

Design of a Lightweight and Deployable Soft Robotic Arm




Abstract
:1. Introduction
2. Project Objectives
3. System Design
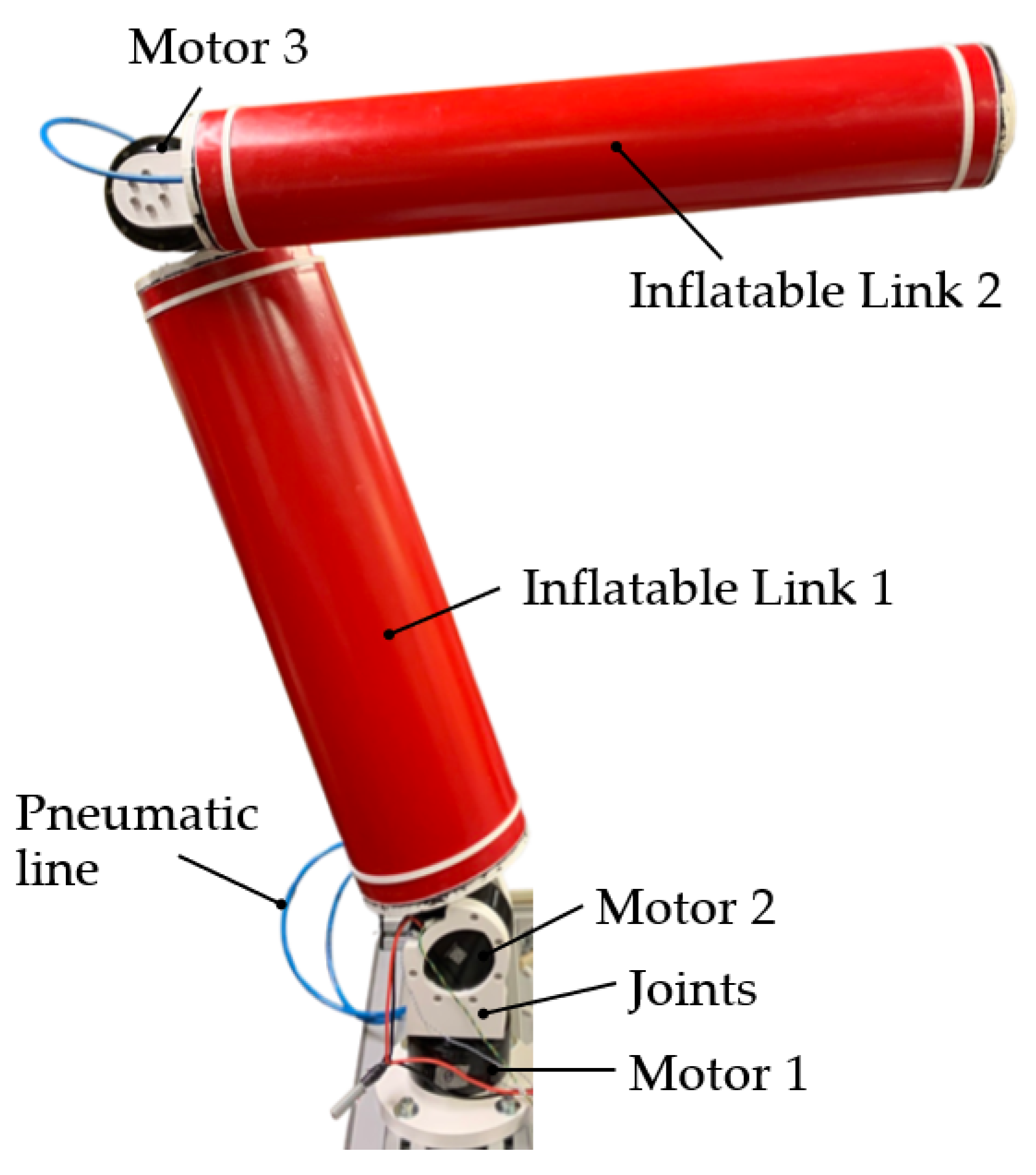
3.1. Mechanical Design
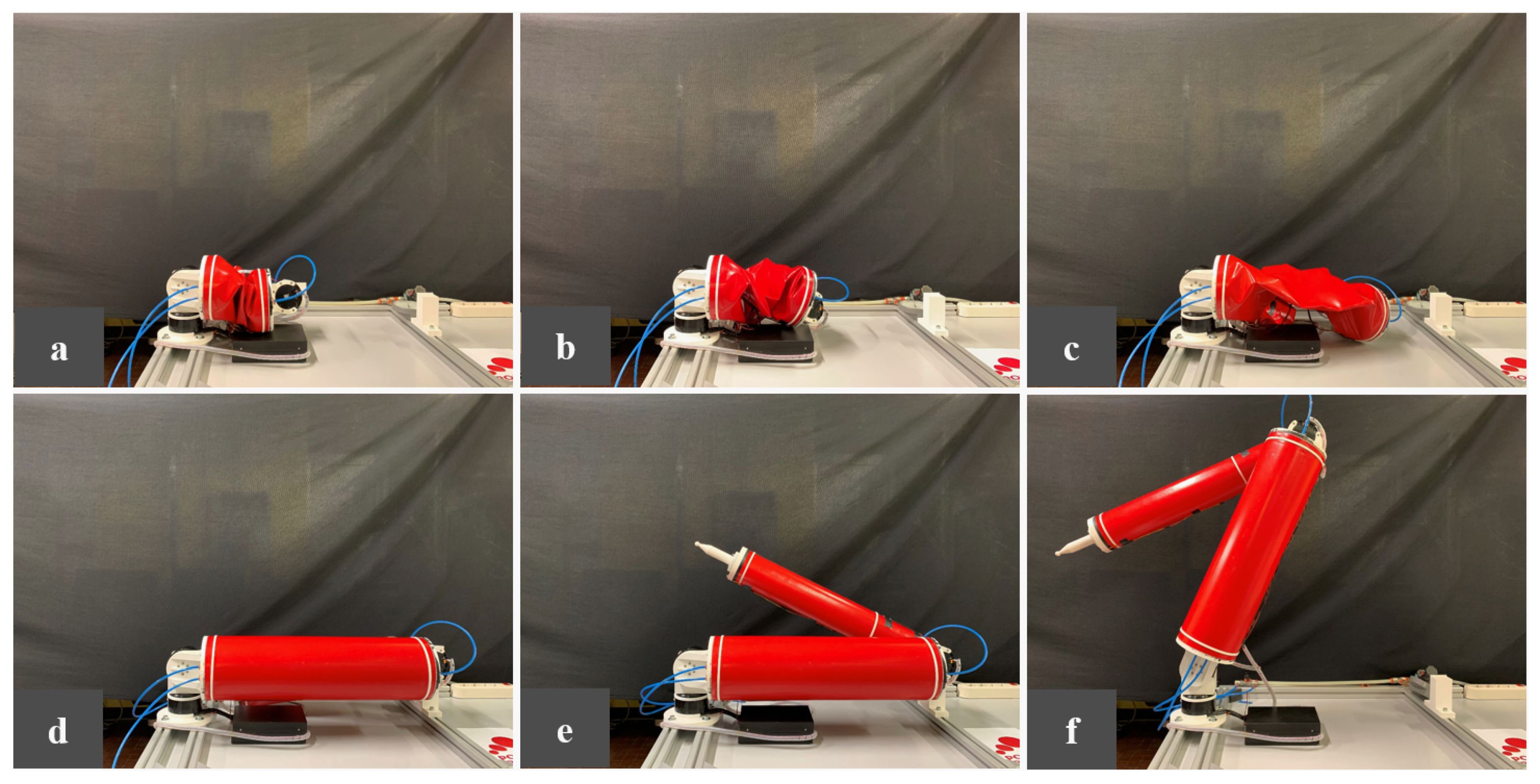
3.2. Pneumatic Line and Deployment
3.3. Sensors and Control Strategy Concept
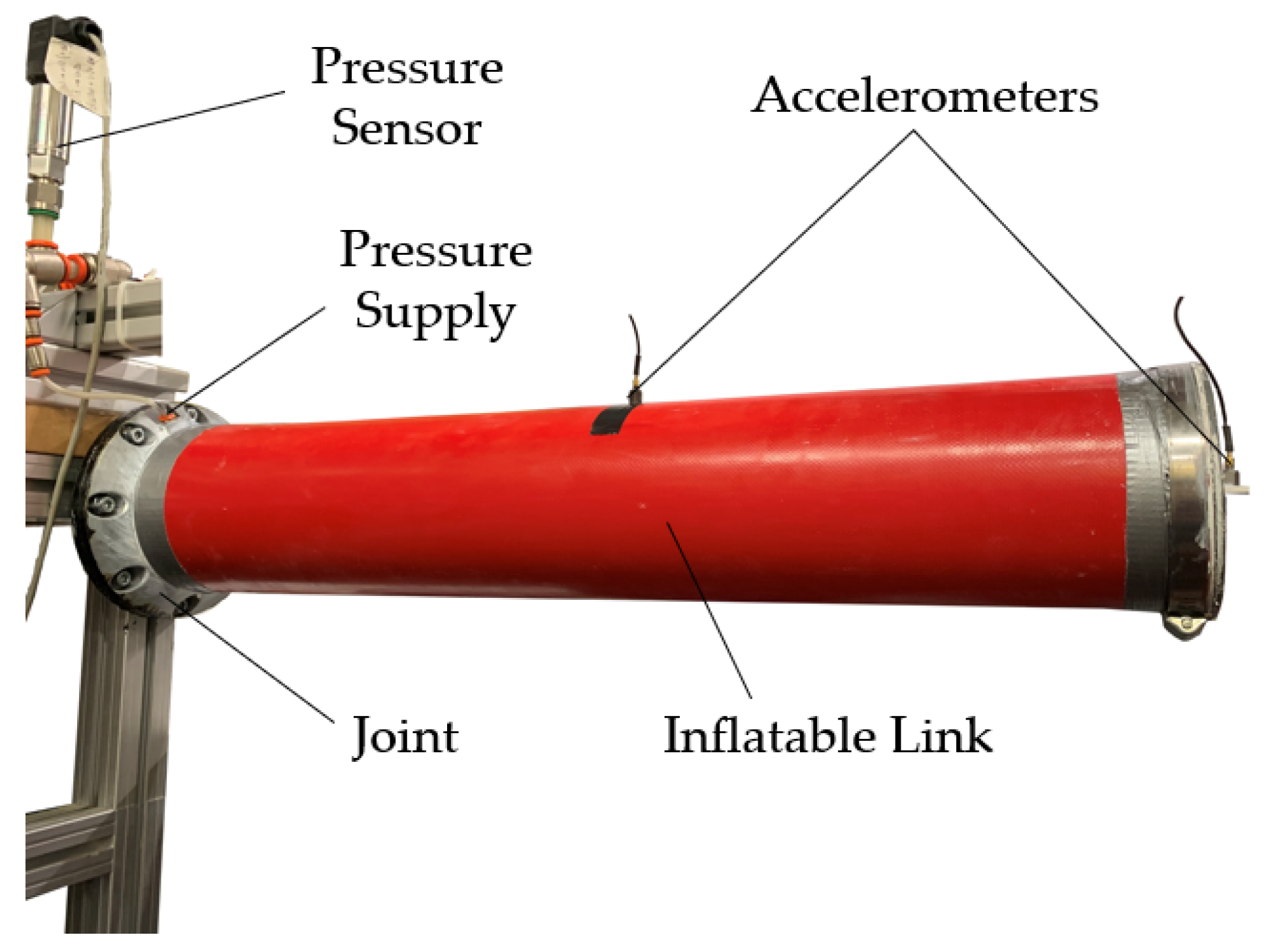
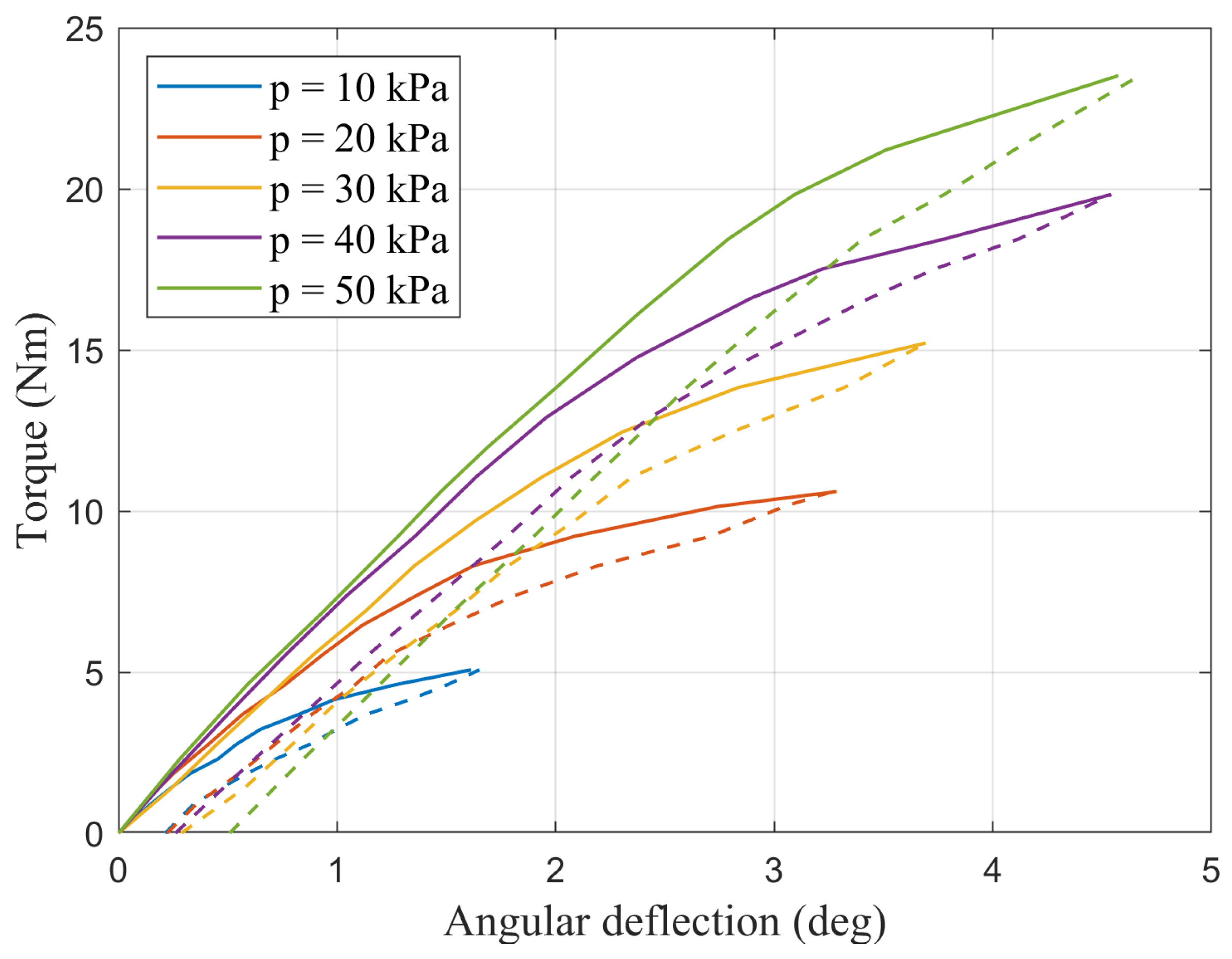
4. Inflatable Link Model and Experimental Tests
Experiments
5. Robot Modeling and Simulation
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| IAE | Inflatable Antenna Experiment |
| IRA | Inflatable robotic arm |
| PAM | Pneumatic artificial muscle |
| MPC | Model predictive control |
| LQR | Linear quadratic regulation |
| SMC | Sliding mode control |
| HRC | Human-robot collaboration |
| AMM | Assumed mode method |
| FEM | Finite element method |
| DOF | Degrees of freedom |
| MMOD | Micrometeoroids and orbital debris |
| EE | End-effector |
| RV | Reducing valve |
| PT | Pressure transducer |
| IMU | Inertial measurement unit |
| PRBM | Pseudo-rigid body model |
| RBM | Rigid body model |
| PSD | Power spectral density |
| FRF | Frequency response function |
| D-H | Denavit-Hartenberg |
| VS | Visual servoing |
References
- Chen, F.; Wang, M.Y. Design optimization of soft robots: A review of the state of the art. IEEE Robot. Autom. Mag. 2020, 27, 27–43. [Google Scholar] [CrossRef]
- Laschi, C.; Mazzolai, B.; Cianchetti, M. Soft robotics: Technologies and systems pushing the boundaries of robot abilities. Sci. Robot. 2016, 1, eaah3690. [Google Scholar] [CrossRef] [PubMed]
