
Augmented and Virtual Reality Experiences for Learning Robotics and Training Integrative Thinking Skills



Abstract
:1. Introduction
1.1. Augmented Reality in Education
1.2. Augmented Reality in Engineering Education and Robotics
1.3. Learning with Understanding
1.4. Integrative Thinking
2. Materials and Methods
2.1. Research Goal and Questions
- Did the students, involved in the online augmented and virtual reality experiences with robot systems, develop an understanding of the systems?
- How did the students evaluate the contribution of augmented and virtual reality experiences to training integrative thinking skills?
2.2. Method
2.3. The Workshop Intentions
- Provide student practice with modern robots using the online environment that we developed based on the AR and VR technologies.
- Facilitate learning of a complex robot system, in which students discover the principles of operation of its components and do not take them as black boxes.
- Offer opportunities for training integrative thinking skills through practice with the robot systems.
- Help students to understand the essence of the technological transformation brought by the Fourth Industrial Revolution and the learning opportunities it brings.
- Test a possible implementation of the above intentions in a short-term online workshop.
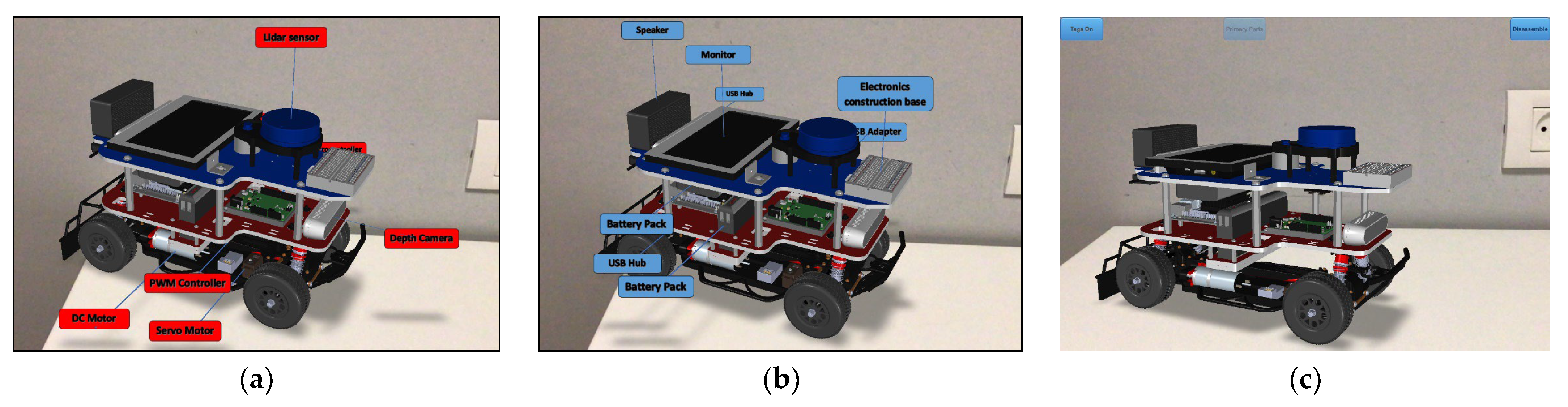
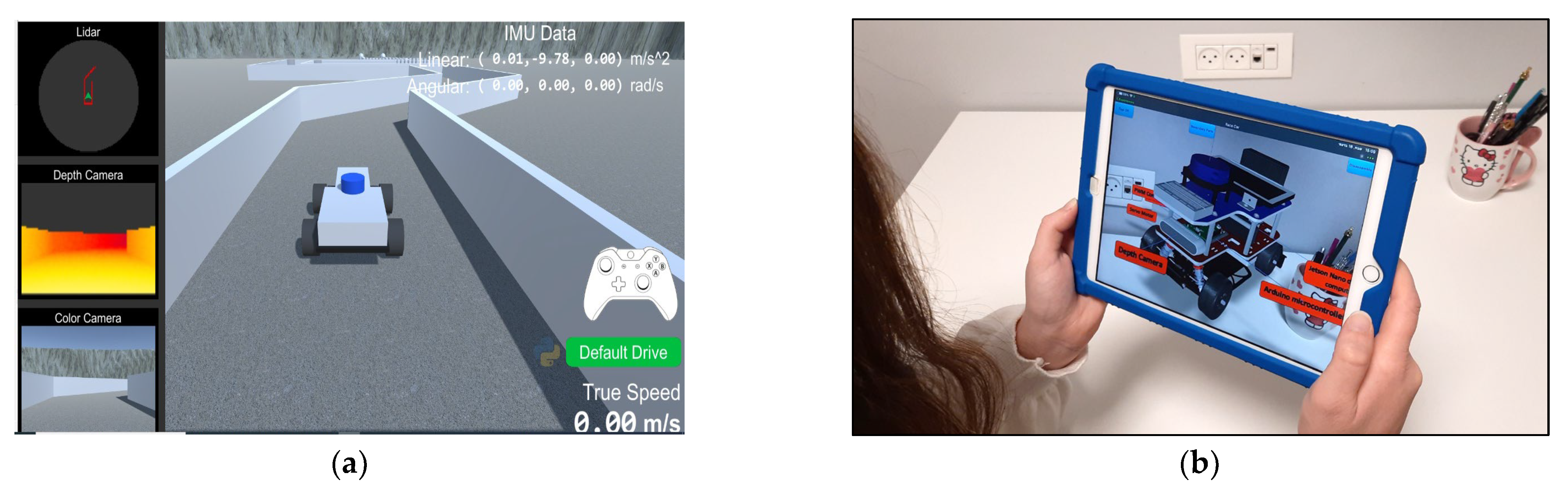
2.4. AR Experience with RACECAR MN
2.4.1. Creating a 3D Model of the RACECAR MN
2.4.2. Creating the Animations
2.4.3. Creating the AR Experience
2.5. The Robotics Workshop
2.6. Evaluation of Learning Outcomes
2.6.1. Data Collection
- If the on-time of the pulses increases and the duty cycle decreases, then the speed of the motor increases.
- If the on-time of the pulses decreases and the duty cycle increases, then the speed of the motor increases.
