
Occupancy Grid Mapping via Resource-Constrained Robotic Swarms: A Collaborative Exploration Strategy



Abstract
:1. Introduction
2. Related Works
2.1. Metric Mapping Using Homogeneous Swarms with Limited Exteroceptive-Sensing
2.2. Topological Mapping Using Swarms with Limited Exteroceptive-Sensing
2.3. Mapping Using Robotic Systems with “High-Information” Exteroceptive-Sensors
2.4. Area Coverage Using Homogeneous Swarms with Limited Exteroceptive-Sensing
2.5. Comparison Summary
3. Problem Formulation
3.1. Mapper-Robot Motion Planning
3.2. Landmark-Robot Motion Planning
- Position planning: Given the current map, M, a set of positions (nodes) for the landmarks need to be determined. In our work, the positions of the landmarks indirectly dictate where exploration of the environment would occur.
- Path planning: The landmark robots’ paths, from their current positions to the next selected set of planned nodes, need to be determined, given the known obstacles and free spaces within the map. Motion commands for the execution of each path are generated and sent to the landmark robots individually by the central controller.
3.2.1. Position Planning
3.2.2. Path Planning
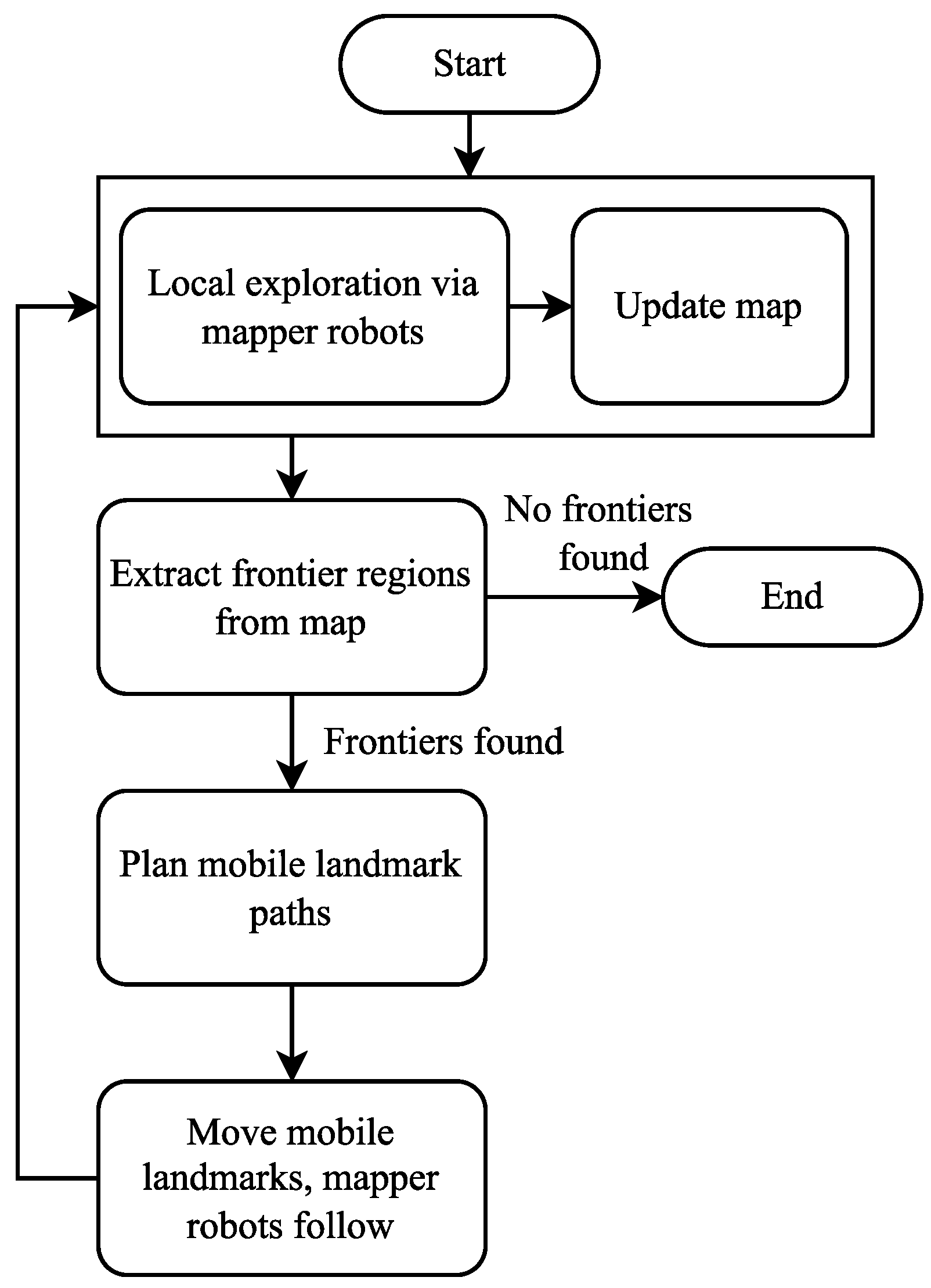
4. Proposed Methodology
4.1. Mapper-Robot Motion Planning
4.1.1. Mapper-Robot Sensing and Motion Models
