
A Dynamic Approach to Low-Cost Design, Development, and Computational Simulation of a 12DoF Quadruped Robot

 ,
, 
 and
and
Abstract
:1. Introduction
- We introduce the novel Watt six-bar linkage mechanism for better walking motion.
- The motivation of this research was to develop a low-cost and modular quadruped assistive robot platform for use in security and surveillance operations.
- We innovatively designed robot parts to make it modular, such that users can quickly assemble and disassemble the robot.
- We explain the kinematic equations, demonstrate the URDF process, and test several commands in the PyBullet physics engine.
- We discuss the material characteristics and structural analysis of the robot’s parts.
2. Design Principle
3. Working Mechanism
- The watt six-bar linkage mechanism provides a greater range of motion for leg actuation than the four-bar linkage mechanism.
- The watt six-bar linkage mechanism produces leg motion during gait generation, which is very close to the leg motion of a four-legged animal compared to the four-bar linkage mechanism.
- The four-bar linkage mechanism has many motion constraints. Therefore, the four-bar linkage mechanism robot has a limited range of motion for its leg. The four-bar linkage has a total of eight design variables.
- The watt six-bar linkage mechanism has fourteen design variables.
- The six-bar linkage has more motion parameters than the four-bar linkage, increasing the range of motion.
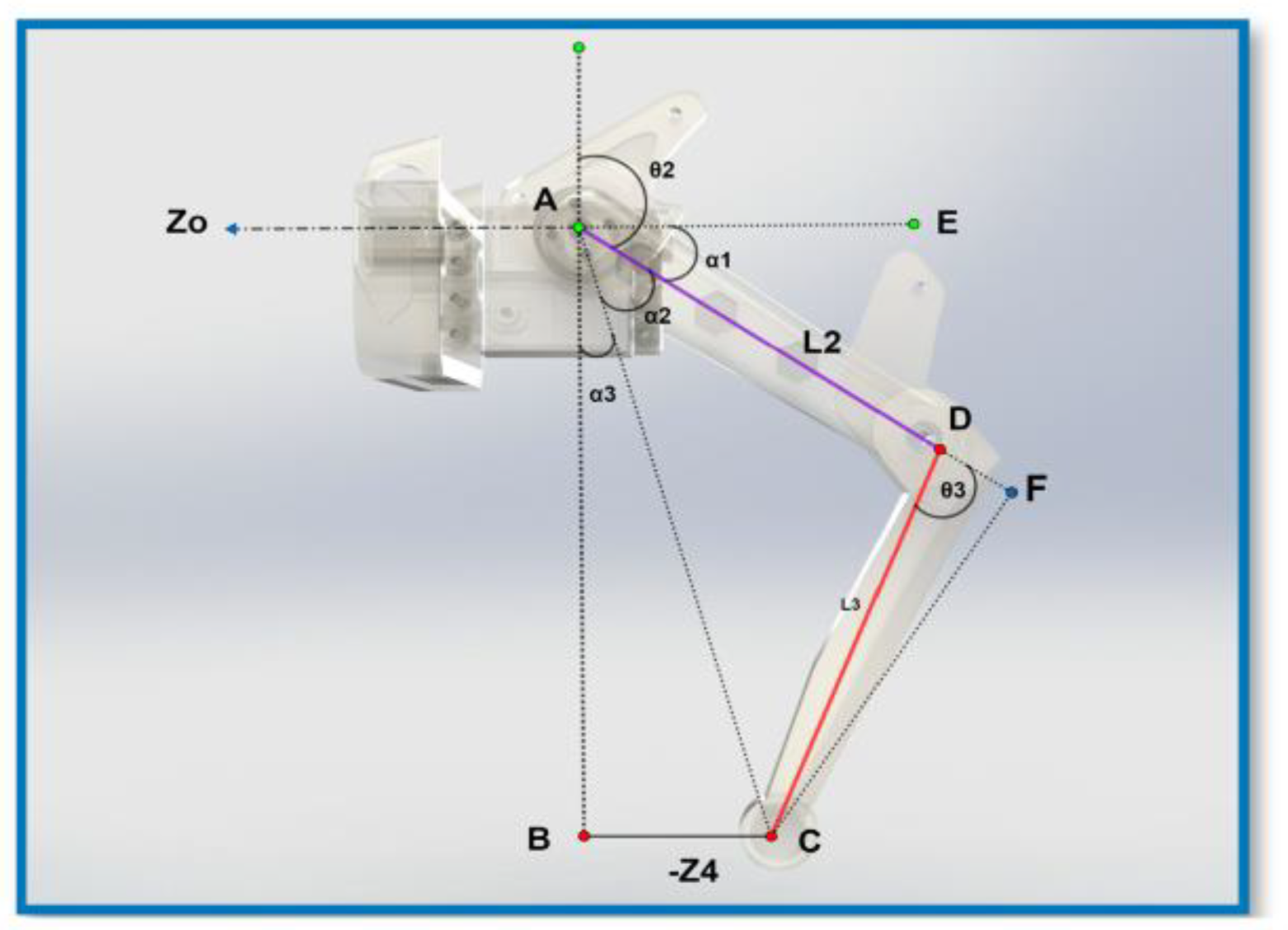
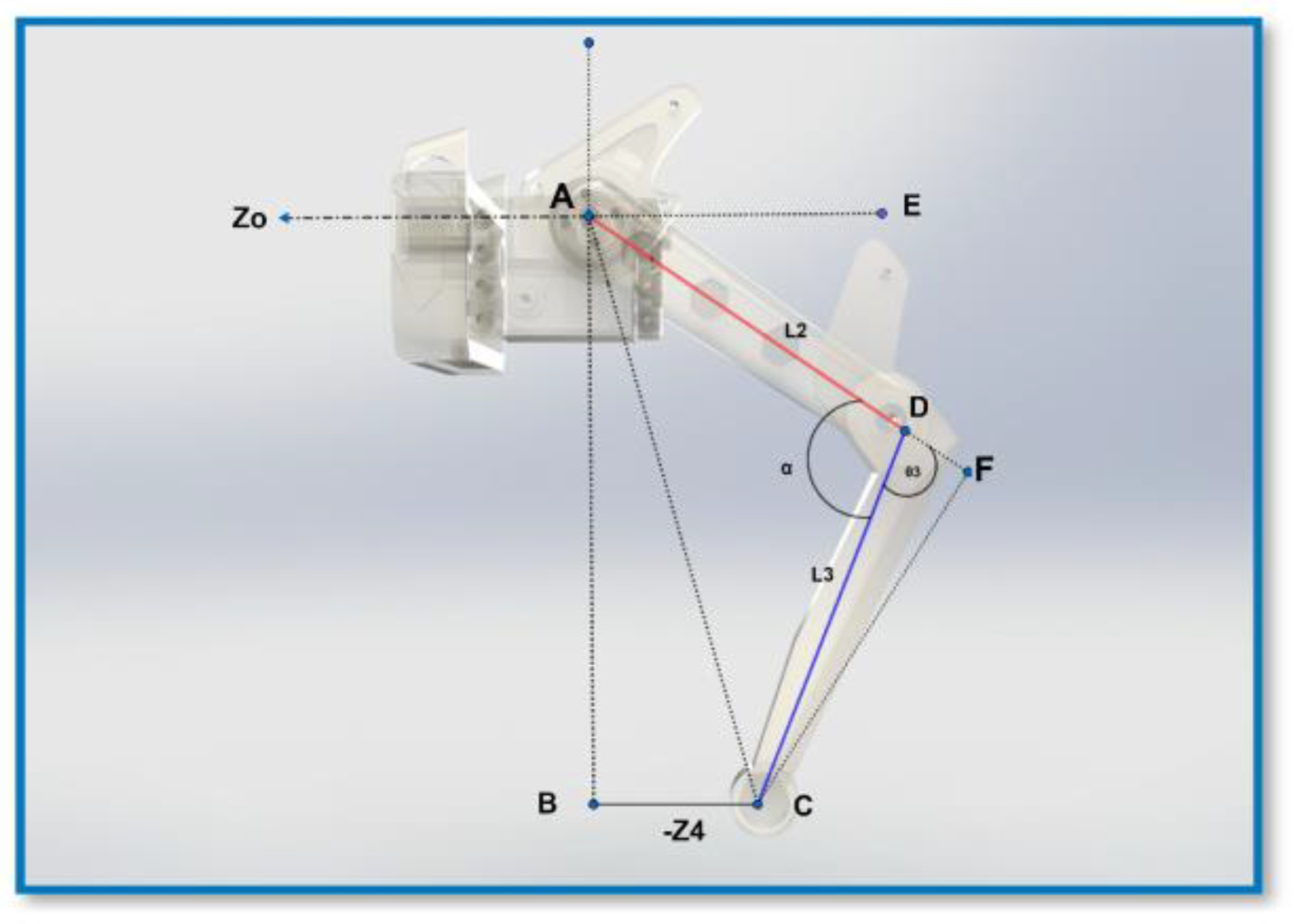
3.1. Mathematical Analysis
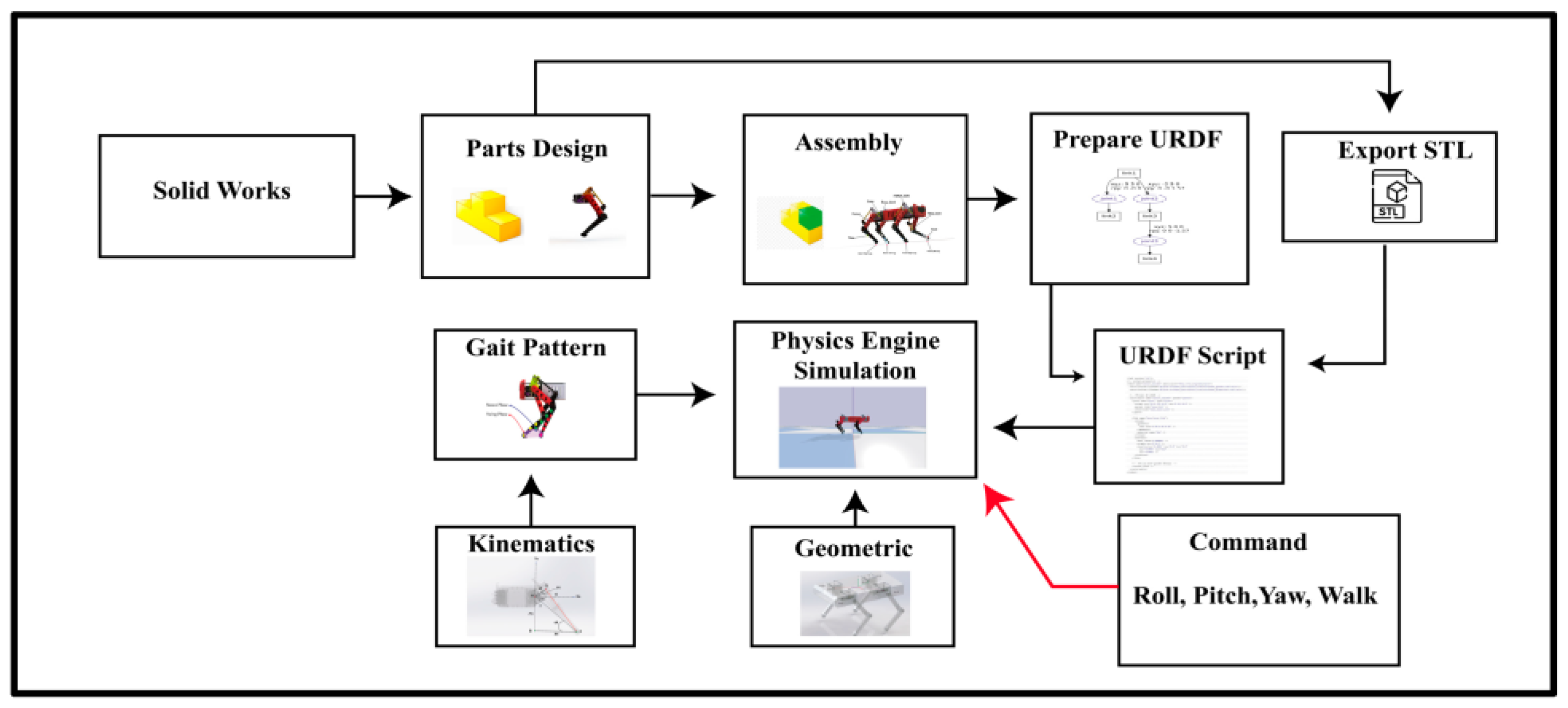
3.2. Simulation Model Workflow
Workflow Procedure
