1. Introduction
Gaussian process regression (GPR), also referred to as Kriging [
1] in geostatistics, is a generic supervised learning method that is designed to solve regression problems. GPR models can be used to predict the effect variables of a partially observed physical process by building a
continuous map with artificial data. Such maps have been used to model spatial phenomena, including temperatures [
2], magnetic field intensity [
3], radiation field [
4], spatial localization of minerals in mining geology [
1], and epidemic growth [
5]. Key strengths of GPR modeling include the ability to use repeated observations, collected at the same location, within the training data [
4]; acceptance of both sparse and highly clustered data [
4]; data acquisition sampled at variable time and/or space [
1]; ability to learn an effective representation of nonlinear dynamics even using small data sets [
6]; and predictions consist of two types of information, including the
mean function (corresponding to the best estimation in average) and an associated confidence (expressed using the standard deviation). Although often neglected when applying GPR, in this article, we make explicit use of the confidence metrics.
Combining GPR with control systems is an emerging topic that has had increasing interest in recent years [
7,
8]. This is a versatile method that has numerous applications in robotics. From a broader perspective, in our work, we seek to design bespoke control algorithms that are improved by integrating the
stochastic nature of a real process (or plant) into their design. In this respect, GPR has been demonstrated to be a highly effective approach to modeling, and it is the technique utilized in this work.
1.1. Literature Review
To explain the opportunities for combining a GPR model within a control system for use with robotic systems we employ the classical closed-loop schematic diagram provided in
Figure 1. In the following discussion, we separate the literature review into research related to plant, control and reference.
1.1.1. Plant
It is relatively common when developing control systems to utilize an existing model of the plant. For example, the dynamic model, defined in Equation (
1), may be available:
where
is often derived from first principles (e.g., a kinematic model where the velocity is the derivative of the position; a mechanical model derived from Euler–Lagrange equations that make use of the mass, inertia, gravity, etc.; and an electrical model containing resistors, capacitors, inductance, etc.); in Equation (
1),
is the discrete state variable and
is the control action. Recognizing that such models are often imperfect, the model can be further improved by augmenting it using a learned part,
, such that the overall plant is defined as shown in Equation (
2):
In [
8,
9],
can be identified using GPR with the assumption that both
and
are measurable, and
is defined such that it can explain the difference between
and
. The function,
, is identified, or learned, using data collected when the same task is executed repeatedly. The function,
, can be defined in a variety of ways (e.g., linear
versus nonlinear), but it is important that, following identification, it can be applied to novel situations [
8].
In situations where an existing model of the plant
in (
2) is not available, the system dynamics relies entirely on the learned part
. In [
10], this is defined as
, and, using GPR, a one-step ahead prediction model is built using
as training inputs and the difference
as the training target. An advantage of this approach is that the system dynamics,
, do not fall back to zero in unexplored areas but instead remain at
. In a different work [
6], such models are called Gaussian process dynamical models and are used to predict latent trajectories (in the context of generating human motion, such as walking).
1.1.2. Reference
To improve the performance of a model-based control system, refs. [
11,
12,
13] applied GPR to learn a reference periodic signal from noisy data. The resulting model was then used within the control system to predict the most likely future evolution of the reference signal to improve control performance. The technique was applied to a medical robotics application. In related work, refs. [
4,
14] used GPR models in conjunction with Simultaneous localization and mapping (SLAM) to build
continuous radiological maps of a priori unknown radioactive areas.
In [
15], a GPR model was used to address a quality prediction problem, where the aim was to accurately and robustly predict post-process responses from online measurements.
1.1.3. Control
In relation to control, we can divide the literature into work where GPR models contribute indirectly and directly to the control solution.
To begin, we will consider research where GPR models contribute
indirectly to the control solution, in the sense that a standard (off-the-shelf) control law is used in conjunction with a model of the plant or reference, that makes use of a GPR model. Such applications are described in [
9], which utilized an
robust controller; [
11,
12,
13], which used GPR models within a linear model predictive controller (MPC); and [
8], which integrated a GPR model into a nonlinear MPC. An insightful review on learning-based MPC is presented in [
7]. Furthermore, a GPR model-based policy search method (reinforcement learning) is presented in [
10], which is shown to be very efficient in terms of required interaction time for learning the control policy.
GPR models can also contribute directly to the control solution. For example, the inverse kinematics problem of robotic arm manipulators was solved using a GPR model in [
16] and in several articles mentioned in [
8]. Relevant research was also carried out in [
17], where a cost function modeled using a GPR
was learned (the state
x consisted of the tuning parameters of a PI controller) and then the predicted minimum
was used to explore the real system behavior, experimentally.
The work presented in this paper adds to the use of GPR modeling to directly contribute to the control solution.
