Dynamic Parameter Identification of a Pointing Mechanism Considering the Joint Clearance

Abstract
:1. Introduction
2. Nonlinear Dynamic Model of the Pointing Mechanism
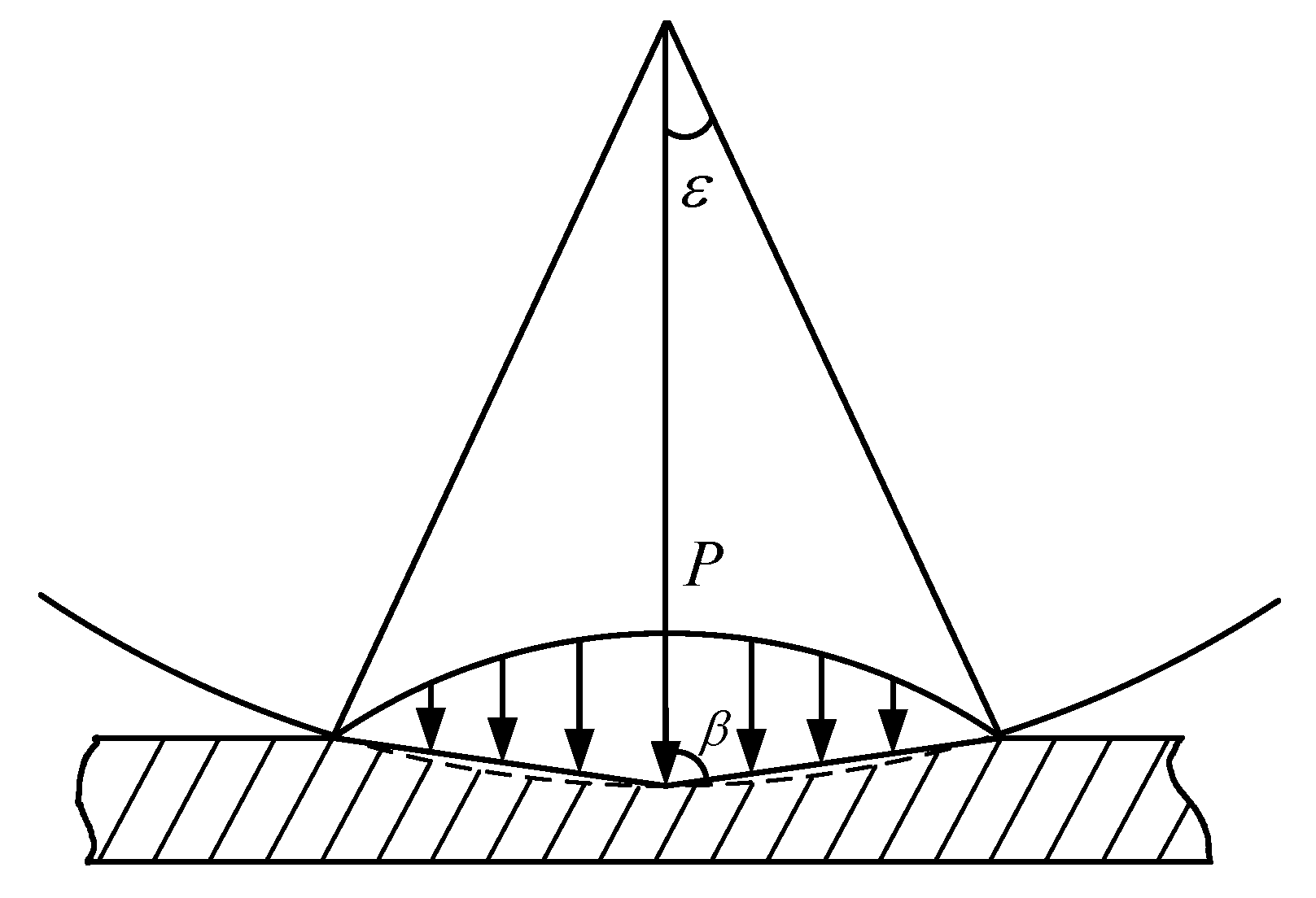
2.1. Normal Contact Force Model
2.2. The Friction Model
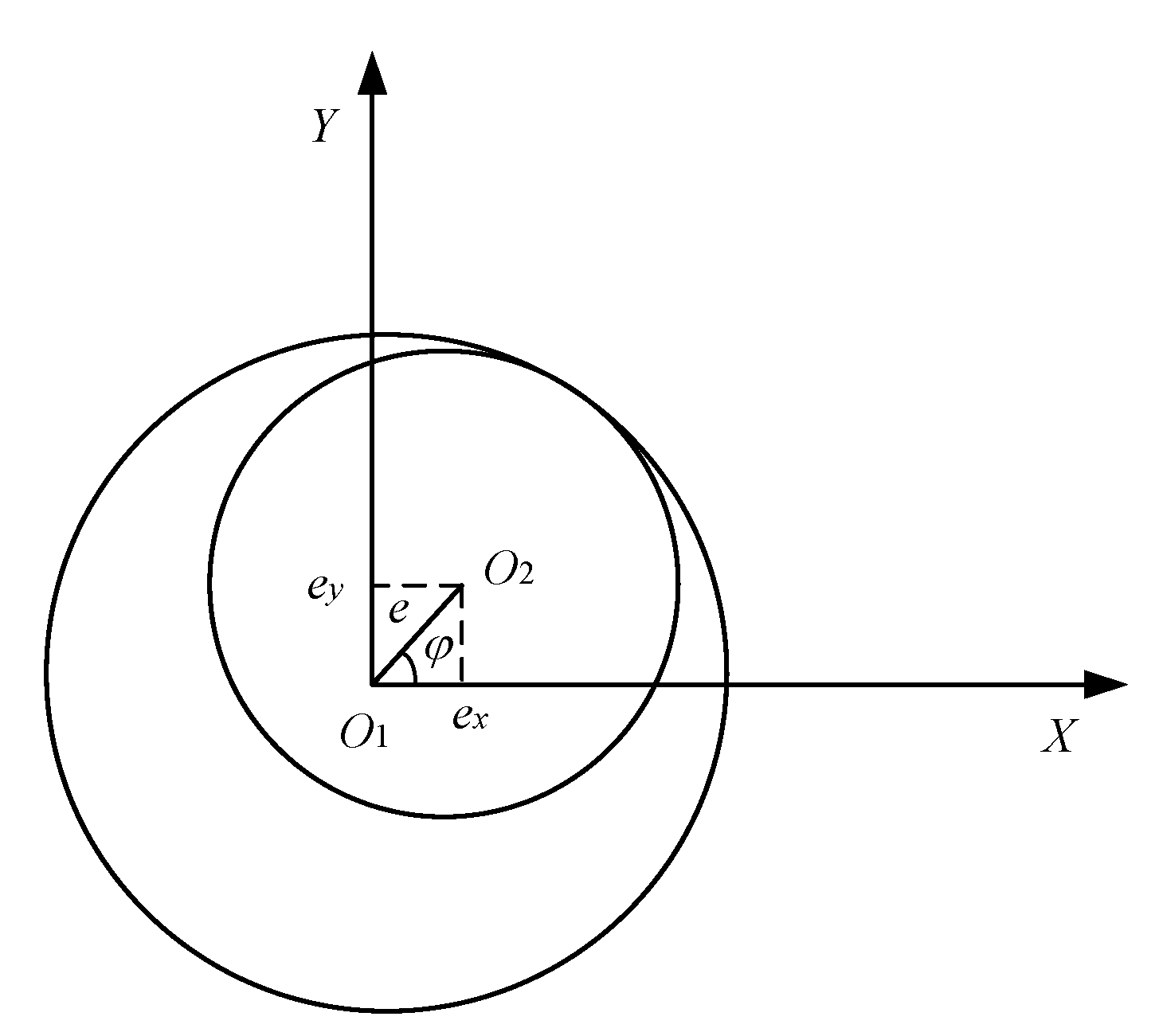
2.3. Collision Force Model of Revolute Joint with Clearance
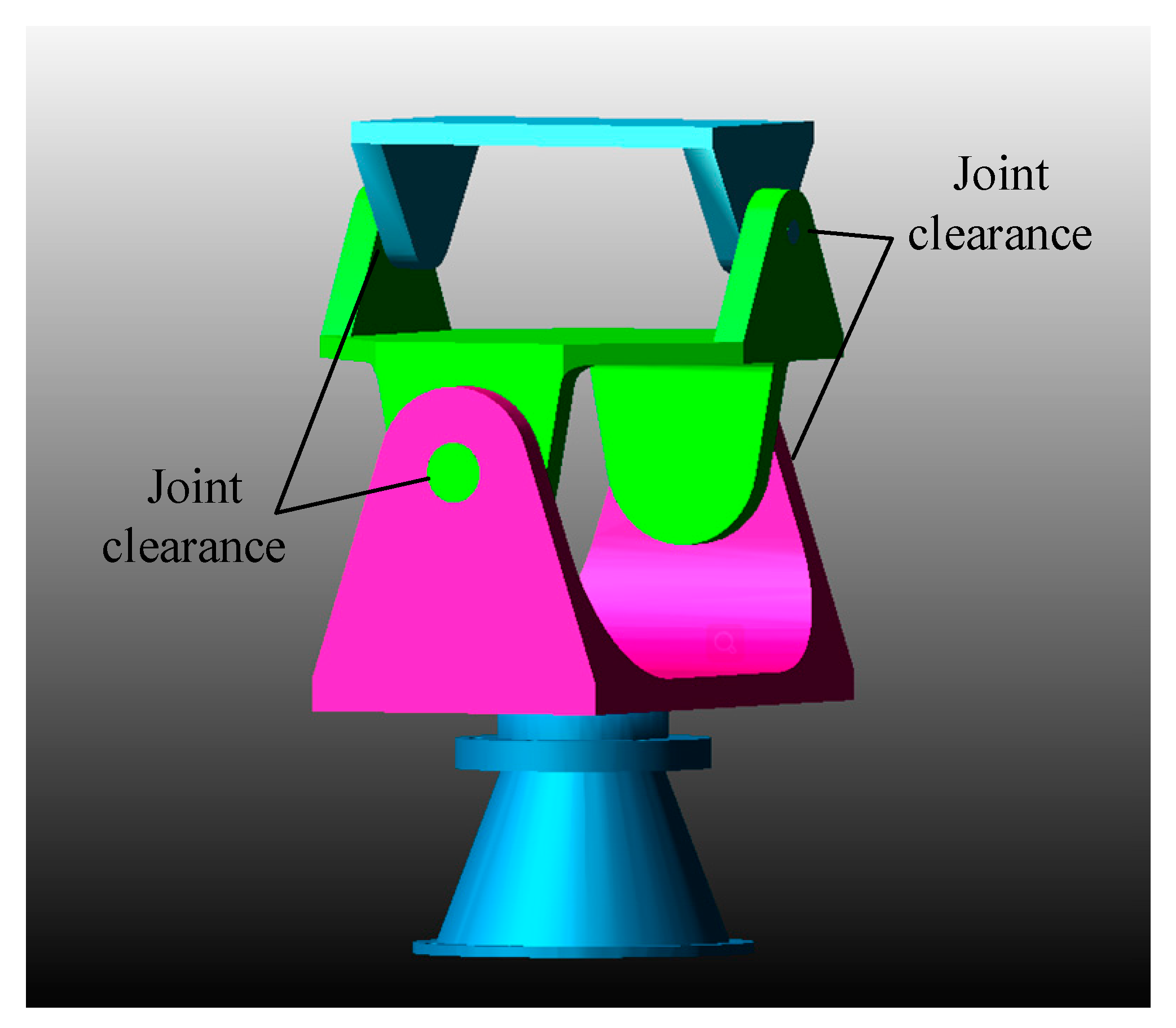
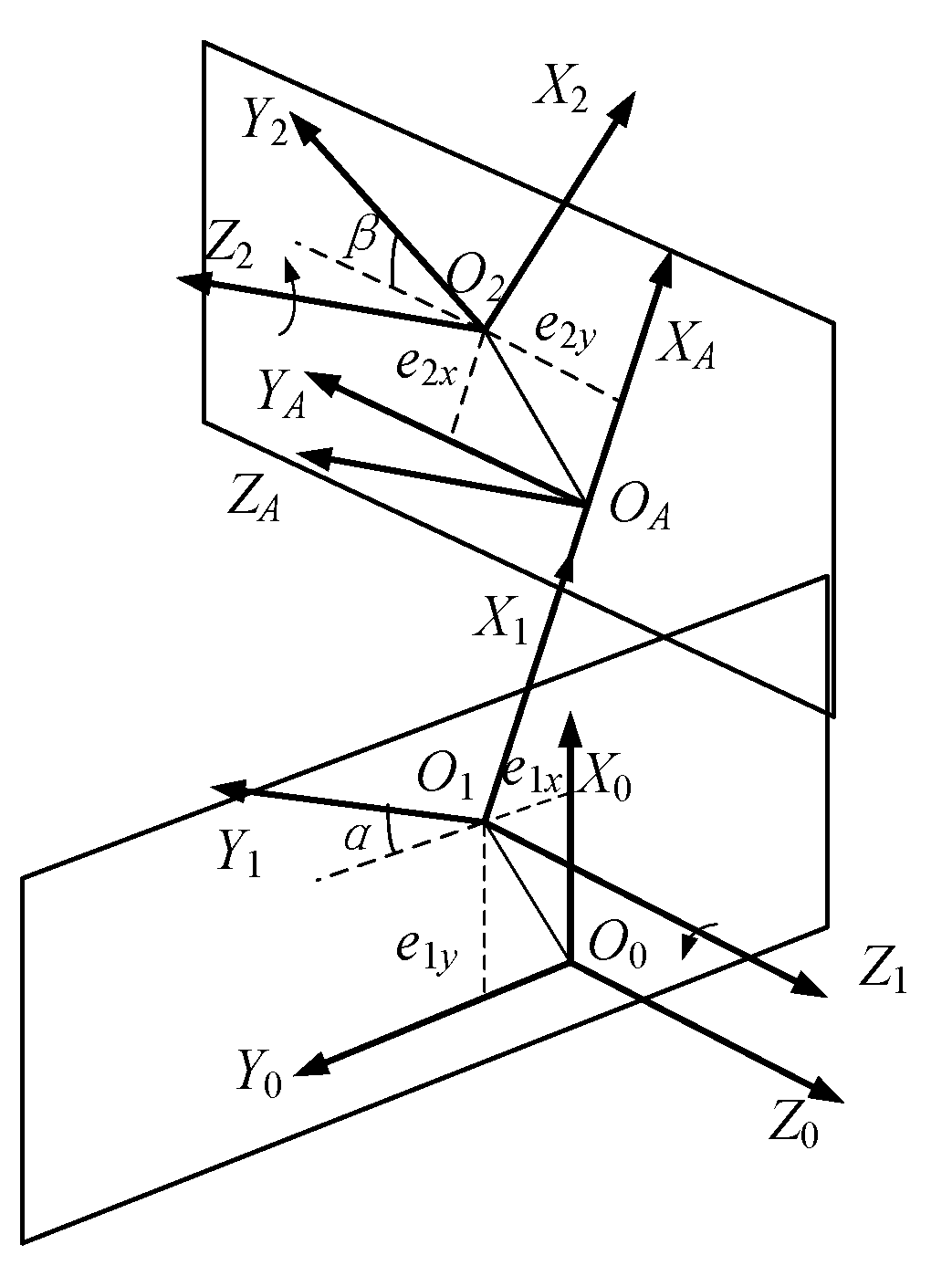
2.4. Dynamic Modeling of X–Y Pointing Mechanism with Clearance
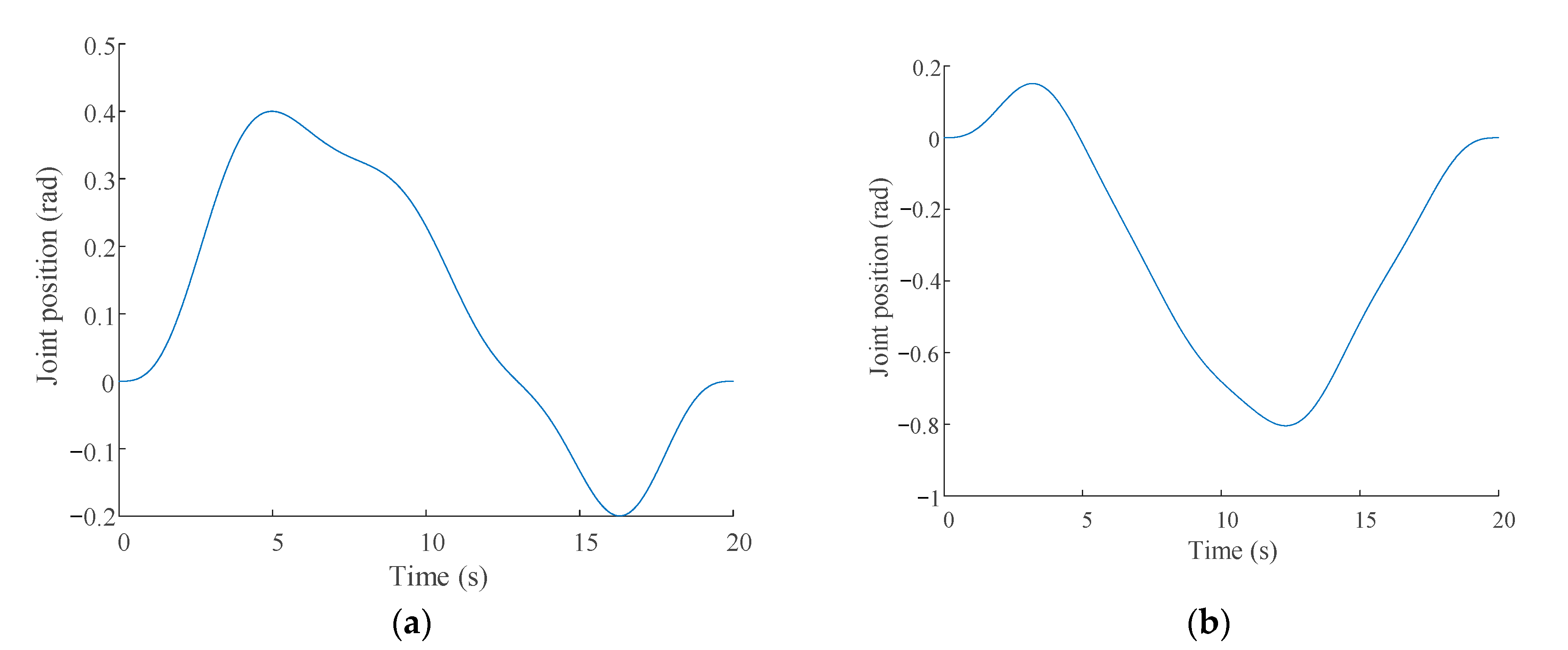
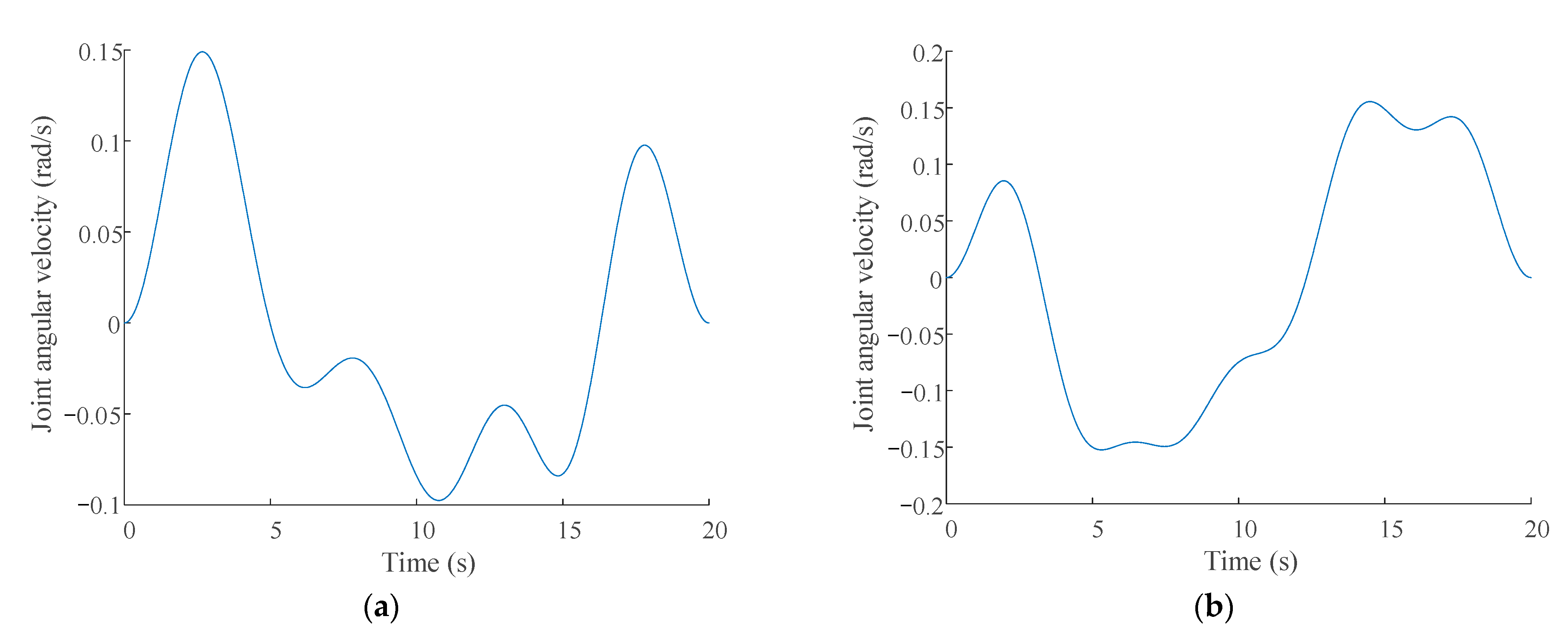
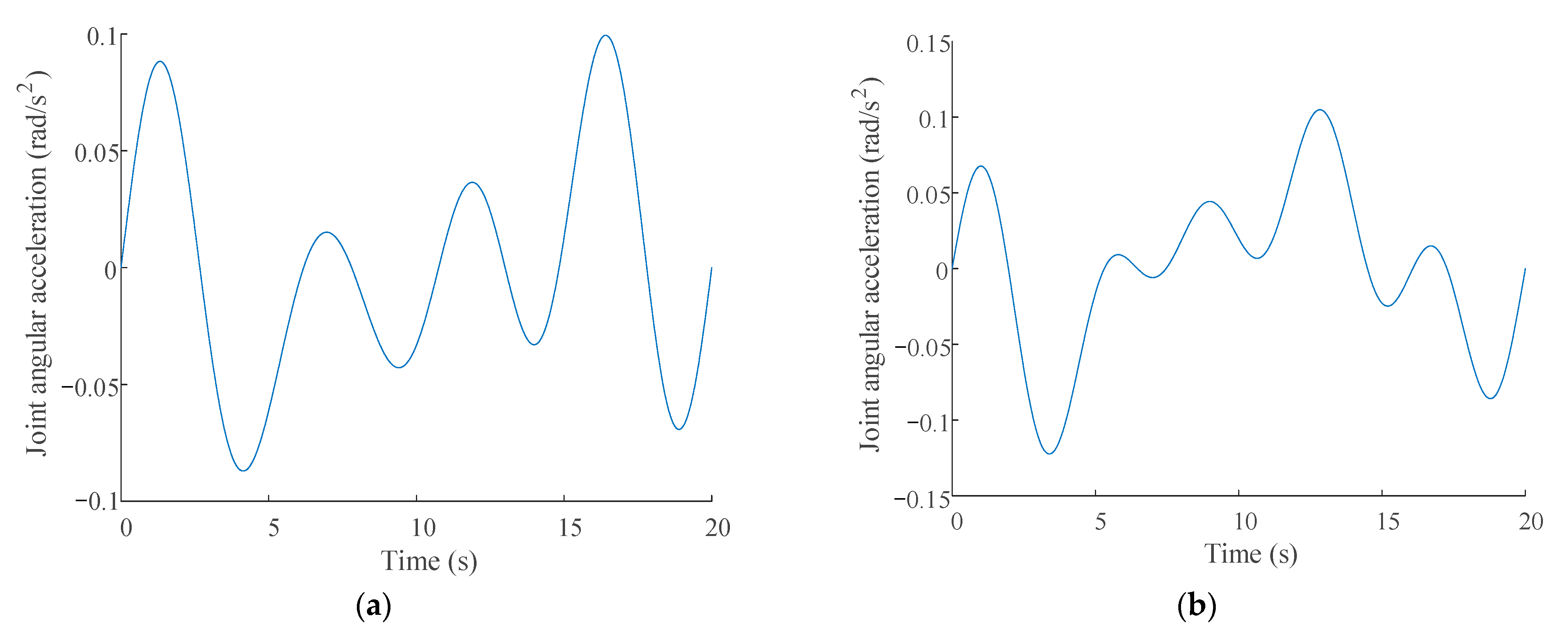
3. Excitation Trajectory of the X–Y Pointing Mechanism
4. Dynamic Parameter Identification of the Pointing Mechanism
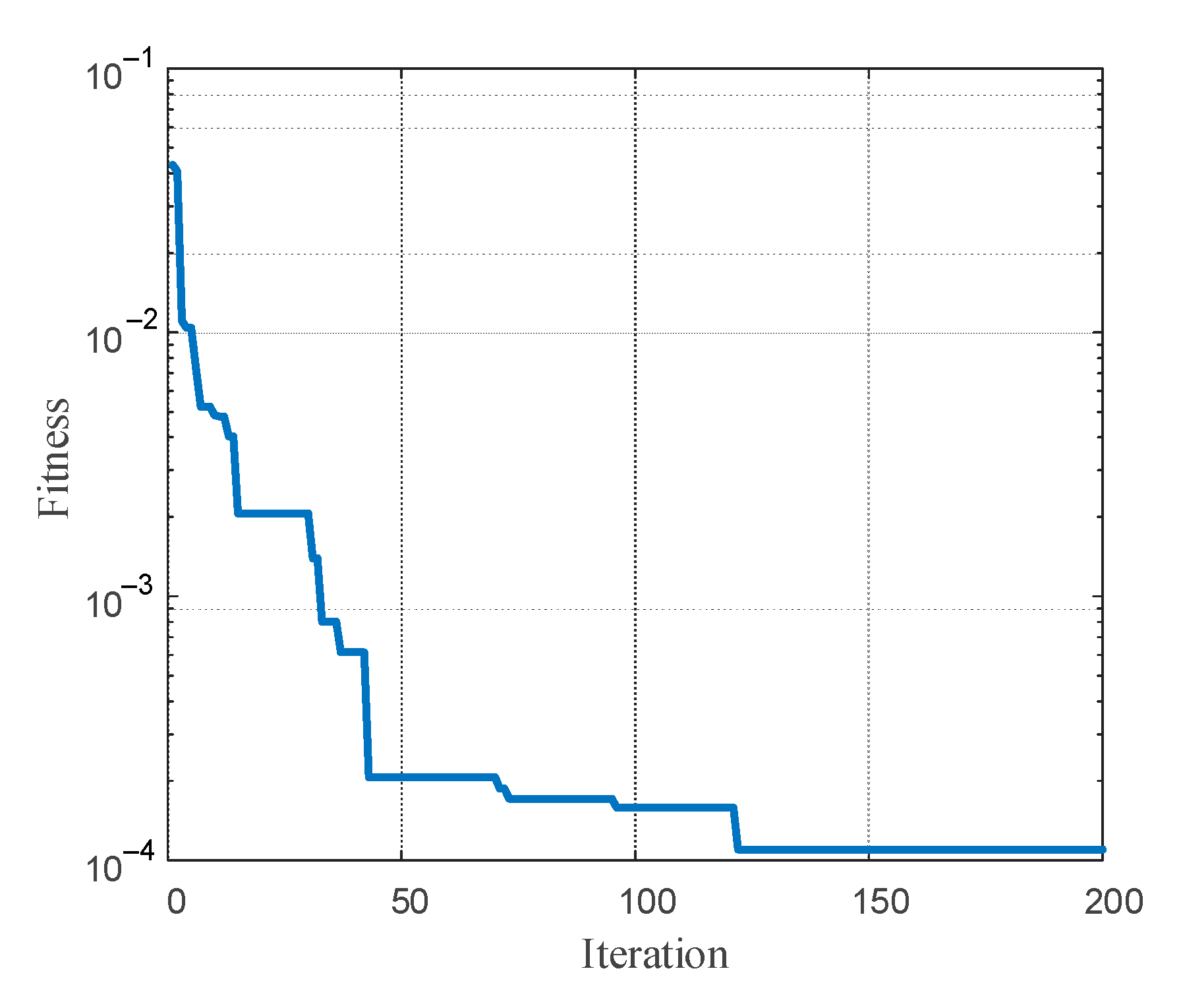
4.1. ABC Algorithm
4.2. Dynamic Simulation and Parameter Identification
4.3. Results and Discussion
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Yu, J.; Wu, K.; Zong, G.; Kong, X. A Comparative Study on Motion Characteristics of Three Two-Degree-of-Freedom Pointing Mechanisms. J. Mech. Robot. 2016, 8, 021027. [Google Scholar] [CrossRef]
- Muhammad, A.; Jingjun, Y.; Yan, X.; Abdus, S. Conceptual design, modeling and compliance characterization of a novel 2-DOF rotational pointing mechanism for fast steering mirror. Chin. J. Aeronaut. 2020. [Google Scholar] [CrossRef]