4.1.2. Swarm Localization
4.1.3. Updating the Occupancy Grid Map
4.2. Landmark-Robot Motion Planning
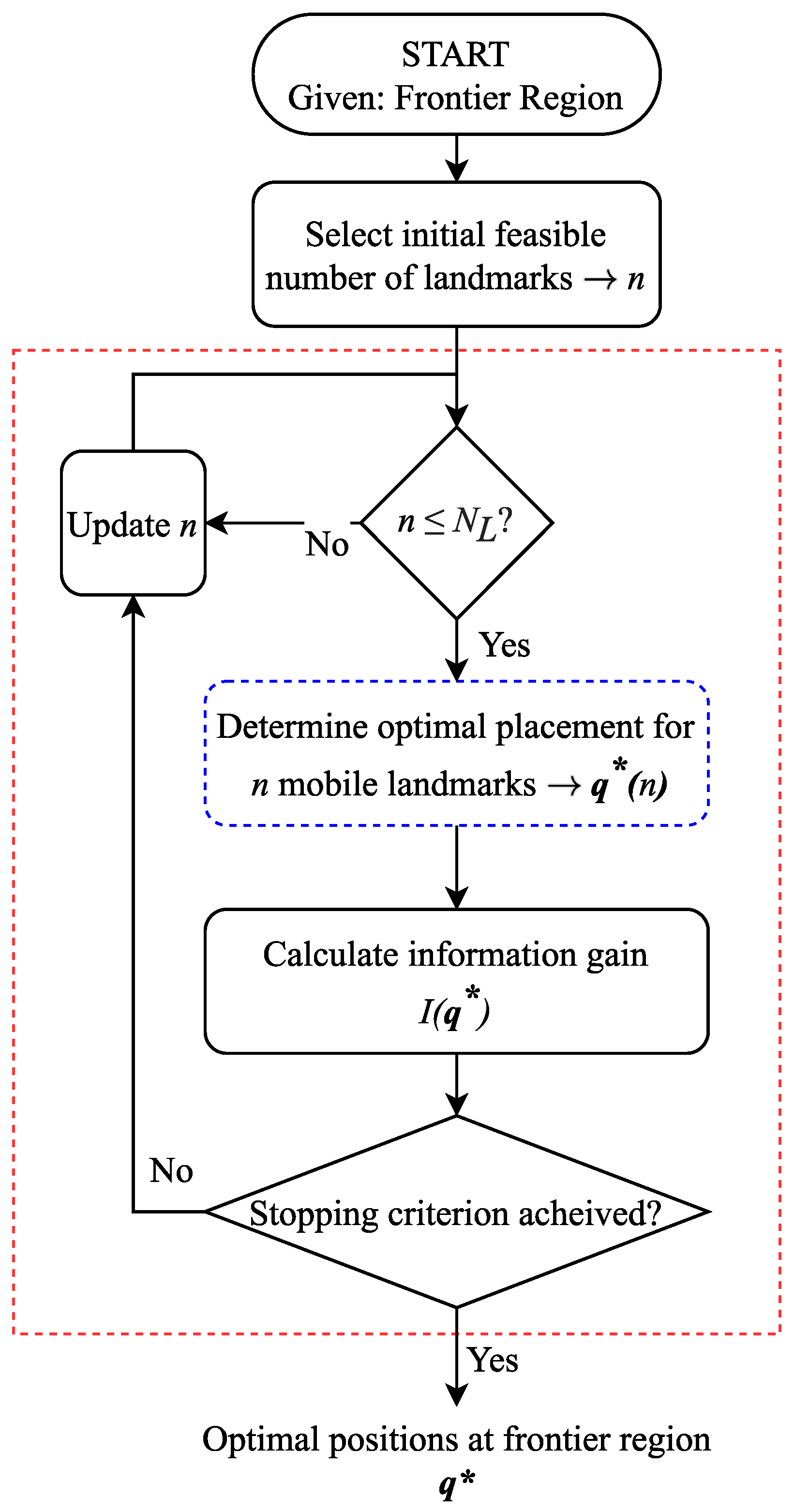
4.2.1. Position Planning
Outer Loop
Inner Loop
4.2.2. Path Planning
5. Results
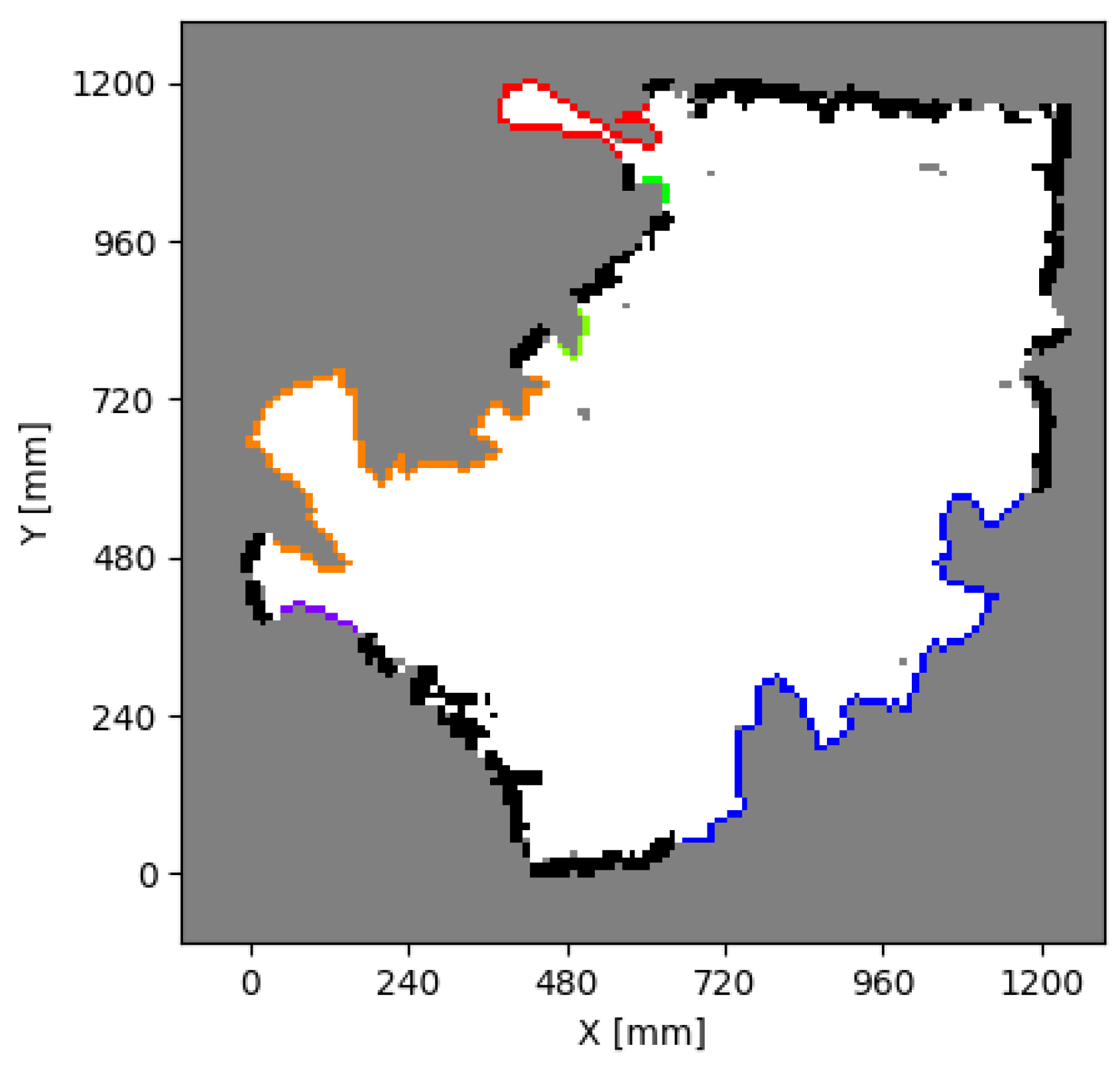
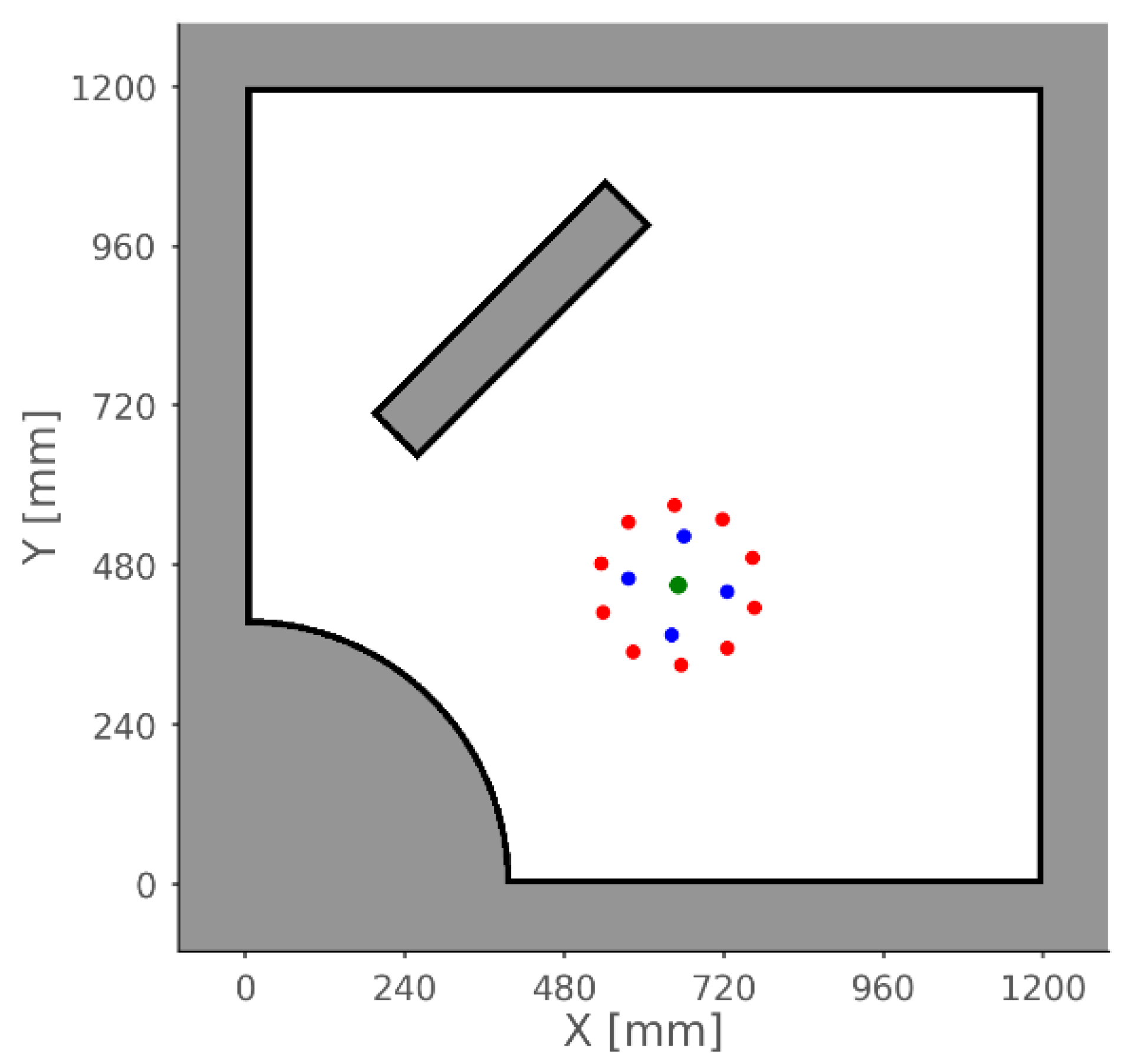
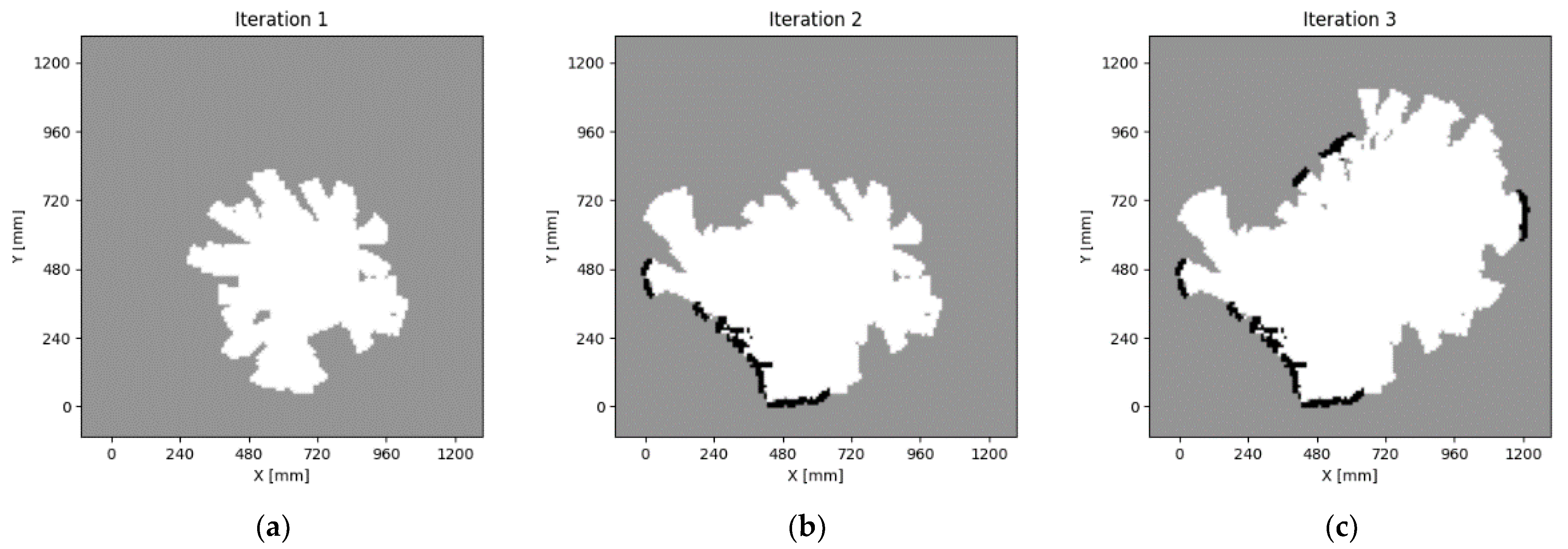
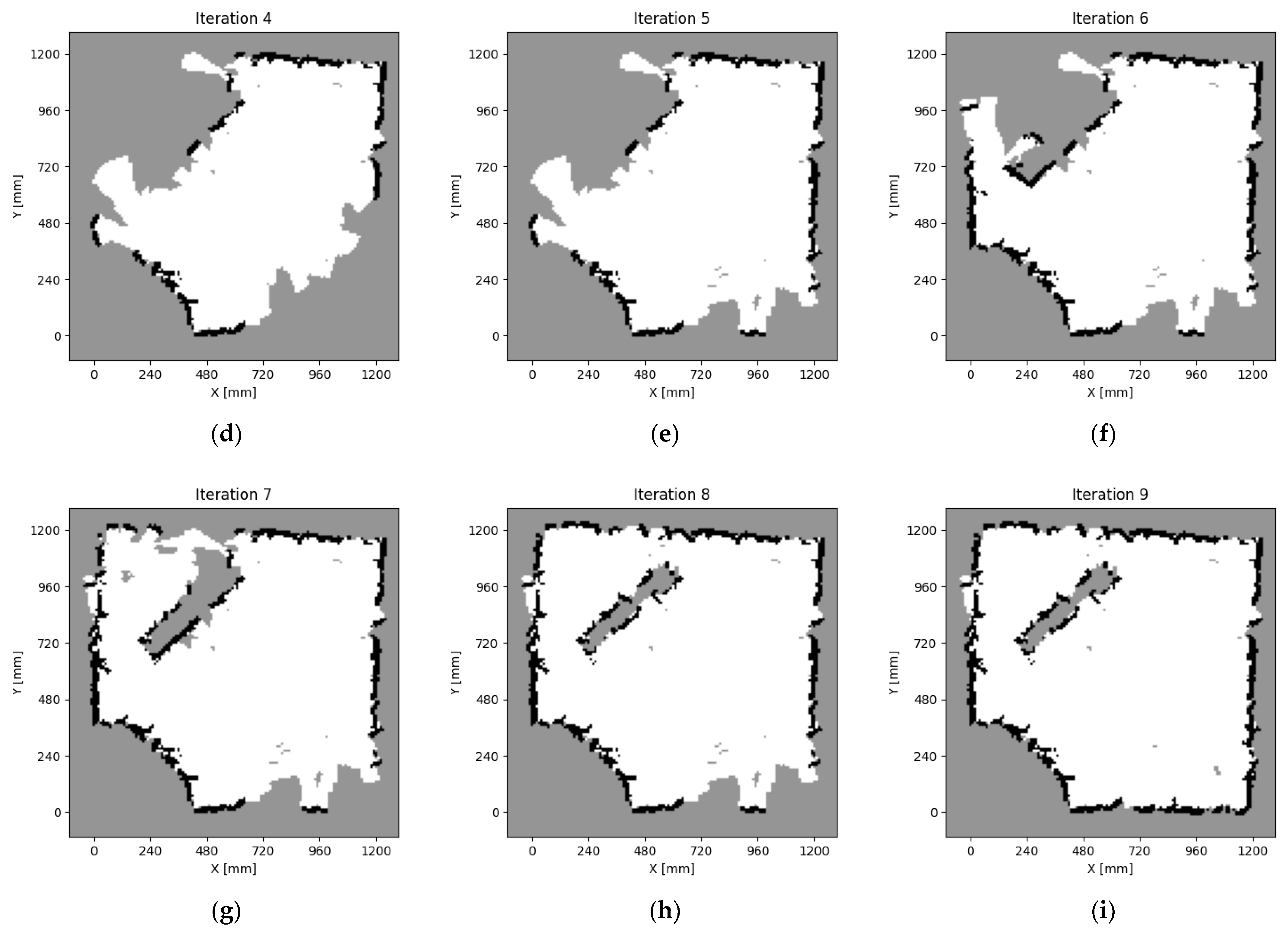
5.1. Illustrative Example—1200 × 1200 mm2 Enclosed Environment
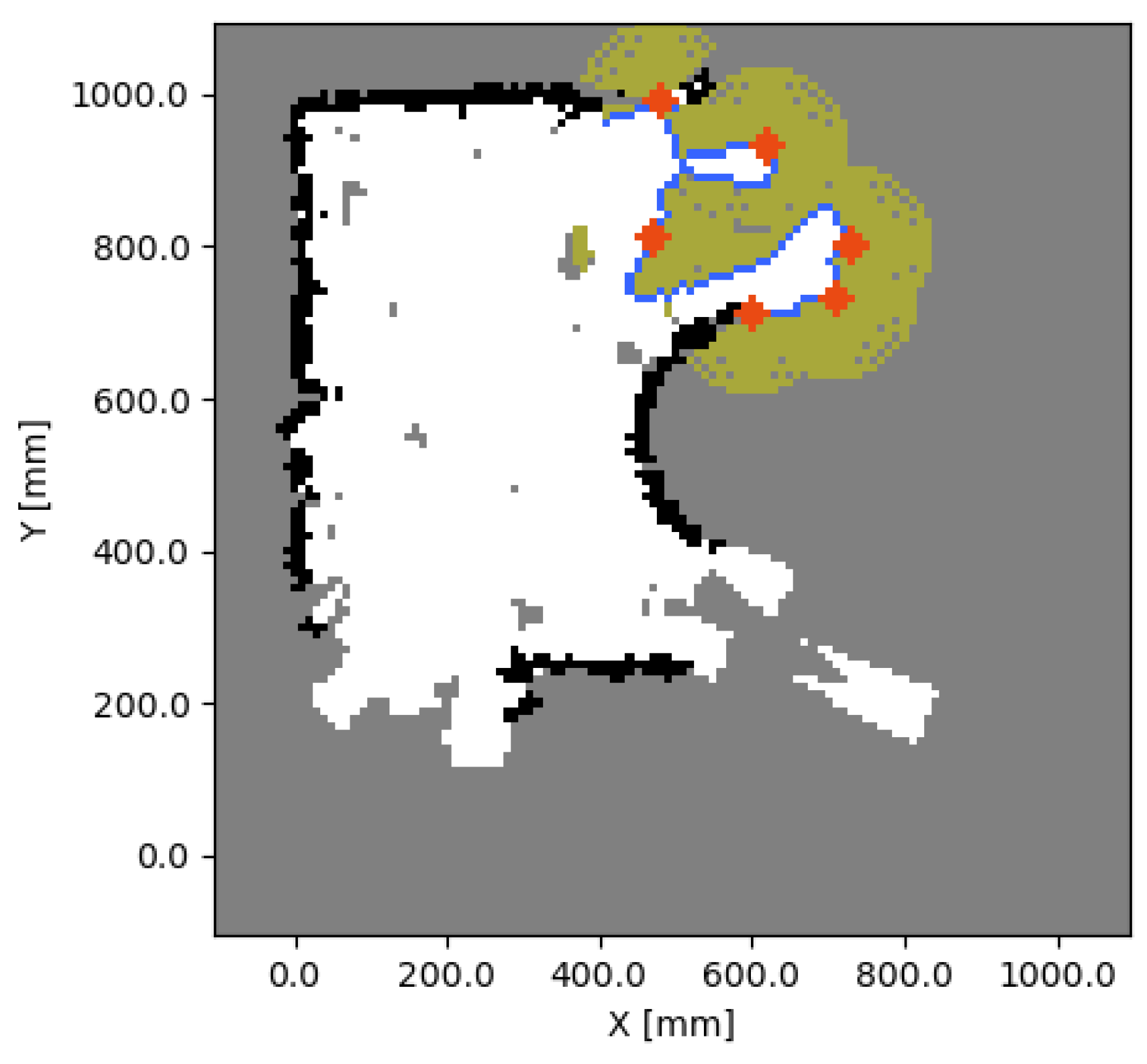
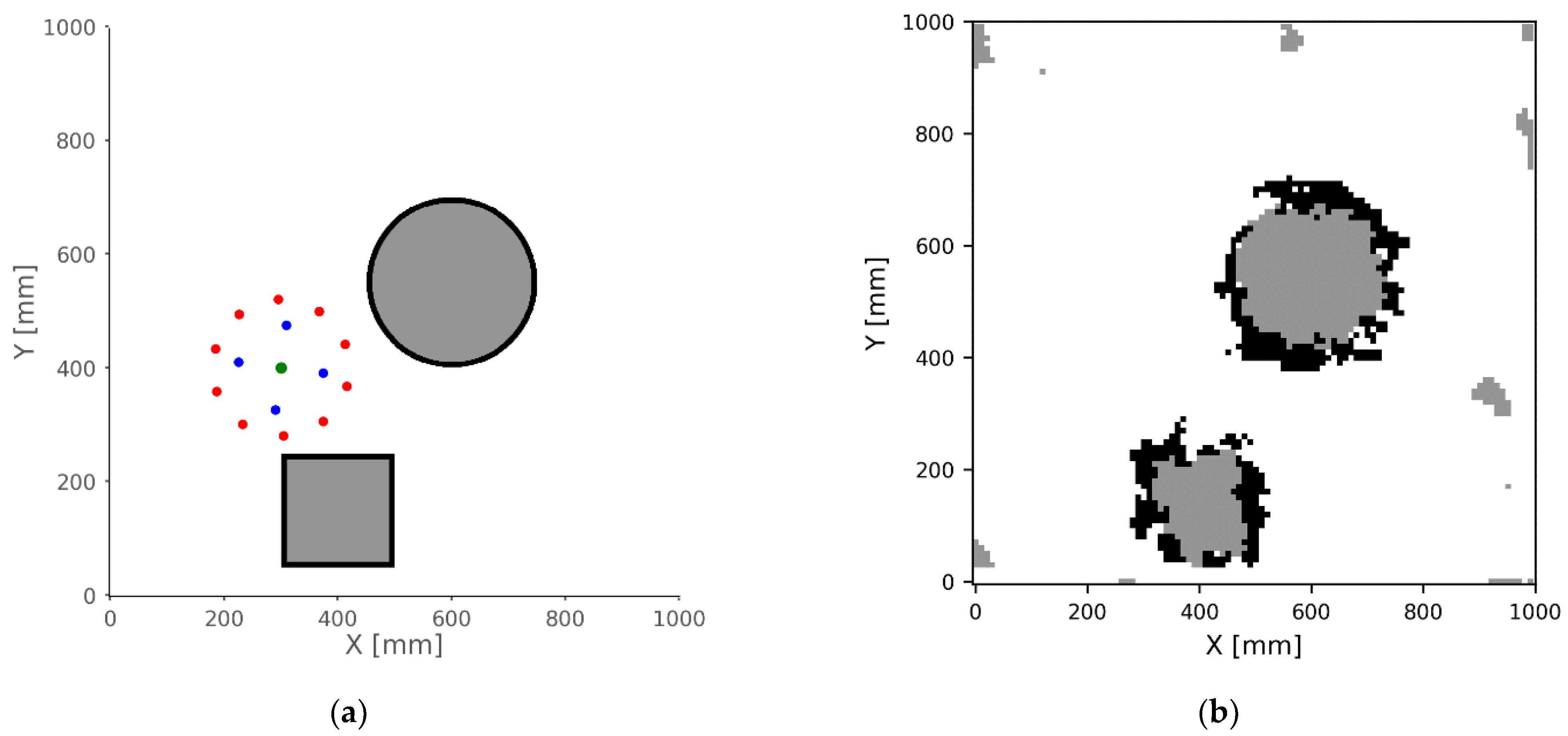
5.2. 1000 × 1000 mm2 Non-Enclosed Environment
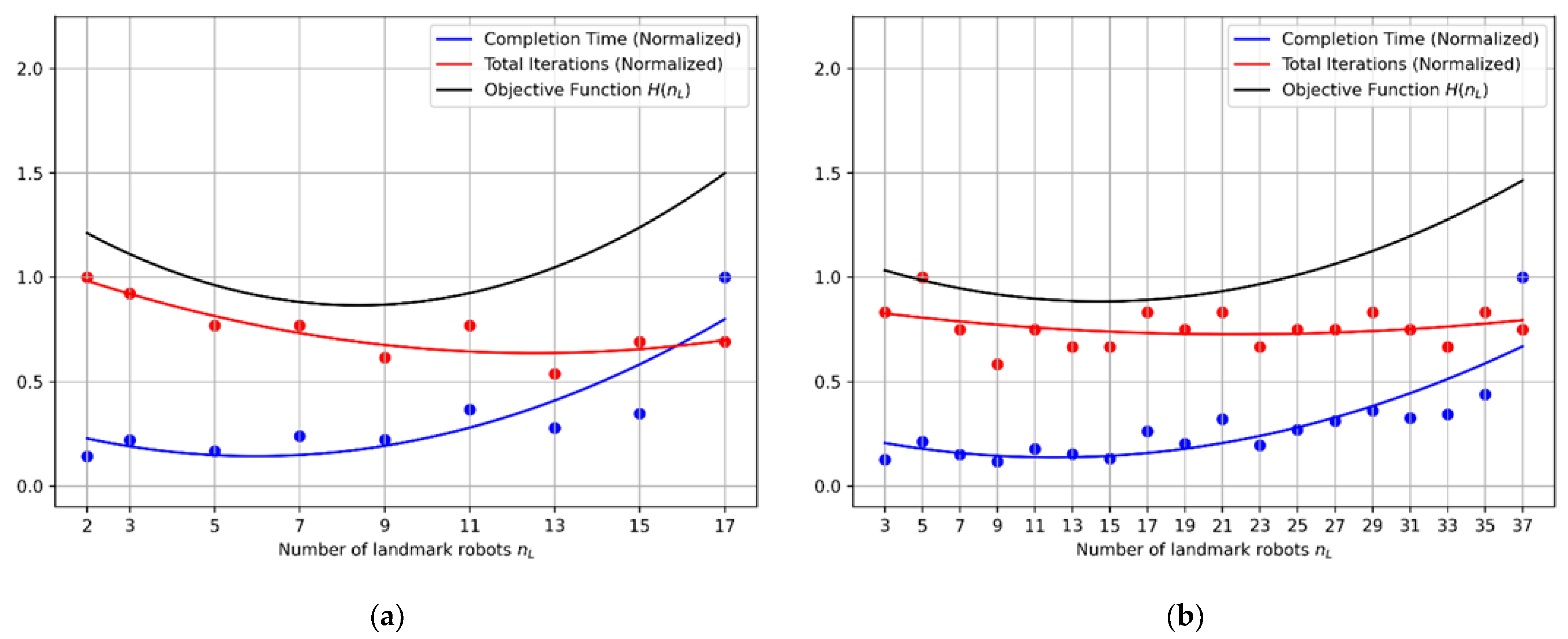
5.3. Impact of Relative Number of Landmark Robots
5.4. Comparison with Random Landmark Placement
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Nomenclature
| Symbol | Description |
| Fixed global reference frame | |
| Location of home base with respect to global reference frame | |
| Number of landmark robots | |
| Number of mapper robots | |
| Label of mapper robot | |
| Label of landmark robot | |
| Set of planned landmark positions at kth iteration | |
| Planned position of landmark robot | |
| Estimated landmark positions at kth iteration | |
| Estimated position of landmark robot | |
| Occupancy grid map | |
| pij | Probability of occupancy of cell in map located at i-th row and j-th column |
