2. Algorithm for Finding Regular Fundamental Tilings in the Plane
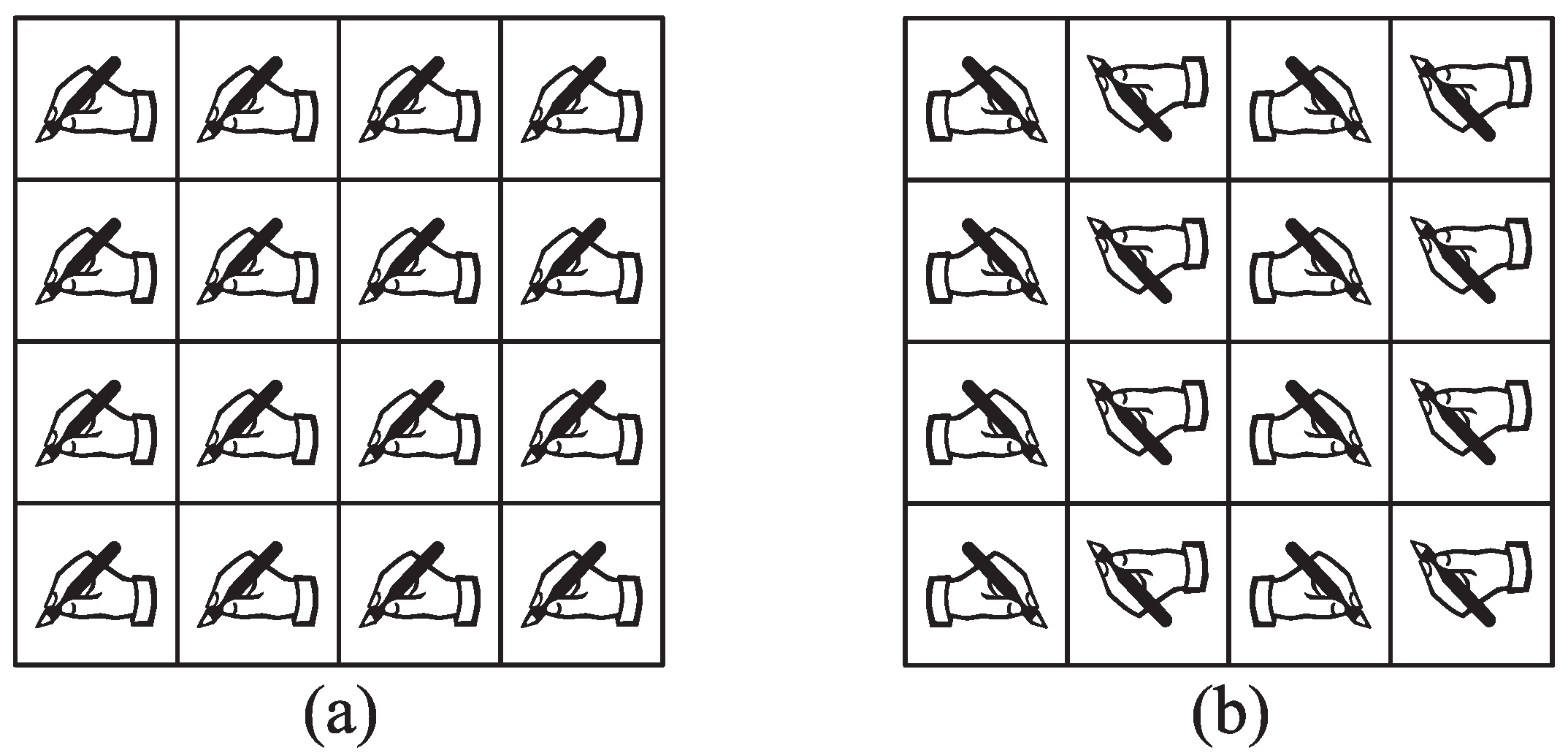
We can develop a combinatorial algorithm for finding the symmetry groups of a regular tiling. We consider henceforward the Euclidean square tiling
and take a square from it. First of all, we look for the essentially different pairings of its edges. In a pairing an edge is paired with another one or with itself. Two pairings are said to be equivariant (essentially non-different) if there exists a symmetry of the square that maps the first pairing onto the second one. In
Figure 4 the first column symbolically shows the five possibilities: each edge is paired with itself, two opposite edges form a pair and the other two ones are paired with themselves, and so on.
