Investigation of Cyclicity of Kinematic Resolution Methods for Serial and Parallel Planar Manipulators

Abstract
:1. Introduction
- Null space methods: A particular solution of (2) is determined by adding a vector in the null-space of the Jacobian. The latter is usually the gradient of a scalar objective function that is to be maximized (or minimized).
- Task augmentation methods: Redundancy is eliminated by adding r auxiliary tasks, in order to make the overall system non-redundant.
2. Redundancy Resolution Methods
- PGMThe PGM exploits the fact that a general solution of the differential kinematics can be substituted to Equation (4) when a desired joint rate vector is projected into the null space of :with defined as the projector matrix. The added term generates self–motion of the kinematic chain without affecting the EE velocity. Vector can be chosen in order to make a scalar objective function stationary by using the gradient projection method, such that , with . may be any analytical differentiable function expressed in terms of the joint variables only.
- AJMA different approach is followed in the AJM. An additional constraint task is imposed to the original task of the EE. Following [7,12], the objective function is projected onto the null space of and imposed to be zero. Formally we can write:is an orthonormal basis for the null space of and is the gradient of with respect to the joint variables as in the previous method. Therefore, Equation (6) yields r independent constraints keeping at the extreme at each time of the trajectory starting from the initial configuration .The added Jacobian can simply obtained asthat leads to the CLIK kinematic resolution expressed as:
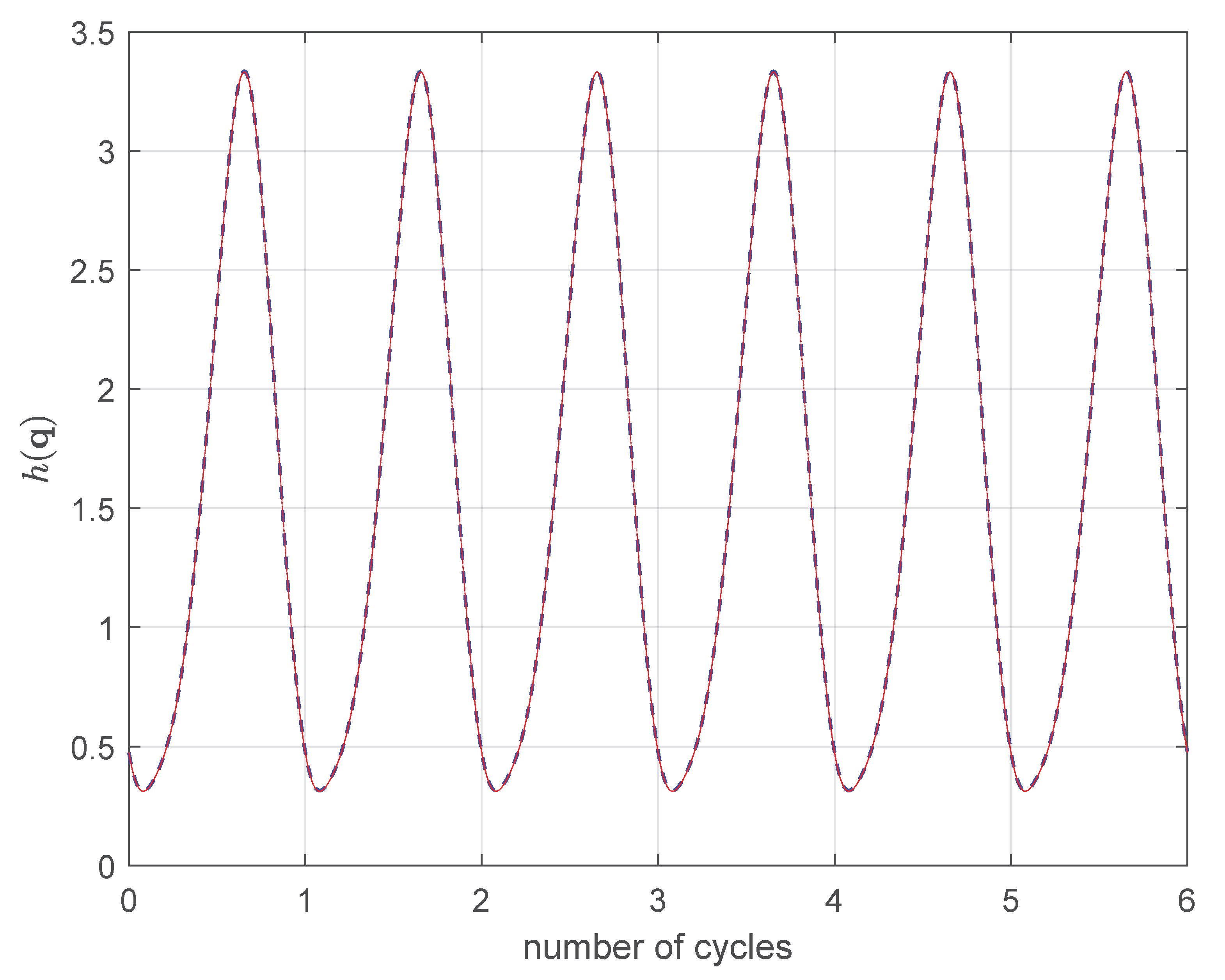
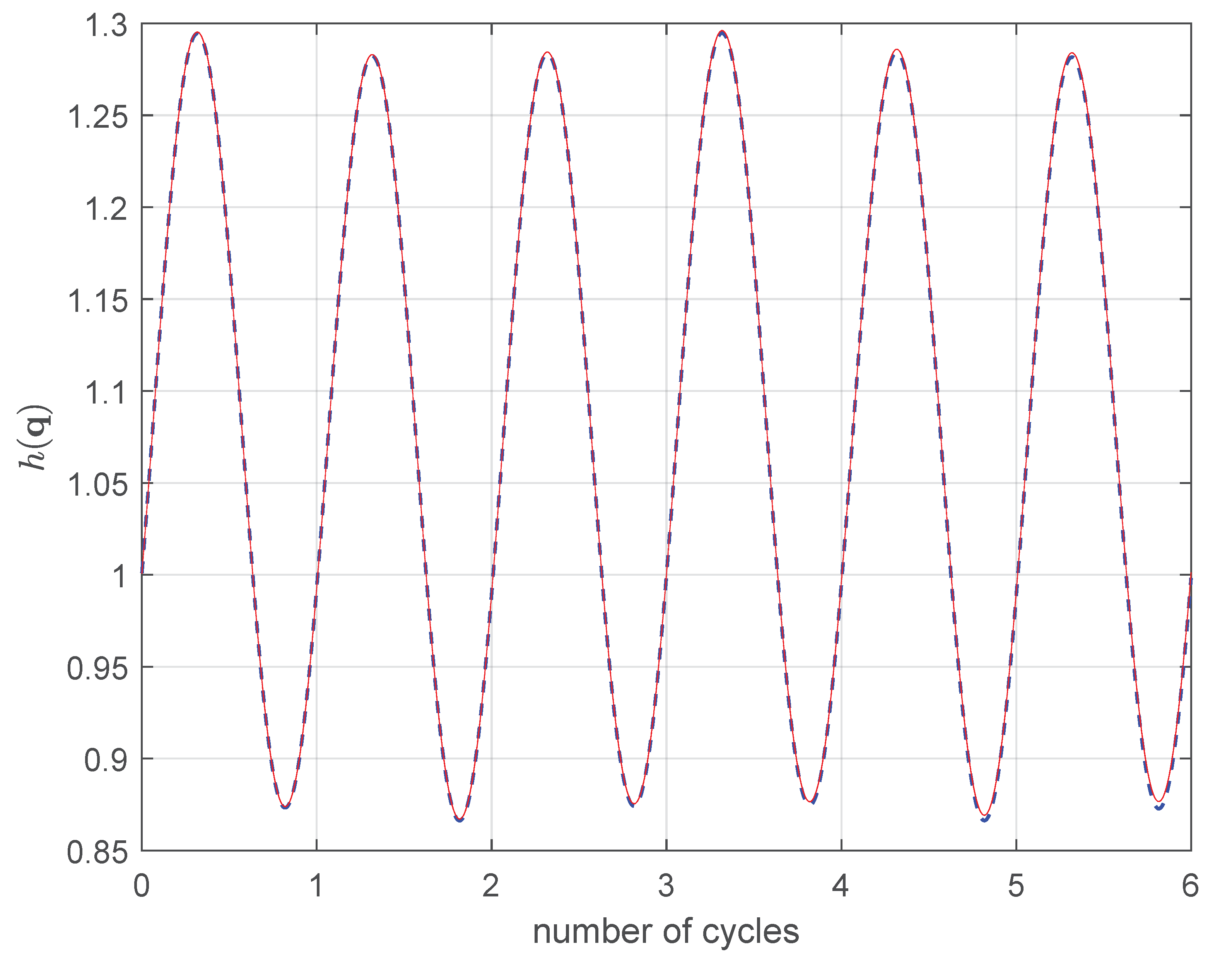
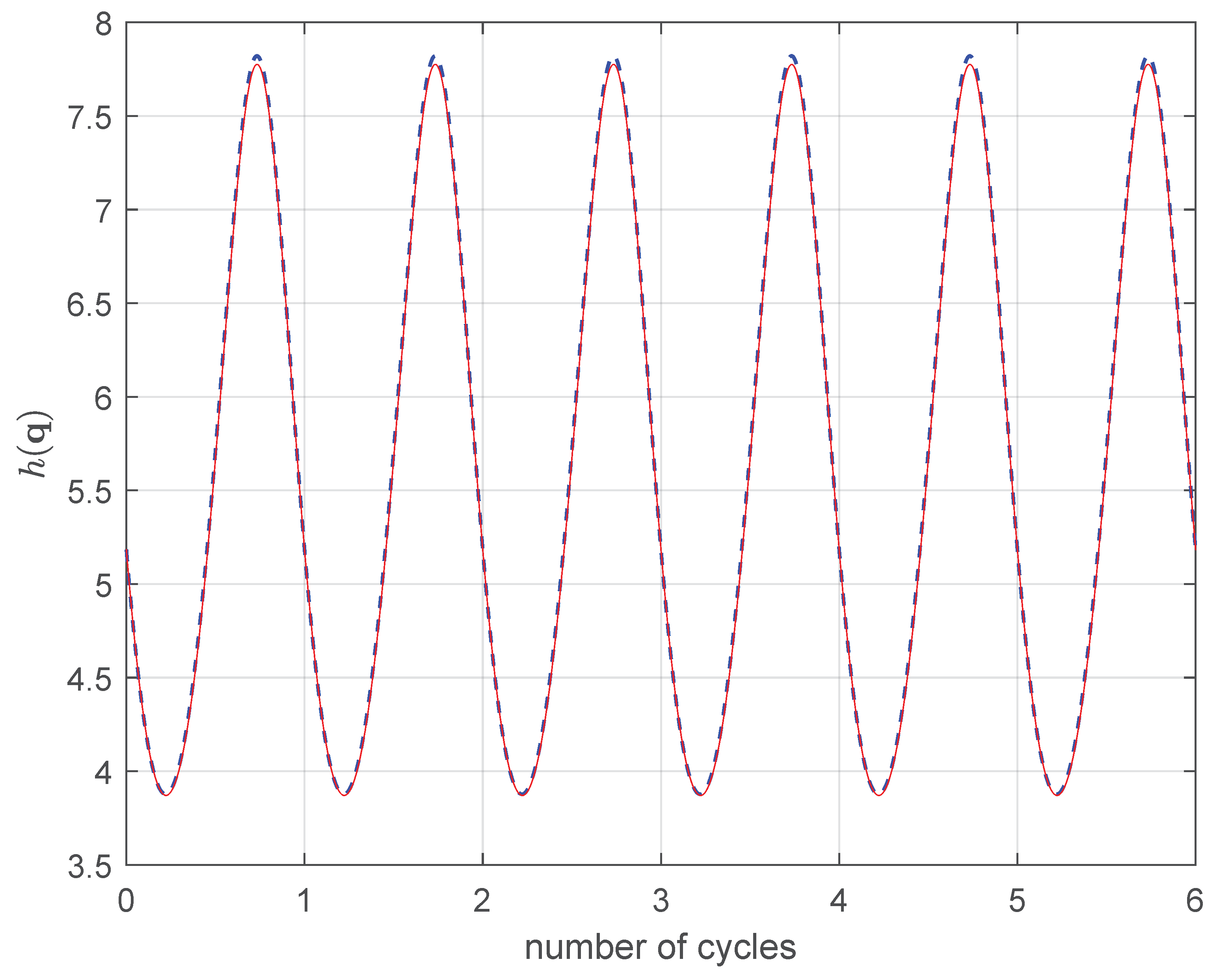
3. Numerical Simulations
3.1. Serial 4R
3.2. Parallel 2RRP
3.3. Serial 6R
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Nenchev, D.N. Redundancy Resolution through Local Optimization: A Review. J. Robot. Syst. 1989, 6, 769–798. [Google Scholar] [CrossRef]
- Siciliano, B. Kinematic Control of Redundant Robot Manipulators: A Tutorial. J. Lntelligent Robot. Syst. 1990, 3, 201–212. [Google Scholar] [CrossRef]
- Shamir, T.; Yomdin, Y. Repeatability of Redundant Manipulators: Mathematical Solution of the Problem. IEEE Trans. Autom. Control 1988, 33, 1004–1009. [Google Scholar] [CrossRef]
- Klein, C.A.; Kee, K.B. The nature of drift in pseudo-inverse control of kinematically redundant manipulators. IEEE Trans. Robot. Automat. 1989, RA-5, 231–234. [Google Scholar] [CrossRef]
- Luo, S.; Ahmad, S. Predicting the Drift Motion for Kinematically Redundant Robots. IEEE Trans. Syst. Man Cybern. 1992, 22, 717–728. [Google Scholar] [CrossRef]
- De Luca, A.; Lanari, L.; Oriolo, G. Control of Redundat Robots on Cyclic Trajectories. In Proceedings of the IEEE International Conference on Robotics and Automation, Nice, France, 12–14 May 1992; pp. 500–506. [Google Scholar]