| Distinct frontier region in map | |
| q | Arbitrary set of landmark robot nodes |
| Information gain of set of nodes | |
| Maximum distance between robots for inter-robot sensing and communication | |
| Radius of maximum allowable distance away from the landmark robots for the mapper robots to travel | |
| Inter-robot sensor measurement of distance and bearing to Robot as measured by Robot | |
| Set of inter-robot sensor measurements taken by Robot of all robots within | |
| Exteroceptive sensor measurement of the environment (i.e., measurement from laser distance sensor) taken by Robot at time | |
| Data packet of sensor measurements sent by Robot at time | |
| ws | Pre-set threshold for what percent of the exploration area surrounding the landmark robots should be mapped before moving the landmarks |
| wi | Pre-set threshold on normalized information gain to consider a frontier as fully explorable (Appendix A) |
Appendix A. Maximum Information Gain


References
- Şahin, E. Swarm Robotics: From Sources of Inspiration to Domains of Application. In Swarm Robotics; Springer: Berlin/Heidelberg, Germany, 2005; pp. 10–20. [Google Scholar] [CrossRef]
- Heinrich, M.K.; Soorati, M.D.; Kaiser, T.K.; Wahby, M.; Hamann, H. Swarm robotics: Robustness, scalability, and self-X features in industrial applications. Inf. Technol. 2019, 61, 159–167. [Google Scholar] [CrossRef]