- If the on-time of the pulses decreases and the duty cycle remains the same, then the speed of the motor decreases.
- If the on-time of the pulses remains the same and the duty cycle increases, then the speed of the motor decreases.
2.6.2. Data Analysis
3. Results
3.1. Workshop Assignments
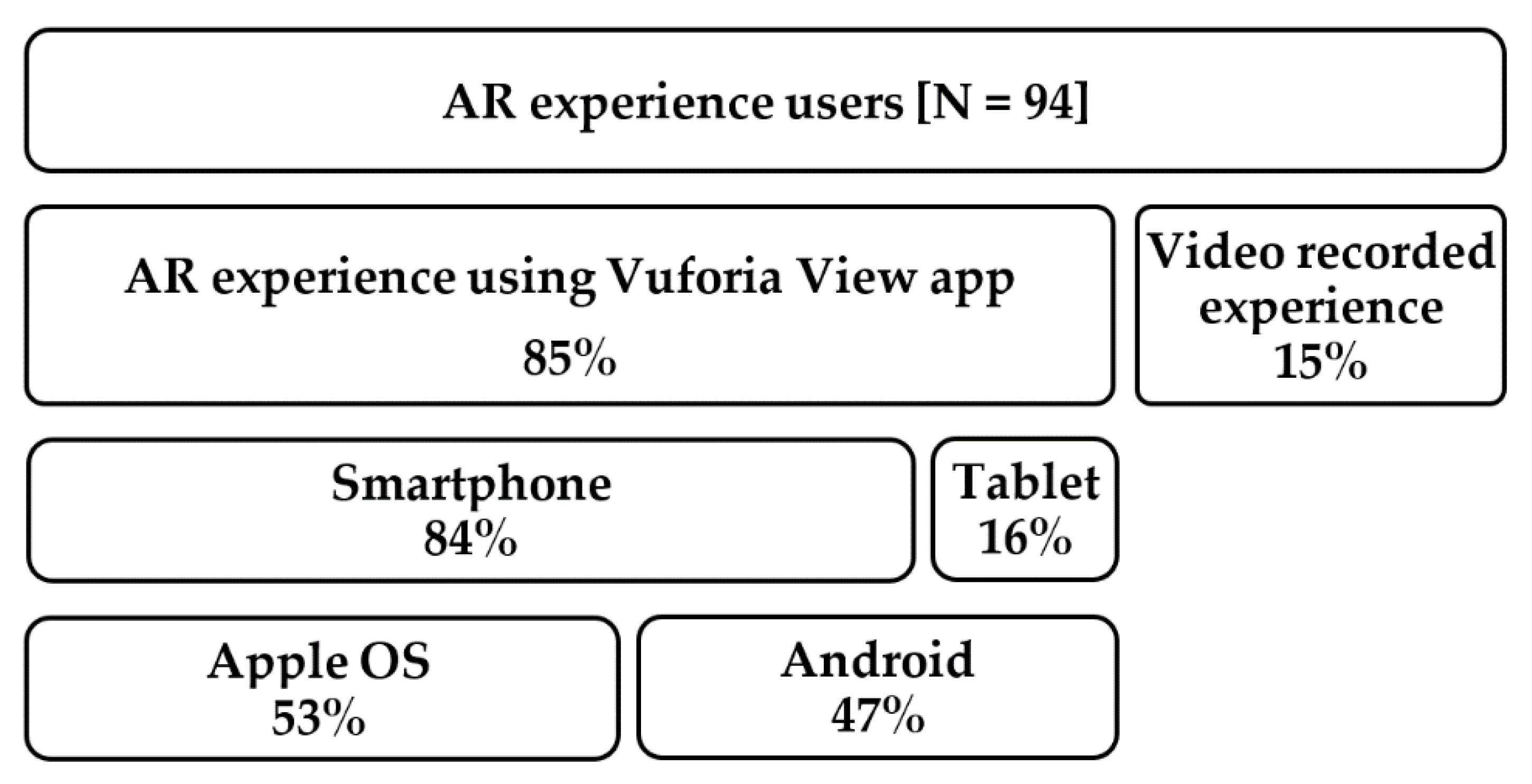
3.2. Technological Tools
3.3. AR/VR Experience
“The AR experiences helped us understand the robot structure and components much better than the verbal explanations.”
“Using AR, we were able to observe from different angles how the robots are built, just as if we were looking at them in real life. In addition, the explanation given for each component helped to understand the robot better.”
“By observing the robot being disassembled into parts and then being reassembled, we were able to better understand the relationships between the different components and their functions.”
“Interesting simulation! Through it, we understood the importance of each of the sensors and their meaning.”
“Working on the simulator helped us better understand the different components, such as the laser sensor and the distance camera.”
“Augmented reality allowed me to get to know the components well, but if they could be physically handled, connected, and disconnected, that would be a great improvement.”
3.4. Difficulties in AR/VR Experience
“I think we need more prior knowledge of the parts that are building the robot. I don’t know about motors, etc., so the issue was difficult for me.”
“It is difficult to understand on a small screen of a cellphone where each part connects.”
“It was difficult to understand what each component was because they are all black.”
“Because the explanatory labels were absent, it was difficult to understand how the parts were connecting.”
3.5. Contribution to Understanding Robot Structure
3.6. Understanding Robots as Integrated Systems
“The workshop gave me a lot of practice in integrative thinking.”
“The workshop helped me a lot in understanding the whole subject since I did not have knowledge about robots before. I could see the robot falling apart and how it connects. What each part is and to what category it belongs.”
“As I observed the decomposition and assembly of the robots, I gained a better understanding of the relationships among the different components and their functions.”
“By experimenting with the robots and exploring most of their parts, we were able to generate more general ideas, such as how larger and more useful robots work, how they are operated, and what their basic parts are. Thus, the private experience with a small number of robots has contributed to understanding general ideas related to other robots.”
“The experience has made me think about the solutions robots can offer in many different areas, and about streamlining the processes that using robots can bring.”
3.7. Student Evaluations Compared
4. Discussion
5. Conclusions
- Develop innovative technology-rich learning environments accessible for different types of experiential practice with instructional models of modern robots.
- Transform learning activities that treat robots as black boxes into ones in which students explore the robot’s architecture and functionality and use it as a platform for making.
- Prioritize learning activities that foster the cognitive and social skills required for the use and development of modern engineering systems.
- Develop new programs in educational robotics based on the understanding of its central role in preparing students for life in the modern technological world.