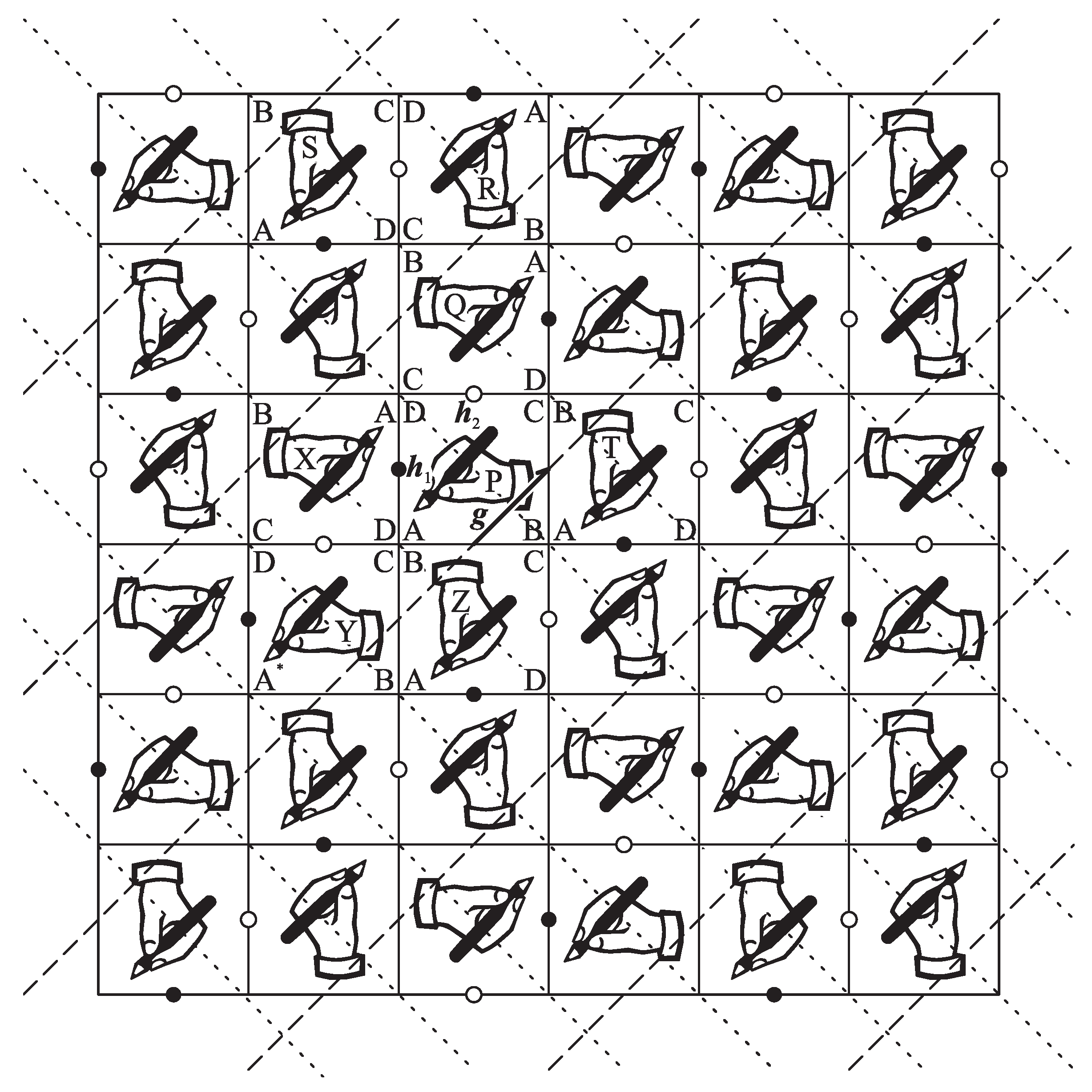
Then, in the second step we identify the paired edges forming edge identifications from the pairings and list the non-equivariant ones. If an edge is paired with itself then it can be identified by a half turn around its midpoint transposing its half edges or by reflection in the straight line of the edge fixing its each point. Moreover, if two opposite edges form the pair then they can be identified by a translation or by a glide reflection and its inverse whose common glide axis joins the midpoints of edges and the translation part is also determined by these two points. Finally, if two neighbouring edges form the pair then they can be identified by a quarter turn and its inverse around the common vertex or by a glide reflection and its inverse similarly to the previous case (as we have seen also in our introductory example).
Then applying the (combinatorial) Poincaré algorithm we examine each edge identification, whether it generates a symmetry group acting simply transitively on the tiling. Namely, we form the cycle transformations and check whether their word lengths are divisor of
. If so, then we can create also the defining relations, and we obtain the symmetry group. This group is a crystallographic group of the Euclidean plane, so it can be found in [
2]. However, if the word length of a cycle transformation is not a divisor of 4, then the given edge identification does not generate an appropriate group.
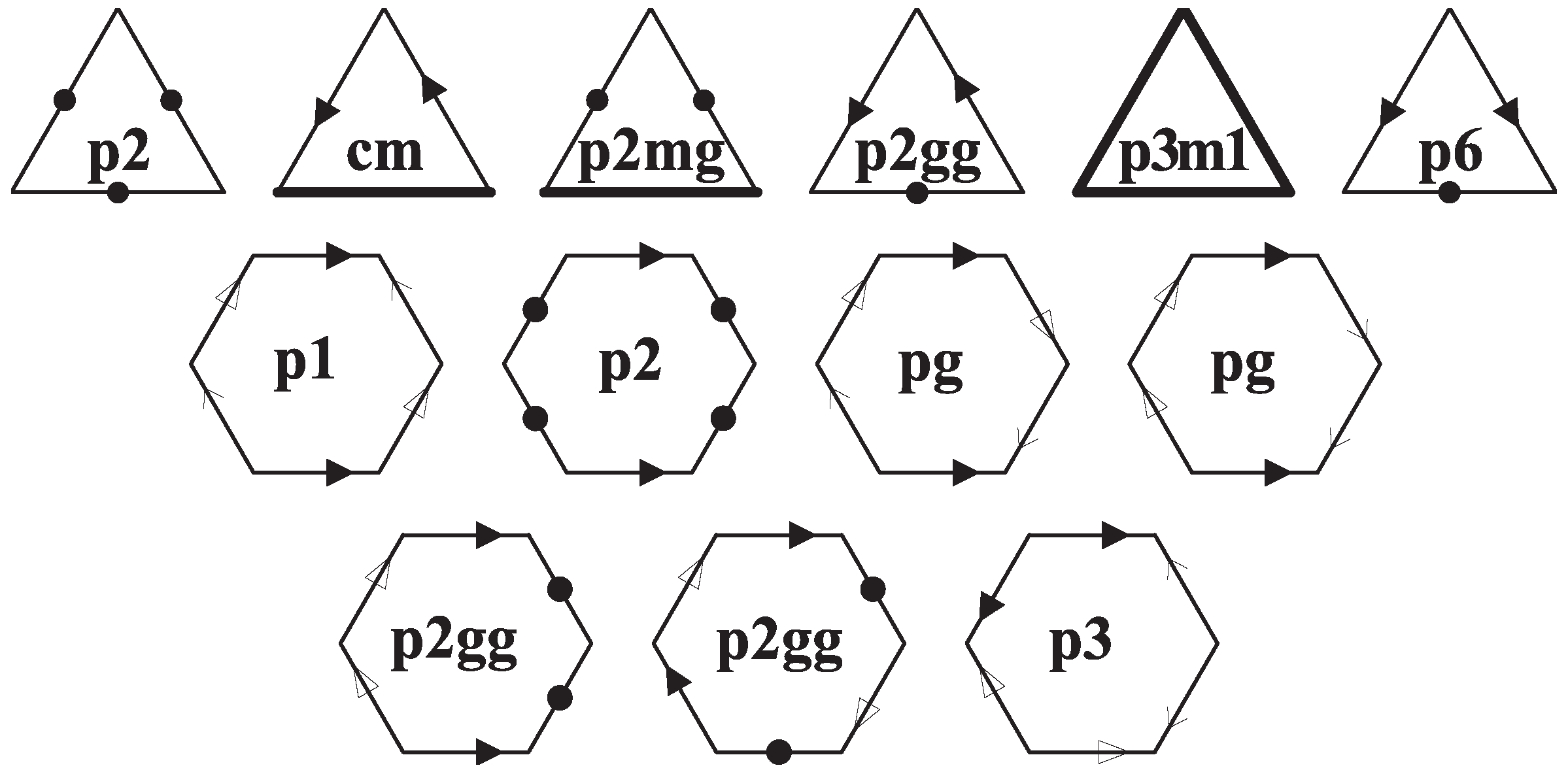
Finally, we can summarize our result in the following theorem. The square has 24 non-equivariant edge identifications.
Among them there are 16 ones determining fundamental tilings of the Euclidean plane. These edge identifications generate 11 non-isomorphic plane crystallographic groups as Figure 4 shows by their names.
It is important to note that the edge identifications which generate fixed point free groups (
or
) lead to 2-dimensional Euclidean manifolds (in the
and
rows of
Figure 4). Deforming the square we glue its sides together as the identified directed edges prescribe. In this way the edge identification, which generates
, determines the torus surface as orientable 2-manifolds, while the other two ones generating
determine the Klein bottle as non-orientable 2-manifolds. The above gluing is logical, i.e., with the Euclidean plane (
) metric.
4. Generalization of the Algorithm for 3-Dimensional Space
The general algorithm works on the incidence structure of a
d-dimensional polyhedron
P (see [
4,
5]). However, it can be shown that the complexity of this algorithm is super exponential on dimensions. The most important results refer to the 3-dimensional polyhedra having not too many faces. Thus in this section we will concentrate on
(see also [
6]).