- Wu, J.; Wang, J.; You, Z. An overview of dynamic parameter identification of robots. Robot. Comput. Integr. Manuf. 2010, 26, 414–419. [Google Scholar] [CrossRef]
- Qin, Z.; Baron, R.L.; Birglen, R. A new approach to the dynamic parameter identification of robotic manipulators. Robotica 2010, 28, 539–547. [Google Scholar] [CrossRef] [Green Version]
- Tourassis, V.D.; Neuman, C.P. The inertial characteristics of dynamic robot models. Mech. Mach. Theory 1985, 20, 41–52. [Google Scholar] [CrossRef]
- Vivas, A.; Poignet, P.; Marquet, F.; Gautier, M. Experimental dynamic identification of a fully parallel robot. In Proceedings of the IEEE International Conference on Robotics and Automation, Taipei, Taiwan, 14–19 September 2003; pp. 3278–3283. [Google Scholar]
- Bona, B.; Indri, M.; Smaldone, N. Rapid Prototyping of a Model-Based Control with Friction Compensation for a Direct-Drive Robot. IEEE ASME Trans. Mechatron. 2006, 11, 576–584. [Google Scholar] [CrossRef]
- Swevers, J.; Verdonck, W.; Schutter, J. Dynamic Model Identification for Industrial Robots. IEEE ASME Trans. Mechatron. 2007, 27, 58–71. [Google Scholar]
- Calanca, A.; Capisani, L.M.; Ferrara, A.; Magnani, L. MIMO closed loop identification of an industrial robot. IEEE Trans. Control Syst. Technol. 2010, 19, 1214–1224. [Google Scholar] [CrossRef]
- Atkeson, C.G.; An, C.H.; Hollerbach, J.M. Estimation of inertial parameters of manipulator loads and links. Int. J. Robot. Res. 1986, 5, 101–119. [Google Scholar] [CrossRef]