- Perform the assessment of learning outcomes, based on students’ progress in both knowledge and skills, an integral part of educational robotics programs.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Huber, A.M.; Waxman, L.K.; Dyar, C. Using systems thinking to understand the evolving role of technology in the design process. Int. J. Technol. Des. Educ. 2022, 32, 447–477. [Google Scholar] [CrossRef]
- Zhou, N.N.; Deng, Y.L. Virtual reality: A state-of-the-art survey. Int. J. Autom. Comput. 2009, 6, 319–325. [Google Scholar] [CrossRef]
- Gorman, D.; Hoermann, S.; Lindeman, R.W.; Shahri, B. Using virtual reality to enhance food technology education. Int. J. Technol. Des. Educ. 2022, 32, 1659–1677. [Google Scholar] [CrossRef] [PubMed]
- Hoenig, W.; Milanes, C.; Scaria, L.; Phan, T.; Bolas, M.; Ayanian, N. Mixed reality for robotics. In Proceedings of the 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Hamburg, Germany, 28 September–2 October 2015. [Google Scholar]
- Song, P.; Yu, H.; Winkler, S. Vision-based 3D finger interactions for mixed reality games with physics simulation. In Proceedings of the ACM SIGGRAPH International Conference on Virtual Reality Continuum and Its Applications in Industry, Singapore, 8–9 December 2008. [Google Scholar]
- Ozdemir, M.; Sahin, C.; Arcagok, S.; Demir, M.K. The effect of augmented reality applications in the learning process: A meta-analysis study. Eurasian J. Educ. Res. 2018, 18, 165–186. [Google Scholar] [CrossRef]
- Thees, M.; Kapp, S.; Strzys, M.P.; Beil, F.; Lukowicz, P.; Kuhn, J. Effects of augmented reality on learning and cognitive load in university physics laboratory courses. Comput. Hum. Behav. 2020, 108, 106316. [Google Scholar] [CrossRef]
- Altmeyer, K.; Kapp, S.; Thees, M.; Malone, S.; Kuhn, J.; Brünken, R. The use of augmented reality to foster conceptual knowledge acquisition in STEM laboratory courses—Theoretical background and empirical results. Br. J. Educ. Technol. 2020, 51, 611–628. [Google Scholar] [CrossRef]
- Singh, G.; Mantri, A.; Sharma, O.; Dutta, R.; Kaur, R. Evaluating the impact of the augmented reality learning environment on electronics laboratory skills of engineering students. Comput. Appl. Eng. Educ. 2019, 27, 1361–1375. [Google Scholar] [CrossRef]
- AlNajdi, S.; Alrashidi, M.; Almohamadi, K. The effectiveness of using augmented reality (AR) on assembling and exploring educational mobile robot in pedagogical virtual machine. Interact. Learn. Environ. 2020, 28, 964–990. [Google Scholar] [CrossRef]
- Borrero, A.; Márquez, J. A pilot study of the effectiveness of augmented reality to enhance the use of remote labs in electrical engineering education. J. Sci. Educ. Technol. 2012, 21, 540–557. [Google Scholar] [CrossRef]
- Verner, I.; Cuperman, D.; Polishuk, A. Inservice teachers explore RACECAR MN in physical and augmented environments. In Proceedings of the 2022 17th Annual System of Systems Engineering Conference (SOSE), Rochester, NY, USA, 7–11 June 2022; pp. 228–230. [Google Scholar]
- TurtleBot2. Open-Source Robot Development Kit. Available online: https://www.turtlebot.com/turtlebot2/ (accessed on 28 August 2022).
- MITLL RACECAR-MN. Available online: https://mitll-racecar-mn.readthedocs.io/en/latest/ (accessed on 28 August 2022).
