
A Fast and Close-to-Optimal Receding Horizon Control for Trajectory Generation in Dynamic Environments



Abstract
:1. Introduction
- We extend the TC-SAC method to cover the cases where target constraints might be violated;
- Different comparisons between TC-SAC, SAC, and indirect optimal control methods are given to show the improvement of the proposed method;
- We show that TC-SAC is able to deal with dynamic environments, which involves avoiding obstacles in our case, and can be applied in different systems without lots of modifications;
- The stability proof of the proposed method is given and discussed.
2. Materials and Methods
2.1. Problem Formulation
2.2. Target-Constrained Sequential Action Control
- A nominal controller based on the first-order gradient algorithm (FOGA) [45];
- An optimal controller based on Sequential Action Control (SAC).
2.2.1. First-Order Gradient Algorithm (FOGA)
2.2.2. Sequential Action Control
2.2.3. Extended Sequential Action Control with Target Constraints
| Algorithm 1: TC-SAC. |
| Initialize , , current time , prediction horizon , sampling time , end time , initial guess for nominal control . |
3. Results
3.1. Reaching Motion Task
3.1.1. Upright as Desired Position
3.1.2. Arbitrary Position
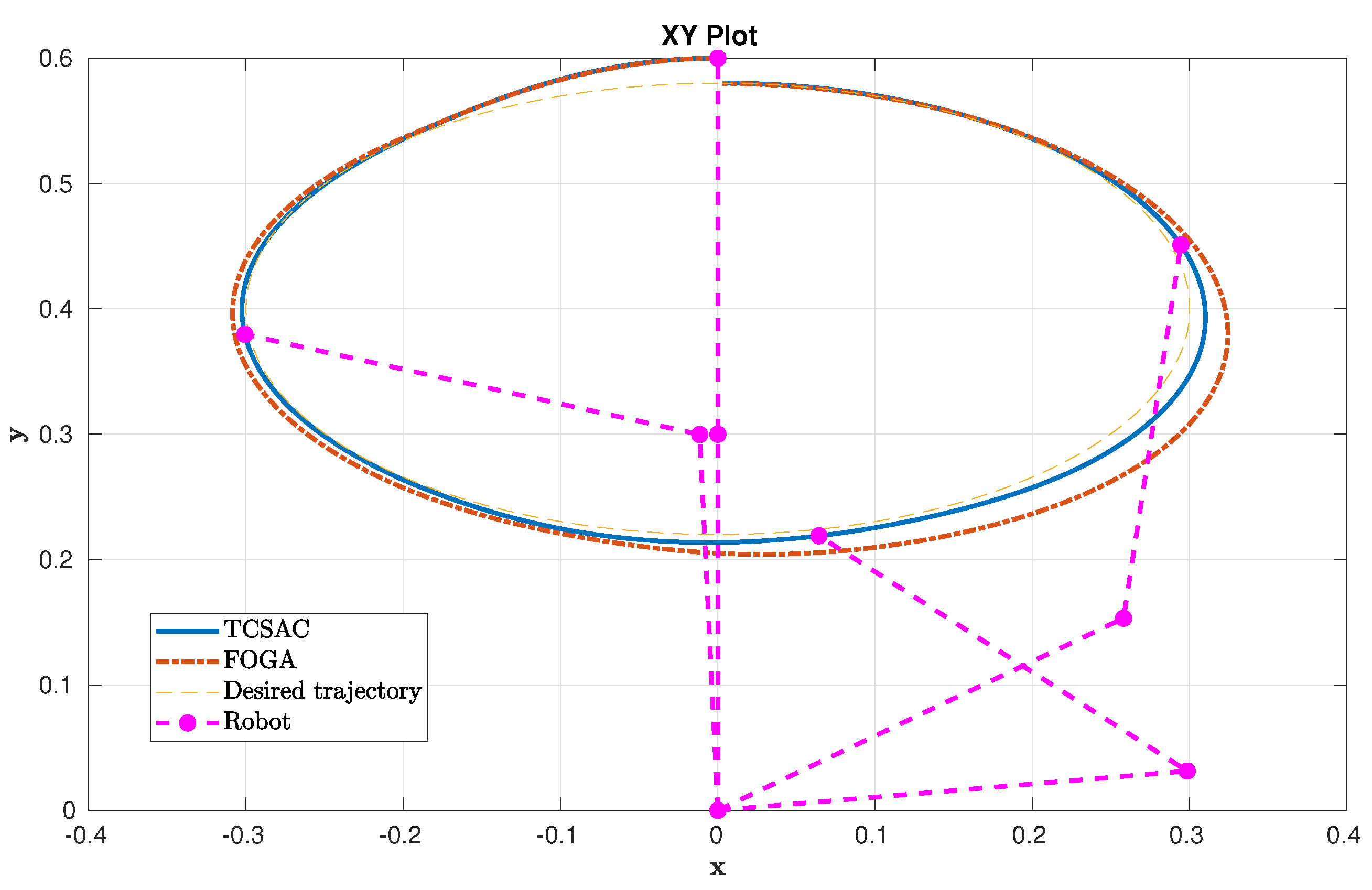
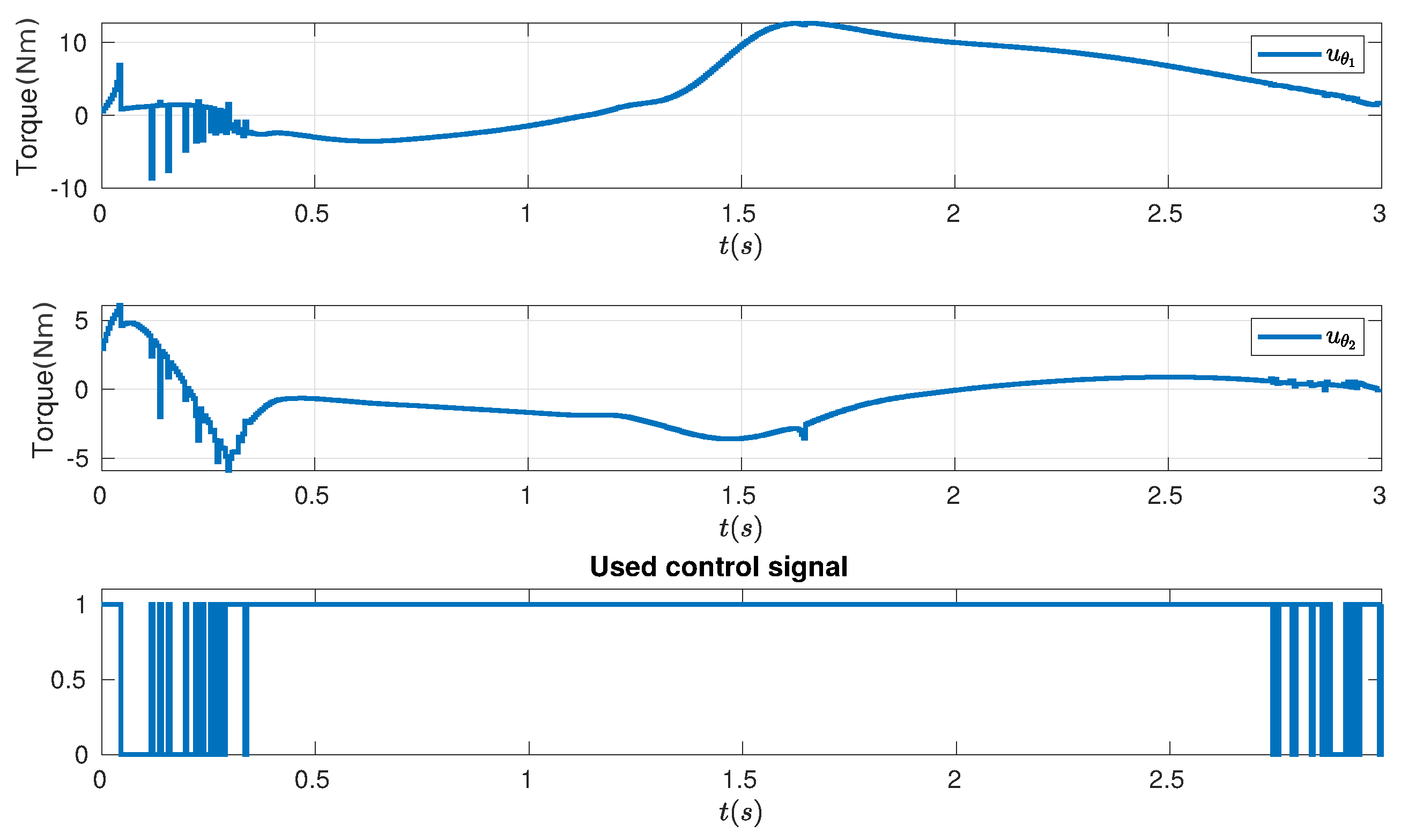
3.2. Tracking an Ellipse Trajectory
3.3. Trajectory Tracking in Dynamic Environment of a Car-Like System
4. Stability Analysis
- is twice continuously differentiable and —thus, is an equilibrium of the system;
- system (39) has a unique solution for any initial condition and any piecewise continuous .
4.1. Stability of FOGA
- (a)
- and for ;
- (b)
- when ;
- (c)
- exists for any .
- At any time t, if , meaning that the system reaches the origin, employ . Else:
- At any time :
- Obtain an admissible control as an initial guess
- Compute an admissible control horizon that is better than the preceding control horizon in the sense that
- Apply the control to the real system over the interval
4.2. Stability of TC-SAC
5. Discussion and Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| TC-SAC | Target-Constrained Sequential Action Control |
| SAC | Sequential Action Control |
| NMPC | Nonlinear Model Predictive Control |
| MPC | Model Predictive Control |