- Huo, X.; Lian, B.; Wang, P.; Song, T.; Sun, T. Dynamic identification of a tracking parallel mechanism. Mech. Mach. Theory 2020, 155, 104091. [Google Scholar] [CrossRef]
- Pukelsheim, F. Optimal Design of Experiments; The Society for Industrial and Applied Mathe Matics: New York, NY, USA, 2006; pp. 408–454. [Google Scholar]
- Swevers, J.; Ganseman, C.; De Schutter, J.; Van Brussel, H. Generation of periodic trajectories for optimal robot excitation. ASME J. Manuf. Sci. Eng. 1997, 119, 611–615. [Google Scholar] [CrossRef]
- Gautier, M. Optimal motion planning for robot’s inertial parameters identification. In Proceedings of the 31st IEEE Conference on Decision and Control, Tucson, AZ, USA, 16–18 December 1992; Volume 1, pp. 70–73. [Google Scholar]
- Armstrong, B. On finding exciting trajectories for identification experiments involving systems with nonlinear dynamics. Int. J. Robot. Res. 1989, 8, 28–48. [Google Scholar] [CrossRef]
- Karaboga, D. An Idea Based on Honey Bee Swarm for Numerical Optimization; Technical Report-tr06; Erciyes University: Kayseri, Turkey, 2005. [Google Scholar]
- Park, K.J. Fourier-based optimal excitation trajectories for the dynamic identification of robots. Robotica 2006, 24, 625. [Google Scholar] [CrossRef]
- Gautier, M.; Janot, A.; Vandanjon, P.O. A new closed-loop output error method for parameter identification of robot dynamics. IEEE Trans. Control Syst. Technol. 2013, 21, 428–444. [Google Scholar] [CrossRef] [Green Version]