1.2. Theory on GPR Modeling
Learning in a Bayesian framework involves using probability to express all forms of uncertainty [
18]. Specifically, a joint probability distribution is established over all unknown quantities, which is then used to express the relation between these quantities. In case other quantities are accessible and known, a (joint) conditional probability is used instead. GPR modeling relies on the Bayesian framework. Let us assume that values
are known, each belonging to
with dimension
, and scalar continuous function values
are unknown, each belonging to
. The
prior, based on
past knowledge, expresses the relation between an arbitrary number of the unknowns (
) treated as continuous random variables, in the absence of any new data as [
19,
20]:
where
is a known
mean function, and the covariance matrix
consists of elements
with known kernel function
; the notation
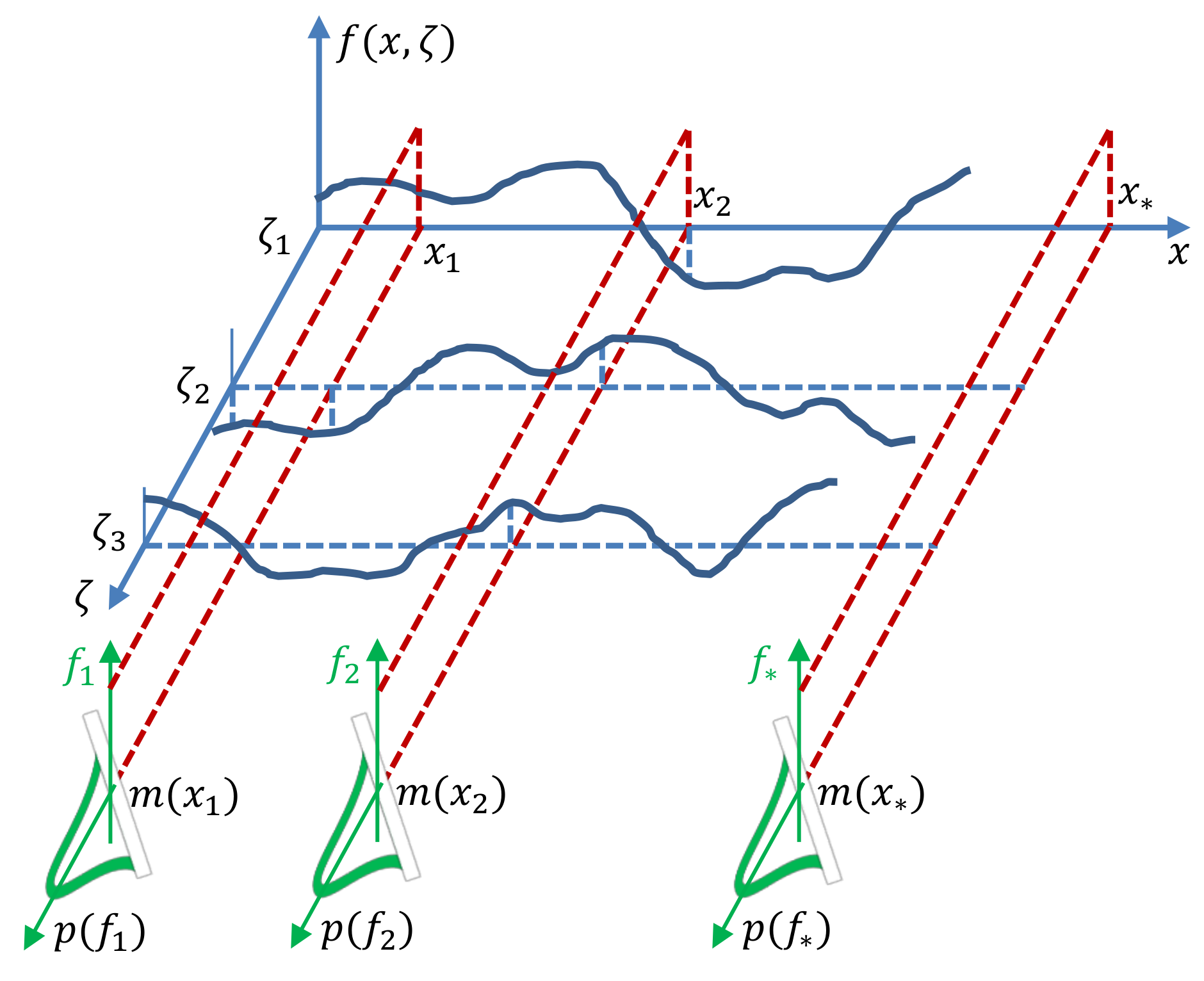
stands for the (multivariate) normal distribution. The prior (
3) can be written in a more compact form:
emphasizing the fact that a Gaussian process is fully defined by the pair
[
10]. An example is shown in
Figure 2.