- Methenitis, G.; Hennes, D.; Izzo, D.; Visser, A. Novelty search for soft robotic space exploration. In Proceedings of the 2015 Annual Conference on Genetic and Evolutionary Computation, Madrid, Spain, 11–15 July 2015; pp. 193–200. [Google Scholar]
- Qi, R.; Khajepour, A.; Melek, W.W.; Lam, T.L.; Xu, Y. Design, kinematics, and control of a multijoint soft inflatable arm for human-safe interaction. IEEE Trans. Robot. 2017, 33, 594–609. [Google Scholar] [CrossRef]
- Hofer, M.; D’Andrea, R. Design, fabrication, modeling and control of a fabric-based spherical robotic arm. Mechatronics 2020, 68, 102369. [Google Scholar] [CrossRef]
- Ataka, A.; Abrar, T.; Putzu, F.; Godaba, H.; Althoefer, K. Model-based pose control of inflatable eversion robot with variable stiffness. IEEE Robot. Autom. Lett. 2020, 5, 3398–3405. [Google Scholar] [CrossRef]
- Kim, S.; Laschi, C.; Trimmer, B. Soft robotics: A bioinspired evolution in robotics. Trends Biotechnol. 2013, 31, 287–294. [Google Scholar] [CrossRef]
- Yamaguchi, D.; Hanaki, T.; Ishino, Y.; Takasaki, M.; Mizuno, T. Fabrication of a Polyimide Film Pneumatic Actuator by Molding and Welding Processes. Actuators 2021, 10, 177. [Google Scholar] [CrossRef]
- Hughes, J.; Culha, U.; Giardina, F.; Guenther, F.; Rosendo, A.; Iida, F. Soft manipulators and grippers: A review. Front. Robot. AI 2016, 3, 69. [Google Scholar] [CrossRef]
- Oliveira, J.; Ferreira, A.; Reis, J.C. Design and experiments on an inflatable link robot with a built-in vision sensor. Mechatronics 2020, 65, 102305. [Google Scholar] [CrossRef]
- Gillespie, M.T.; Best, C.M.; Killpack, M.D. Simultaneous position and stiffness control for an inflatable soft robot. In Proceedings of the 2016 IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Sweden, 16–21 May 2016; pp. 1095–1101. [Google Scholar]