- Schranz, M.; Umlauft, M.; Sende, M.; Elmenreich, W. Swarm Robotic Behaviors and Current Applications. Front. Robot. AI 2020, 7, 36. Available online: https://www.frontiersin.org/articles/10.3389/frobt.2020.00036 (accessed on 1 September 2022). [CrossRef] [PubMed]
- Brambilla, M.; Ferrante, E.; Birattari, M.; Dorigo, M. Swarm robotics: A review from the swarm engineering perspective. Swarm Intell. 2013, 7, 1–41. [Google Scholar] [CrossRef]
- Hamann, H. Swarm Robotics: A Formal Approach; Springer International Publishing: Cham, Switzerland, 2018; ISBN 978-3-319-74526-8. [Google Scholar]
- Kim, J.Y.; Colaco, T.; Kashino, Z.; Nejat, G.; Benhabib, B. mROBerTO: A modular millirobot for swarm-behavior studies. In Proceedings of the 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Daejeon, Republic of Korea, 9–14 October 2016; pp. 2109–2114. [Google Scholar] [CrossRef]
- Kim, J.Y.; Kashino, Z.; Colaco, T.; Nejat, G.; Benhabib, B. Design and implementation of a millirobot for swarm studies–mROBerTO. Robotica 2018, 36, 1591–1612. [Google Scholar] [CrossRef]
- Eshaghi, K.; Li, Y.; Kashino, Z.; Nejat, G.; Benhabib, B. mROBerTO 2.0–An Autonomous Millirobot with Enhanced Locomotion for Swarm Robotics. IEEE Robot. Autom. Lett. 2020, 5, 962–969. [Google Scholar] [CrossRef]