We now split
into
training and
testing , with
. In the particular case of one testing location (
), the scalar notation
is used, as in
Figure 2. The noisy observations random variables
, where
and
, form the observations vector
. Thus, the derived joint density is
where the (noise-free) function values at the test points
,
, are unknown;
I is the identity matrix, and notation
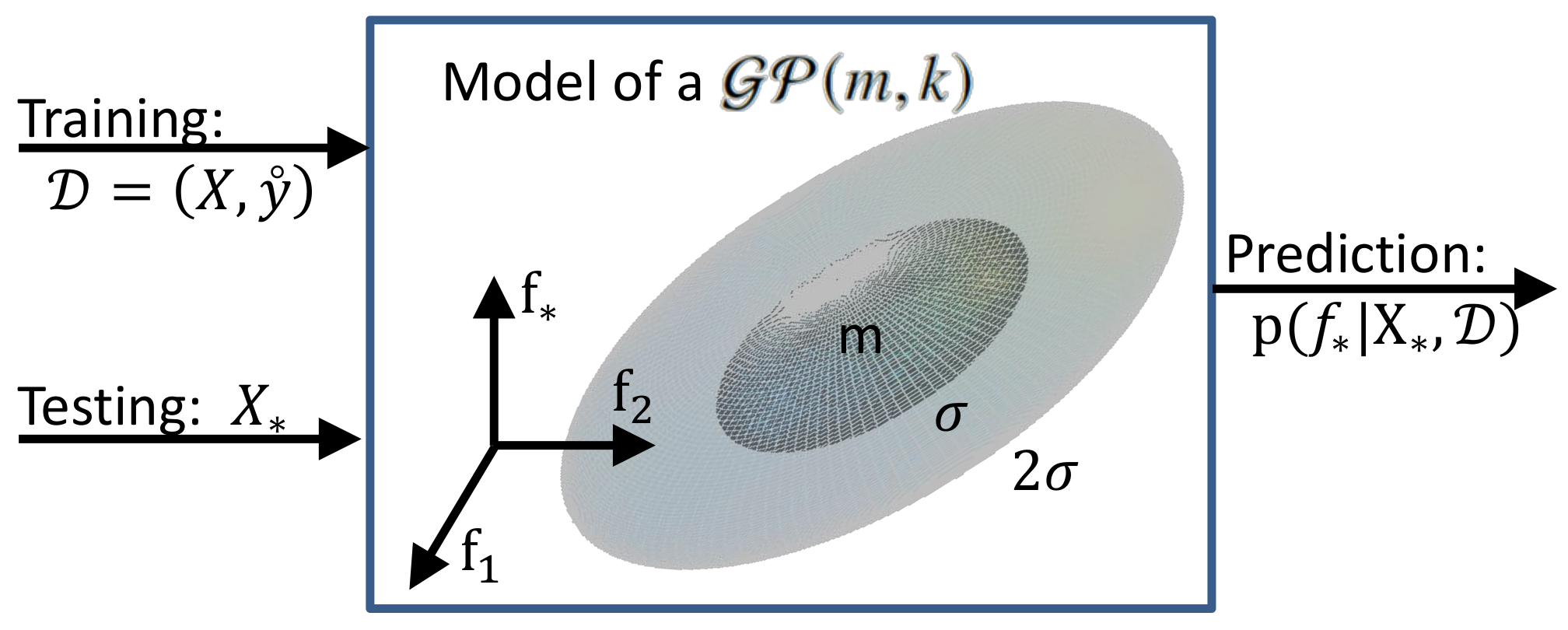
stands for the transpose. The reasoning within Bayesian inference is to use new experimental training data, namely a sample
, with
, the recorded observations, to “update” the prior distribution into the posterior predictive density [
19]:
where
is the mean function and
is the covariance matrix. The notation
E stands for the expected value operator. This is depicted in
Figure 3.
The proof makes use of the relations between the marginals and conditionals of a multivariate normal distribution [
19,
23]. All these distributions implicitly depend on hyperparameters
, with
parameterizing
k appearing in (
4). These hyperparameters can be experimentally identified by optimizing the log marginal likelihood [
19].
The noisy predictive observations
where
and
, have the mean function
and variance
where the operator ‘diag’ takes the diagonal of a matrix.
1.3. From Model-Based to Data-Driven Control
In a context where uncertainties play a fundamental role, deciding whether to use a model-based or data-driven approach involves a trade-off between available project resources. Mechanistic models can be difficult and time-consuming to identify and may contain significant errors. Their main advantage is the analytical insight (theory), the ability to relate physical quantities to experimental observations. Quite often, the model-based approach involves solving a complex optimization problem. In [
24], a robust concurrent design for a collaborative 2-degrees-of-freedom robot (cobot) is presented, where the uncertainty lies in the human–robot interaction; the robust concurrent design ensures that differences in operators have little impact on the system performance, whereas in our user-centered design, the shared control accounts for the specificity of each operator (
Section 2.1); the optimization takes into account, simultaneously, the dynamic model of the mechanical structure as well as the controller equations. A different theoretical framework to deal with the robustness to human operators is presented in [
25]: by lowering the inertia of motors that drive an upper-limb exoskeleton prototype, it is shown that control performance is high and also insensitive to uncertainties in the human dynamics (the wearer of the exoskeleton).