- Diftler, M.; Ahlstrom, T.; Ambrose, R.; Radford, N.; Joyce, C.; De La Pena, N.; Parsons, A.; Noblitt, A. Robonaut 2—Initial activities on-board the ISS. In Proceedings of the 2012 IEEE Aerospace Conference, Big Sky, MT, USA, 3–10 March 2012; pp. 1–12. [Google Scholar]
- Schenker, P.S. Advances in rover technology for space exploration. In Proceedings of the 2006 IEEE Aerospace Conference, Big Sky, MT, USA, 4–11 March 2006; p. 23. [Google Scholar]
- Sujan, V.A.; Dubowsky, S. Design of a lightweight hyper-redundant deployable binary manipulator. J. Mech. Des. 2004, 126, 29–39. [Google Scholar] [CrossRef]
- Cadogan, D.; Stein, J.; Grahne, M. Inflatable composite habitat structures for lunar and mars exploration. Acta Astronaut. 1999, 44, 399–406. [Google Scholar] [CrossRef]
- Freeland, R.; Bilyeu, G.; Veal, G.; Steiner, M.; Carson, D. Large inflatable deployable antenna flight experiment results. Acta Astronaut. 1997, 41, 267–277. [Google Scholar] [CrossRef]
- Malone, P.K.; Williams, G.T. Lightweight inflatable solar array. J. Propuls. Power 1996, 12, 866–872. [Google Scholar] [CrossRef]
- Chandra, A.; Thangavelautham, J. Modular inflatable composites for space telescopes. In Proceedings of the 2019 IEEE Aerospace Conference, Big Sky, MT, USA, 2–9 March 2019; pp. 1–9. [Google Scholar]
- Webster, R.J., III; Jones, B.A. Design and kinematic modeling of constant curvature continuum robots: A review. Int. J. Robot. Res. 2010, 29, 1661–1683. [Google Scholar] [CrossRef]