- Drisdelle, R.; Kashino, Z.; Pineros, L.; Kim, J.Y.; Nejat, G.; Benhabib, B. Motion Control of a Wheeled Millirobot. In Proceedings of the 4th International Conference of Control, Dynamic Systems, and Robotics (CDSR 2017), Toronto, ON, Canada, 21–23 August 2017. [Google Scholar]
- Eshaghi, K.; Kashino, Z.; Yoon, H.J.; Nejat, G.; Benhabib, B. An inchworm-inspired motion strategy for robotic swarms. Robotica 2021, 39, 2283–2305. [Google Scholar] [CrossRef]
- Eshaghi, K.; Rogers, A.; Nejat, G.; Benhabib, B. Closed-Loop Motion Control of Robotic Swarms—A Tether-Based Strategy. IEEE Trans. Robot. 2022, 38, 3564–3581. [Google Scholar] [CrossRef]
- Chung, S.-J.; Paranjape, A.A.; Dames, P.; Shen, S.; Kumar, V. A Survey on Aerial Swarm Robotics. IEEE Trans. Robot. 2018, 34, 837–855. [Google Scholar] [CrossRef]
- Abdelkader, M.; Güler, S.; Jaleel, H.; Shamma, J.S. Aerial Swarms: Recent Applications and Challenges. Curr. Robot. Rep. 2021, 2, 309–320. [Google Scholar] [CrossRef]
- Wang, X.; Tan, G.; Dai, Y.; Lu, F.; Zhao, J. An Optimal Guidance Strategy for Moving-Target Interception by a Multirotor Unmanned Aerial Vehicle Swarm. IEEE Access 2020, 8, 121650–121664. [Google Scholar] [CrossRef]
