
Wire Harness Assembly Process Supported by Collaborative Robots: Literature Review and Call for R&D



Abstract
:1. Introduction
2. Research Method
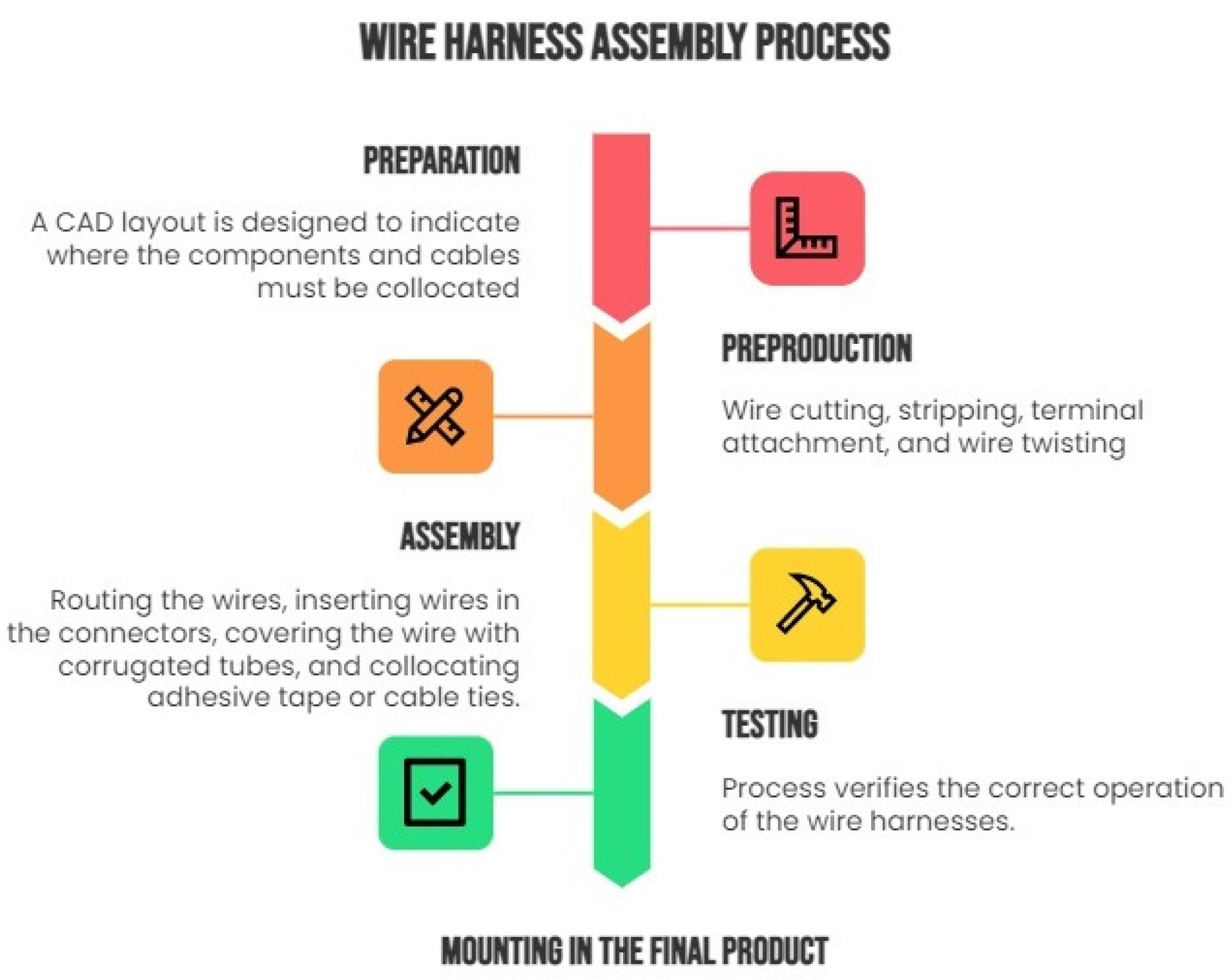
3. State-of-the-Art of the Wire Harness Assembly Process
3.1. Latest Advances in the Wire Harness Assembly Process Supported by Collaborative Robots
3.2. Recent Advances in the Wire Harness Assembly Process without the Support of Collaborative Robots
3.3. Newest Advances in Collaborative Robots in Industry
3.4. Tabular Summary of the State-of-the-Art
4. Main Findings and Discussion
4.1. Collaborative Robots and Their Grippers
4.2. Ergonomics
4.3. Computer Vision Systems
4.4. Implementation Methodologies
5. Further Research
5.1. Collaborative Robots and Their Grippers
5.2. Ergonomics
5.3. Computer Vision Systems
5.4. Implementation Methodologies
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Aguirre, E.; Ferreira, L.; Raucent, B. Robotic Assembly of Wire Harnesses: Economic and Technical Justification. J. Manuf. Syst. 1997, 16, 220–231. [Google Scholar] [CrossRef]
- Trommnau, J.; Kühnle, J.; Siegert, J.; Inderka, R.; Bauernhans, T. Overview of the State of the Art in the Production Process of Automotive Wire Harnesses, Current Research and Future Trends. Procedia CIRP 2019, 81, 387–392. [Google Scholar] [CrossRef]
- Gannon, M. Connector Tips. 2019. Available online: https://www.connectortips.com/making-connector-assembly-safer-and-more-efficient-with-workplace-ergonomics/ (accessed on 9 June 2022).
- Heisler, P.; Utsch, D.; Kuhn, M.; Franke, J. Optimization of Wire Harness Assembly using Human-Robot-Collaboration. Procedia CIRP 2020, 97, 260–265. [Google Scholar] [CrossRef]
- Rauch, E.; Linder, C.; Dallasega, P. Anthropocentric Perspective of Production before and within Industry 4.0. Comput. Ind. Eng. 2020, 139, 105644. [Google Scholar] [CrossRef]
- Dobra, Z.; Dhir, K.S. Technology Jump in the Industry: Human-Robot Cooperation in Production. Ind. Rob. 2020, 47, 757–775. [Google Scholar] [CrossRef]
- Ibáñez, V.R.; Pujol, F.; Ortega, S.G.; Perpiñán, J.S. Collaborative Robotics in Wire Harnesses Spot Taping Process. Comput. Ind. 2021, 125, 103370. [Google Scholar] [CrossRef]
- Mateus, J.C.; Claeys, D.; Limère, V.; Cottyn, J.; Aghezzaf, E.H. A Structured Methodology for the Design of a Human-Robot Collaborative Assembly Workplace. Int. J. Adv. Manuf. Technol. 2019, 102, 2663–2681. [Google Scholar] [CrossRef]
- Malik, A.A.; Bilberg, A. Collaborative Robots in Assembly: A Practical Approach for Tasks Distribution. Procedia CIRP 2019, 81, 665–670. [Google Scholar] [CrossRef]
