
Multi-Robot Routing Problem with Min–Max Objective


Abstract
:1. Introduction
2. Problem Description
2.1. Problem Definition
- M is the number of robots
- N is the number of tasks ()
- Utility cost for doing each task
- Utility costs between robots-robots, tasks-tasks, and robots-tasks
- Each robot does at least one task.
- Each robot can have different start locations (multiple depots).
- The robots are not required to return to their starting locations (depots) after the task completion.
- The utility costs are asymmetric (the cost between two points A → B is not the same as between B → A).
- The utility costs need not obey triangle inequality.
2.2. Problem Name
2.3. Assumptions
2.4. Problem Classification
2.5. Computational Complexity
3. Related Work
3.1. Research Communities
3.1.1. Operations Research
3.1.2. Mathematics
3.1.3. Robotics/Artificial Intelligence
3.2. Approaches
3.2.1. Behavior-Based Models
3.2.2. Combinatorial Optimization
3.2.3. Auction-Bidding Algorithm
3.2.4. Graph Theory
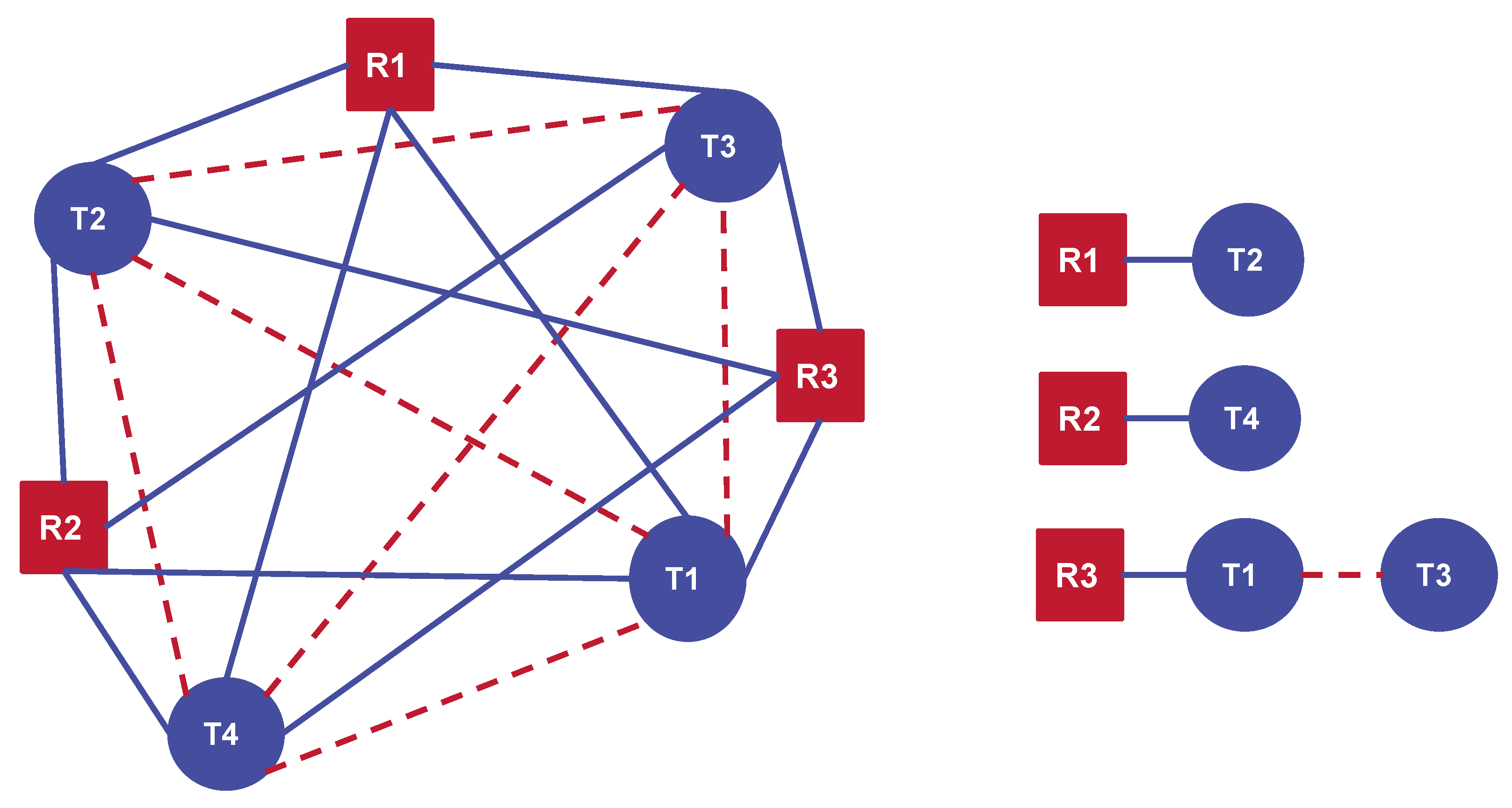
4. Permutation Matrix Approach
5. Methods
5.1. Simulated Annealing
5.2. Deterministic Annealing
5.3. Heuristic Graph Search
6. Experiments and Results
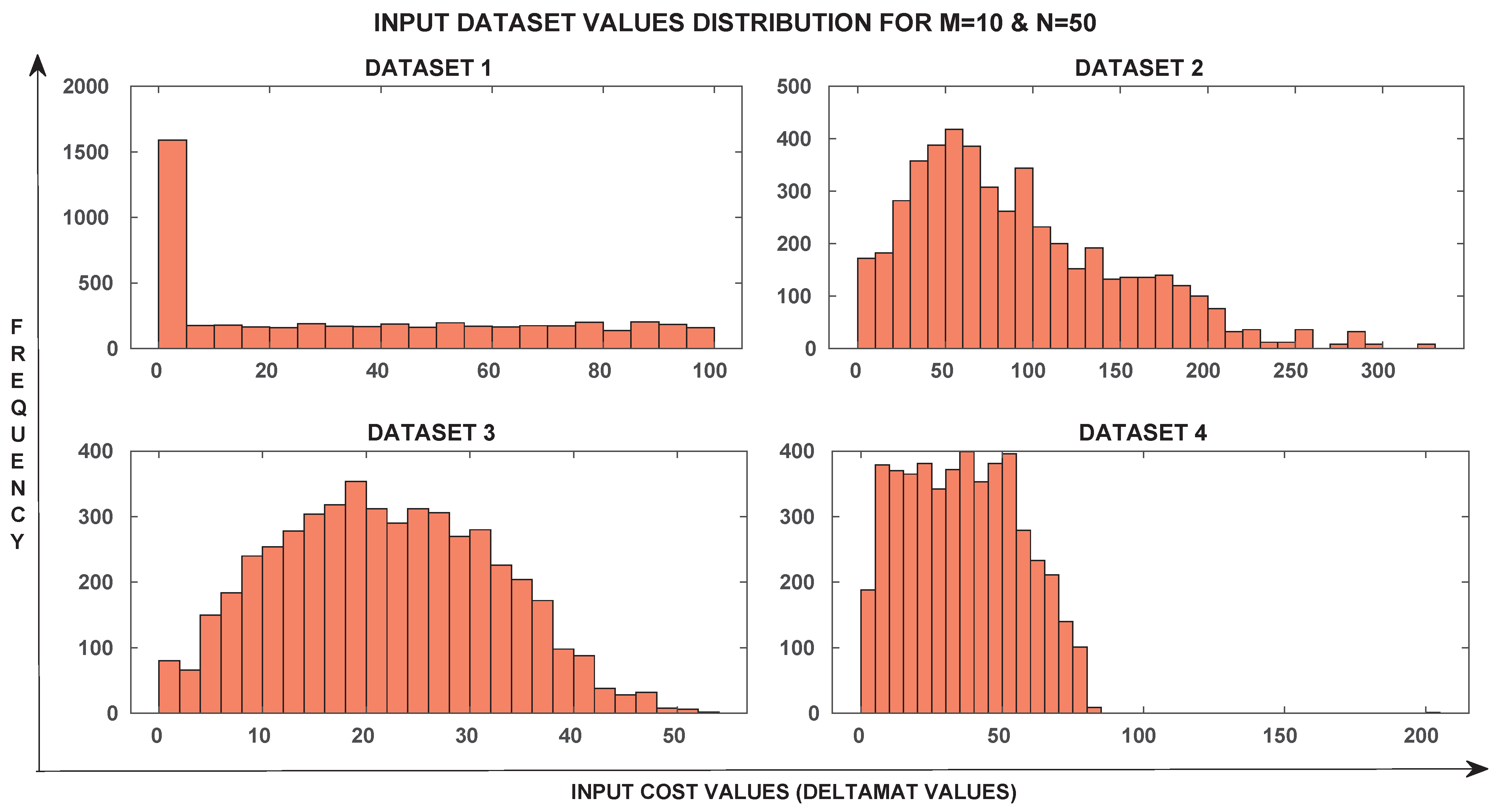
6.1. Datasets