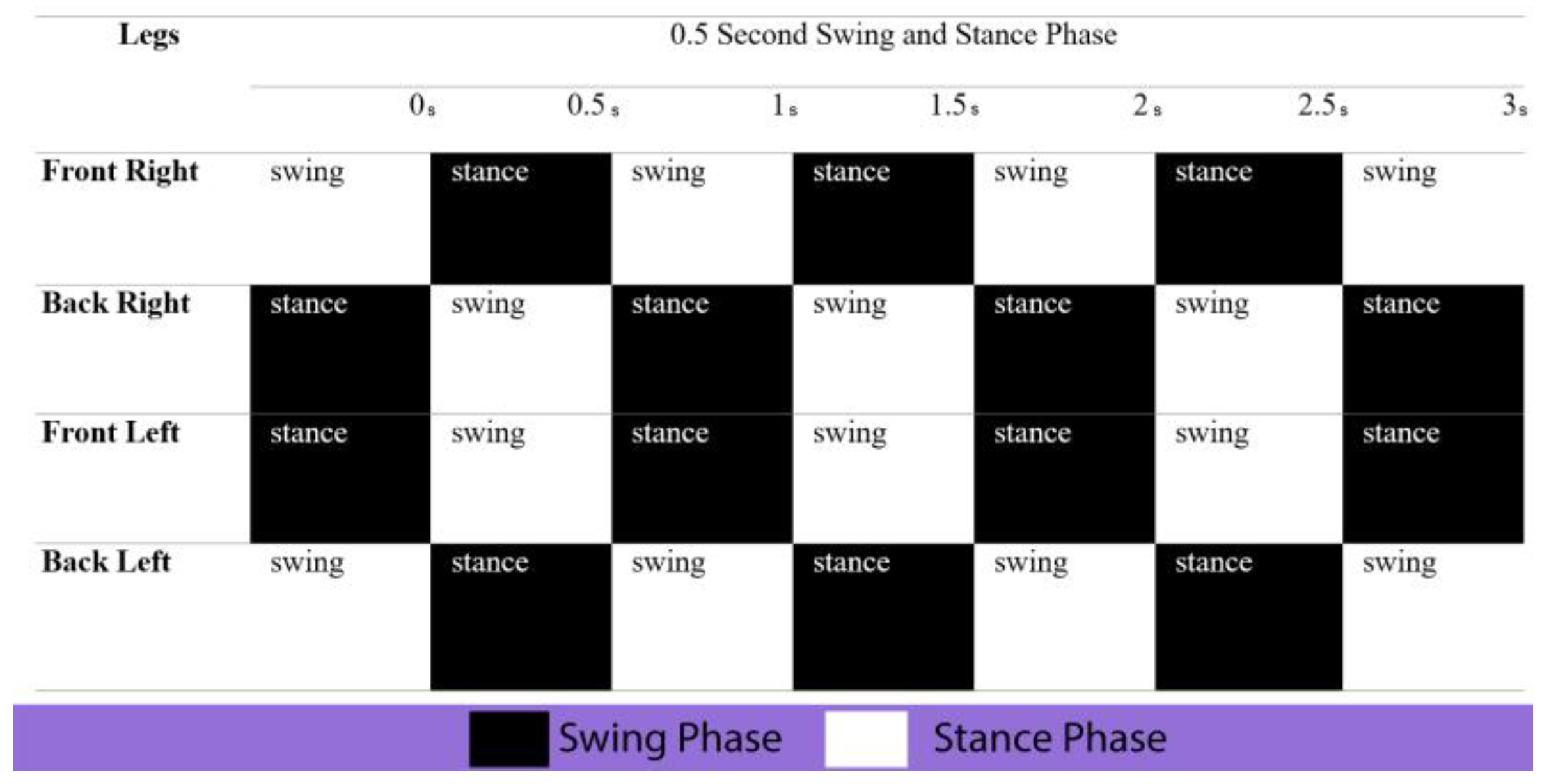
3.3. Step Trajectory and Gait Generation
4. Results and Discussion
4.1. Material Analysis
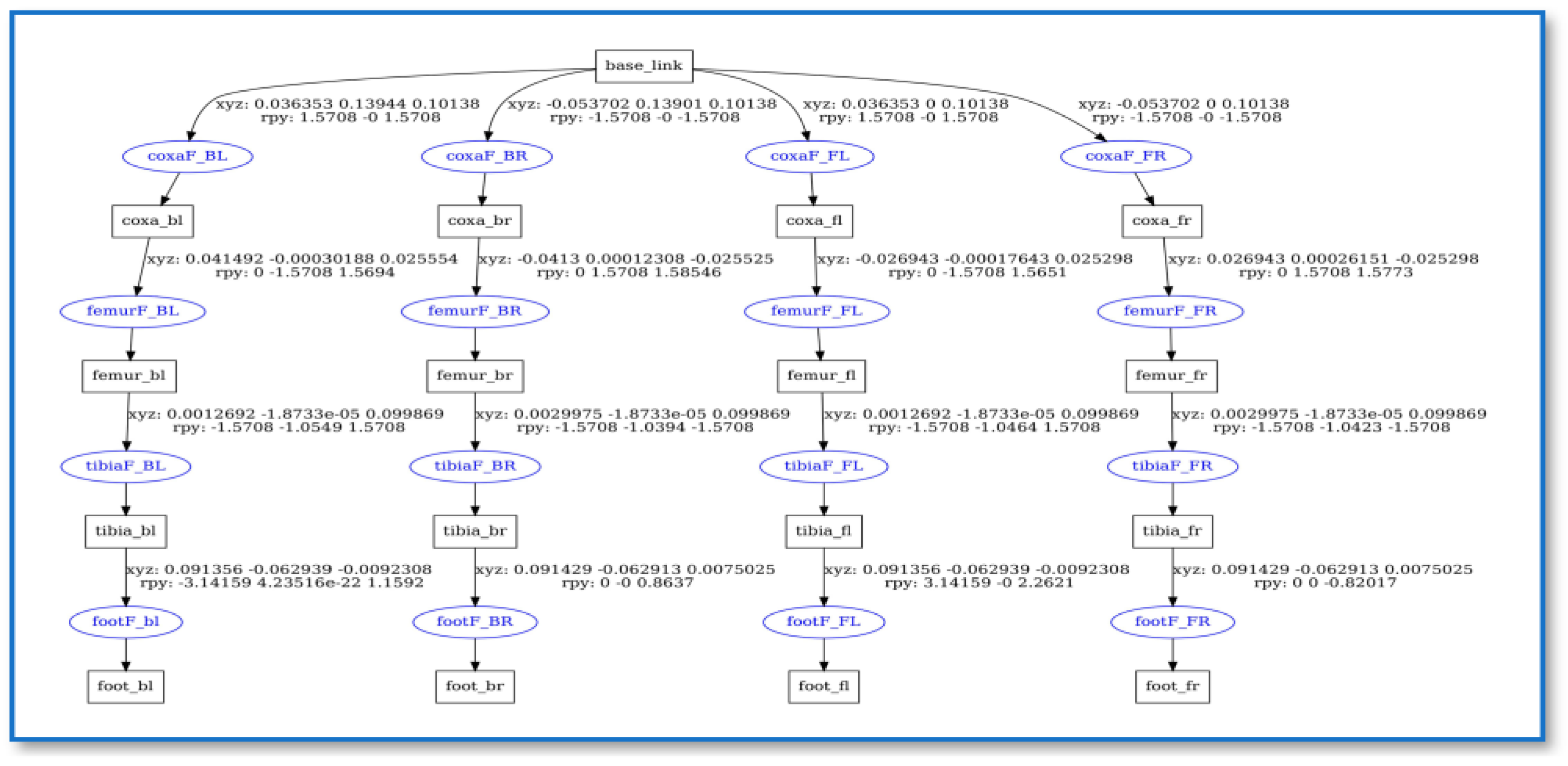
4.2. Unified Robot Description Format Verification
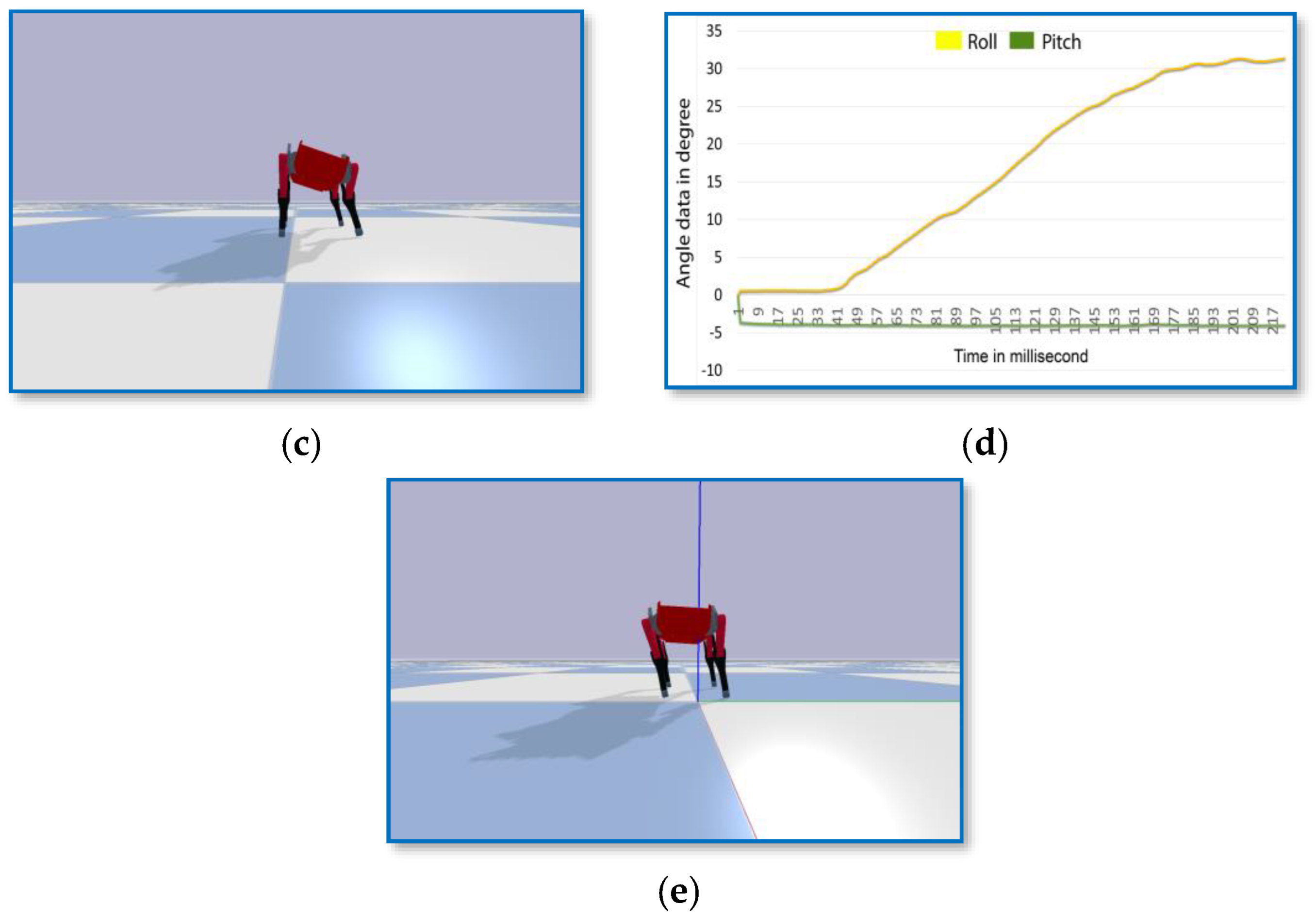
4.3. Dynamic Simulation Results
5. Conclusions and Future Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| URDF | Unified Robot Description Format |
| DoF | Degrees Of Freedom |
| FEM | Finite Element Method |
| FoS | Factor of Safety |
| MIT | Massachusetts Institute of Technology |
| CAD | Computer Aided Design |
| STL | Stereolithography |
| PID | Proportional Integral Derivative |
| IMU | Inertial Measurement Unit |
| FR | Front Right |
| FL | Front Left |
| BR | Back Right |
| BL | Back Left |
| g | gram |
| Cm | Centimeter |
References