Addressing uncertainties using the alternative sensor-based, data-driven approach is often simpler to implement, although it can be time consuming in terms of experimentation and often lacks the analytical insight (theory). Reinforcement learning (RL) discovers optimal behaviors through trial and error in a simulated (see, for example, [
26]) or real environment, by employing a reward function that penalizes undesired behaviors. In [
26], RL was used in learning a robotic manipulator’s motion planning and control, then grasping was demonstrated using that robotic manipulator in the context of obstacle avoidance.
1.4. Obstacle Avoidance in Nuclear Robotics
The aim of this work is to design control systems that are able to support the deployment of robotic systems in hazardous nuclear environments, such as those described in [
4,
14,
27,
28]. In such environments, it is typically necessary to avoid getting too close to radioactive material, which may damage electronic components within the robot or cause the robot to become contaminated. For example, the Spot robot, manufactured by Boston Dynamics, has, by default, a low-level automation system that ensures that the robot keeps an arbitrary distance away from obstacles. This low-level ability means that maneuvering the robot through tele-operation is significantly simplified, particularly in cluttered environments where it is tele-operated beyond the line of sight [
4,
29].
Figure 4 illustrates four types of tele-operated robots, each belonging to a different category of robot: land based (e.g., the SuperDroid HD2 in
Figure 4a), water based (e.g., the BlueROV2 in
Figure 4b), air (e.g., the DJI Matrice 300 RTK in
Figure 4c) and manipulator (e.g., the KUKA LBR iiwa 14 R820 in
Figure 4d). All of these robots have features in common. For example, they can each be tele-operated using a joypad or similar device (e.g., the Sony PlayStation DualShock 4 illustrated in the middle of
Figure 4) and they can all be used for safety-critical applications in hazardous (or extreme) environments. In such situations, they might all require the same (low-level) functionality to be implemented, such as the obstacle avoidance control algorithm we present in
Section 2.
General-purpose obstacle avoidance algorithms can be derived from path planning using various techniques, including the artificial potential fields method, which introduces repulsive forces [
30,
31], sampling-based methods [
30] and the dynamic window approach, which has been implemented in ROS [
32]. When using these techniques, the final goal location needs to be specified in advance, whereas when using the method proposed in this article, this information is not required.
1.5. Research Contribution
In this article, we propose a novel obstacle avoidance shared control algorithm based on GPR model predictions, in a stochastic context. First, to the best of our knowledge, making use of the confidence interval of GPR models has not been proposed yet in the scientific literature for addressing obstacle avoidance problems. It is our intention to make a significant contribution in this setting. Second, a key message of this article is that improved control performance can be achieved by using the predicted posterior distribution of a Gaussian process. When using GPR models for prediction, it is typical for the mean function to be used, but the associated confidence metric is typically ignored. In this article, we propose to use the information contained within the confidence metric, defined within the GPR model. Using this information, we demonstrate that it is possible to design a control system that is particularly suited to safety-critical robotic applications. This research opportunity is novel and has not been exploited yet.
Continuing the work presented in [
33], we extend the assist-as-needed (or shared control) algorithm dealing with static obstacle avoidance such that it incorporates
learning and
prediction based on a GPR model, rather than using the first-principle, mechanistic models that were utilized in [
33]. More specifically, we make the transition from a physically inspired model-based controller [
33] to a new data-driven control solution. In this respect, a GPR model ensures a smooth transition, as (some of) the
hyperparameters can be directly related to the physics of the real process. The relationship that exists for the physical properties of the robot contributed to our decision to use GPR in favor of other more abstract models, such as neural networks [
34]. This is particularly important in nuclear applications, where transparency is typically required to ensure regulatory approval for new technologies [
35].
Having provided a background to this work, in
Section 2, we present the proposed shared control algorithm for safe obstacle avoidance in the context of tele-operated robots. In
Section 3, we show that this shared control relies on a GPR model to inform how it should make a safe stop maneuver. Finally, the paper ends with conclusions in
Section 5.
2. Shared Control
The concept of shared control relies on the cooperation (or collaboration) between two actors: in this work, a human and a machine. The principle of the technique is to combine the best capabilities of each to produce better results than would be obtained when each is used in isolation. It is therefore essential that the algorithms are designed such that they avoid conflict (or contradiction) between the two parties.