- Chirikjian, G.; Burdick, J. The kinematics of hyper-redundant robot locomotion. IEEE Trans. Robot. Autom. 1995, 11, 781–793. [Google Scholar] [CrossRef]
- De Luca, A.; Book, W.J. Robots with flexible elements. In Springer Handbook of Robotics; Springer: Berlin/Heidelberg, Germany, 2016; pp. 243–282. [Google Scholar]
- Sanan, S.; Moidel, J.B.; Atkeson, C.G. Robots with inflatable links. In Proceedings of the 2009 IEEE/RSJ International Conference on Intelligent Robots and Systems, St. Louis, MO, USA, 10–15 October 2009; pp. 4331–4336. [Google Scholar]
- Raviola, A.; Martin, A.D.; Guida, R.; Pastorelli, S.; Mauro, S.; Sorli, M. Identification of a UR5 Collaborative Robot Dynamic Parameters. In Proceedings of the International Conference on Robotics in Alpe-Adria Danube Region, Poitiers, France, 21–23 June 2021; pp. 69–77. [Google Scholar]
- Raviola, A.; Guida, R.; De Martin, A.; Pastorelli, S.; Mauro, S.; Sorli, M. Effects of temperature and mounting configuration on the dynamic parameters identification of industrial robots. Robotics 2021, 10, 83. [Google Scholar] [CrossRef]
- Li, X.; Sun, K.; Guo, C.; Liu, T.; Liu, H. Design, modeling and characterization of a joint for inflatable robotic arms. Mechatronics 2020, 65, 102311. [Google Scholar] [CrossRef]
- Best, C.M.; Wilson, J.P.; Killpack, M.D. Control of a pneumatically actuated, fully inflatable, fabric-based, humanoid robot. In Proceedings of the 2015 IEEE-RAS 15th International Conference on Humanoid Robots (Humanoids), Seoul, Korea, 3–5 November 2015; pp. 1133–1140. [Google Scholar]
- Best, C.M.; Rupert, L.; Killpack, M.D. Comparing model-based control methods for simultaneous stiffness and position control of inflatable soft robots. Int. J. Robot. Res. 2021, 40, 470–493. [Google Scholar] [CrossRef]