| OCP | Optimal Control Problem |
| ODE | Ordinary Differential Equation |
| FOGA | First-Order Gradient Algorithm |
| DOF | Degree of Freedom |
Appendix A. Vehicle Dynamic Model
Appendix B. Proof of Theorem 1
References
- González, D.; Pérez, J.; Milanés, V.; Nashashibi, F. A Review of Motion Planning Techniques for Automated Vehicles. IEEE Trans. Intell. Transp. Syst. 2016, 17, 1135–1145. [Google Scholar] [CrossRef]
- Paden, B.; Čáp, M.; Yong, S.Z.; Yershov, D.; Frazzoli, E. A Survey of Motion Planning and Control Techniques for Self-Driving Urban Vehicles. IEEE Trans. Intell. Veh. 2016, 1, 33–55. [Google Scholar] [CrossRef] [Green Version]
- Katrakazas, C.; Quddus, M.; Chen, W.H.; Deka, L. Real-time motion planning methods for autonomous on-road driving: State-of-the-art and future research directions. Transp. Res. Part Emerg. Technol. 2015, 60, 416–442. [Google Scholar] [CrossRef]
- Behringer, R.; Muller, N. Autonomous road vehicle guidance from autobahnen to narrow curves. IEEE Trans. Robot. Autom. 1998, 14, 810–815. [Google Scholar] [CrossRef]
- Piazzi, A.; Bianco, C.G.L.; Bertozzi, M.; Fascioli, A.; Broggi, A. Quintic G2-splines for the iterative steering of vision-based autonomous vehicles. IEEE Trans. Intell. Transp. Syst. 2002, 3, 27–36. [Google Scholar] [CrossRef]
- Kelly, A.; Stentz, A.; Amidi, O.; Bode, M.; Bradley, D.; Diaz-Calderon, A.; Happold, M.; Herman, H.; Mandelbaum, R.; Pilarski, T.; et al. Toward reliable off road autonomous vehicles operating in challenging environments. Int. J. Robot. Res. 2006, 25, 449–483. [Google Scholar] [CrossRef]
- Krotkov, E.; Fish, S.; Jackel, L.; McBride, B.; Perschbacher, M.; Pippine, J. The DARPA PerceptOR evaluation experiments. Auton. Robot. 2007, 22, 19–35. [Google Scholar] [CrossRef]
- Kuffner, J.J.; LaValle, S.M. RRT-connect: An efficient approach to single-query path planning. In Proceedings of the 2000 ICRA. Millennium Conference. IEEE International Conference on Robotics and Automation. Symposia Proceedings (Cat. No.00CH37065), San Francisco, CA, USA, 24–28 April 2000; Volume 2, pp. 995–1001. [Google Scholar] [CrossRef] [Green Version]
- Kuwata, Y.; Teo, J.; Fiore, G.; Karaman, S.; Frazzoli, E.; How, J.P. Real-Time Motion Planning With Applications to Autonomous Urban Driving. IEEE Trans. Control. Syst. Technol. 2009, 17, 1105–1118. [Google Scholar] [CrossRef]