- Faccio, M.; Bottin, M.; Rosati, G. Collaborative and Traditional Robotic Assembly: A Comparison Model. Int. J. Adv. Manuf. Technol. 2019, 102, 1355–1372. [Google Scholar] [CrossRef]
- Gualtieri, L.; Rauch, E.; Vidoni, R.; Matt, D.T. An Evaluation Methodology for the Conversion of Manual Assembly Systems into Human-Robot Collaborative Workcells. Procedia Manuf. 2019, 38, 358–366. [Google Scholar] [CrossRef]
- Petruck, H.; Faber, M.; Giese, H.; Geibel, H.; Mostert, S.; Usai, M.; Mertens, A.; Brandl, C. Human-Robot Collaboration in Manual Assembly—A Collaborative Workplace. In Advances in Intelligent Systems and Computing, Proceedings of the 20th Congress of the International Ergonomics Association (IEA 2018), Florence, Italy, 26–30 August 2018; Springer: Cham, Switzerland, 2018; Volume 825, pp. 21–28. [Google Scholar] [CrossRef]
- Tunstel, E.; Dani, A.; Martinez, C.; Blakeslee, B.; Mendoza, J.; Saltus, R.; Trombetta, D.; Rotithor, G.; Fuhlbrigge, T.; Lasko, D.; et al. Robotic Wire Pinning for Wire Harness Assembly Automation. In Proceedings of the 2020 IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM), Boston, MA, USA, 6–10 July 2020; pp. 1208–1215. [Google Scholar]
- Capitanelli, A.; Maratea, M.; Mastrogiovanni, F.; Vallati, M. On the Manipulation of Articulated Objects in Human-Robot Cooperation Scenarios. Rob. Auton. Syst. 2018, 109, 139–155. [Google Scholar] [CrossRef] [Green Version]
- Gualtieri, L.; Palomba, I.; Merati, F.A.; Rauch, E.; Vidoni, R. Design of Human-centered Collaborative Assembly Workstations for the Improvement of Operators’ Physical Ergonomics and Production Efficiency: A Case Study. Sustainability 2020, 12, 3606. [Google Scholar] [CrossRef]
- Realyvásquez-Vargas, A.; Arredondo-Soto, K.C.; García-Alcaraz, J.L.; Márquez-Lobato, B.Y.; Cruz-García, J. Introduction and Configuration of a Collaborative Robot in an Assembly Task as a means to Decrease Occupational Risks and Increase Efficiency in a Manufacturing Company. Robot. Comput. Integr. Manuf. 2019, 57, 315–328. [Google Scholar] [CrossRef]
- Yumbla, F.; Yi, J.S.; Abayebas, M.; Shafiyev, M.; Moon, H. Tolerance Dataset: Mating Process of Plug-in Cable Connectors for Wire Harness Assembly Tasks. Intell. Serv. Robot. 2020, 13, 159–168. [Google Scholar] [CrossRef]
- Yumbla, F.; Abayebas, M.; Yi, J.S.; Jeon, J.; Moon, H. Reposition and Alignment of Cable Connectors using a Vibration Plate Manipulator for Wire Harness Assembly Tasks. Int. J. Precis. Eng. Manuf. 2021, 22, 649–657. [Google Scholar] [CrossRef]
- Nguyen, T.P.; Yoon, J. A Novel Vision-based Method for 3D Profile Extraction of Wire harness in Robotized Assembly Process. J. Manuf. Syst. 2021, 61, 365–374. [Google Scholar] [CrossRef]