- Mattiazzo, G.; Mauro, S.; Raparelli, T.; Velardocchia, M. Control of a six-axis pneumatic robot. J. Robot. Syst. 2002, 19, 363–378. [Google Scholar] [CrossRef]
- Giorelli, M.; Renda, F.; Calisti, M.; Arienti, A.; Ferri, G.; Laschi, C. Neural Network and Jacobian Method for Solving the Inverse Statics of a Cable-Driven Soft Arm with Nonconstant Curvature. IEEE Trans. Robot. 2015, 31, 823–834. [Google Scholar] [CrossRef]
- Machkour, Z.; Ortiz-Arroyo, D.; Durdevic, P. Classical and Deep Learning based Visual Servoing Systems: A Survey on State of the Art. J. Intell. Robot. Syst. 2022, 104, 11. [Google Scholar] [CrossRef]
- Xu, F.; Wang, H.; Chen, W.; Miao, Y. Visual Servoing of a Cable-Driven Soft Robot Manipulator With Shape Feature. IEEE Robot. Autom. Lett. 2021, 6, 4281–4288. [Google Scholar] [CrossRef]
- Fang, G.; Wang, X.; Wang, K.; Lee, K.H.; Ho, J.D.L.; Fu, H.C.; Fu, D.K.C.; Kwok, K.W. Vision-Based Online Learning Kinematic Control for Soft Robots Using Local Gaussian Process Regression. IEEE Robot. Autom. Lett. 2019, 4, 1194–1201. [Google Scholar] [CrossRef]
- Kunkelmoor, J.; Mercorelli, P. Design of a Real Time Path of Motion Using a Sliding Mode Control with a Switching Surface. In Advanced, Contemporary Control; Springer International Publishing: Cham, Switzerland, 2020; pp. 197–206. [Google Scholar]
- Scimmi, L.S.; Melchiorre, M.; Mauro, S.; Pastorelli, S.P. Implementing a vision-based collision avoidance algorithm on a UR3 Robot. In Proceedings of the 2019 23rd International Conference on Mechatronics Technology (ICMT), Salerno, Italy, 23–26 October 2019; pp. 1–6. [Google Scholar]