- Gautier, M.; Poignet, P. Extended Kalman filtering and weighted least squares dynamic identification of robot. Control Eng. Pract. 2001, 9, 1361–1372. [Google Scholar] [CrossRef]
- Kozlowski, K.R. Modelling and Identification in Robotics; Springer: London, UK, 2012; pp. 47–81. [Google Scholar]
- Ha, I.J.; Ko, M.S.; Kwon, S.K. An efficient estimation algorithm for the model parameters of robotic manipulators. IEEE Trans. Robot. Automat. 1989, 5, 386–394. [Google Scholar] [CrossRef]
- Xuan, J.; Liu, J.G.; Zhu, S.F. Identification method of hydrodynamic parameters of autonomous underwater vehicle based on genetic algorithm. J. Mech. Eng. 2010, 46, 96–100. [Google Scholar]
- Ding, L.; Wu, H.; Yao, Y.; Yang, Y.X. Dynamic model identification for 6-DOF industrial robots. J. Robot. 2015, 2015. [Google Scholar] [CrossRef] [Green Version]
- Ding, L.; Wu, H.; Yao, Y. Chaotic artificial bee colony algorithm for system identification of a small-scale unmanned helicopter. Int. J. Aerosp. Eng. 2015, 2015. [Google Scholar] [CrossRef]
- Karaboga, D.; Basturk, B. On the performance of artificial bee colony (ABC) algorithm. Appl. Soft Comput. 2008, 8, 687–697. [Google Scholar] [CrossRef]
- Swevers, J.; Ganseman, C.; Tukel, D.B.; DeSchutter, J.; VanBrussel, H. Optimal robot excitation and identification. IEEE Trans. Robot. Automat. 1997, 13, 730–740. [Google Scholar] [CrossRef] [Green Version]