- Kicki, P.; Bednarek, M.; Lembicz, P.; Mierzwiak, G.; Szymko, A.; Kraft, M.; Walas, K. Tell Me, What Do You See?—Interpretable Classification of Wiring Harness Branches with Deep Neural Network. Sensors 2021, 21, 4327. [Google Scholar] [CrossRef]
- Yumbla, F.; Abeyabas, M.; Luong, T.; Yi, J.S.; Moon, H. Preliminary Connector Recognition System based on Image Processing for Wire Harness Assembly Tasks. In Proceedings of the 20th International Conference on Control, Automation and Systems (ICCAS), Busan, Korea, 13–16 October 2020; pp. 1146–1150. [Google Scholar] [CrossRef]
- Heisler, P.; Steinmetz, P.; Yoo, I.S.; Franke, J. Automatization of the Cable-Routing-Process within the Automated Production of Wiring Systems. Appl. Mech. Mater. 2017, 871, 186–192. [Google Scholar] [CrossRef]
- Lv, N.; Liu, J.; Ding, X.; Lin, H. Assembly Simulation of Multi-Branch Cables. J. Manuf. Syst. 2017, 45, 201–211. [Google Scholar] [CrossRef]
- Ruppert, T.; Abonyi, J. Software Sensor for Activity-Time Monitoring and Fault Detection in Production Lines. Sensors 2018, 18, 2346. [Google Scholar] [CrossRef] [Green Version]
- Sugiono, S.; Efranto, R.Y.; Budiprasetya, A.R. Reducing Musculoskeletal Disorder (MSD) Risk of Wiring Harness Workstation using Workplace Ergonomic Risk Assessment (WERA) Method. Sci. Rev. Eng. Environ. Sci. 2018, 27, 536–551. [Google Scholar] [CrossRef]
- Sánchez Restrepo, S.; Raiola, G.; Guerry, J.; D’Elia, E.; Lamy, X.; Sidobre, D. Toward an Intuitive and Iterative 6D Virtual Guide Programming Framework for Assisted Human-Robot Comanipulation. Robotica 2020, 38, 1778–1806. [Google Scholar] [CrossRef]
- Karaulova, T.; Andronnikov, K.; Mahmood, K.; Shevtshenko, E. Lean Automation for Low-Volume Manufacturing Environment. In Proceedings of the 30th International DAAAM Symposium “Intelligent Manufacturing & Automation”, Zadar, Croatia, 23–26 October 2019; Volume 30, pp. 59–68. [Google Scholar] [CrossRef]
- Girbes-Juan, V.; Schettino, V.; Demiris, Y.; Tornero, J. Haptic and Visual Feedback Assistance for Dual-Arm Robot Teleoperation in Surface Conditioning Tasks. IEEE Trans. Haptics 2021, 14, 44–56. [Google Scholar] [CrossRef] [PubMed]
- Schmitt, J.; Hillenbrand, A.; Kranz, P.; Kaupp, T. Assisted Human-Robot-Interaction for Industrial Assembly: Application of Spatial Augmented Reality (SAR) for Collaborative Assembly Tasks. In Proceedings of the 2021 ACM/IEEE International Conference on Human-Robot Interaction, Boulder, CO, USA, 8–11 March 2021; pp. 52–56. [Google Scholar] [CrossRef]
- Malik, A.A.; Bilberg, A. Complexity-based Task Allocation in Human-Robot Collaborative Assembly. Ind. Rob. 2019, 46, 471–480. [Google Scholar] [CrossRef]