- Yao, L.; Hao, Y.; Lu, Z. Design and driving model for the quadruped robot: An elucidating draft. Adv. Mech. Eng. 2021, 13, 16878140211009035. [Google Scholar] [CrossRef]
- Meng, X.; Wang, S.; Cao, Z.; Zhang, L. A review of quadruped robots and environment perception. In Proceedings of the 2016 35th Chinese Control Conference (CCC), Chengdu, China, 27–29 July 2016; IEEE: New York, NY, USA, 2016. [Google Scholar]
- Biswal, P.; Mohanty, P.K. Mohanty. Development of quadruped walking robots: A review. Ain Shams Eng. J. 2021, 12, 2017–2031. [Google Scholar] [CrossRef]
- Todd, D.J. Walking Machines: An Introduction to Legged Robots; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2013. [Google Scholar]
- Rong, X.; Li, Y.; Ruan, J.; Li, B. Design, and simulation for a hydraulic actuated quadruped robot. J. Mech. Sci. Technol. 2012, 26, 1171–1177. [Google Scholar] [CrossRef]
- Yang, K.; Zhou, L.; Rong, X.; Li, Y. Onboard hydraulic system controller design for quadruped robot driven by gasoline engine. Mechatronics 2018, 52, 36–48. [Google Scholar] [CrossRef]
- Atique, M.U.; Sarker, R.I.; Ahad, A.R. Development of an 8DOF quadruped robot and implementation of Inverse Kinematics using Denavit-Hartenberg convention. Heliyon 2018, 4, e01053. [Google Scholar] [CrossRef] [Green Version]
- Gor, M.M.; Pathak, P.M.; Samantaray, A.K.; Alam, K.; Kumar, P.; Anand, D.; Vijay, P.; Sarkar, R.; Yang, J.-M.; Kwak, S.W. Development of a compliant legged quadruped robot. Sādhanā 2018, 43, 102. [Google Scholar] [CrossRef] [Green Version]
- WildCat-The World’s Fastest Quadruped Robot. Available online: https://www.bostondynamics.com/wildcat (accessed on 14 March 2019).