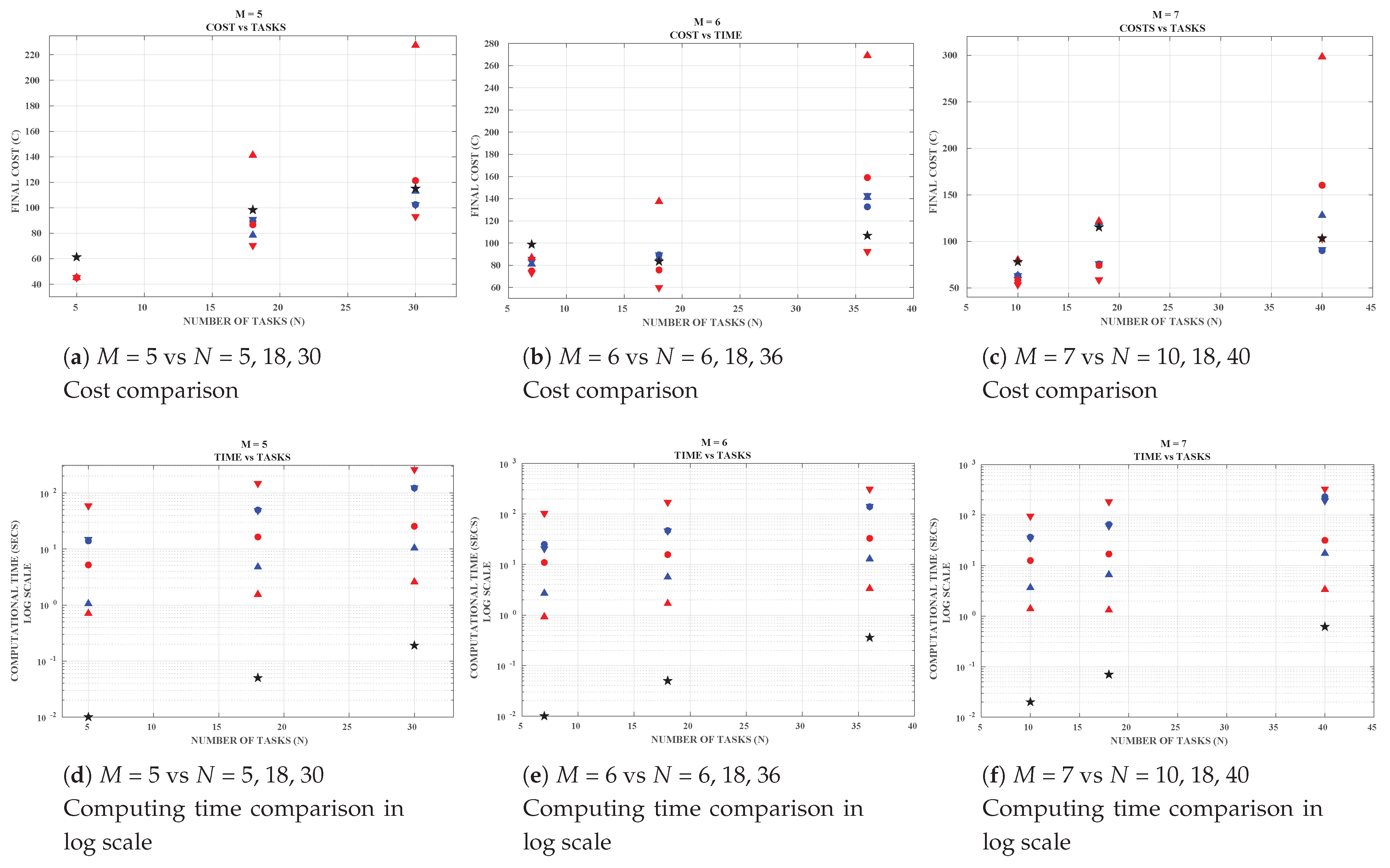
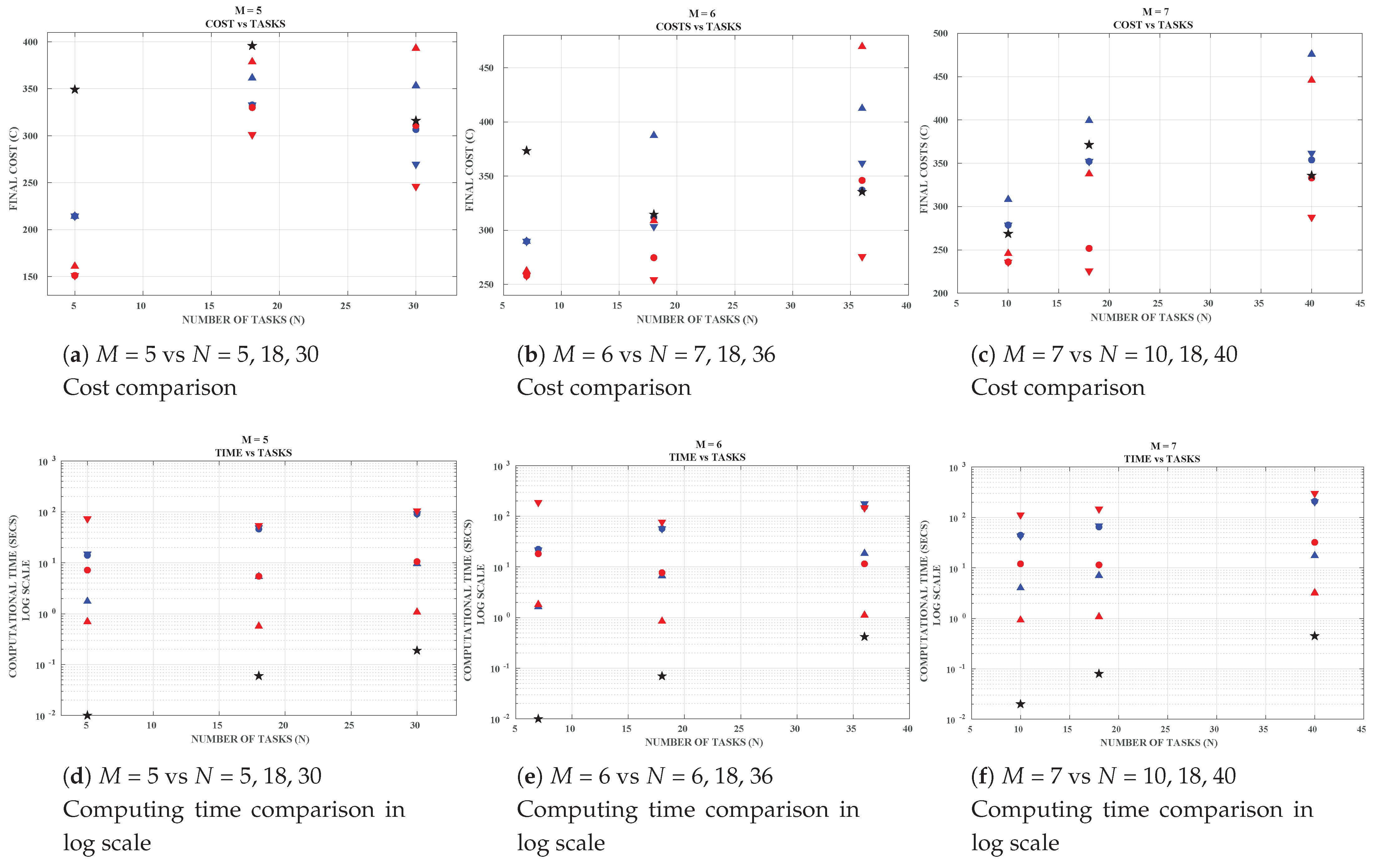
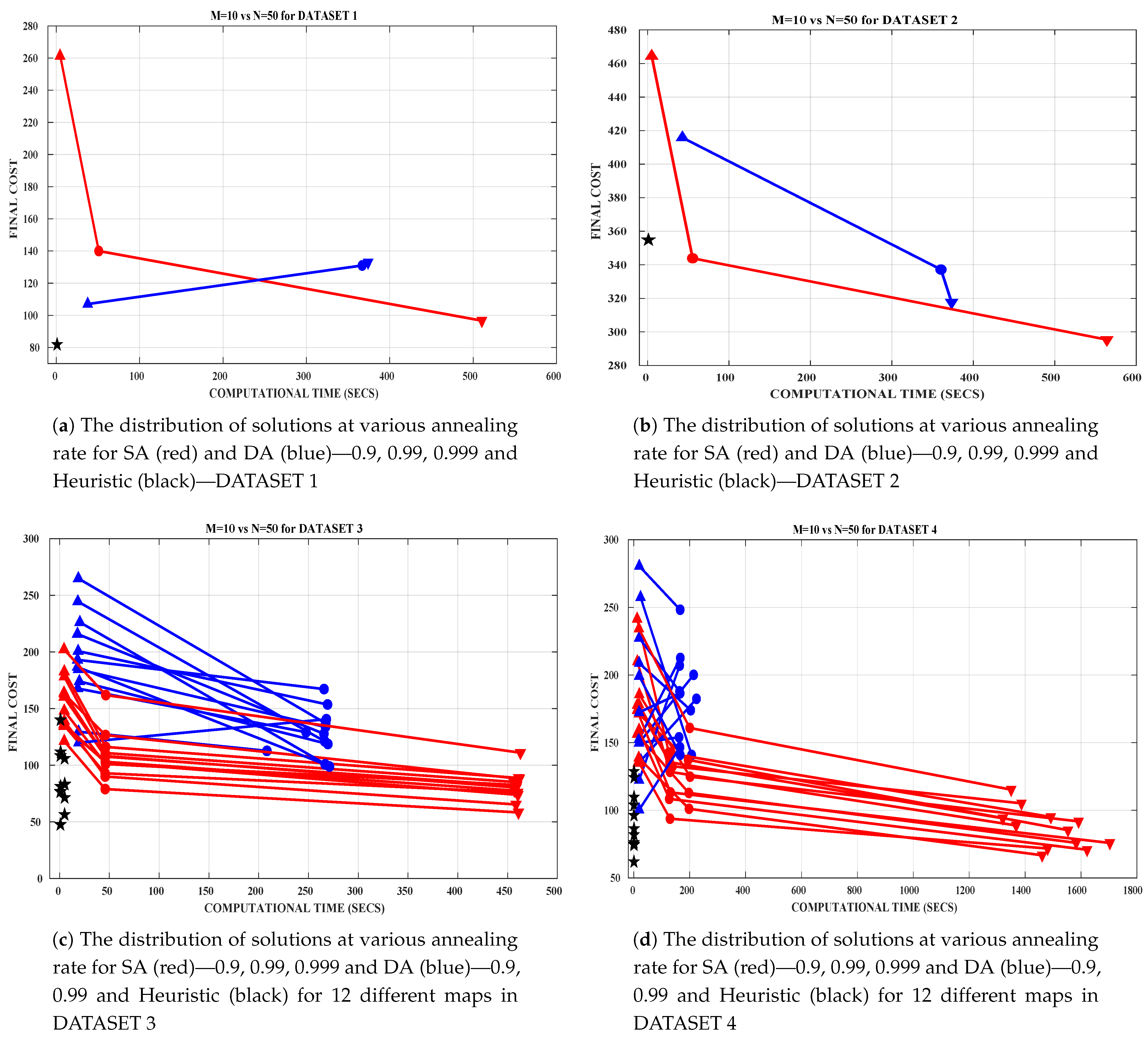
6.2. Scalability Comparison—Optimality and Computing Time
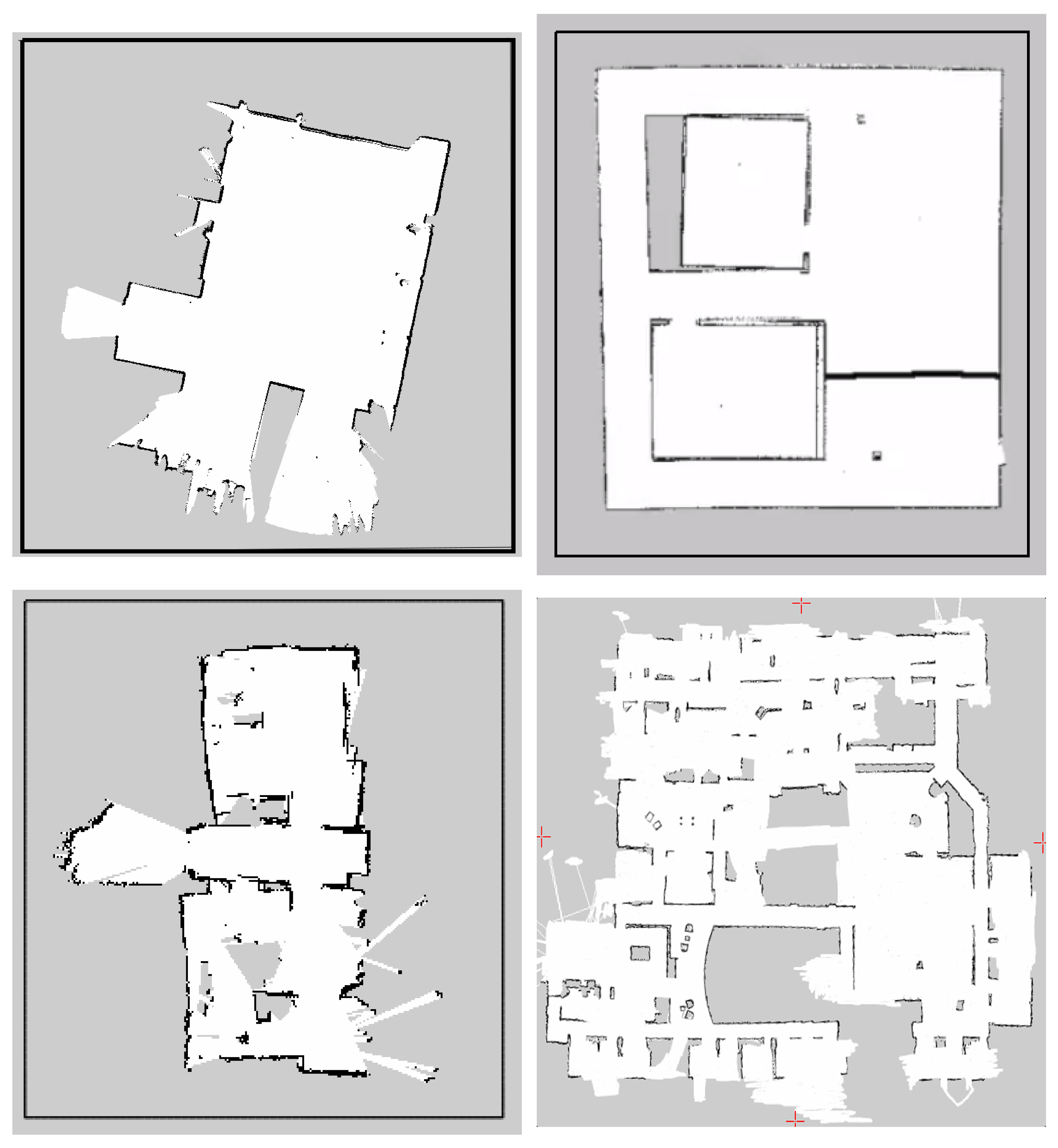
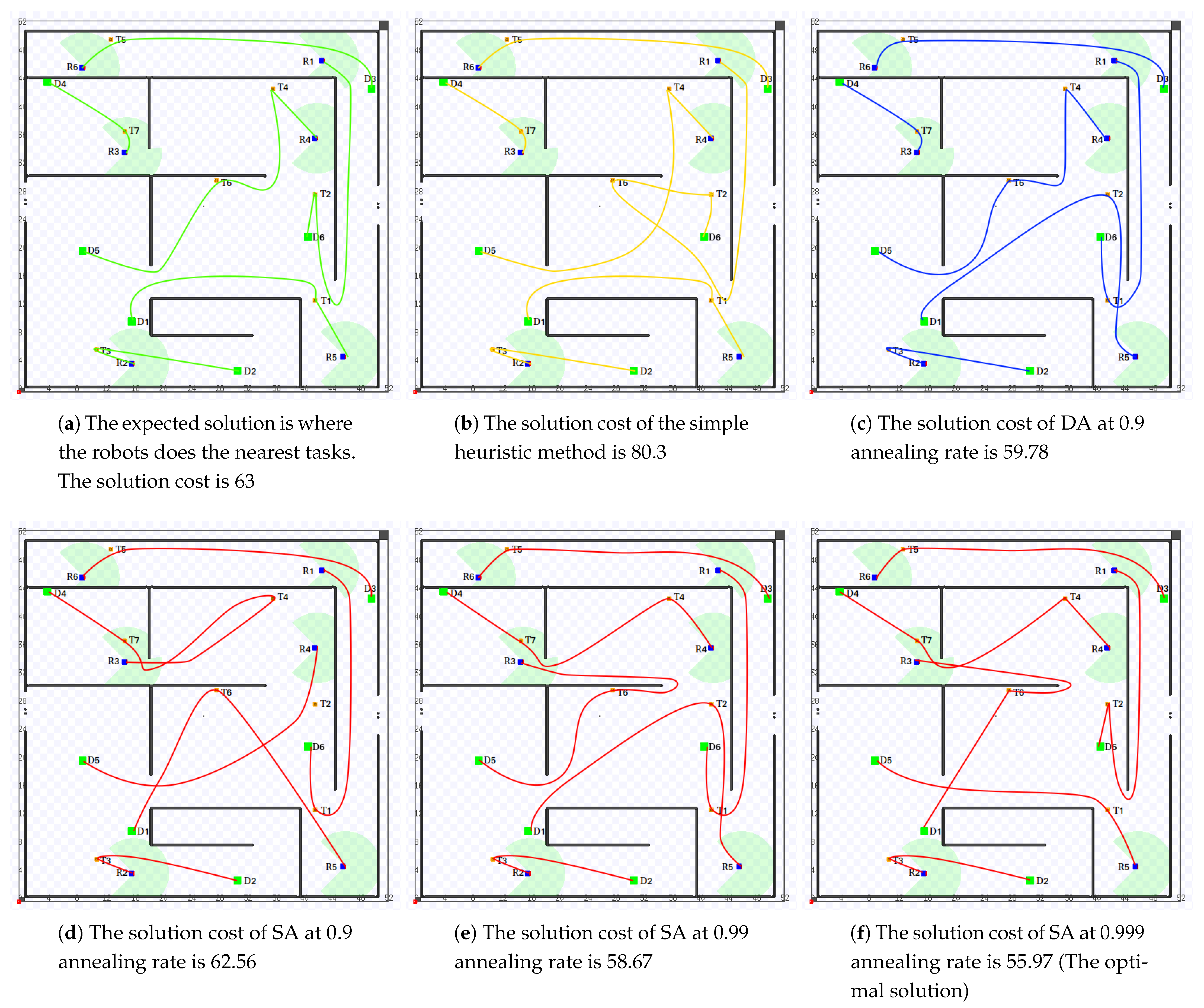
6.3. Motion Execution
6.4. Algorithmic Efficiency and Completeness
Solution Space
7. Discussion
7.1. Distributed Variant
7.2. Other Variants
7.2.1. The Delta Matrices
7.2.2. Precedence Constraints
7.2.3. Identical Utility Cost
7.2.4. Linear Assignment Problem
7.2.5. Capacity Constraints
8. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Acknowledgments
Conflicts of Interest
References
- Claes, D.; Oliehoek, F.; Baier, H.; Tuyls, K. Decentralised online planning for multi-robot warehouse commissioning. In Proceedings of the 16th Conference on Autonomous Agents and MultiAgent Systems, International Foundation for Autonomous Agents and Multiagent Systems, São Paulo, Brazil, 8–12 May 2017; pp. 492–500. [Google Scholar]
- Baxter, J.L.; Burke, E.; Garibaldi, J.M.; Norman, M. Multi-robot search and rescue: A potential field based approach. In Autonomous Robots and Agents; Springer: Berlin/Heidelberg, Germany, 2007; pp. 9–16. [Google Scholar]