- Shi, G.; Hönig, W.; Yue, Y.; Chung, S.-J. Neural-Swarm: Decentralized Close-Proximity Multirotor Control Using Learned Interactions. In Proceedings of the 2020 IEEE International Conference on Robotics and Automation (ICRA 2020), Paris, France, 31 May 2020–31 August 2020; pp. 3241–3247. [Google Scholar] [CrossRef]
- Shi, G.; Hönig, W.; Shi, X.; Yue, Y.; Chung, S.-J. Neural-Swarm2: Planning and Control of Heterogeneous Multirotor Swarms Using Learned Interactions. IEEE Trans. Robot. 2022, 38, 1063–1079. [Google Scholar] [CrossRef]
- Hönig, W.; Preiss, J.A.; Kumar, T.K.S.; Sukhatme, G.S.; Ayanian, N. Trajectory Planning for Quadrotor Swarms. IEEE Trans. Robot. 2018, 34, 856–869. [Google Scholar] [CrossRef]
- Vardy, A. Orbital Construction: Swarms of Simple Robots Building Enclosures. In Proceedings of the 2018 IEEE 3rd International Workshops on Foundations and Applications of Self* Systems (FAS*W), Trento, Italy, 3–7 September 2018; pp. 147–153. [Google Scholar] [CrossRef]
- Eschke, C.; Heinrich, M.K.; Wahby, M.; Haman, H. Self-Organized Adaptive Paths in Multi-Robot Manufacturing: Reconfigurable and Pattern-Independent Fibre Deployment. In Proceedings of the 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Macau, China, 3–8 November 2019; pp. 4086–4091. [Google Scholar] [CrossRef]
- Innocente, M.S.; Grasso, P. Self-organising swarms of firefighting drones: Harnessing the power of collective intelligence in decentralised multi-robot systems. J. Comput. Sci. 2019, 34, 80–101. [Google Scholar] [CrossRef]