Then the incidence structure of P can be described by the set of so-called flags where V, E, F are the set of vertices, edges, faces of P, respectively. An ordered 3-tuple belongs to (, , ) if and only if v, e and f join together on the surface of P. If f is a given face of P then denotes the set of its flags whose face component is just f. Similarly, we can also speak about the flags of a given edge or a given vertex.
Two flags and are said to be vertex-adjacent if but and . Similarly, we can also define the edge- and face-adjacency of two flags. We assume that the flag structure of P is strictly connected. This means that each flag has exactly one face-, edge-, and vertex-adjacent flag in , furthermore, if and are two different flags in than there is a finite sequence of flags from to so that each flag in the sequence has the common components of and moreover and are face-, edge- or vertex-adjacent flags (). Of course, if P is a regular polyhedron, then this assumption holds automatically.
We can also speak about the incidence preserving maps of the subsets of . For example the bijective map is an automorphism of P if preserves the vertex-, edge- and face-adjacencies. In a similar way, the bijective map is an automorphism of the face f if preserves the vertex- and edge-adjacencies. Moreover, the bijective map is an isomorphism of a face g onto another face h if preserves the vertex- and edge-adjacencies. In this way we can arrange the faces of P into isomorphism classes.
It is easy to see that the automorphism group of a (combinatorial) n-gon is the dihedral group , moreover a k-gon and an ℓ-gon are isomorphic if and only if . If P is regular, then all of its faces are regular n-gons (, 4, 5), thus the faces form only one isomorphism class. We can also recognize that the automorphism group of a regular polyhedron is isomorphic with its (metric) symmetry group.
We can also define the so called face mappings as bijective maps that preserve the vertex- and edge-adjacencies (but do not preserve necessarily the face-adjacencies). Thus the restriction of a face mapping onto the flags of an arbitrary face is an isomorphism. We can also see that the automorphism group is a subgroup of the face mapping group .
In our 2-dimensional example in
Section 2 first we have looked for the non-equivariant (essentially different) pairings and identifications of edges of the fundamental polygon. Now, considering a 3-dimensional fundamental polyhedron
P, we have to search for different face pairings and face identifications.
A face pairing contains disjoint pairs of faces so that each face occurs in exactly one pair but certain faces can also be paired with itself. During the enumeration of the possible pairings, we have to check whether the actual one is different from all the previous ones. Two pairings are equivariant if there is an automorphism of P that maps the first pairing onto the second one.