- Chen, X.; Jiang, S.; Wang, S.; Deng, Y. Dynamics analysis of planar multi-DOF mechanism with multiple revolute clearances and chaos identification of revolute clearance joints. Multibody Syst. Dyn. 2019, 47, 317–345. [Google Scholar] [CrossRef]
- Schwab, A.L.; Meijaard, J.P.; Meijers, P. A comparison of revolute joint clearance models in the dynamic analysis of rigid and elastic mechanical systems. Mech. Mach. Theory 2002, 37, 895–913. [Google Scholar] [CrossRef]
- Wang, Z.; Tian, Q.; Hu, H.; Flores, P. Nonlinear dynamics and chaotic control of a flexible multibody system with uncertain joint clearance. Nonlinear Dyn. 2016, 86, 1571–1597. [Google Scholar] [CrossRef]
- Chen, X.; Jia, Y.; Deng, Y.; Wang, Q. Dynamics behavior analysis of parallel mechanism with joint clearance and flexible links. Shock Vib. 2018, 2018. [Google Scholar] [CrossRef] [Green Version]
- Xiang, W.; Yan, S.; Wu, J. Dynamic analysis of planar mechanical systems considering stick-slip and Stribeck effect in revolute clearance joints. Nonlinear Dyn. 2019, 95, 321–341. [Google Scholar] [CrossRef]
- Erkaya, S. Effects of Joint Clearance on the Motion Accuracy of Robotic Manipulators. J. Mech. Eng. 2018, 64, 82–94. [Google Scholar]
- Flores, P.; Koshy, C.S.; Lankarani, H.M.; Ambrósio, J.; Claro, J.C.P. Numerical and experimental investigation on multibody systems with revolute clearance joints. Nonlinear Dyn. 2011, 65, 383–398. [Google Scholar] [CrossRef] [Green Version]