- Neumann, P.P.; Hirschberger, P.; Baurzhan, Z.; Tiebe, C.; Hofmann, M.; Hüllmann, D.; Bartholmai, M. Indoor Air Quality Monitoring using flying Nanobots: Design and Experimental Study. In Proceedings of the 2019 IEEE International Symposium on Olfaction and Electronic Nose (ISOEN), Fukuoka, Japan, 26–29 May 2019; pp. 1–3. [Google Scholar] [CrossRef]
- Macwan, A.; Nejat, G.; Benhabib, B. Target-Motion Prediction for Robotic Search and Rescue in Wilderness Environments. IEEE Trans. Syst. Man Cybern. Part B Cybern. 2011, 41, 1287–1298. [Google Scholar] [CrossRef]
- Macwan, A.; Nejat, G.; Benhabib, B. Optimal deployment of robotic teams for autonomous wilderness search and rescue. In Proceedings of the 2011 IEEE/RSJ International Conference on Intelligent Robots and Systems, San Francisco, CA, USA, 25–30 September 2011; pp. 4544–4549. [Google Scholar] [CrossRef]
- Bakhtari, A.; Naish, M.D.; Eskandari, M.; Croft, E.A.; Benhabib, B. Active-vision-based multisensor surveillance—An implementation. IEEE Trans. Syst. Man Cybern. Part C Appl. Rev. 2006, 36, 668–680. [Google Scholar] [CrossRef]
- Thrun, S. Robotic Mapping: A Survey. In Exploring Artificial Intelligence in the New Millennium; Lakemeyer, G., Nebel, B., Eds.; Morgan Kaufmann Publishers Inc.: San Francisco, CA, USA, 2003; pp. 1–35. ISBN 978-1-55860-811-5. [Google Scholar]