- Burgard, W.; Moors, M.; Stachniss, C.; Schneider, F.E. Coordinated multi-robot exploration. IEEE Trans. Robot. 2005, 21, 376–386. [Google Scholar] [CrossRef] [Green Version]
- Fox, D.; Ko, J.; Konolige, K.; Limketkai, B.; Schulz, D.; Stewart, B. Distributed multirobot exploration and mapping. Proc. IEEE 2006, 94, 1325–1339. [Google Scholar] [CrossRef]
- Groth, C.; Henrich, D. Single-shot learning and scheduled execution of behaviors for a robotic manipulator. In Proceedings of the ISR/Robotik 2014, 41st International Symposium on Robotics, Munich, Germany, 2–3 June 2014; pp. 1–6. [Google Scholar]
- Lemaire, T.; Alami, R.; Lacroix, S. A distributed tasks allocation scheme in multi-UAV context. In Proceedings of the IEEE International Conference on Robotics and Automation, New Orleans, LA, USA, 26 April–1 May 2004; Volume 4, pp. 3622–3627. [Google Scholar]
- Gini, M. Multi-robot allocation of tasks with temporal and ordering constraints. In Proceedings of the Thirty-First AAAI Conference on Artificial Intelligence, San Francisco, CA, USA, 4–9 February 2017. [Google Scholar]
- Zhang, Y.; Parker, L.E. Multi-robot task scheduling. In Proceedings of the 2013 IEEE International Conference on Robotics and Automation, Karlsruhe, Germany, 6–10 May 2013; pp. 2992–2998. [Google Scholar]
