329 | 0.9377 | 0.8627 | 0.9746 | 0.3690 | 0.7322 |
| 4 | 0.8145 | 1.00 | 0.8348 | 1.000 | 0.3257 | 0.6167 |
| 6 | 0.7562 | 1.00 | 0.8059 | 0.9004 | 0.2244 | 0.5036 |
| Normalized Energy | Normalized Latency | S.D. of Normalized Node Load | ||||
|---|---|---|---|---|---|---|
| Mean | Max | Mean | Max | Mean | Max | |
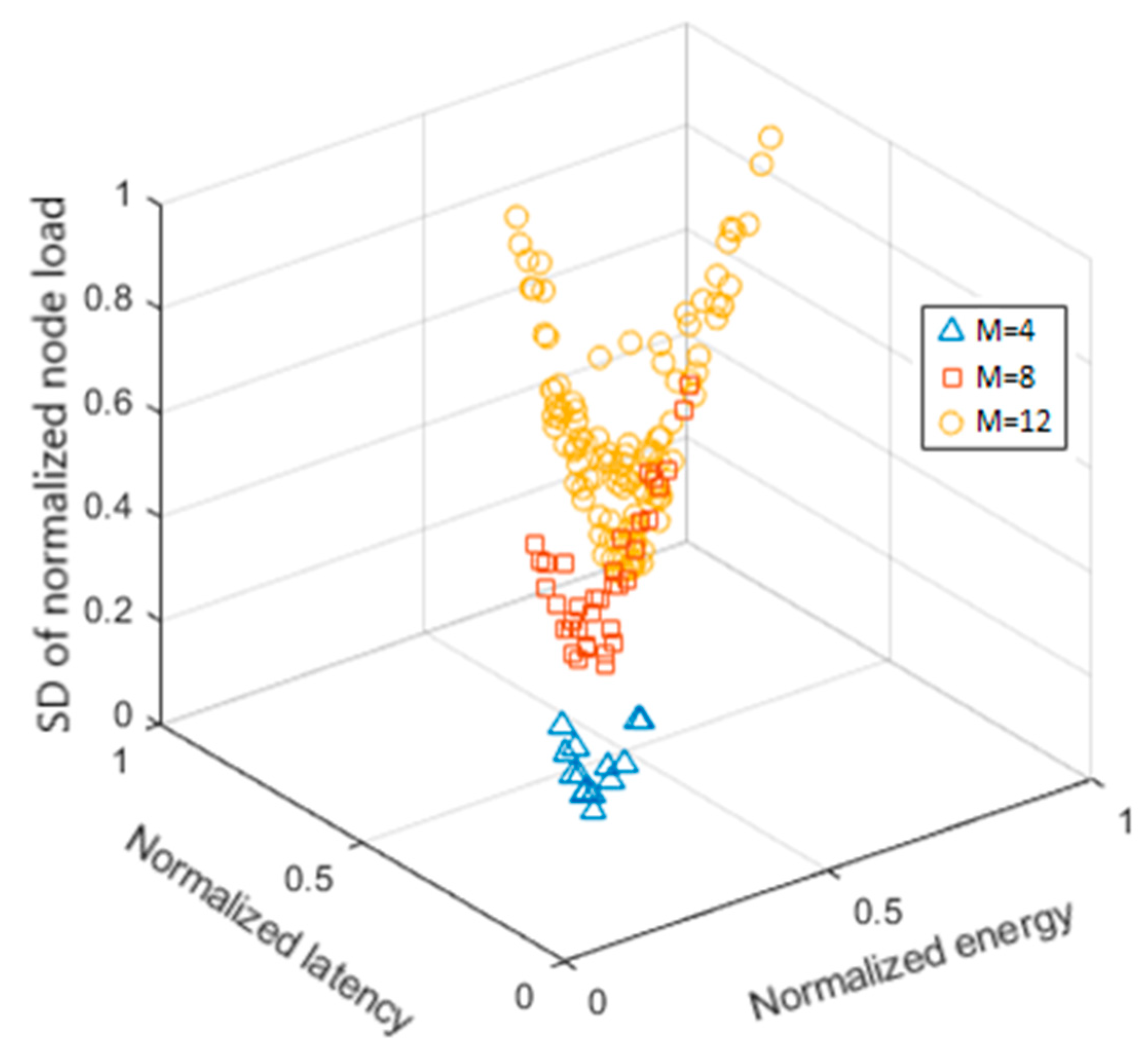
| 4 | 0.2617 | 0.3339 | 0.2650 | 0.2790 | 0.1640 | 0.2539 |
| 8 | 0.5489 | 0.6778 | 0.6242 | 0.6684 | 0.2760 | 0.6087 |
| 12 | 0.7872 | 1.00 | 0.8713 | 0.9253 | 0.3550 | 0.8722 |
| C-Metric | (%) |
|---|---|
| C (Uniform, One-point) | 100 |
| C (One-point, Uniform) | 81.81 |
| C (Uniform, Two-point) | 100 |
| C (Two-point, Uniform) | 81.81 |
| C (One-point, Two-point) | 98.44 |
| C (Two-point, One-point) | 98.27 |
| C-Metric | (%) |
|---|---|
| C (MOEA/D, NSGA-II) | 100 |
| C (NSGA-II, MOEA/D) | 96.30 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jijin, J.; Seet, B.-C.; Chong, P.H.J. Multi-Objective Optimization of Task-to-Node Assignment in Opportunistic Fog RAN. Electronics 2020, 9, 474. https://doi.org/10.3390/electronics9030474
Jijin J, Seet B-C, Chong PHJ. Multi-Objective Optimization of Task-to-Node Assignment in Opportunistic Fog RAN. Electronics. 2020; 9(3):474. https://doi.org/10.3390/electronics9030474
Chicago/Turabian StyleJijin, Jofina, Boon-Chong Seet, and Peter Han Joo Chong. 2020. "Multi-Objective Optimization of Task-to-Node Assignment in Opportunistic Fog RAN" Electronics 9, no. 3: 474. https://doi.org/10.3390/electronics9030474
APA StyleJijin, J., Seet, B. -C., & Chong, P. H. J. (2020). Multi-Objective Optimization of Task-to-Node Assignment in Opportunistic Fog RAN. Electronics, 9(3), 474. https://doi.org/10.3390/electronics9030474