- Jo, K.; Lee, M.; Kim, D.; Kim, J.; Jang, C.; Kim, E.; Kim, S.; Lee, D.; Kim, C.; Kim, S.; et al. Overall reviews of autonomous vehicle a1-system architecture and algorithms. IFAC Proc. Vol. 2013, 46, 114–119. [Google Scholar] [CrossRef]
- Kuffner, J.J.; Kagami, S.; Nishiwaki, K.; Inaba, M.; Inoue, H. Dynamically-Stable Motion Planning for Humanoid Robots. Auton. Robot. 2002, 12, 105–118. [Google Scholar] [CrossRef]
- Stilman, M. Global Manipulation Planning in Robot Joint Space With Task Constraints. IEEE Trans. Robot. 2010, 26, 576–584. [Google Scholar] [CrossRef]
- Tsymbal, O.; Mercorelli, P.; Sergiyenko, O. Predicate-Based Model of Problem-Solving for Robotic Actions Planning. Mathematics 2021, 9, 3044. [Google Scholar] [CrossRef]
- Cefalo, M.; Oriolo, G. A general framework for task-constrained motion planning with moving obstacles. Robotica 2019, 37, 575–598. [Google Scholar] [CrossRef] [Green Version]
- Xiong, C.; Zhou, H.; Lu, D.; Zeng, Z.; Lian, L.; Yu, C. Rapidly-Exploring Adaptive Sampling Tree*: A Sample-Based Path-Planning Algorithm for Unmanned Marine Vehicles Information Gathering in Variable Ocean Environments. Sensors 2020, 20, 2515. [Google Scholar] [CrossRef]
- Sangiovanni, B.; Incremona, G.P.; Piastra, M.; Ferrara, A. Self-Configuring Robot Path Planning With Obstacle Avoidance via Deep Reinforcement Learning. IEEE Control Syst. Lett. 2021, 5, 397–402. [Google Scholar] [CrossRef]
- Ziegler, J.; Bender, P.; Schreiber, M.; Lategahn, H.; Strauss, T.; Stiller, C.; Dang, T.; Franke, U.; Appenrodt, N.; Keller, C.G.; et al. Making Bertha Drive—An Autonomous Journey on a Historic Route. IEEE Intell. Transp. Syst. Mag. 2014, 6, 8–20. [Google Scholar] [CrossRef]
- Von Stryk, O.; Bulirsch, R. Direct and indirect methods for trajectory optimization. Ann. Oper. Res. 1992, 37, 357–373. [Google Scholar] [CrossRef]
- Diehl, M.; Bock, H.G.; Diedam, H.; Wieber, P.B. Fast direct multiple shooting algorithms for optimal robot control. In Fast Motions in Biomechanics and Robotics; Springer: Berlin/Heidelberg, Germany, 2006; pp. 65–93. [Google Scholar]
- Rao, A. A Survey of Numerical Methods for Optimal Control. Adv. Astronaut. Sci. 2010, 135, 497–528. [Google Scholar]