- Parker, J.; Nunes, E.; Godoy, J.; Gini, M. Exploiting spatial locality and heterogeneity of agents for search and rescue teamwork. J. Field Robot. 2016, 33, 877–900. [Google Scholar] [CrossRef]
- Bektas, T. The multiple traveling salesman problem: An overview of formulations and solution procedures. Omega 2006, 34, 209–219. [Google Scholar] [CrossRef]
- McIntire, M.; Nunes, E.; Gini, M. Iterated multi-robot auctions for precedence-constrained task scheduling. In Proceedings of the 2016 International Conference on Autonomous Agents & Multiagent Systems. International Foundation for Autonomous Agents and Multiagent Systems, Singapore, 9–13 May 2016; pp. 1078–1086. [Google Scholar]
- Sarkar, C.; Paul, H.S.; Pal, A. A scalable multi-robot task allocation algorithm. In Proceedings of the 2018 IEEE International Conference on Robotics and Automation ICRA, Brisbane, QLD, Australia, 21–25 May 2018; pp. 1–9. [Google Scholar]
- Gombolay, M.; Wilcox, R.; Shah, J. Fast Scheduling of Multi-Robot Teams with Temporospatial Constraints. In Proceedings of the Robotics: Science and Systems IX, Berlin, Germany, 24–28 June 2013. [Google Scholar]
- Clausen, J. Branch and Bound Algorithms-Principles and Examples; Department of Computer Science, University of Copenhagen: Copenhagen, Denmark, 1999. [Google Scholar]