- Baillieul, J. Kinematic programming alternatives for redundant manipulators. In Proceedings of the IEEE International Conference on Robot and Automation, St. Louis, MO, USA, 25–28 March 1985; pp. 772–778. [Google Scholar]
- Simas, H.; Di Gregorio, R. A Technique Based on Adaptive Extended Jacobians for Improving the Robustness of the Inverse Numerical Kinematics of Redundant Robots. J. Mech. Robot. 2019, 11, 020913. [Google Scholar] [CrossRef]
- Chembuly, V.V.M.J.S.; Voruganti, H.K. An Efficient Approach for Inverse Kinematics and Redundancy Resolution Scheme of Hyper-Redundant Manipulators. AIP Conf. Proc. 2018, 1943, 020019. [Google Scholar]
- Yahya, S.; Moghavvemi, M.; Mohamed, H.A.F. Geometrical Approach of Planar Hyper-Redundant Manipulators: Inverse Kinematics, Path Planning and Workspace. Simul. Modell. Pract. Theory 2011, 19, 406–422. [Google Scholar] [CrossRef]
- Perrusquía, A.; Yu, W.; Li, X. Multi-agent reinforcement learning for redundant robot control in task-space. Int. J. Mach. Learn. Cybern. 2020. [Google Scholar] [CrossRef]
- Chang, P.H. A closed-form solution for inverse kinematics of robot manipulators. IEEE J. Robot. Automat. 1987, 3, 393–403. [Google Scholar] [CrossRef]
- Boothby, W.M. An Introduction to Differentiable Manifolds and Riemannian Geometry; Academic Press: Cambridge, MA, USA, 2003. [Google Scholar]