Then we equip the pairings with face identifying transformations. This means that we give an isomorphism and its inverse () to each pair , where , or an involutive automorphism () to each pair where a face is paired with itself. We can imagine that in the periodic face-to-face tiling the isomorphism prescribes how the fundamental polyhedron P is mapped (by the corresponding isometry ) onto its neighbour along h mapping g onto h, and how P is mapped (by ) onto its neighbour along g mapping h onto g.
Considering the identifying isomorphisms and their inverses (moreover the identifying involutive automorphisms too) we can also recognize that their union is just an involutive face mapping (, ). In this way the face identifications are just the involutive elements of , moreover two face identifications and are equivariant if and only if there is an automorphism mapping onto , namely .
In
Section 2 we have also seen how the Poincaré algorithm forms the defining relations (more precisely the cycle transformations) to a given system of edge identifying generators. Now the generators are given by a face identification
(
). We choose an edge
and a flag
joining it. Then we consider the face component
of
and write the name
of the corresponding transformation belonging to
(the restriction of
onto the flags of
). The next flag
will be the face-adjacent flag of
. Then we write the name of the second transformation belonging to
, thus we obtain the composition
. We continue this method until in the
step we get back the starting flag
as the face-adjacent flag of
. Then we obtain the cycle transformation
which could be a defining relation with an appropriate exponent
k:
. Starting with an edge not appeared among
,
, ⋯,
, we can find another cycle transformation, and so on until each edge occurs in a cycle.
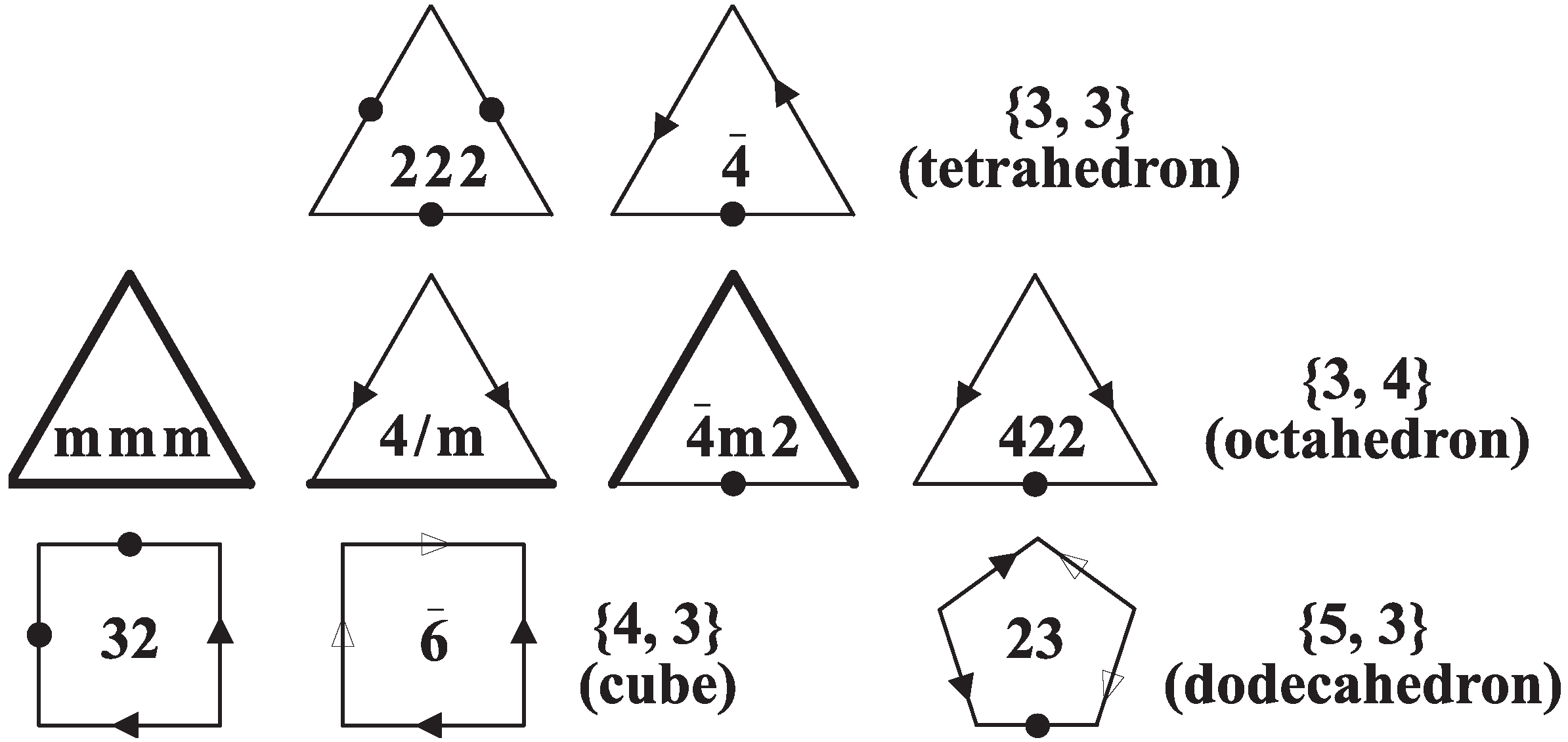
Examining the complexity of the algorithm, it can be established that the most calculations are necessary to enumerate the essentially different face identifications. Deeper examination shows that their number grows exponentially with the number of faces. For example the number of different face identifications of the tetrahedron, the cube and the octahedron are 64, 8260, 92, 340, respectively. Unfortunately these numbers are not known for the dodecahedron and the icosahedron exactly now, but their orders of magnitude are and , respectively.