2.1. A User-Centered Design
There will be some level of variability in driving style when the operation of a robot is transferred from one user to another. For example, an experienced operator may well control the robot differently to a novice, and even for the same user, executing the same task repeatedly might result in different styles at the beginning and end of a working day, as the operator tires. Hence, we believe that using a “one-size-fits-all” shared control solution is not sensible. One possible way to address this problem would be to group users into clusters and define specific operating modes with purposely-tuned control algorithms for each cluster. However, this does not exclude that some individuals within the same group might feel unhappy with the end result. For this reason, we are interested in a personalized and highly customizable shared control algorithm, able to capture and incorporate the notion of variability at the user level.
2.2. Addressing Uncertainty
In our previous work [
33], using a highly complex offline optimization-based procedure, we identified a relatively simple shared control algorithm that is illustrated in
Figure 5. In this work, we propose to replace the optimization procedure, ultimately used to compute the blue curve in
Figure 5, with a process able to learn this curve from a small number of experiments. All
-points on the blue curve in
Figure 5 correspond to initial states, and from any of these initial states, the controller should be able to advance the robot toward an obstacle in front of it, as shown in
Figure 5b, and stop it safely in a fixed but otherwise arbitrary amount of time
next to the obstacle.
In reality, the shape of the blue curve will be dependent on the human operator’s style of driving and also on the environment. For example, it may be desirable for a robot advancing on sand to behave differently to a robot moving on a concrete floor. The process is stochastic in that consecutive repetitions of the same task might involve (slightly) different actions from the operator, as well as interactions of the robot with the environment, e.g., slipping and bouncing when braking. To summarize, the sources of uncertainty are the human operator (the driving style), the robotic platform (software and hardware) and the environment conditions. Consequently, we might have to deal with a family of curves associated with a particular driver and a particular environment, and the question is how to make intelligent usage of all this information in the shared control algorithm.
2.3. Advancing Forward and Turning
The shared control algorithm adjusts both the linear and the angular velocities.
Figure 5 explains how the linear velocity control is implemented. In this case, unsafe decisions from the human operator, such as requesting a linear velocity
that is too high in situations where the robot is too close to an obstacle
, would make the shared control algorithm act by reducing
v toward the pre-computed blue boundary curve as shown in
Figure 5a. Not shown in that figure, the angular velocity is also reduced proportionally, thus completing the algorithm. Whilst the above analysis assumes the robot advances in a forward direction only, this is simply a convention and analogously, the same principles apply when the vehicle moves backward, although this situation is out of the scope for this paper.
2.4. Algorithm
In this section, the case of the robot advancing toward a forward-facing obstacle is analyzed. The shared control Algorithm 1 has five inputs and two outputs. The inputs are as follows: the linear velocity and angular velocity
measured by the odometry; the joypad data corresponding to the desired linear velocity and desired angular velocity
(note, there is a one-to-one mapping between the location of the joystick and the steady-state velocity [
33]); and
is the distance to the closest obstacle located straight ahead along the
-axis in
Figure 5b, measured using a 3D LiDAR (the Velodyne VLP16 in
Figure 6c). The outputs of the algorithm are the requested linear velocity and requested angular velocity
, sent to the robot’s controller.
| Algorithm 1 The proposed obstacle avoidance shared control: the case of a vehicle advancing forward with an obstacle located straight ahead |
| ; | ▹ initialization: by default shared control is disabled |
| if and | ▹ vehicle advancing forward without rotation |
| and | ▹ driver expresses intention to advance forward |
| then | |
| Find | ▹ identify the closest obstacle |
| | ▹ blue_curve from Figure 5a |
| = | ▹ reduce proportionally to the decrease in vis-à-vis |
| end if | |
Not presented here, the backward motion can be easily derived analogously to Algorithm 1. Currently, we are working on extending this algorithm to the situation where the robot simultaneously advances forward
and rotates
. Although not shown here, the algorithm described in this article is applicable to all the categories of robots shown in
Figure 4.
2.5. Software Architecture
To test the algorithm, we used the land robot SuperDroid HD2, shown in
Figure 4a. The software architecture relies on ROS [
32]. The corresponding C++ code used for our experiments is freely available on
https://github.com/StefanT83/SC_obst_avoid_GPR_1D.git (accessed on 14 September 2022) and uses three ROS topics as inputs and generates one ROS topic as output. The input ROS topics are as follows:
- (i)
/velodyne_point data, issued by the Velodyne ROS driver;
- (ii)
/joy_raw is the joypad data published by the standard joy package;
- (iii)
/wheel_odom is the odometry, computed by the default ROS packages the robot came with.
The output ROS topic was a new (virtual) joystick data,
/joy_out, computed by the shared control algorithm described in
Section 2.4. This information was subsequently being used by the robot’s
joy_teleop node and converted into a velocity command
/cmd_vel used by the
roboteq_driver.