- Liu, C.; Kroll, A. A centralized multi-robot task allocation for industrial plant inspection by using a* and genetic algorithms. In Proceedings of the International Conference on Artificial Intelligence and Soft Computing, Zakopane, Poland, 29 April–3 May 2012; pp. 466–474. [Google Scholar]
- Wang, J.; Gu, Y.; Li, X. Multi-robot task allocation based on ant colony algorithm. J. Comput. 2012, 7, 2160–2167. [Google Scholar] [CrossRef]
- Li, X.; Ma, H.x. Particle swarm optimization based multi-robot task allocation using wireless sensor network. In Proceedings of the 2008 International Conference on Information and Automation, Changsha, China, 20–23 June 2008; pp. 1300–1303. [Google Scholar]
- Mosteo, A.R.; Montano, L. Simulated annealing for multi-robot hierarchical task allocation with flexible constraints and objective functions. In Proceedings of the Workshop on Network Robot Systems: Toward Intelligent Robotic Systems Integrated with Environments, IROS, Beijing, China, 9–15 October 2006. [Google Scholar]
- Mitiche, H.; Boughaci, D.; Gini, M. Efficient heuristics for a time-extended multi-robot task allocation problem. In Proceedings of the 2015 First International Conference on New Technologies of Information and Communication (NTIC), Mila, Algeria, 8–9 November 2015; pp. 1–6. [Google Scholar]