5. Results in 3-Dimensional Spaces of Constant Curvature
A regular 3-dimensional tiling can be described by its Schläfli symbol which signifies that the tiles are congruent regular polyhedra so that in the tiling there are exactly r tiles around each edge. The vertex figures are also regular polyhedra (or regular horospherical tilings if the vertices are ideal points on the absolute of the hyperbolic space). In the Euclidean space the only regular tiling is the cube tiling . The regular tilings of the spherical space can be derived from the regular 4-dimensional polyhedra projecting them onto the concentric 4-dimensional sphere. In this manner there are 6 (finite) regular spherical tilings: , , with 3-faces (or cells) 5, 16, 600 tetrahedra, respectively, has 24 octahedra as 3-faces, has 8 cubes and has 120 dodecahedra as 3-faces. In the hyperbolic space there are 4 regular tilings with proper (inner) vertices: having icosahedra as 3-tiles, with cubes, , with dodecahedra. Moreover, there are 4 regular tilings with ideal vertices on the absolute: with tetrahedra, with octahedra, with cubes and with dodecahedra.
Related to the problem of square tiling in
Section 1.1 first we consider the cube and look for the pairings of its 6 faces. So we get 10 different possibilities. Adding identifying transformations to them (combinatorially), finally we get 8260 essentially different face identifications. Applying the Poincaré algorithm we can examine which ones generate discrete transformation groups acting simply transitively on tilings
, where
, 4, 5, 6. In case of
we have to choose those identifications where the word lengths of cycle transformations are 1, 2 or 4, thus, with corresponding exponent (4, 2 or 1, respectively) we obtain defining relations of word length 4. Then on the basis of geometric properties of the identifying generators we look up the group in the International Tables [
2]. In this way we get the following result:
the cube has 298 face identifications generating 130 non-isomorphic Euclidean crystallographic groups. Among these identifications there are ones that generate fixed point free (orientable + non-orientable) space groups determining Euclidean 3-manifolds. The complete list of the 298 face identifications and the 130 space groups can be found in [
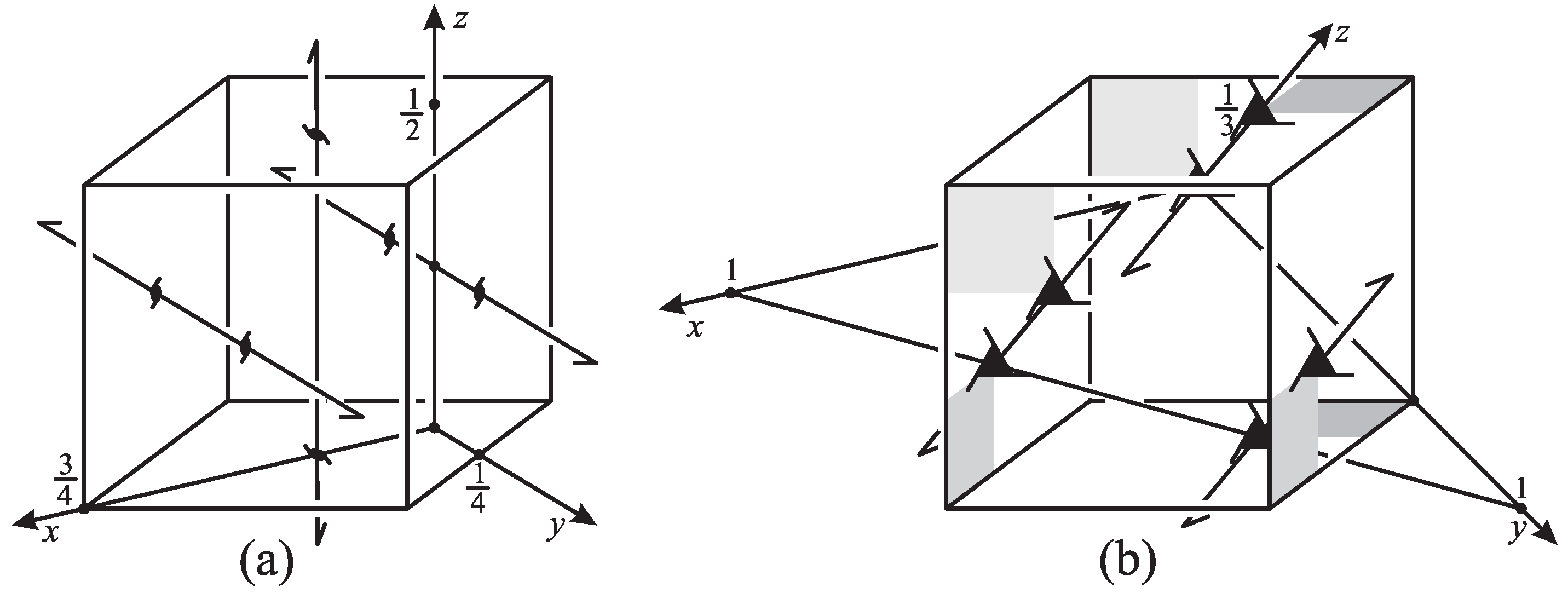
7]. Two of them can be seen in
Figure 7. In the first case screw motions of half turn with parallel and skew axes identify the faces of the cube generating the crystallographic group
(No. 19) while in the second case screw motions of third turn with parallel axes generate the space group
(No. 144). Both of them are fixed point free so they determine orientable Euclidean space forms.