3. Experiments
The test rig used in this study consists of a SuperDroid HD2 robot illustrated in
Figure 4a,
Figure 5b, and
Figure 6a,b, moving on concrete floor inside the mobile arena shown in
Figure 6. It was equipped with a Velodyne 3D LiDAR, ensuring perception of the environment (see
Figure 6c), which was used to measure experimentally
, the distance to the nearest obstacle. The linear velocity
v and the angular velocity of the robot were estimated using odometry, and based on measurements from motor encoders. The maximum linear velocity
was approximately 0.4 m/s, and the robot was remotely actuated using a Bluetooth joypad, specifically the Sony PlayStation DualShock 4, illustrated in the middle of
Figure 4.
In this paper, we focus on the
method of how we can build a GPR model, and then use its predictions inside the shared control algorithm. We used
one human operator, but in future work, we intend to run a more in-depth study involving more participants, enabling the statistical significance of the control solution to be compared against other approaches, such as the popular dynamic window approach, that has been implemented in ROS [
32].
3.1. Training Data for the GPR Model
We propose to
learn the characteristics of the user’s driving style in the context of the environment depicted in
Figure 6a. In the experiments, the robot is located at a standstill at an arbitrary location, facing toward an obstacle, in this case, made of cardboard boxes, and the following protocol was followed. The only instruction given to the human operator was that they should make use of their driving skills to move the robot close to the obstacle in one attempt, without colliding with it. During this procedure, we recorded the linear velocity
and kept track of the distance to the obstacle
, where
t represents time. We then recorded the initial instant of time,
, and instant of time,
, when the robot reached a standstill and stopped safely near the obstacle. Next, we marked the point
on a graphic using a cross, as in
Figure 7a. Lastly, we recorded the amount of time,
, elapsed to stop safely. The value of
can be considered to be a tuning parameter, and in this work, was set to
s. In other words, we were only interested in those experiments that lasted 4 s and disregarded the rest. This is discussed later in
Section 4. Next, we repeated the scenario above four more times and collected data from each test. In
Figure 7a, a total of five experimental data points (or noisy observations),
are illustrated by crosses. The index of the repetition, or iteration,
. The fact that so few experimental data points are needed to make the algorithm work is a major benefit of this proposed GPR-based approach.
These points were then used to build a GPR model (
4) by choosing (i) the
mean function m to be zero, translating the fact that if we extract a sample consisting of any of the
random variables that constitute the Gaussian process prior in (
3), (
4), (
5), their mean approaches zero as the size of that sample increases; this choice is typical for situations where little or no prior information about the mapping
f is available [
3,
15]; the mean value of any
random variable that constitute the Gaussian process posterior in (
6) converges to zero as the predictive location
gets further away from the collected data locations
X [
8]; (ii) the covariance function (or kernel function)
k is defined to be equal to the squared-exponential (SE) covariance function in one dimension [
16,
34]:
where
is the Kronecker delta, with
indices. The reason is that functions sampled from a GPR with a SE kernel are infinitely differentiable, and therefore very smooth, which is convenient for our application, whereas other options such as the Matern kernel produce “rougher” functions [
4,
19]. The three
hyperparameters in (
10) are as follows: (i)
Noise variance , which can be estimated using the
maximum likelihood estimate in a series of additional experiments, as follows. Fix a convenient value along the horizontal axis in
Figure 7a. Then, using a series of repetitions, collect a
sample of
v values and compute the sample variance
. Next, use this estimate in place of
in (
10). (ii)
Signal variance . (iii)
Length scale l. The last two
hyperparameters can be computed by minimizing the negative log marginal likelihood with respect to the hyperparameters [
16,
36]. Intuitively, this works by selecting the covariance function (
10) that explains best the observations.
An interesting property, which supports the use of GPR models in this work, is that the smoothness of the realizations of a GPR model can be adjusted by accurately defining the covariance function (including its parameters) [
16]. We know from our previous model-based approach [
33] that we expect the curve, expressing a safe stop maneuver, to be smooth.