- Wang, X.; Mayer, R.E.; Zhou, P.; Lin, L. Benefits of interactive graphic organizers in online learning: Evidence for generative learning theory. J. Educ. Psychol. 2021, 113, 1024–1037. [Google Scholar] [CrossRef]
- Clark, D.; Linn, M.C. Designing for knowledge integration: The impact of instructional time. J. Learn. Sci. 2003, 12, 451–493. [Google Scholar] [CrossRef]
- Ausubel, D.P. A subsumption theory of meaningful verbal learning and retention. J. Gen. Psychol. 1962, 66, 213–224. [Google Scholar] [CrossRef] [PubMed]
- De Weck, O.L.; Roos, D.; Magee, C.L. Engineering Systems: Meeting Human Needs in a Complex Technological World; MIT Press: Cambridge, MA, USA, 2011; pp. 168–184. [Google Scholar]
- Shen, Z.; Zhu, Y. Complex engineering system learning through study of engineering failure cases using 3D animations. In Proceedings of the ASEE 2011 Annual Conference and Exposition, Vancouver, BC, Canada, 26–29 June 2011. [Google Scholar]
- Schörger, D.; Sewchurran, K. Towards an interpretive measurement framework to assess the levels of integrated and integrative thinking within organizations. Risk Gov. Control Financ. Mark. Inst. 2015, 5, 44–66. [Google Scholar]
- Kallio, E. Integrative thinking is the key: An evaluation of current research into the development of adult thinking. Theory Psychol. 2011, 21, 785–801. [Google Scholar] [CrossRef]
- Martin, R.L. The Opposable Mind: How Successful Leaders Win through Integrative Thinking; Harvard Business School Publishing: Boston, MA, USA, 2009. [Google Scholar]
- Tynjälä, P.; Kallio, E.K.; Heikkinen, H.L. Professional expertise, integrative thinking, wisdom, and phronesis. In Development of Adult Thinking, 1st ed.; Routledge: London, UK, 2020; pp. 156–174. [Google Scholar]
- Qadir, J.; Yau, K.L.A.; Imran, M.A.; Al-Fuqaha, A. Engineering education, moving into 2020s: Essential competencies for effective 21st century electrical & computer engineers. In Proceedings of the 2020 IEEE Frontiers in Education Conference (FIE), Uppsala, Sweden, 21–24 October 2022. [Google Scholar]
- Quigley, M.; Conley, K.; Gerkey, B.; Faust, J.; Foote, T.; Leibs, J.; Wheeler, R.; Ng, A.Y. ROS: An open-source robot operating system. In Proceedings of the ICRA Workshop on Open-Source Software, Kobe, Japan, 12–13 May 2009. [Google Scholar]
- Pasek, Z.J. Helping engineers develop and exercise creative muscles. In Proceedings of the Canadian Engineering Education Association Conference (CEEA), Toronto, ON, Canada, 4–7 June 2017. [Google Scholar]
- Berlin, N.; Tavani, J.L.; Beasançon, M. An exploratory study of creativity, personality, and schooling achievement. Educ. Econ. 2016, 24, 536–556. [Google Scholar] [CrossRef]
- Malik, A.; Setiawan, A. The development of higher order thinking laboratory to improve transferable skills of students. In Proceedings of the 2015 International Conference on Innovation in Engineering and Vocational Education, Bandung, Indonesia, 14 November 2015. [Google Scholar]
- Asok, D.; Abirami, A.M.; Angeline, N.; Lavanya, R. Active learning environment for achieving higher-order thinking skills in engineering education. In Proceedings of the 2016 IEEE 4th International Conference on MOOCs, Innovation and Technology in Education (MITE), Innovation, and Technology in Education (MITE), Madurai, India, 9–10 December 2016. [Google Scholar]
- Rawat, K.S.; Massiha, G.H. A hands-on laboratory-based approach to undergraduate robotics education. In Proceedings of the IEEE International Conference on Robotics and Automation, New Orleans, LA, USA, 26 Apr–1 May 2004. [Google Scholar]
- Cuperman, D.; Verner, I.; Perez, H.; Gamer, S.; Polishuk, A. Fostering integrative thinking through an online AR-based robot system analysis. In Proceedings of the World Engineering Education Forum, Madrid, Spain, 15–18 November 2021. [Google Scholar]
- Ortega, P.E.; Lagoudas, M.Z.; Froyd, J.E. Overview and comparison of assessment tools for integrative thinking. In Proceedings of the 2017 ASEE Annual Conference & Exposition, Columbus, OH, USA, 24–28 June 2017. [Google Scholar]
- Kraiger, K.; Ford, J.K.; Salas, E. Application of cognitive, skill-based, and affective theories of learning outcomes to new methods of training evaluation. Int. J. Appl. Psychol. 1993, 78, 311–328. [Google Scholar] [CrossRef]
- Verner, I.M.; Gamer, S. Robotics laboratory classes for spatial training of novice engineering students. Int. J. Eng. Educ. 2015, 31, 1376–1388. [Google Scholar]