- Lampariello, R.; Nguyen-Tuong, D.; Castellini, C.; Hirzinger, G.; Peters, J. Trajectory planning for optimal robot catching in real-time. In Proceedings of the 2011 IEEE International Conference on Robotics and Automation, Shanghai, China, 9–13 May 2011; pp. 3719–3726. [Google Scholar] [CrossRef] [Green Version]
- Werner, A.; Trautmann, D.; Lee, D.; Lampariello, R. Generalization of optimal motion trajectories for bipedal walking. In Proceedings of the 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Hamburg, Germany, 28 September–2 October 2015; pp. 1571–1577. [Google Scholar] [CrossRef] [Green Version]
- Apostolopoulos, S.; Leibold, M.; Buss, M. Online motion planning over uneven terrain with walking primitives and regression. In Proceedings of the 2016 IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Sweden, 16–21 May 2016; pp. 3799–3805. [Google Scholar] [CrossRef] [Green Version]
- Weitschat, R.; Haddadin, S.; Huber, F.; Albu-Schäffer, A. Dynamic optimality in real-time: A learning framework for near-optimal robot motions. In Proceedings of the 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems, Tokyo, Japan, 3–7 November 2013; pp. 5636–5643. [Google Scholar] [CrossRef] [Green Version]
- Rawlings, J.B.; Mayne, D.Q.; Diehl, M.M. Model Predictive Control: Theory, Computation and Design; Nob Hill Publishing, LLC: Goleta, CA, USA, 2017. [Google Scholar]
- Allgöwer, F.; Zheng, A. Nonlinear Model Predictive Control; Birkhäuser: Basel, Switzerland, 2012; Volume 26. [Google Scholar]
- Qin, S.J.; Badgwell, T.A. An Overview of Nonlinear Model Predictive Control Applications. In Nonlinear Model Predictive Control; Allgöwer, F., Zheng, A., Eds.; Birkhäuser: Basel, Switzerland, 2000; pp. 369–392. [Google Scholar]
- Verschueren, R.; Zanon, M.; Quirynen, R.; Diehl, M. Time-optimal race car driving using an online exact hessian based nonlinear MPC algorithm. In Proceedings of the Control Conference (ECC), 2016 European, Aalborg, Denmark, 29 June–1 July 2016; pp. 141–147. [Google Scholar]
- Obayashi, M.; Uto, K.; Takano, G. Appropriate overtaking motion generating method using predictive control with suitable car dynamics. In Proceedings of the Decision and Control (CDC), 2016 IEEE 55th Conference, Las Vegas, NV, USA, 12–14 December 2016; pp. 4992–4997. [Google Scholar]