- Maheswaran, R.T.; Tambe, M.; Bowring, E.; Pearce, J.P.; Varakantham, P. Taking DCOP to the real world: Efficient complete solutions for distributed multi-event scheduling. In Proceedings of the Third International Joint Conference on Autonomous Agents and Multiagent Systems, New York, NY, USA, 23–23 July 2004; pp. 310–317. [Google Scholar]
- Lagoudakis, M.G.; Markakis, E.; Kempe, D.; Keskinocak, P.; Kleywegt, A.J.; Koenig, S.; Tovey, C.A.; Meyerson, A.; Jain, S. Auction-Based Multi-Robot Routing. Robot. Sci. Syst. 2005, 5, 343–350. [Google Scholar]
- Liu, L.; Shell, D.A.; Michael, N. From selfish auctioning to incentivized marketing. Auton. Robot. 2014, 37, 417–430. [Google Scholar] [CrossRef]
- Ma, H.; Koenig, S. Optimal target assignment and path finding for teams of agents. arXiv 2016, arXiv:1612.05693. [Google Scholar]
- Ng, W.; Mak, K.; Zhang, Y. Scheduling trucks in container terminals using a genetic algorithm. Eng. Optim. 2007, 39, 33–47. [Google Scholar] [CrossRef]
- Parker, L.E. L-ALLIANCE: A Mechanism for Adaptive Action Selection in Heterogeneous Multi-Robot Teams; Technical Report; Oak Ridge National Lab.: Oak Ridge, TN, USA, 1995.