- Ananthanarayanan, A.; Azadi, M.; Kim, S. Towards a bio-inspired leg design for high-speed running. Bioinspir. Biomim. 2012, 7, 046005. [Google Scholar] [CrossRef]
- Spröwitz, A.; Tuleu, A.; Vespignani, M.; Ajallooeian, M.; Badri, E.; Ijspeert, A.J. Towards Dynamic Trot Gait Locomotion-Design, Control, and Experiments with Cheetah-cub, a Compliant Quadruped Robot. Int. J. Robot. Res. 2013, 32, 932–950. [Google Scholar] [CrossRef] [Green Version]
- Rosendo, A.; Liu, X.; Nakatsu, S.; Shimizu, M. A combined CPG-stretch reflex study on a musculoskeletal pneumatic quadruped. In Biomimetic and Biohybrid Systems, Proceedings of the Third International Conference, Living Machines 2014, Milan, Italy, 30 July–1 August 2014; Springer International Publishing: Cham, Switzerland, 2014. [Google Scholar]
- Lu, M.; Jing, B.; Duan, H.; Gao, G. Design of a Small Quadruped Robot with Parallel Legs. Complexity 2022, 2022, 9663746. [Google Scholar] [CrossRef]
- Pinto, V.; Soares, I.; Rocha, M.; Lima, J.; Gonçalves, J.; Costa, P. Design, modeling, and control of an autonomous legged-wheeled hybrid robotic vehicle with non-rigid joints. Appl. Sci. 2021, 11, 6116. [Google Scholar] [CrossRef]
- Rahman, M.H.; Islam, M.M.; Al Monir, M.F.; Alam, S.B.; Rahman, M.M.; Shidujaman, M.; Islam, R. Kinematics analysis of a quadruped robot: Simulation and Evaluation. In Proceedings of the 2022 2nd International Conference on Image Processing and Robotics (ICIPRob), Colombo, Sri Lanka, 12 March 2022; IEEE: New York, NY, USA; pp. 1–6. [Google Scholar]
- Biswal, P.; Prases, K. Mohanty. Kinematic and Dynamic Modeling of a Quadruped Robot. Machines, Mechanism and Robotics; Springer: Singapore, 2022; pp. 369–378. [Google Scholar]
- Morlando, V.; Teimoorzadeh, A.; Ruggiero, F. Whole-body control with disturbance rejection through a momentum-based observer for quadruped robots. Mech. Mach. Theory 2021, 164, 104412. [Google Scholar] [CrossRef]
- Yi, S. Reliable gait planning and control for miniaturized quadruped robot pet. Mechatronics 2010, 20, 485–495. [Google Scholar] [CrossRef]
- Ho, T.; Lee, S. Piezoelectrically actuated biomimetic self-contained quadruped bounding robot. J. Bionic Eng. 2009, 6, 29–36. [Google Scholar] [CrossRef]
- Sun, Z.; Zhu, Z.; Zhang, G.; Li, Y.; Rong, X. Design and Control of a Quadruped Robot with Changeable Configuration. In Proceedings of the International Conference on Intelligent Robotics and Applications, Harbin, China, 1–3 August 2022; Springer: Cham, Switzerland, 2021. [Google Scholar]
- Shi, Y.; Li, S.; Guo, M.; Yang, Y.; Xia, D.; Luo, X. Structural design, simulation and experiment of quadruped robot. Appl. Sci. 2021, 11, 10705. [Google Scholar] [CrossRef]
- Cong, Q.; Shi, X.; Wang, J.; Xiong, Y.; Su, B.; Xu, W.; Liu, H.; Zhou, K.; Jiang, L.; Tian, W. Stability Study and Simulation of Quadruped Robots with Variable Parameters. Appl. Bionics Biomech. 2022, 2022, 9968042. [Google Scholar] [CrossRef]
- Rodinò, S.; Matteo Curcio, E.; di Bella, A.; Persampieri, M.; Funaro, M.; Carbone, G. Design, simulation, and preliminary validation of a four-legged robot. Machines 2020, 8, 82. [Google Scholar] [CrossRef]
- Takei, Y.; Tazawa, R.; Kaimai, T.; Morishita, K.; Saito, K. Dynamic simulation of non-programmed gait generation of quadruped robot. Artif. Life Robot. 2022, 27, 480–486. [Google Scholar] [CrossRef]
- Bledt, G.; Powell, M.J.; Katz, B.; Di Carlo, J.; Wensing, P.M.; Kim, S. MIT Cheetah 3: Design and control of a robust, dynamic quadruped robot. In Proceedings of the 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, 1–5 October 2018; IEEE: New York, NY, USA, 2018. [Google Scholar]