- Madås, D.; Nosratinia, M.; Keshavarz, M.; Sundström, P.; Philippsen, R.; Eidehall, A.; Dahlén, K.M. On path planning methods for automotive collision avoidance. In Proceedings of the 2013 IEEE Intelligent Vehicles Symposium (IV), Gold Coast, QLD, Australia, 23–26 June 2013; pp. 931–937. [Google Scholar] [CrossRef] [Green Version]
- Li, X.; Sun, Z.; Zhu, Q.; Liu, D. A unified approach to local trajectory planning and control for autonomous driving along a reference path. In Proceedings of the 2014 IEEE International Conference on Mechatronics and Automation, Tianjin, China, 3–6 August 2014; pp. 1716–1721. [Google Scholar] [CrossRef]
- Kim, D.; Carlo, J.D.; Katz, B.; Bledt, G.; Kim, S. Highly Dynamic Quadruped Locomotion via Whole-Body Impulse Control and Model Predictive Control. arXiv 2019, arXiv:1909.06586. [Google Scholar]
- Ohtsuka, T. A continuation/GMRES method for fast computation of nonlinear receding horizon control. Automatica 2004, 40, 563–574. [Google Scholar] [CrossRef]
- Feller, C.; Ebenbauer, C. A stabilizing iteration scheme for model predictive control based on relaxed barrier functions. Automatica 2016, 80, 328–339. [Google Scholar] [CrossRef] [Green Version]
- Soloperto, R.; Köhler, J.; Allgöwer, F.; Müller, M.A. Collision avoidance for uncertain nonlinear systems with moving obstacles using robust Model Predictive Control. In Proceedings of the 2019 18th European Control Conference (ECC), Naples, Italy, 25–28 June 2019; pp. 811–817. [Google Scholar] [CrossRef]
- Zhu, H.; Alonso-Mora, J. Chance-Constrained Collision Avoidance for MAVs in Dynamic Environments. IEEE Robot. Autom. Lett. 2019, 4, 776–783. [Google Scholar] [CrossRef]
- Li, S.; Li, Z.; Yu, Z.; Zhang, B.; Zhang, N. Dynamic Trajectory Planning and Tracking for Autonomous Vehicle With Obstacle Avoidance Based on Model Predictive Control. IEEE Access 2019, 7, 132074–132086. [Google Scholar] [CrossRef]
- Li, W.; Xiong, R. Dynamical Obstacle Avoidance of Task- Constrained Mobile Manipulation Using Model Predictive Control. IEEE Access 2019, 7, 88301–88311. [Google Scholar] [CrossRef]
- Houska, B.; Ferreau, H.; Diehl, M. ACADO Toolkit—An Open Source Framework for Automatic Control and Dynamic Optimization. Optim. Control. Appl. Methods 2011, 32, 298–312. [Google Scholar] [CrossRef]