- Mauro, S.; Pastorelli, S.; Scimmi, L.S. Collision Avoidance Algorithm for Collaborative Robotics. Int. J. Autom. Technol. 2017, 11, 481–489. [Google Scholar] [CrossRef]
- Palmieri, P.; Melchiorre, M.; Scimmi, L.S.; Pastorelli, S.; Mauro, S. Human Arm Motion Tracking by Kinect Sensor Using Kalman Filter for Collaborative Robotics. Mech. Mach. Sci. 2021, 91, 326–334. [Google Scholar]
- Scimmi, L.S.; Melchiorre, M.; Mauro, S.; Pastorelli, S. Multiple Collision Avoidance between Human Limbs and Robot Links Algorithm in Collaborative Tasks. In Proceedings of the ICINCO (2), Porto, Portugal, 29–31 July 2018; pp. 301–308. [Google Scholar]
- Melchiorre, M.; Scimmi, L.S.; Pastorelli, S.P.; Mauro, S. Collison avoidance using point cloud data fusion from multiple depth sensors: A practical approach. In Proceedings of the 2019 23rd International Conference on Mechatronics Technology (ICMT), Salerno, Italy, 23–26 October 2019; pp. 1–6. [Google Scholar]
- Scimmi, L.S.; Melchiorre, M.; Troise, M.; Mauro, S.; Pastorelli, S. A practical and effective layout for a safe human-robot collaborative assembly task. Appl. Sci. 2021, 11, 1763. [Google Scholar] [CrossRef]
- Sanan, S.; Ornstein, M.H.; Atkeson, C.G. Physical human interaction for an inflatable manipulator. In Proceedings of the 2011 Annual International Conference of the IEEE Engineering in Medicine and Biology Society, Boston, MA, USA, 30 August–3 September 2011; pp. 7401–7404. [Google Scholar]
- Pang, G.; Deng, J.; Wang, F.; Zhang, J.; Pang, Z.; Yang, G. Development of Flexible Robot Skin for Safe and Natural Human–Robot Collaboration. Micromachines 2018, 9, 576. [Google Scholar] [CrossRef]
