
An Edge-Based Architecture for Offloading Model Predictive Control for UAVs



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
1.1. Background and Motivation
1.2. Contributions
1.3. Outline
2. Model Predictive Control
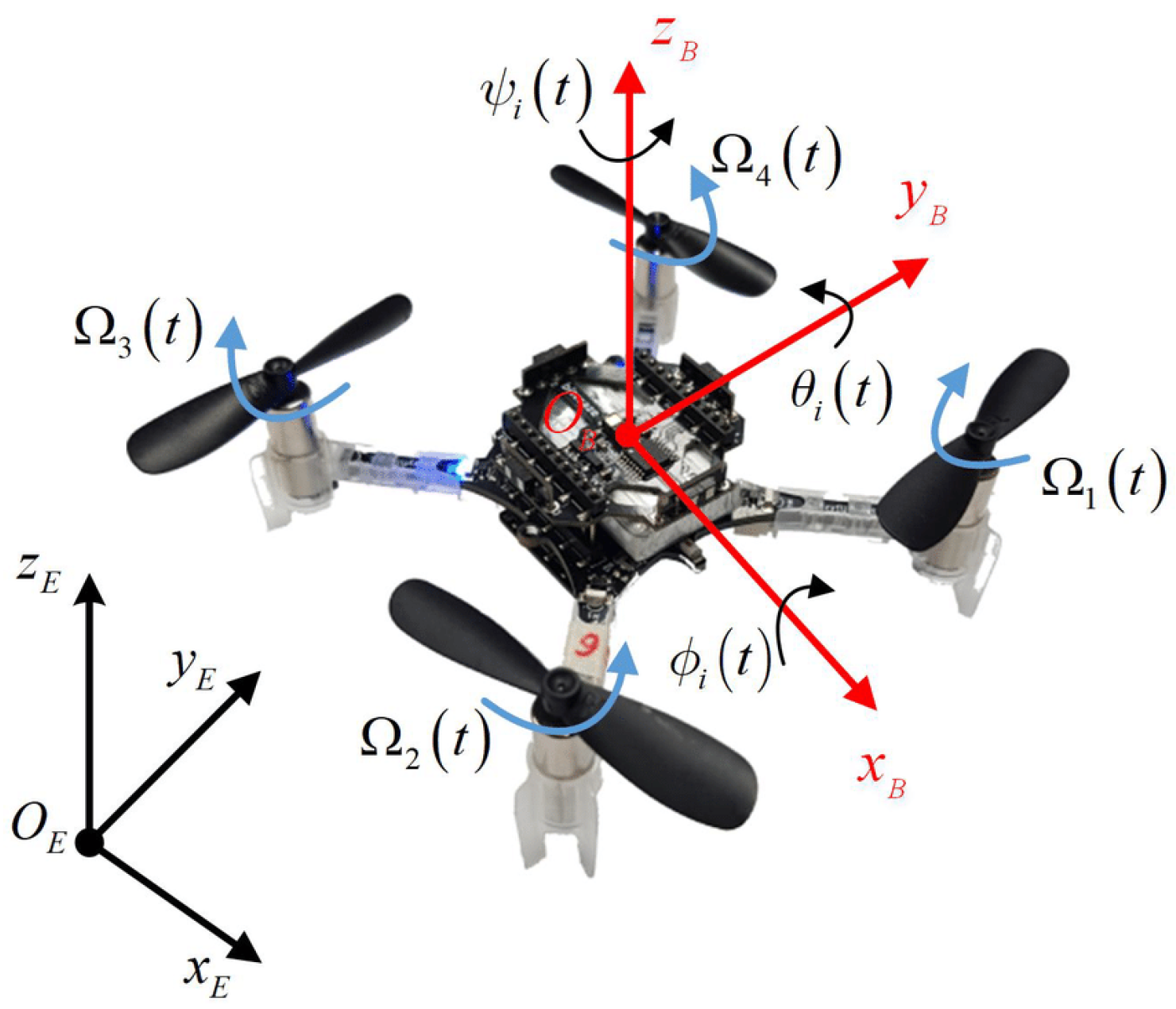
2.1. UAV Kinematics
2.2. Cost Function
2.3. Constrain Formulation
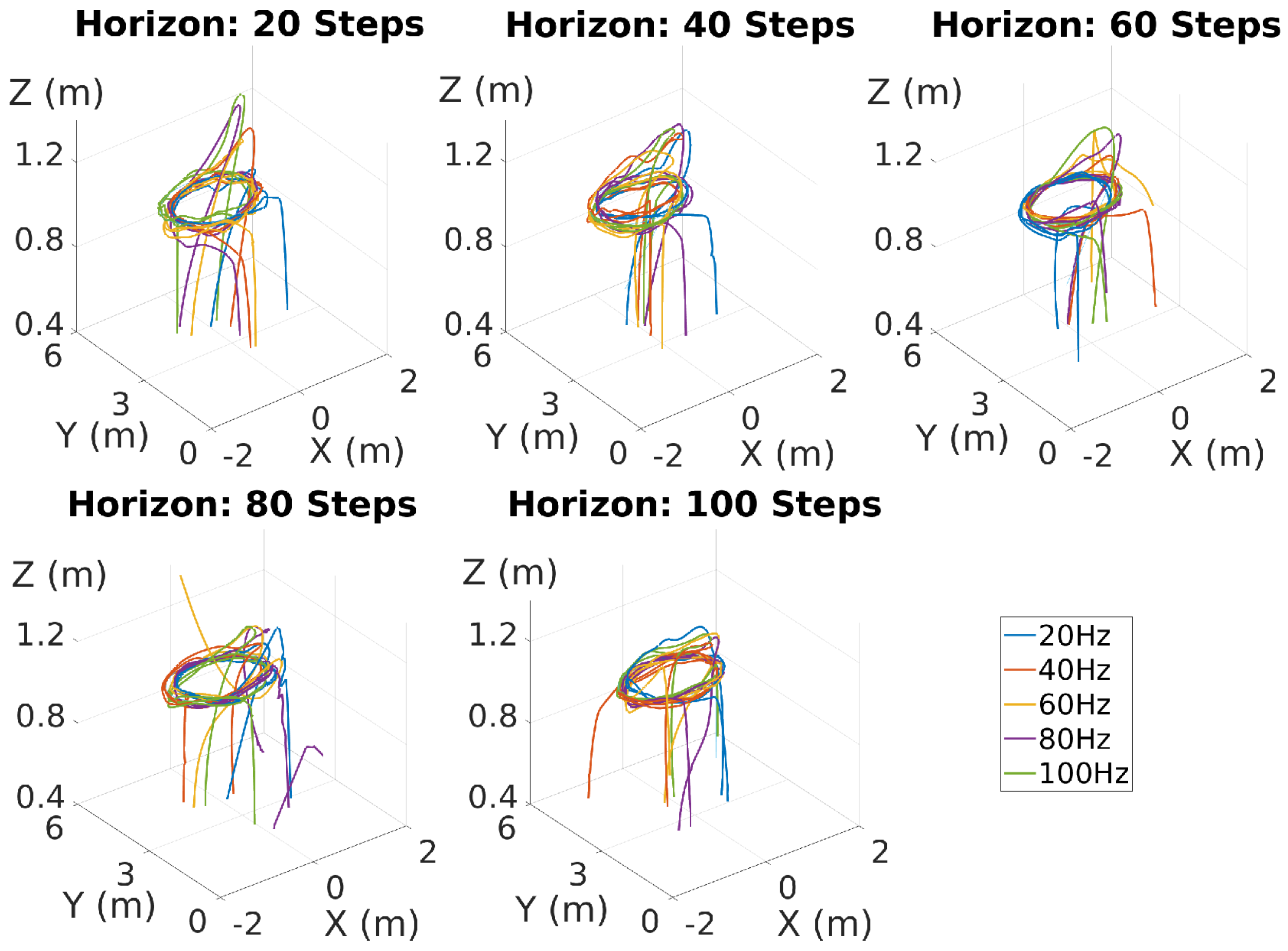
2.3.1. MPC Prediction Horizon