- Klein, C.A.; Chu-Jenq, C.; Ahmed, S. A New Formulation of the Extended Jacobian Method and its Use in Mapping Algorithmic Singularities for Kinematically Redundant Manipulators. IEEE Trans. Robot. Autom. 1995, 11, 50–55. [Google Scholar] [CrossRef]
- Gosselin, C.; Angeles, J. Singularity Analysis of Closed-Loop Kinematic Chains. IEEE Trans. Robot. Autom. 1990, 6, 281–290. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| a = 0.5 m | = 1.0 m | = 1.0 m | R = 0.5 m |
| a = 0.2 m | H = 1 m | = 0.5 m | = 0.5 m | R = 0.1 m |
| = 0.572 m | m | = 0.496 m | R = 0.153 m | = 0.127 m |
| = 0.612 m | = 0.572 m | = 0.164 m | = 0.116 m | = 0.092 m |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ruggiu, M.; Müller, A. Investigation of Cyclicity of Kinematic Resolution Methods for Serial and Parallel Planar Manipulators. Robotics 2021, 10, 9. https://doi.org/10.3390/robotics10010009
Ruggiu M, Müller A. Investigation of Cyclicity of Kinematic Resolution Methods for Serial and Parallel Planar Manipulators. Robotics. 2021; 10(1):9. https://doi.org/10.3390/robotics10010009
Chicago/Turabian StyleRuggiu, Maurizio, and Andreas Müller. 2021. "Investigation of Cyclicity of Kinematic Resolution Methods for Serial and Parallel Planar Manipulators" Robotics 10, no. 1: 9. https://doi.org/10.3390/robotics10010009
APA StyleRuggiu, M., & Müller, A. (2021). Investigation of Cyclicity of Kinematic Resolution Methods for Serial and Parallel Planar Manipulators. Robotics, 10(1), 9. https://doi.org/10.3390/robotics10010009