- Zhang, Z.; Xu, L.; Flores, P.; Lankarani, H.M. A Kriging model for dynamics of mechanical systems with revolute joint clearances. ASME J. Comput. Nonlinear Dynam. 2014, 9, 031013. [Google Scholar] [CrossRef]
- Li, K.L.; Tsai, Y.K.; Chan, K.Y. Identifying joint clearance via robot manipulation. Proc. Inst. Mech. Eng. C J. Mech. Eng. Sci. 2018, 232, 2549–2574. [Google Scholar] [CrossRef]
- Ruderman, M.; Hoffmann, F.; Bertram, T. Modeling and identification of elastic robot joints with hysteresis and backlash. IEEE Trans. Ind. Electron. 2009, 56, 3840–3847. [Google Scholar] [CrossRef]
- Erkaya, S.; Uzmay, I. Determining link parameters using genetic algorithm in mechanisms with joint clearance. Mech. Mach. Theory 2009, 44, 222–234. [Google Scholar] [CrossRef]
- Han, X.; Li, F.; Gao, Z.; Li, S. Dynamic Characteristics of Space Mechanism Considering Friction and Stiffness. CJME 2020, 56, 170–180. [Google Scholar]
- Whitehouse, D.J.; Archard, J.F. The Properties of Random Surfaces of Significance in their Contact. Proc. Math. Phys. Eng. Sci. 1971, 316, 97–121. [Google Scholar]
- Wang, S.; Komvopoulos, K. A Fractal Theory of the Interfacial Temperature Distribution in the Slow Sliding Regime: Part I—Elastic Contact and Heat Transfer Analysis. J. Tribol. 1994, 116, 812–822. [Google Scholar] [CrossRef]
- Li, S.; Han, X.; Wang, J.; Sun, J.; Li, F. Contact Model of Revolute Joint with Clearance Based on Fractal Theory. CJME 2018, 31. [Google Scholar] [CrossRef] [Green Version]