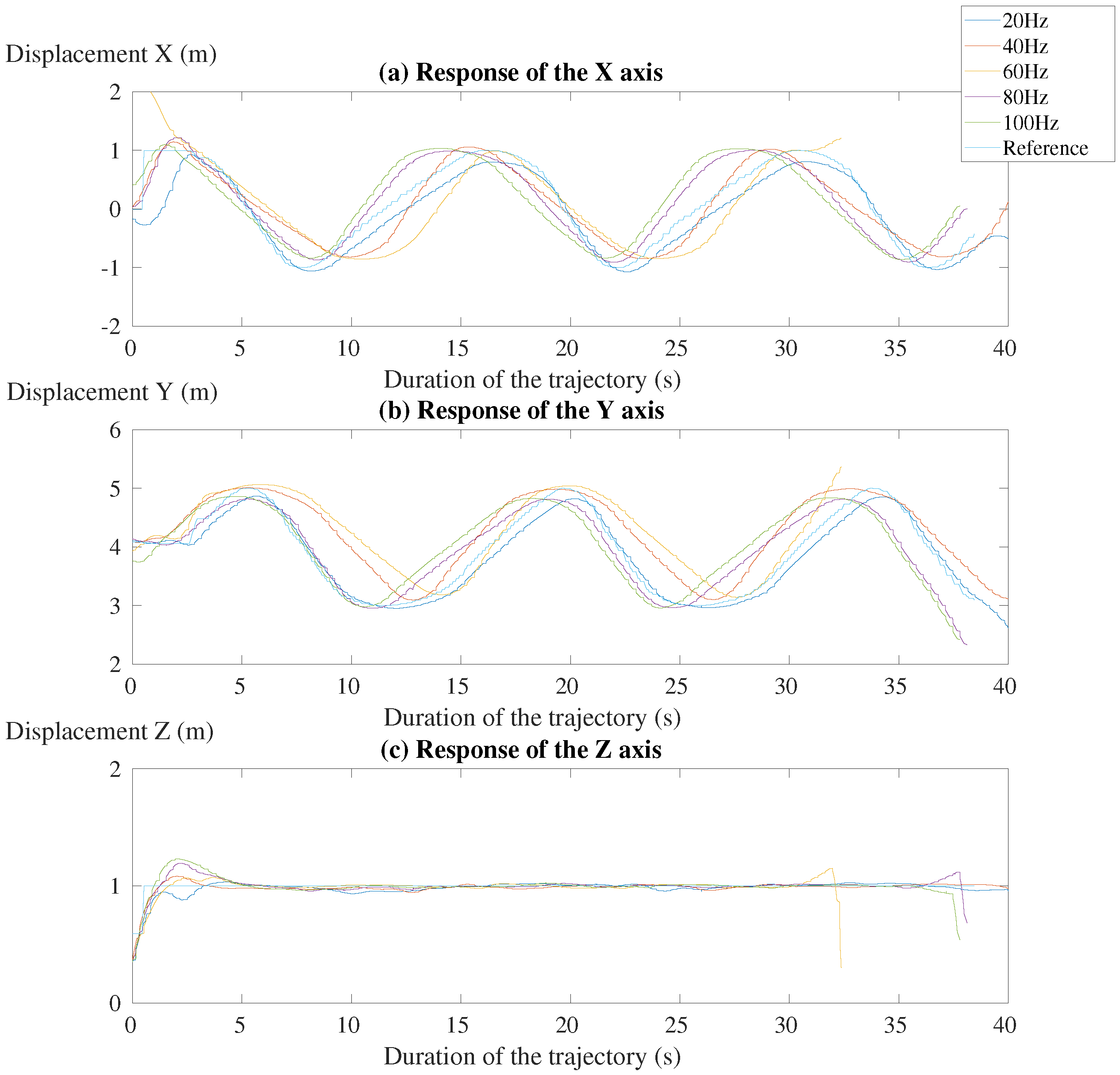
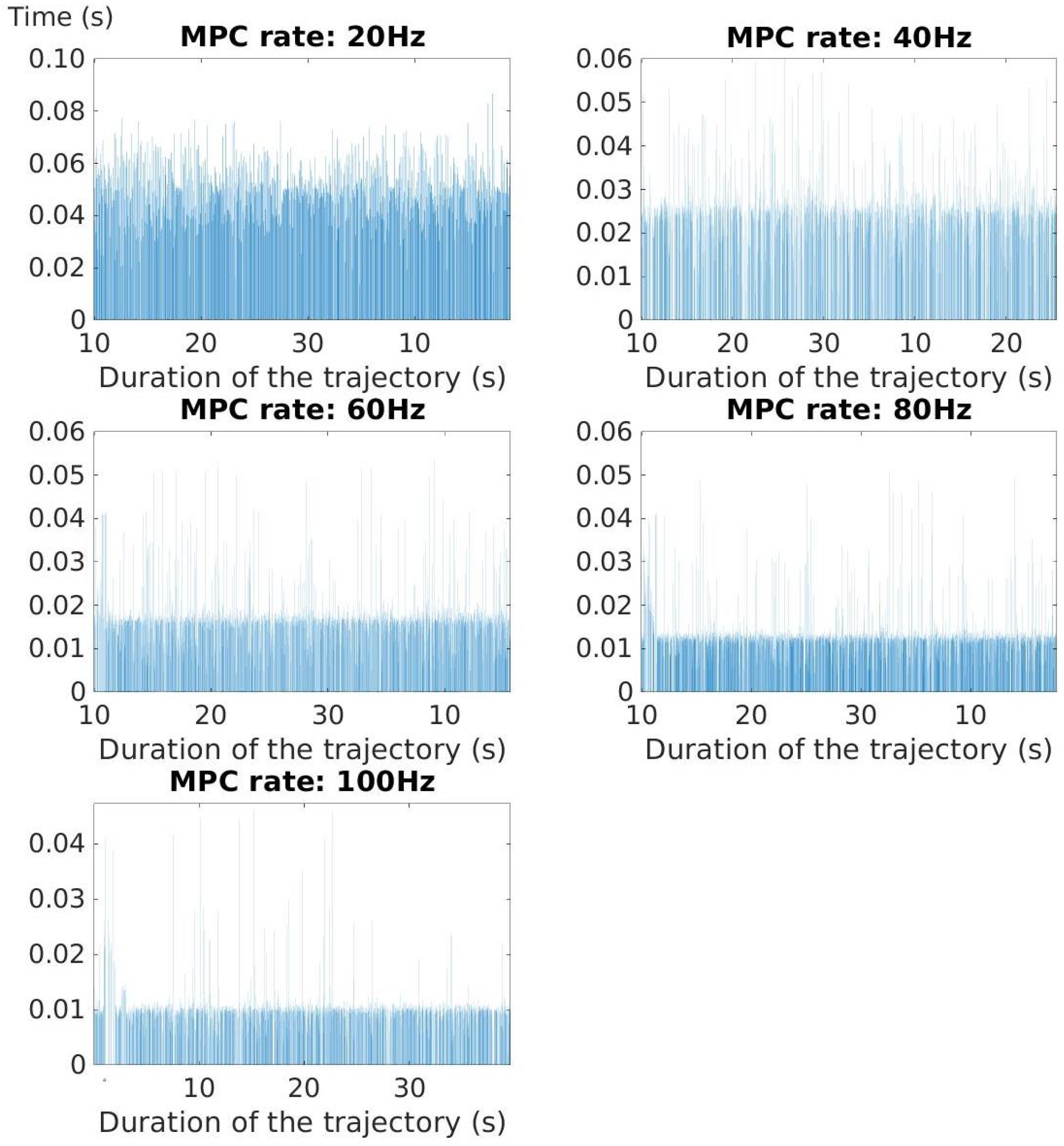
2.3.2. MPC Rate
3. Edge Architecture
4. Experimental Results and Evaluation
5. Conclusions and Future Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- 10 Edge Computing Use Case Examples. Available online: https://stlpartners.com/articles/edge-computing/10-edge-computing-use-case-examples (accessed on 1 July 2022).