- Jørgensen, J.; Bojesen, K.B.; Jochum, E. Is a Soft Robot More “Natural”? Exploring the Perception of Soft Robotics in Human–Robot Interaction. Int. J. Soc. Robot. 2022, 14, 95–113. [Google Scholar] [CrossRef]
- Troise, M.; Gaidano, M.; Palmieri, P.; Mauro, S. Preliminary Analysis of a Lightweight and Deployable Soft Robot for Space Applications. Appl. Sci. 2021, 11, 2558. [Google Scholar] [CrossRef]
- Palmieri, P.; Gaidano, M.; Troise, M.; Salamina, L.; Ruggeri, A.; Mauro, S. A deployable and inflatable robotic arm concept for aerospace applications. In Proceedings of the IEEE International Workshop on Metrology for AeroSpace, MetroAeroSpace 2021, Naples, Italy, 23–25 June 2021; pp. 453–458. [Google Scholar]
- Palmieri, P.; Gaidano, M.; Ruggeri, A.; Salamina, L.; Troise, M.; Mauro, S. An Inflatable Robotic Assistant for Onboard Applications. In Proceedings of the International Astronautical Congress, IAC, Dubai, United Arab Emirates, 25–29 October 2021; Volume A5, pp. 25–29. [Google Scholar]
- Chu, A.M.; Nguyen, C.D.; Duong, X.B.; Nguyen, A.V.; Nguyen, T.A.; Le, C.H.; Packianather, M. A novel mathematical approach for finite element formulation of flexible robot dynamics. Mech. Based Des. Struct. Mach. 2020, 1–21. [Google Scholar] [CrossRef]
- Aikenhead, B.A.; Daniell, R.G.; Davis, F.M. Canadarm and the space shuttle. J. Vac. Sci. Technol. A 1983, 1, 126–132. [Google Scholar] [CrossRef]
- Veldman, S.L. Design and Analysis Methodologies for Inflated Beams; Delft University Press: Delft, The Netherlands, 2005. [Google Scholar]