In the cube tiling
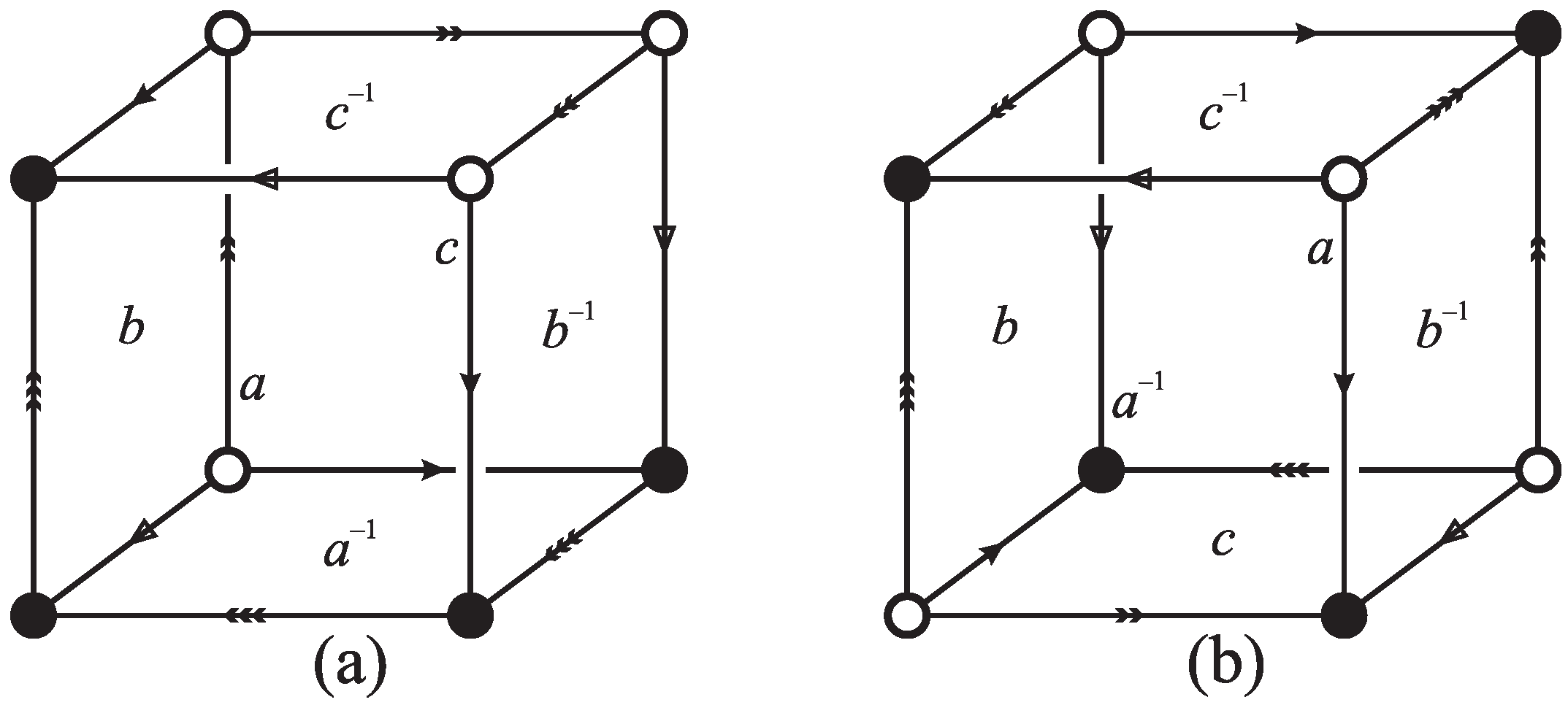
of the spherical space each edge is surrounded by 3 cubes. So we have to look up those face identifications among the 8260 ones, which yield to cycle transformations of word length 1 or 3 by the Poincaré algorithm. Since the tiling contains 8 cubes, we obtain groups of order 8. Finally, we obtain that the cube has 7 face identifications generating 5 non-isomorphic space groups. Two of them are fixed point free yielding orientable spherical space forms. In
Figure 8 we can see the last two ones, where screw motions identify the faces. The generated groups are isomorphic with the cyclic group
and the quaternion group
[
8], respectively.