- Sarker, V.K.; Queralta, J.P.; Gia, T.N.; Tenhunen, H.; Westerlund, T. Offloading slam for indoor mobile robots with edge-fog-cloud computing. In Proceedings of the IEEE 2019 1st International Conference on Advances in Science, Engineering and Robotics Technology (ICASERT), Dhaka, Bangladesh, 3–5 May 2019; pp. 1–6. [Google Scholar]
- Tian, N.; Tanwani, A.K.; Chen, J.; Ma, M.; Zhang, R.; Huang, B.; Goldberg, K.; Sojoudi, S. A fog robotic system for dynamic visual servoing. In Proceedings of the IEEE 2019 International Conference on Robotics and Automation (ICRA), Montreal, QC, Canada, 20–24 May 2019; pp. 1982–1988. [Google Scholar]
- Tanwani, A.K.; Mor, N.; Kubiatowicz, J.; Gonzalez, J.E.; Goldberg, K. A fog robotics approach to deep robot learning: Application to object recognition and grasp planning in surface decluttering. In Proceedings of the IEEE 2019 International Conference on Robotics and Automation (ICRA), Montreal, QC, Canada, 20–24 May 2019; pp. 4559–4566. [Google Scholar]
- Gudi, S.L.K.C.; Ojha, S.; Johnston, B.; Clark, J.; Williams, M.A. Fog robotics for efficient, fluent and robust human-robot interaction. In Proceedings of the 2018 IEEE 17th International Symposium on Network Computing and Applications (NCA), Cambridge, MA, USA, 1–3 November 2018; pp. 1–5. [Google Scholar]
- Barnawi, A.; Alharbi, M.; Chen, M. Intelligent Search and Find System for Robotic Platform Based on Smart Edge Computing Service. IEEE Access 2020, 8, 108821–108834. [Google Scholar] [CrossRef]
- Skarin, P.; Tärneberg, W.; Årzen, K.E.; Kihl, M. Towards Mission-critical control at the edge and over 5G. In Proceedings of the 2018 IEEE International Conference on Edge Computing (EDGE), San Francisco, CA, USA, 2–7 July 2018; pp. 50–57. [Google Scholar]
- Årzén, K.E.; Skarin, P.; Tärneberg, W.; Kihl, M. Control over the edge cloud–An mpc example. In Proceedings of the 1st International Workshop on Trustworthy and Real-time Edge Computing for Cyber-Physical Systems, Nashville, TN, USA, 11 December 2018. [Google Scholar]
- Skarin, P.; Eker, J.; Årzén, K.E. A cloud-enabled rate-switching MPC architecture. In Proceedings of the 2020 59th IEEE Conference on Decision and Control (CDC), Jeju, Korea, 14–18 December 2020; pp. 3151–3158. [Google Scholar]
- Skarin, P.; Eker, J.; Kihl, M.; Årzén, K.E. An assisting model predictive controller approach to control over the cloud. arXiv 2019, arXiv:1905.06305. [Google Scholar]
- Skarin, P.; Eker, J.; Kihl, M.; Årzén, K.E. Cloud-assisted model predictive control. In Proceedings of the 2019 IEEE International Conference on Edge Computing (EDGE), Milan, Italy, 8–13 July 2019; pp. 110–112. [Google Scholar]
- Skarin, P.; Eker, J.; Årzén, K.E. Cloud-based model predictive control with variable horizon. IFAC-PapersOnLine 2020, 53, 6993–7000. [Google Scholar] [CrossRef]
- Gräfe, A.; Eickhoff, J.; Trimpe, S. Event-triggered and distributed model predictive control for guaranteed collision avoidance in UAV swarms. arXiv 2022, arXiv:2206.11020. [Google Scholar] [CrossRef]
- Tsokalo, I.A.; Wu, H.; Nguyen, G.T.; Salah, H.; Fitzek, F.H. Mobile edge cloud for robot control services in industry automation. In Proceedings of the 2019 16th IEEE Annual Consumer Communications & Networking Conference (CCNC), Las Vegas, NV, USA, 11–14 January 2019; pp. 1–2. [Google Scholar]
- Ma, Y.; Lu, C.; Sinopoli, B.; Zeng, S. Exploring edge computing for multitier industrial control. IEEE Trans.-Comput.-Aided Des. Integr. Circuits Syst. 2020, 39, 3506–3518. [Google Scholar] [CrossRef]
- Spatharakis, D.; Avgeris, M.; Athanasopoulos, N.; Dechouniotis, D.; Papavassiliou, S. A switching offloading mechanism for path planning and localization in robotic applications. In Proceedings of the 2020 International Conferences on Internet of Things (iThings) and IEEE Green Computing and Communications (GreenCom) and IEEE Cyber, Physical and Social Computing (CPSCom) and IEEE Smart Data (SmartData) and IEEE Congress on Cybermatics (Cybermatics), Rhodes, Greece, 2–6 November 2020. [Google Scholar]