- Kamel, M.; Alexis, K.; Achtelik, M.; Siegwart, R. Fast nonlinear model predictive control for multicopter attitude tracking on SO(3). In Proceedings of the 2015 IEEE Conference on Control Applications (CCA), Sydney, NSW, Australia, 21–23 September 2015; pp. 1160–1166. [Google Scholar] [CrossRef]
- Zanelli, A.; Horn, G.; Frison, G.; Diehl, M. Nonlinear Model Predictive Control of a Human-sized Quadrotor. In Proceedings of the 2018 European Control Conference (ECC), Limassol, Cyprus, 12–15 June 2018; pp. 1542–1547. [Google Scholar] [CrossRef]
- Ansari, A.; Murphey, T.D. Sequential Action Control: Closed-Form Optimal Control for Nonlinear Systems. IEEE Trans. Robot. 2016, 32, 1196–1214. [Google Scholar] [CrossRef]
- Egerstedt, M.; Wardi, Y.; Axelsson, H. Transition-time optimization for switched-mode dynamical systems. IEEE Trans. Autom. Control 2006, 51, 110–115. [Google Scholar] [CrossRef]
- Dinh, K.H.; Weiler, P.; Leibold, M.; Wollherr, D. Fast and close to optimal trajectory generation for articulated robots in reaching motions. In Proceedings of the 2017 IEEE International Conference on Advanced Intelligent Mechatronics (AIM), Munich, Germany, 3–7 July 2017; pp. 1221–1227. [Google Scholar] [CrossRef]
- Bryson, A.E.; Ho, Y.C. Applied Optimal Control Optimization, Estimation and Control; Wiley: Hoboken, NJ, USA, 1975; pp. 221–228. [Google Scholar]
- Pontryagin, L. Mathematical Theory of Optimal Processes, English ed.; Classics of Soviet Mathematics; CRC Press: Boca Raton, FL, USA, 1987. [Google Scholar]
- Mahil, S.M.; Al-Durra, A. Modeling analysis and simulation of 2-DOF robotic manipulator. In Proceedings of the 2016 IEEE 59th International Midwest Symposium on Circuits and Systems (MWSCAS), Abu Dhabi, United Arab Emirates, 16–19 October 2016; pp. 1–4. [Google Scholar] [CrossRef]
- Rucco, A.; Notarstefano, G.; Hauser, J. Dynamics exploration of a single-track rigid car model with load transfer. In Proceedings of the Decision and Control (CDC), 2010 49th IEEE Conference, Atlanta, GA, USA, 15–17 December 2010; pp. 4934–4939. [Google Scholar]
- Rubin, D.; Arogeti, S. Vehicle yaw stability control using rear active differential via sliding mode control methods. In Proceedings of the Control & Automation (MED), 2013 21st Mediterranean Conference, Chania, Crete, Greece, 25–28 June 2013; pp. 317–322. [Google Scholar]