- Wielgosz, C.; Thomas, J.C. Deflections of inflatable fabric panels at high pressure. Thin-Walled Struct. 2002, 40, 523–536. [Google Scholar] [CrossRef]
- Kalman, R. A new approach to linear filtering and prediction problems. J. Basic Eng. 1960, 82, 34–45. [Google Scholar] [CrossRef] [Green Version]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| p (kPa) | (Hz) | (Nms/rad) | k (Nm/rad) | (Nm/rad) |
|---|---|---|---|---|
| 10 | 15.04 | 0.557 | 296 | 321 |
| 20 | 15.63 | 0.547 | 346 | 347 |
| 30 | 15.94 | 0.463 | 348 | 360 |
| 40 | 16.17 | 0.450 | 389 | 370 |
| 50 | 16.44 | 0.433 | 407 | 382 |
| 60 | 16.56 | 0.429 | N/A | 388 |
| 70 | 16.65 | 0.412 | N/A | 392 |
| 80 | 16.83 | 0.407 | N/A | 401 |
| 90 | 16.93 | 0.406 | N/A | 405 |
| Link | (mm) | (rad) | (mm) | (rad) |
|---|---|---|---|---|
| 0 | 0 | 152.70 | ||
| 1 | 94 | 39.35 | ||
| 1.1 | 0 | 0 | ||
| 1.2 | 634 | 0 | ||
| 2 | 94 | 157.80 | ||
| 2.1 | 0 | 0 | ||
| 2.2 | 590 | 0 | 0 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Palmieri, P.; Melchiorre, M.; Mauro, S. Design of a Lightweight and Deployable Soft Robotic Arm. Robotics 2022, 11, 88. https://doi.org/10.3390/robotics11050088
Palmieri P, Melchiorre M, Mauro S. Design of a Lightweight and Deployable Soft Robotic Arm. Robotics. 2022; 11(5):88. https://doi.org/10.3390/robotics11050088
Chicago/Turabian StylePalmieri, Pierpaolo, Matteo Melchiorre, and Stefano Mauro. 2022. "Design of a Lightweight and Deployable Soft Robotic Arm" Robotics 11, no. 5: 88. https://doi.org/10.3390/robotics11050088
APA StylePalmieri, P., Melchiorre, M., & Mauro, S. (2022). Design of a Lightweight and Deployable Soft Robotic Arm. Robotics, 11(5), 88. https://doi.org/10.3390/robotics11050088