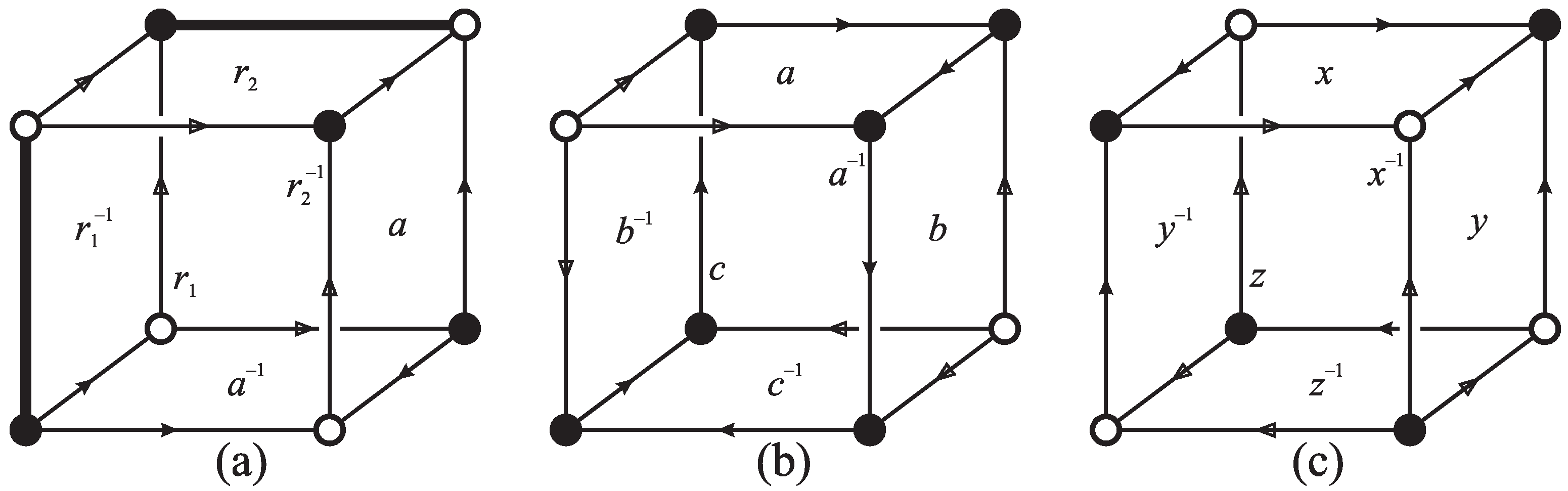
Considering the hyperbolic tiling
we obtain the following surprising result: among the 8260 face identifications of the cube there is only one identification that generates the hyperbolic space group
acting simply transitively on the tiles of
. The identifying generators are two rotations of order 5 and a screw motion, as we can see in
Figure 9a (the first identification) [
9,
10]. Since (for example) the points of rotation axes are fixed, this identification does not determine a space form.
Finally, in the hyperbolic tiling
each edge is surrounded by six cubes, moreover the vertices are ideal points on the absolute (so they not belong to the space). The cube has 203 face identifications generating hyperbolic space groups. Among them there are
ones that generate fixed point free groups determining at least
non-compact (but having finite volume) orientable and non-orientable hyperbolic manifolds [
10,
11,
12]. In
Figure 9 the second and the third face identifications present both cases with an example, respectively.
Usually, in order to decide whether a face identification determines a fixed point free group, we have to examine whether the stabilizer groups of faces, edges and vertices are trivial. For example, each pair of faces must contain different faces, since if a face was paired with itself then the corresponding identifying transformation would fix (at least) one point of this face. (So the number of faces must be even.) Moreover, the number of different edges enumerated by the Poincaré algorithm forming a cycle transformation must be just r (namely the number of tiles around the edges), otherwise (at least) the midpoints of the appeared edges would be fixed. (This also means that r must be a divisor of the number of edges of the polyhedron.) Finally, if the vertices are proper (inner) points of the space, we have to consider the classes of vertices determined by the face identification. Two vertices belong to the same class if there is a sequence of the vertices from the first one to the second one in which an arbitrary vertex is mapped onto the next one by the identification. Then the number of vertices in an arbitrary class must be equal with the number of tiles surrounding the vertices in the given tiling .
However, if the vertices of a hyperbolic tiling are ideal points on the absolute, then the vertex stabilizer subgroups do not have to be trivial. Intersecting the tiling with a horosphere centred at a vertex we obtain a (regular) horospherical polygon tiling. From the neighbouring polygons belonging to different vertices from the given vertex class we can glue the fundamental domain of the vertex stabilizer subgroup. This group and so its restriction to the horosphere is also fixed point free. Since the horosphere is isometric with the Euclidean plane, the stabilizer must be isomorphic with one of the fix point free plane crystallographic group or . The vertex classes and the corresponding stabilizer groups form the so-called cusp structure which play an important role to decide whether two face identifications generate isomorphic space groups or not. If the cusp structures are different, then the groups cannot be isomorphic.
If a face identification generates a fixed point free space group then the fundamental group of the determined manifold is also , while the first homology group is the commutator factor group of . This group can be compute easily from the defining relations of . The first homology group is also an important tool in the examination of isomorphism. In this way we can recognise if two infinite groups are not isomorphic. However, usually the question of isomorphism of infinite groups is difficult. This is the reason why we can say only a lower limit for the number of generated groups in certain cases.
In
Table 2 we summarise the results related to the regular tilings of 3-dimensional spaces of constant curvature. The classification of (not only regular) simplex tilings can be found in [
6,
13,
14,
15]. In [
14,
15] the examination was extended also to the other homogeneous 3-spaces. The octahedron manifolds were discovered by J. M. Montesinos [
8], B. Everitt [
16] and M. Šarać, while the 3 icosahedron manifolds were enumerated by L. A. Best [
9]. The spherical dodecahedron spaces were discovered by H. Poincaré, P. J. Lorimer [
17] and B. Everitt [
16].
In
Table 2 we can see that the dodecahedron has 12 essentially different face identifications which generate fixed point free orientation preserving transformation groups acting simply transitively on the
tiling of the hyperbolic space. These face identifications determine compact orientable hyperbolic manifolds. Considering their first homology groups we obtain that there are at least 7 different ones among them. Our algorithm also shows that compact non-orientable hyperbolic dodecahedron manifolds do not exist. The first compact hyperbolic dodecahedron manifold was discovered by C. Weber and H. Seifert [
18]. Then L. A. Best listed 7 more ones in [
9], however 3 of them were not different. Finally, the complete list was created by our algorithm in [
19], determining at least 3 new manifolds according to their first homology groups.