3.2. Predictions from the GPR Model
Having built the GPR model, we can then use it to make predictions. Specifically, we are interested in the evolution of the process in terms of the predicted linear velocity
v over a desired
continuous range (or domain) of
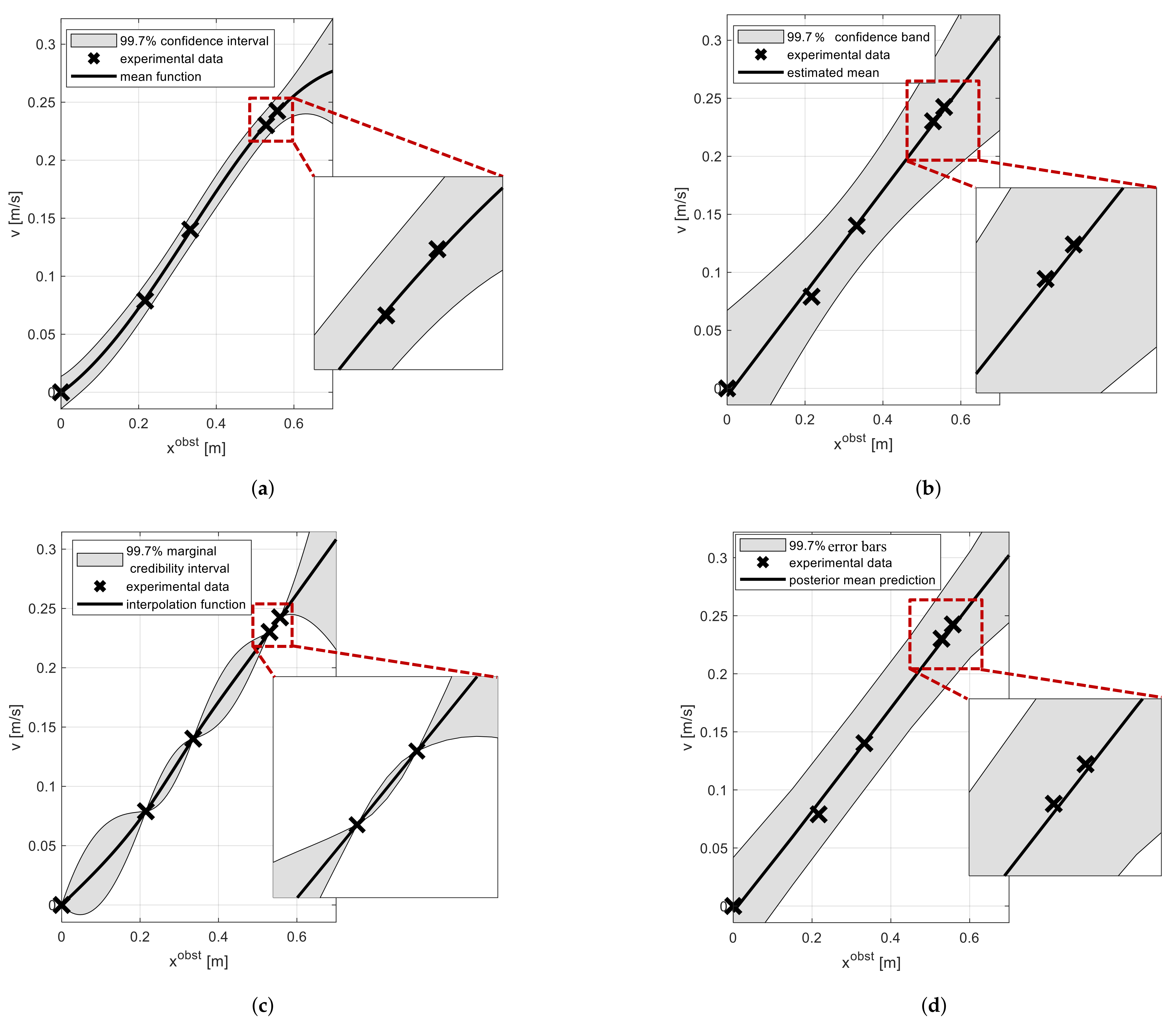
. The result is shown in
Figure 7a and consists of two pieces of information, namely the mean function (black line) and its associated 99.7% pointwise confidence interval or 3
interval (gray area), where
is the standard deviation (
9). The 99.7% value and, consequently, the factor 3 are arbitrary values that act interchangeably as tuning parameters—this is discussed later in
Section 4. The gray area illustrates the range of velocities that the GPR model believes are acceptable, relative to the distance to the obstacle
, and based on what it has learned of the user’s behavior. The next question is how can we use this information in place of the blue curve in the shared control algorithm in
Figure 5.
3.3. Personalized Shared Control
The predictions based on the GPR model in
Figure 7a integrate the features of the relationship between the operator, robot and environment into the shared controller. To be able to use this information meaningfully inside our shared controller, we rely on the assumption that the protocol used to carry out the experimental data collection for building the GPR model is consistent and relevant to the real-world scenario.
Finally, we propose to design a conservative (cautious) shared controller that is guaranteed to allow for safe stop maneuvers in 99.7% of cases; 99.7% relates to a
interval. This arbitrary value of
can be adjusted depending on how critical it is to avoid the object. For this shared control, we need to consider the lower bound curve of the confidence interval, namely
in place of the blue curve in
Figure 5. As will be discussed later in
Section 4, this curve requires minor adjustments at the extremities.
3.4. Testing
The circuit in
Figure 6b was used to drive the vehicle with the proposed shared control enabled. By analyzing the heart rate and eye blinking as psychometric measures of cognitive load [
39], we noticed their average values were different when comparing the situation with and without assistive control. Compared to the situation without any assistive control, driving was found to require less cognitive effort, or concentration, for the operator to avoid striking obstacles. The operator was thus able to focus on other higher-level tasks, such as navigating toward a desired destination point or future mission planning. In addition to that, we noticed that fewer obstacles were struck during the experiments, at the expense of a slower moving robot, which may be the price to pay for increased safety in this framework. The paper’s
Supplementary Material Video S1, also available on
https://youtu.be/6vkszxGEn50 (accessed on 14 September 2022), shows excerpts for data collection and testing the obstacle avoidance shared control algorithm, all carried out by the one experienced operator. A more elaborate statistical study with multiple participants (operators) will be conducted in the future to confirm and quantify the aforementioned observations, similar to the study in [
33].