- Castro, P.R.; Högberg, D.; Ramsen, H.; Bjursten, J.; Hanson, L. Virtual Simulation of Human-Robot Collaboration Workstations. Adv. Intell. Syst. Comput. 2019, 822, 250–261. [Google Scholar] [CrossRef]
- Terrile, S.; Argüelles, M.; Barrientos, A. Comparison of Different Technologies for Soft Robotics Grippers. Sensors 2021, 21, 3253. [Google Scholar] [CrossRef]


{kind=link}
| Author(s) | Categories | Contribution | |
|---|---|---|---|
| State-of-the-Art | Topics of Interest | ||
| Heisler et al. [4] | SCR | CR | This paper presents an automation process that could be adapted for the assembly of wire harnesses. |
| Yumbla et al. [17] | SCR | CR | This paper offers a database of different tolerances of connectors used in wire harnesses. |
| Tunstel et al. [13] | SCR | CR | This paper presents a solution for the attachment of cables in the wire harnesses assembling process. |
| Yumbla et al. [18] | SCR | CR | This paper provides a solution for the alignment and manipulation of wire harnesses through vibrating plates. |
| Nguyen and Yoon [19] | SCR | CR and CV | This paper offers a solution for identifying the profile of a wire using a computer vision system for its later use in conjunction with a cobot in wire harnesses assembly procedures. |
| Kicki et al. [20] | SCR | CV | This paper presents a computer vision system and a neural network for identifying different types of wire harnesses for its later use as a navigation guide for a cobot. |
| Yumbla et al. [21] | SCR | CV | This paper proposes a computer vision system for the recognition of wire harness terminals. |
| Trommnau et al. [2] | SCR | CR | This paper reviews the state-of-the-art in wire harness assembly processes. |
| Heisler et al. [22] | SCR | CR | This paper presents an automation solution using a cobot for the routing task in a wire harness assembly process. |
| Román Ibáñez et al. [7] | SCR | CR | This paper proposes an automation solution using a cobot for the spot tapping task in a wire harness assembly process. |
| Gualtieri et al. [15] | SCR | CR and ER | This paper addresses the conversion of a manual workstation to a collaborative one for the wire harness assembly process’s spot tapping task. |
| Naijing et al. [23] | WCR | CR | This paper proposes a simulation model of a wire harness based on its physical properties by considering its topologies and anatomical characteristics. |
| Ruppert and Abonyi [24] | WCR | IM | This paper presents an alerting system using fixture sensors to notify when the productivity in a wire harness assembly process has been reduced. |
| Sugiono et al. [25] | WCR | ER | This paper evaluates the ergonomic conditions of workers in a wire harness assembly process using the WERA methodology. |