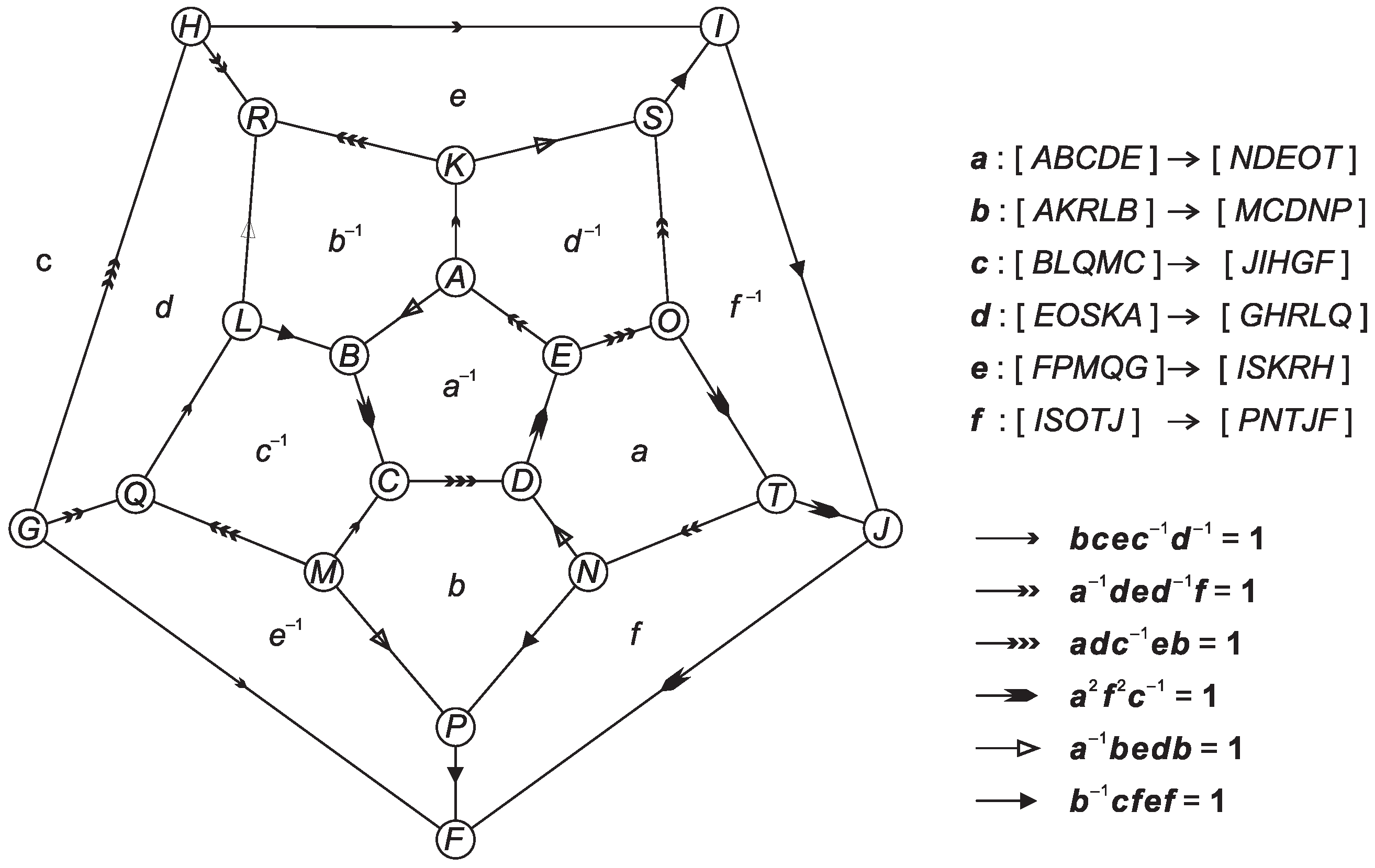
In
Figure 10 we can see one of these face identifications. The orientation preserving face identifying generators
,
,
,
,
,
map the faces
,
,
,
,
,
onto
a,
b,
c,
d,
e,
f mapping the dodecahedron onto its neighbours along
a,
b,
c,
d,
e,
f, respectively. Similarly, the inverses of the generators
,
,
,
,
,
map the faces
a,
b,
c,
d,
e,
f onto
,
,
,
,
,
mapping the dodecahedron onto its neighbours along
,
,
,
,
,
, respectively. The Poincaré algorithm yields 6 defining relations of word length 5 forming 6 classes of directed edges. In
Figure 10 the edges belonging to common class are denoted by the same type of arrows. According to the condition that there are 5 dodecahedra around the edges in tiling
, each edge class contains exactly 5 directed edges which are mapped onto each other during the transformations tile around one of them. We can also recognize that the 20 vertices belong to only one class as the face identification prescribes, according to the icosahedral vertex figure of
. In this way fixed points cannot be appeared. The dodecahedron as a tile in
is compact, moreover the identifying transformations and so the generated group
preserves the orientation. Thus the face identification determines an orientable compact manifold with fundamental group
. Finally, as the Abelianization of
we get the first homology group
(the cyclic group of order 29) of the manifold. This homology group belongs to only this identification so
cannot be isomorphic with the fundamental groups determined by the other identifications.
In the last line of
Table 2 we can see the results for the hyperbolic dodecahedron tiling
in which the vertices are ideal points. Among them the 10 face identifications determining orientable non-compact manifolds were discovered independently by B. Everitt [
16] (clearly with algebraic tools) and by the author [
19], while the 68 face identifications yielding non-orientable non-compact hyperbolic manifolds were new results in [
19].












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}