4. Discussion
In this section, we add some comments about the proposed learning-based shared control method.
The central section of the predictions in
Figure 7a, i.e., the results between approximately
m and
m, are in agreement with the physical intuition and captures correctly the variability of the process. However, the predictions outside this region are not. According to the physics, the origin point
has no variability, i.e., its standard deviation equals zero, as the robot is at a standstill; however, the GPR does not capture this. Instead, it assumes that there is additive noise present everywhere on the latent function [
16]. In addition, the right-hand side of the prediction in
Figure 7a curves downward, and eventually, the mean function converges (falls) to zero (not shown). This is a well-known and typical behavior of a GPR in unexplored areas (regions where no experimental data have been collected), where the predictions tend toward the chosen
m in (
4), in our case to zero [
8]. Consequently, the extremities need to be corrected. In particular, we are only interested in the lower bound of the confidence interval in
Figure 7a since this is the only information used in our shared control algorithm. It is adjusted around the origin by saturating it to zero, and on the far right of
Figure 7a, we stop making use of predictions as soon the the lower bound of the confidence interval tends to bend downward (this happens around
m in
Figure 7a).
For comparison reasons, we included the results that were obtained using alternative techniques. First, the
simple linear regression [
34] in
Figure 7b, where the predicted confidence interval suffers from the same problem as GPR at the extremities. Moreover, (i) the estimated 99.7% confidence band is too wide, in the sense that for any fixed
value on the horizontal axis in
Figure 7b, we would not expect physically to collect data points
v that are so far apart as the confidence band in
Figure 7b suggests (however, by gathering more experimental data, the confidence band will tend to shrink, thus better modeling the physical variability); (ii) there is no physical reason why the
true mean would follow a straight line, which is one of the underlying assumptions of a simple linear regression model. This can potentially be overcome using, for example, polynomial regression.
We also compared the results to those obtained using an interpolation method presented in [
34], in
Figure 7c. This captures correctly the lack of variability for the stationary situation
; however, it was not able to model the variability for the other experimental data points. Finally, the results were compared to those obtained using a Bayesian neural network [
40]. These results are shown in
Figure 7d, where the neural network has a single hidden layer containing three nodes. The
posterior mean prediction converges toward a finite value of approximately
m/s (not shown in the figure), which is similar to the
mean function of the GPR model in
Figure 7a, which falls toward the constant value of
m/s. Note that the standard deviation around the posterior mean prediction in
Figure 7d can be further improved by (i) adding more data points to this automatic learning procedure, or, (ii) similar to what we did in
Section 3.1 and
Figure 7a, by manually specifying (fixing) the
noise variance hyperparameter according to experimental data (observations) and identifying the rest of the hyperparameters using the optimization procedure.
To conclude, the results presented in
Figure 7 show that the GPR model in
Figure 7a is superior to the other three stochastic models in
Figure 7b–d, as it better captures the physics of the real process.
Preliminary experiments with this shared control enabled (see
Figure 6b) give the feeling of a rather slow-moving robot. To make it advance faster, loosely speaking and appealing to the reader’s intuition, we need to “bend” the blue curve in
Figure 5 toward the left side. This can be achieved in two ways: either by reducing the desired confidence margin considered in the shared control algorithm (say from 99.7% to 95.45% or
interval, making the algorithm less conservative), and/or by choosing a smaller threshold value
, say
s. The latter would involve a new set of experiments to be performed for collecting a new training set. The downside of reducing the 99.7% value is the increased chance of colliding with obstacles. The benefit, though, is the increased level of autonomy for the operator, now able to maneuver a faster moving robot.
The obstacle avoidance shared control presented in
Section 2 is suited for usage in disaster scenes where the environment cannot be mapped before the deployment of robots. In other words, it does not need any prior knowledge about already mapped environments generated, e.g., using simultaneous mapping and localization (SLAM) techniques [
32]. In future works, the method we presented could be extended to integrate this type of environment information together with clusters of pre-trained environment-specific GPR-based models. This family of models can then be used in conjunction with the online identified environment in selecting the most adequate GPR model to be used by the control algorithm.
Future Work Plan
In our immediate future work plan, we aim to conduct a comprehensive study involving the use of confidence metrics within a robot’s control system. In that work, we will compare the proposed GPR-based method against other stochastic methods, as well as demonstrating the benefits that stochastic techniques offer over deterministic techniques.








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}