| Sánchez Restrepo et al. [26] | CRI | IM | This paper proposes an intuitively virtual guide for the easy programming of a robot without the need for an expert/expertise. |
| Karaulova et al. [27] | CRI | CR | This paper analyses the advantages that the integration of a cobot into an assembly process can offer in terms of flexibility and variability handling. |
| Capitanelli et al. [14] | CRI | CR | This paper details the difficulties that cobots can have when working with flexible materials and what solutions can be developed to handle these materials. |
| Mateus et al. [8] | CRI | IM | This paper presents a methodology to integrate a cobot in a sequential assembly process. |
| Malik and Bilberg [9] | CRI | CR | This paper develops a methodology that allows assigning the tasks that must be carried out by both a cobot and a human in a collaborative assembly process by optimizing for the best possible assembly sequence. |
| Gualtieri et al. [11] | CRI | IM | This paper provides a methodology for evaluating the transformation of a workstation from a manual to a collaborative semi-automated one. |
| Girbes-Juan et al. [28] | CRI | IM | This paper develops a teleoperation architecture for a cobot, which is responsible for conducting surface conditioning tasks. |
| Schmitt et al. [29] | CRI | IM | This paper offers a methodology for the design of a collaborative workstation focusing on its user acceptance. |
| Malik and Bilderberg [30] | CRI | IM | This paper develops a methodology for modifying a generic manual assembly task to a collaborative one. |
| Castro et al. [31] | CRI | IM | This paper offers a simulation model to design collaborative workstations optimizing for efficiency. |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Navas-Reascos, G.E.; Romero, D.; Stahre, J.; Caballero-Ruiz, A. Wire Harness Assembly Process Supported by Collaborative Robots: Literature Review and Call for R&D. Robotics 2022, 11, 65. https://doi.org/10.3390/robotics11030065
Navas-Reascos GE, Romero D, Stahre J, Caballero-Ruiz A. Wire Harness Assembly Process Supported by Collaborative Robots: Literature Review and Call for R&D. Robotics. 2022; 11(3):65. https://doi.org/10.3390/robotics11030065
Chicago/Turabian StyleNavas-Reascos, Gabriel E., David Romero, Johan Stahre, and Alberto Caballero-Ruiz. 2022. "Wire Harness Assembly Process Supported by Collaborative Robots: Literature Review and Call for R&D" Robotics 11, no. 3: 65. https://doi.org/10.3390/robotics11030065
APA StyleNavas-Reascos, G. E., Romero, D., Stahre, J., & Caballero-Ruiz, A. (2022). Wire Harness Assembly Process Supported by Collaborative Robots: Literature Review and Call for R&D. Robotics, 11(3), 65. https://doi.org/10.3390/robotics11030065