- Liu, W.; Li, Z.; Li, L.; Wang, F.Y. Parking Like a Human: A Direct Trajectory Planning Solution. IEEE Trans. Intell. Transp. Syst. 2017, 18, 3388–3397. [Google Scholar] [CrossRef]
- Mayne, D.; Rawlings, J.; Rao, C.; Scokaert, P. Constrained model predictive control: Stability and optimality. Automatica 2000, 36, 789–814. [Google Scholar] [CrossRef]
- Chen, C.; Shaw, L. On receding horizon feedback control. Automatica 1982, 18, 349–352. [Google Scholar] [CrossRef]
- Michalska, H.; Mayne, D. Robust receding horizon control of constrained nonlinear systems. IEEE Trans. Autom. Control 1993, 38, 1623–1633. [Google Scholar] [CrossRef]
- Althoff, M.; Koschi, M.; Manzinger, S. CommonRoad: Composable benchmarks for motion planning on roads. In Proceedings of the 2017 IEEE Intelligent Vehicles Symposium (IV), Los Angeles, CA, USA, 11–14 June 2017; pp. 719–726. [Google Scholar] [CrossRef] [Green Version]
- de Souza Mendes, A.; Meneghetti, D.D.R.; Ackermann, M.; de Toledo Fleury, A. Vehicle Dynamics-Lateral: Open Source Simulation Package for MATLAB; Technical report; SAE Technical Paper; SAE: Warrendale, PA, USA, 2016. [Google Scholar]
- Mayne, D.Q.; Michalska, H. Receding horizon control of nonlinear systems. IEEE Trans. Autom. Control 1990, 35, 814–824. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| SAC | Extended SAC | TC-SAC | FOGA | |
|---|---|---|---|---|
| Total cost | ||||
| Computation time |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hoang-Dinh, K.; Leibold, M.; Wollherr, D. A Fast and Close-to-Optimal Receding Horizon Control for Trajectory Generation in Dynamic Environments. Robotics 2022, 11, 72. https://doi.org/10.3390/robotics11040072
Hoang-Dinh K, Leibold M, Wollherr D. A Fast and Close-to-Optimal Receding Horizon Control for Trajectory Generation in Dynamic Environments. Robotics. 2022; 11(4):72. https://doi.org/10.3390/robotics11040072
Chicago/Turabian StyleHoang-Dinh, Khoi, Marion Leibold, and Dirk Wollherr. 2022. "A Fast and Close-to-Optimal Receding Horizon Control for Trajectory Generation in Dynamic Environments" Robotics 11, no. 4: 72. https://doi.org/10.3390/robotics11040072
APA StyleHoang-Dinh, K., Leibold, M., & Wollherr, D. (2022). A Fast and Close-to-Optimal Receding Horizon Control for Trajectory Generation in Dynamic Environments. Robotics, 11(4), 72. https://doi.org/10.3390/robotics11040072