- Kogut, L.; Etsion, I. Elastic-plastic contact analy sis ofa sphere and a rigid flat. ASME J. 2002, 69, 657–662. [Google Scholar]
- Hertz, H. Ueber die Berührung fester elastischer Körper. J. Für Die Reine Und Angew. Math. 2006, 1882, 156–171. [Google Scholar]
- Majumdar, A.; Bhushan, B. Fractal Model of Elastic Lastic Contact between Rough Surfaces. ASME J. Tribol. 1991, 113, 1–11. [Google Scholar] [CrossRef]
- Flores, P.; Lankarani, H.M. Dynamic response of multibody systems with multiple clearance joints. ASME J. Comput. Nonlinear Dyn. 2012, 7, 031003. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Link Number i | Parameter Number k | |||
|---|---|---|---|---|
| 1 | 1 | 0.111 | 0.243 | −0.113 |
| 2 | −6.5 × 10−10 | −0.01 | ||
| 3 | −0.028 | 0.001 | ||
| 4 | −0.033 | 0.013 | ||
| 5 | −0.005 | −0.003 | ||
| 2 | 1 | −0.306 | 0.251 | 0.372 |
| 2 | −0.029 | −0.037 | ||
| 3 | −0.016 | −0.033 | ||
| 4 | −0.015 | 0.003 | ||
| 5 | −0.017 | 0.001 |
| Parameter | Initial Value | Remarks |
|---|---|---|
| MaxIt | 200 | Number of population iterations |
| Npop | 100 | Number of employed bees |
| Nonlooker | 100 | Number of onlookers |
| a | 0.5 | Acceleration factor |
| Nvar | 10/3 | Number of food sources: shafting 1, 3; shafting 2, 10. |
| L | 600 | Experimental constraints of food sources |
| Identification | System Value | Identification of Clearance Model | Ideal Model Identification | Error Ratio |