- Raibert, M.; Blankespoor, K.; Nelson, G.; Playter, R. BigDog, the rough-terrain quadruped robot. IFAC Proc. Vol. 2008, 41, 10822–10825. [Google Scholar] [CrossRef] [Green Version]
- Zong, M.; Yang, Y.; Fu, M.; Wang, S.; Deng, Z. Dynamic modeling and kinematic analysis of Frog robot. In Proceedings of the 32nd Chinese Control Conference, Xi’an, China, 26–28 July 2013; IEEE: New York, NY, USA; pp. 5848–5853. [Google Scholar]
- Raibert, M. Alphadog, the rough-terrain robot. In Adaptive Mobile Robotics; World Scientific: Singapore, 2012; p. 7. [Google Scholar]
- Semini, C.; Tsagarakis, N.G.; Guglielmino, E.; Focchi, M.; Cannella, F.; Caldwell, D.G. Design of HyQ-a hydraulically and electrically actuated quadruped robot. Proc. Inst. Mech. Eng. Part I J. Syst. Control Eng. 2011, 225, 831–849. [Google Scholar] [CrossRef]
- Chen, X.; Gao, F.; Qi, C.; Zhao, X. Spring parameters design to increase the loading capability of a hydraulic quadruped robot. In Proceedings of the 2013 International Conference on Advanced Mechatronic Systems, Luoyang, China, 25–27 September 2013; IEEE: New York, NY, USA, 2013. [Google Scholar]
- Hutter, M.; Gehring, C.; Jud, D.; Lauber, A.; Bellicoso, C.D.; Tsounis, V.; Hwangbo, J.; Bodie, K.; Fankhauser, P.; Bloesch, M.; et al. Anymal-a highly mobile and dynamic quadrupedal robot. In Proceedings of the 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Daejeon, Republic of Korea, 9–14 October 2016; IEEE: New York, NY, USA, 2016. [Google Scholar]
- Ackerman, E. Boston Dynamics’ SpotMini Is all Electric, Agile, and has a Capable Face-Arm; IEEE Spectrum: New York, NY, USA, 2016. [Google Scholar]
- Tirumala, S.; Sagi, A.; Paigwar, K.; Joglekar, A.; Bhatnagar, S.; Ghosal, A.; Bharadwaj, A.; Kolathaya, S. Gait library synthesis for quadruped robots via augmented random search. arXiv 2019, arXiv:1912.12907. [Google Scholar]
- Oruç, H.; George, M. Phillips. q-Bernstein polynomials and Bézier curves. J. Comput. Appl. Math. 2003, 151, 1–12. [Google Scholar] [CrossRef] [Green Version]
- Rahman, M.H. Practical Implementation and Simulation Video of Iron Dog Mini. Available online: https://github.com/irondogmini (accessed on 7 January 2023).

























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Robot | Year | State-of-the-Art Technology Adoption | |||||||
|---|---|---|---|---|---|---|---|---|---|
| Light Weight | Heavy Weight | Carry Load | Low Cost | Modular | Power Efficient | Mechanism | Agile | ||
| Sony Aibo | 1999 | ✓ | - | - | - | - | ✓ | Electric | - |
| BigDog [26] | 2005 | - | ✓ | ✓ | - | - | - | Hydraulic | ✓ |
| Scalf1 [6] | 2011 | - | ✓ | ✓ | - | - | - | Hydraulic | - |
| Frog [27] | 2013 | - | ✓ | ✓ | - | - | - | - | - |
| Alpha Dog [28] | 2012 | - | ✓ | ✓ | - | - | - | Hydraulic | ✓ |
| HyQ [29] | 2011 | - | ✓ | ✓ | - | - | - | Hydraulic and Electric | ✓ |
| Baby Elephant [30] | 2013 | - | ✓ | ✓ | - | - | - | Serial–parallel Hybrid | ✓ |
| AnyMal [31] | 2016 | - | ✓ | ✓ | - | - | ✓ | Electric | ✓ |
| Spot [32] | 2017 | - | ✓ | ✓ | - | ✓ | ✓ | Electric | ✓ |
| MIT Cheetah 3 [25] | 2018 | - | ✓ | ✓ | - | - | ✓ | Electric | ✓ |
| Unitree Laikago | 2017 | - | ✓ | ✓ | - | ✓ | ✓ | Electric | ✓ |
| Stoch 2 [33] | 2019 | - | ✓ | - | - | - | - | Electric-five bar linkage | ✓ |
| Proposed | 2022 | ✓ | - | ✓ | ✓ | ✓ | ✓ | Electric-Six bar Linkage | ✓ |
| Parameter | Value | Total Mass (g) | Parameter | Value | Total Mass (g) | ||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Height (cm) | Width (cm) | Number of Uses | Single Part Mass (g) | Height (cm) | Width (cm) | Number of Uses | Single Part Mass (g) | ||||
| Base | 30 | 6 | 2 | 92 | 184 | Servo Arm | 2.4 | 0.63 | 4 | 5 | 20 |
| Femur | 12 | 2.5 | 4 | 55 | 220 | Long rod end | 4.5 | 0.25 | 4 | 7 | 28 |