- Turpin, M.; Michael, N.; Kumar, V. An approximation algorithm for time optimal multi-robot routing. In Algorithmic Foundations of Robotics XI; Springer: Berlin/Heidelberg, Germany, 2015; pp. 627–640. [Google Scholar]
- Franca, P.M.; Gendreau, M.; Laporte, G.; Muller, F.M. The m-Traveling Salesman Problem with Minmax Objective. Transp. Sci. JSTOR 1995, 29, 267–275. [Google Scholar] [CrossRef]
- Kato, S.; Nishiyama, S.; Takeno, J. Coordinating Mobile Robots By Applying Traffic Rules. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Raleigh, NC, USA, 7–10 July 1992; Volume 3, pp. 1535–1541. [Google Scholar] [CrossRef]
- Van Den Berg, J.P.; Overmars, M.H. Prioritized motion planning for multiple robots. In Proceedings of the 2005 IEEE/RSJ International Conference on Intelligent Robots and Systems ICRA 2005, Edmonton, AB, Canada, 2–6 August 2005; pp. 430–435. [Google Scholar]
- Liu, M.; Ma, H.; Li, J.; Koenig, S. Task and path planning for multi-agent pickup and delivery. In Proceedings of the International Joint Conference on Autonomous Agents and Multiagent Systems (AAMAS), Montreal, QC, Canada, 13–17 May 2019. [Google Scholar]
- Gerkey, B.P.; Matarić, M.J. A formal analysis and taxonomy of task allocation in multi-robot systems. Int. J. Robot. Res. 2004, 23, 939–954. [Google Scholar] [CrossRef] [Green Version]
- Korsah, G.A.; Stentz, A.; Dias, M.B. A comprehensive taxonomy for multi-robot task allocation. Int. J. Robot. Res. 2013, 32, 1495–1512. [Google Scholar] [CrossRef]
- Nunes, E.; Manner, M.; Mitiche, H.; Gini, M. A taxonomy for task allocation problems with temporal and ordering constraints. Robot. Auton. Syst. 2017, 90, 55–70. [Google Scholar] [CrossRef] [Green Version]
- Gerkey, B.P.; Mataric, M.J. Multi-robot task allocation: Analyzing the complexity and optimality of key architectures. In Proceedings of the 2003 IEEE International Conference on Robotics and Automation, Taipei, Taiwan, 14–19 September 2003; Volume 3, pp. 3862–3868. [Google Scholar]
- Brucker, P. Scheduling Algorithms; Springer: Berlin/Heidelberg, Germany, 2004. [Google Scholar]
- Parker, L.E. ALLIANCE: An architecture for fault tolerant multirobot cooperation. IEEE Trans. Robot. Autom. 1998, 14, 220–240. [Google Scholar] [CrossRef] [Green Version]
- Garey, M.R.; Johnson, D.S. Computers and Intractability: A Guide to the Theory of NP-Completeness (Series of Books in the Mathematical Sciences); W. H. Freeman: San Francisco, CA, USA, 1979. [Google Scholar]
- Arkin, E.M.; Hassin, R.; Levin, A. Approximations for Minimum and Min–Max Vehicle Routing Problems. J. Algorithms 2006, 59, 1–18. [Google Scholar] [CrossRef]
- Diaby, M. Linear programming formulation of the multi-depot multiple traveling salesman problem with differentiated travel costs. Travel. Salesm. Probl. Theory Appl. 2010, 2010, 257–282. [Google Scholar]
- Oberlin, P.; Rathinam, S.; Darbha, S. A transformation for a heterogeneous, multiple depot, multiple traveling salesman problem. In Proceedings of the 2009 American Control Conference, St. Louis, MO, USA, 10–12 June 2009; pp. 1292–1297. [Google Scholar]
- Naccache, S.; Côté, J.F.; Coelho, L.C. The multi-pickup and delivery problem with time windows. Eur. J. Oper. Res. 2018, 269, 353–362. [Google Scholar] [CrossRef]
- Carlsson, J.; Ge, D.; Subramaniam, A. Solving min–max multi-depot vehicle routing problem. Lect. Glob. Optim. 2009, 55, 31–46. [Google Scholar]
- Bish, E.K.; Chen, F.Y.; Leong, Y.T.; Nelson, B.L.; Ng, J.W.C.; Simchi-Levi, D. Dispatching vehicles in a mega container terminal. In Container Terminals and Cargo Systems; Springer: Berlin/Heidelberg, Germany, 2007; pp. 179–194. [Google Scholar]
- Xu, Z.; Xu, D.; Zhu, W. Approximation results for a min–max location-routing problem. Discret. Appl. Math. 2012, 160, 306–320. [Google Scholar] [CrossRef] [Green Version]
- Nace, D.; Pióro, M. Max-min fairness and its applications to routing and load-balancing in communication networks: A tutorial. IEEE Commun. Surv. Tutor. 2008, 10, 5–17. [Google Scholar] [CrossRef]
- Applegate, D.; Cook, W.; Dash, S.; Rohe, A. Solution of a min–max vehicle routing problem. INFORMS J. Comput. 2002, 14, 132–143. [Google Scholar] [CrossRef] [Green Version]
- Pěnička, R.; Faigl, J.; Váňa, P.; Saska, M. Dubins orienteering problem. IEEE Robot. Autom. Lett. 2017, 2, 1210–1217. [Google Scholar] [CrossRef]