|---|---|---|---|---|
| (kg·m2) | 0.00467 | 0.00685 | 0.00077 | 0.55897 |
| (kg·m2) | 0 | 0.00803 | 0.00343 | 2.34111 |
| (kg·m2) | 0 | 0.00296 | 0.00783 | 0.37803 |
| (kg·m2) | 0.00533 | 0.00967 | 0.00474 | 7.427356 |
| (kg·m2) | 0 | 0.00189 | 0.00340 | 0.55588 |
| (kg·m2) | 0.00181 | 0.00131 | 0.00640 | 0.10893 |
| (kg) | 0.8596 | 0.84191 | 0.82352 | 0.49029 |
| (m) | 0.03419 | 0.03394 | 0.03274 | 0.17241 |
| (kg·m2) | 0.0175 | 0.00834 | 0.00486 | 0.72468 |
| (m) | 2.1391 | 2.13699 | 2.08471 | 0.03879 |
| (kg) | 0.04821 | 0.04815 | 0.05241 | 0.01425 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sun, J.; Han, X.; Li, T.; Li, S. Dynamic Parameter Identification of a Pointing Mechanism Considering the Joint Clearance. Robotics 2021, 10, 36. https://doi.org/10.3390/robotics10010036
Sun J, Han X, Li T, Li S. Dynamic Parameter Identification of a Pointing Mechanism Considering the Joint Clearance. Robotics. 2021; 10(1):36. https://doi.org/10.3390/robotics10010036
Chicago/Turabian StyleSun, Jing, Xueyan Han, Tong Li, and Shihua Li. 2021. "Dynamic Parameter Identification of a Pointing Mechanism Considering the Joint Clearance" Robotics 10, no. 1: 36. https://doi.org/10.3390/robotics10010036
APA StyleSun, J., Han, X., Li, T., & Li, S. (2021). Dynamic Parameter Identification of a Pointing Mechanism Considering the Joint Clearance. Robotics, 10(1), 36. https://doi.org/10.3390/robotics10010036