| Tibia | 17 | 2.5 | 4 | 48 | 192 | Short Rod end | 1.2 | 0.2 | 4 | 1.8 | 7.2 |
| Actuator | 5.6 | 2 | 12 | 80 | 960 | Front Head Module | 7 | 12 | 1 | 55 | 55 |
| Rolling Servo mount | 4 | 2 | 4 | 10 | 40 | Back Shell For torso lock | 7 | 12 | 1 | 48 | 48 |
| Side Servo Mount | 4 | 2 | 4 | 8 | 32 | Side pitch mount (double Servo Module) | 12 | 5.6 | 2 | 120 | 240 |
| Servo Horn | 0.14 | 0.025 | 4 | 6 | 24 | Screws | 0.3 | 0.05 | 74 | 1 | 74 |
| Free linker | 6.32 | 4.60 | 4 | 12 | 48 | Battery | - | - | 1 | 250 | 250 |
| Other Parts | - | - | - | 150 | 150 | Total Weight of Robot After Fully Mounted | 2572.2 g | ||||
| Control Points | (mm) | (mm) | ||
|---|---|---|---|---|
| p0 | a0 | 100 | d0 | −252.4 |
| p1 | a1 | 100 | d1 | −250 |
| p2 | a2 | 140 | d2 | −250 |
| p3 | a3 | 150 | d3 | −180 |
| p4 | a4 | 150 | d4 | −180 |
| p5 | a5 | 150 | d5 | −180 |
| p6 | a6 | −100 | d6 | −70 |
| p7 | a7 | 0 | d7 | −180 |
| p8 | a8 | 0 | d8 | −160.5 |
| p9 | a9 | −151.5 | d9 | −160.5 |
| p10 | a10 | −151.5 | d10 | −160.5 |
| p11 | a11 | −141 | d11 | −250 |
| p12 | a12 | −100 | d12 | −250 |
| p13 | a13 | −90 | d13 | −260 |
| Property | Value | Unit |
|---|---|---|
| Tensile strength | 30 | MPa |
| Mass density | 1020 | kg/m3 |
| Elastic modulus | 2000 | MPa |
| Shear modulus | 318.9 | MPa |
| Poisson’s ratio | 0.394 | N/A |
| Robot Positions | Hips Joint Angle (Degree) | Femur Joint Angle (Degree) | Tibia Joint Angle (Degree) | |||
|---|---|---|---|---|---|---|
| Ideal State Figure 16a | Coxa FR | 0 | Femur FR | 0 | Tibia FR | 0 |
| Coxa FL | 0 | Femur FL | 0 | Tibia FL | 0 | |
| Coxa BR | 0 | Femur BR | 0 | Tibia BR | 0 | |
| Coxa BL | 0 | Femur BL | 0 | Tibia BL | 0 | |
| Standing State Figure 16b | Coxa FR | 0 | Femur FR | −45 | Tibia FR | 90 |
| Coxa FL | 0 | Femur FL | 45 | Tibia FL | 90 | |
| Coxa BR | 0 | Femur BR | −45 | Tibia BR | 90 | |
| Coxa BL | 0 | Femur BL | 45 | Tibia BL | 90 | |
| Component | Per Unit Cost (USD) | Quantity | Total Cost (USD) |
|---|---|---|---|
| SPT5535LV Actuator-Servo | 15 | 12 Pieces | 180 |
| Metal Servo Arm | 0.50 | 4 Pieces | 2 |
| Metal Servo Horn | 0.40 | 4 Pieces | 1.6 |
| Hex spacer | 0.10 | 30 Pieces | 3 |
| M3 Screws | 0.05 | 85 Pieces | 4.3 |
| Brass Inserts | 0.02 | 85 pieces | 1.7 |
| 16Awg Silicon wire | 1.5 (per yard) | 5 yards | 7.5 |
| 3D printing Abs material | 21.99 (per kg) | 2 kg | 43.98 |
| Raspberry Pi 4b | 40 | 1 Pieces | 40 |
| Bluetooth Joystick Controller | 16 | 1 Pieces | 16 |
| Arduino Pro Mega | 8 | 1 Pieces | 8 |
| 41 A Buck Converter | 5 | 1 Pieces | 5 |
| 7.4 V 2200 mAh Battery | 18 | 1 Pieces | 12 |
| IMU 6050 | 0.6 | 1 Pieces | 0.6 |
| Total Cost | 332.18$ | ||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rahman, M.H.; Alam, S.B.; Mou, T.D.; Uddin, M.F.; Hasan, M. A Dynamic Approach to Low-Cost Design, Development, and Computational Simulation of a 12DoF Quadruped Robot. Robotics 2023, 12, 28. https://doi.org/10.3390/robotics12010028
Rahman MH, Alam SB, Mou TD, Uddin MF, Hasan M. A Dynamic Approach to Low-Cost Design, Development, and Computational Simulation of a 12DoF Quadruped Robot. Robotics. 2023; 12(1):28. https://doi.org/10.3390/robotics12010028
Chicago/Turabian StyleRahman, Md. Hasibur, Saadia Binte Alam, Trisha Das Mou, Mohammad Faisal Uddin, and Mahady Hasan. 2023. "A Dynamic Approach to Low-Cost Design, Development, and Computational Simulation of a 12DoF Quadruped Robot" Robotics 12, no. 1: 28. https://doi.org/10.3390/robotics12010028
APA StyleRahman, M. H., Alam, S. B., Mou, T. D., Uddin, M. F., & Hasan, M. (2023). A Dynamic Approach to Low-Cost Design, Development, and Computational Simulation of a 12DoF Quadruped Robot. Robotics, 12(1), 28. https://doi.org/10.3390/robotics12010028