- Verner, I.; Cuperman, D.; Gamer, S.; Polishuk, A. Exploring affordances of robot manipulators in an introductory engineering course. Int. J. Eng. Educ. 2020, 36, 1691–1707. [Google Scholar]
- Chen, S.; Fishberg, A.; Shimelis, E.; Grimm, J.; van Broekhoven, S.; Shin, R.; Karaman, S. A Hands-on Middle-School Robotics Software Program at MIT. In Proceedings of the IEEE Integrated STEM Education Conference, Princeton, NJ, USA, 1 August 2020. [Google Scholar]
- Goodrick, D. Comparative Case Studies; Methodological Briefs: Impact Evaluation 9; United Nations Children’s Fund (UNICEF): Florence, Italy, 2014; pp. 1–17. [Google Scholar]
- Alimisis, D. Educational robotics: Open questions and new challenges. Themes Sci. Technol. Educ. 2013, 6, 63–71. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Task | Students’ Activities | Applications of IT |
|---|---|---|
| Set up a personal AR workspace | Placing the virtual robot on the home table using the mobile device screen | Creating an integrated view of real and virtual objects |
| Make a block diagram of the robot system | Exploring the robot structure, components, and their interactions | Creating a concept map of the robot system |
| Set the robot motion system assembly order | Determining the assembly sequence for the robot motion system | Creating a visual representation of an assembly |
| Replace the on-board computer of the robot | Replacing the robot computer with a selected alternative one | Selecting an item by analysis of its technical characteristics |
| Attach a container to the robot | Upgrading the robot system by attaching a suitable container | Selecting an item by analysis of its shape and dimensions |
| Explore robot sensors and their fusion | Measuring distances in the simulated environment using the robot sensors | Creating a workspace image based on multi-sensor data |
| Navigate the robot to avoid obstacles | Determining the path and speed of robot motion using sensor fusion | Dynamic integration of spatial and kinematics data |
| Aspects of the Contribution | Contribution Level (%) | |
|---|---|---|
| Notable | High | |
| Understanding the robot structure and its components | 81 | 46 |
| Understanding TurtleBot2 as an integrated system | 77 | 40 |
| Understanding RACECAR MN as an integrated system | 91 | 60 |
| Understanding the interactions among robot components | 84 | 51 |
| Experience that can be used for studying real robot systems | 90 | 68 |
| Aspects of the Contribution | Understanding TurtleBot2 as an Integrated System | Understanding RACECAR MN as an Integrated System | Understanding the Interactions among Robot Components |
|---|---|---|---|
| Understanding the robot structure and its components | 0.657 | 0.584 | 0.398 |
| First Workshop | Second Workshop | Third Workshop | |
|---|---|---|---|
| Successfully performed the task | 100% | 86% | Over 90% |
| Contribution to learning the subject | -- -- | 83% Robotic manipulations | 81% Mobile robot system |
| Contribution to learning about robotics in IE | 78% Robot-manipulators | 82% Robot-manipulators | 90% Mobile robots |
| Contribution to training the skill | 46% Spatial skills | 85% Spatial skills | Over 80% Integrative thinking skills |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Verner, I.; Cuperman, D.; Perez-Villalobos, H.; Polishuk, A.; Gamer, S. Augmented and Virtual Reality Experiences for Learning Robotics and Training Integrative Thinking Skills. Robotics 2022, 11, 90. https://doi.org/10.3390/robotics11050090
Verner I, Cuperman D, Perez-Villalobos H, Polishuk A, Gamer S. Augmented and Virtual Reality Experiences for Learning Robotics and Training Integrative Thinking Skills. Robotics. 2022; 11(5):90. https://doi.org/10.3390/robotics11050090
Chicago/Turabian StyleVerner, Igor, Dan Cuperman, Huberth Perez-Villalobos, Alex Polishuk, and Sergei Gamer. 2022. "Augmented and Virtual Reality Experiences for Learning Robotics and Training Integrative Thinking Skills" Robotics 11, no. 5: 90. https://doi.org/10.3390/robotics11050090
APA StyleVerner, I., Cuperman, D., Perez-Villalobos, H., Polishuk, A., & Gamer, S. (2022). Augmented and Virtual Reality Experiences for Learning Robotics and Training Integrative Thinking Skills. Robotics, 11(5), 90. https://doi.org/10.3390/robotics11050090