- Xu, Z.; Rodrigues, B. A 3/2-approximation algorithm for multiple depot multiple traveling salesman problem. In Proceedings of the Scandinavian Workshop on Algorithm Theory, Bergen, Norway, 21–23 June 2010; pp. 127–138. [Google Scholar]
- Even, G.; Garg, N.; Könemann, J.; Ravi, R.; Sinha, A. Min–max tree covers of graphs. Oper. Res. Lett. 2004, 32, 309–315. [Google Scholar] [CrossRef]
- Christofides, N.; Korman, S. Note—A computational survey of methods for the set covering problem. Manag. Sci. 1975, 21, 591–599. [Google Scholar] [CrossRef] [Green Version]
- Fisher, M.L.; Jaikumar, R. A generalized assignment heuristic for vehicle routing. Networks 1981, 11, 109–124. [Google Scholar] [CrossRef]
- Turner, J.S. Approximation algorithms for the shortest common superstring problem. Inf. Comput. 1989, 83, 1–20. [Google Scholar] [CrossRef] [Green Version]
- Cordeau, J.F.; Laporte, G. The dial-a-ride problem: Models and algorithms. Ann. Oper. Res. 2007, 153, 29–46. [Google Scholar] [CrossRef]
- Luo, L.; Chakraborty, N.; Sycara, K. A distributed algorithm for constrained multi-robot task assignment for grouped tasks. J. Contrib. 2018. [Google Scholar] [CrossRef]
- Faigl, J.; Váňa, P.; Pěnička, R.; Saska, M. Unsupervised learning-based flexible framework for surveillance planning with aerial vehicles. J. Field Robot. 2019, 36, 270–301. [Google Scholar] [CrossRef] [Green Version]
- Mohamed Bin Zayed International Robotics Challenge (MBZIRC) 2017. Available online: http://www.mbzirc.com (accessed on 9 November 2021).
- Kuhn, H.W. The Hungarian method for the assignment problem. Nav. Res. Logist. Q. 1995, 2, 83–97. [Google Scholar] [CrossRef] [Green Version]
- Burkard, R.E.; Cela, E. Linear assignment problems and extensions. In Handbook of Combinatorial Optimization; Springer: Berlin/Heidelberg, Germany, 1999; pp. 75–149. [Google Scholar]
- Hakkinen, J.; Lagerholm, M.; Peterson, C.; Soderberg, B. Local routing algorithms based on Potts neural networks. IEEE Trans. Neural Netw. 2000, 11, 970–977. [Google Scholar] [CrossRef] [Green Version]
- Soderberg, B.; Jonsson, H. Deterministic annealing and nonlinear assignment. arXiv 2001, arXiv:cond-mat/0105321. [Google Scholar]
- Kirkpatrick, S.; Gelatt, C.D.; Vecchi, M.P. Optimization by simulated annealing. Science 1983, 220, 671–680. [Google Scholar] [CrossRef] [PubMed]
- Ohlsson, M.; Peterson, C.; Söderberg, B. Neural networks for optimization problems with inequality constraints: The knapsack problem. Neural Comput. 1993, 5, 331–339. [Google Scholar] [CrossRef]
- Sinkhorn, R.; Knopp, P. Concerning nonnegative matrices and doubly stochastic matrices. Pac. J. Math. 1967, 21, 343–348. [Google Scholar] [CrossRef]
- Grisetti, G.; Stachniss, C.; Burgard, W. Improved techniques for grid mapping with rao-blackwellized particle filters. IEEE Trans. Robot. 2007, 23, 34–46. [Google Scholar] [CrossRef] [Green Version]
- Hart, P.E.; Nilsson, N.J.; Raphael, B. A formal basis for the heuristic determination of minimum cost paths. IEEE Trans. Syst. Sci. Cybern. 1968, 4, 100–107. [Google Scholar] [CrossRef]
- Liu, L.; Shell, D.A. An anytime assignment algorithm: From local task swapping to global optimality. Auton. Robot. 2013, 35, 271–286. [Google Scholar] [CrossRef]




 .
.
 .
.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| M | N | Effective Matrix Size | No. of Possible Matrices | No. of Valid Matrices |
|---|---|---|---|---|
| 1 | 2 | 3 × 3 | 4 | 2 |
| 1 | 3 | 4 × 4 | 18 | 6 |
| 2 | 2 | 4 × 4 | 4 | 4 |
| 2 | 3 | 5 × 5 | 36 | 24 |
| 2 | 4 | 6 × 6 | 288 | 144 |
| 2 | 5 | 7 × 7 | 2400 | 960 |
| 3 | 3 | 6 × 6 | 36 | 36 |
| 3 | 4 | 7 × 7 | 576 | 432 |
| 4 | 5 | 9 × 9 | 14,400 | 11,520 |
| 5 | 6 | 11 × 11 | 518,400 | 432,000 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
David, J.; Rögnvaldsson, T. Multi-Robot Routing Problem with Min–Max Objective. Robotics 2021, 10, 122. https://doi.org/10.3390/robotics10040122
David J, Rögnvaldsson T. Multi-Robot Routing Problem with Min–Max Objective. Robotics. 2021; 10(4):122. https://doi.org/10.3390/robotics10040122
Chicago/Turabian StyleDavid, Jennifer, and Thorsteinn Rögnvaldsson. 2021. "Multi-Robot Routing Problem with Min–Max Objective" Robotics 10, no. 4: 122. https://doi.org/10.3390/robotics10040122
APA StyleDavid, J., & Rögnvaldsson, T. (2021). Multi-Robot Routing Problem with Min–Max Objective. Robotics, 10(4), 122. https://doi.org/10.3390/robotics10040122