- Kochovski, P.; Sakellariou, R.; Bajec, M.; Drobintsev, P.; Stankovski, V. An architecture and stochastic method for database container placement in the edge-fog-cloud continuum. In Proceedings of the 2019 IEEE International Parallel and Distributed Processing Symposium (IPDPS), Rio de Janeiro, Brazil, 20–24 May 2019; pp. 396–405. [Google Scholar]
- Figueiredo, R.; Subratie, K. EdgeVPN. io: Open-source Virtual Private Network for Seamless Edge Computing with Kubernetes. In Proceedings of the 2020 IEEE/ACM Symposium on Edge Computing (SEC), San Jose, CA, USA, 12–14 November 2020; pp. 190–192. [Google Scholar]
- Cha, J.G.; Kim, S.W. Design and Evaluation of Container-based Networking for Low-latency Edge Services. In Proceedings of the 2021 International Conference on Information and Communication Technology Convergence (ICTC), Jeju Island, Korea, 20–22 October 2021; pp. 1287–1289. [Google Scholar]
- Lumpp, F.; Panato, M.; Fummi, F.; Bombieri, N. A Container-based Design Methodology for Robotic Applications on Kubernetes Edge-Cloud architectures. In Proceedings of the 2021 Forum on Specification & Design Languages (FDL), Antibes, France, 8–10 September 2021; pp. 1–8. [Google Scholar]
- Pahl, C.; Lee, B. Containers and clusters for edge cloud architectures–a technology review. In Proceedings of the 2015 3rd International Conference on Future Internet of Things and Cloud, Rome, Italy, 24–26 August 2015; pp. 379–386. [Google Scholar]
- Shah, J.; Dubaria, D. Building modern clouds: Using docker, kubernetes & Google cloud platform. In Proceedings of the 2019 IEEE 9th Annual Computing and Communication Workshop and Conference (CCWC), Las Vegas, NV, USA, 7–9 January 2019; pp. 0184–0189. [Google Scholar]
- Lindqvist, B.; Mansouri, S.S.; Nikolakopoulos, G. Non-linear mpc based navigation for micro aerial vehicles in constrained environments. In Proceedings of the 2020 European Control Conference (ECC), St. Petersburg, Russia, 12–15 May 2020; pp. 837–842. [Google Scholar]
- Lindqvist, B.; Mansouri, S.S.; Agha-mohammadi, A.a.; Nikolakopoulos, G. Nonlinear MPC for collision avoidance and control of UAVs with dynamic obstacles. IEEE Robot. Autom. Lett. 2020, 5, 6001–6008. [Google Scholar] [CrossRef]
- Production-Grade Container Orchestration. Available online: https://kubernetes.io/ (accessed on 1 July 2022).
- Nguyen, A.T.; Lee, J.W.; Nguyen, T.B.; Hong, S.K. Collision-free Formation Control of Multiple Nano-quadrotors. arXiv 2021, arXiv:2107.13203. [Google Scholar]
- Crazyflie 2.0: System Architecture. Available online: https://www.bitcraze.io/2014/07/crazyflie-2-0-system-architecture/ (accessed on 3 July 2022).











Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Seisa, A.S.; Satpute, S.G.; Lindqvist, B.; Nikolakopoulos, G. An Edge-Based Architecture for Offloading Model Predictive Control for UAVs. Robotics 2022, 11, 80. https://doi.org/10.3390/robotics11040080
Seisa AS, Satpute SG, Lindqvist B, Nikolakopoulos G. An Edge-Based Architecture for Offloading Model Predictive Control for UAVs. Robotics. 2022; 11(4):80. https://doi.org/10.3390/robotics11040080
Chicago/Turabian StyleSeisa, Achilleas Santi, Sumeet Gajanan Satpute, Björn Lindqvist, and George Nikolakopoulos. 2022. "An Edge-Based Architecture for Offloading Model Predictive Control for UAVs" Robotics 11, no. 4: 80. https://doi.org/10.3390/robotics11040080
APA StyleSeisa, A. S., Satpute, S. G., Lindqvist, B., & Nikolakopoulos, G. (2022). An Edge-Based Architecture for Offloading Model Predictive Control for UAVs. Robotics, 11(4), 80. https://doi.org/10.3390/robotics11040080