- Chaves, R.; Rezeck, P.; Chaimowicz, L. SwarMap: Occupancy Grid Mapping with a Robotic Swarm. In Proceedings of the 2019 19th International Conference on Advanced Robotics (ICAR), Belo Horizonte, Brazil, 2–6 December 2019; pp. 727–732. [Google Scholar] [CrossRef]
- Kegeleirs, M.; Garzón Ramos, D.; Birattari, M. Random Walk Exploration for Swarm Mapping. In Towards Autonomous Robotic Systems; Althoefer, K., Konstantinova, J., Zhang, K., Eds.; Springer International Publishing: Cham, Switzerland, 2019; pp. 211–222. [Google Scholar] [CrossRef]
- Pires, A.G.; Rezeck, P.A.F.; Chaves, R.A.; Macharet, D.G.; Chaimowicz, L. Cooperative Localization and Mapping with Robotic Swarms. J. Intell. Robot. Syst. 2021, 102, 47. [Google Scholar] [CrossRef]
- Thrun, S.; Bü, A. Integrating Grid-Based and Topological Maps for Mobile Robot Navigation. In Proceedings of the 13th National Conference on Artificial Intelligence-Volume 2, Portland, OR, USA, 4–8 August 1996; pp. 944–950. [Google Scholar]
- Teymouri, M.S.; Bhattacharya, S. Landmark-based Distributed Topological Mapping and Navigation in GPS-denied Urban Environments Using Teams of Low-cost Robots. arXiv 2021, arXiv:2103.03741. Available online: http://arxiv.org/abs/2103.03741 (accessed on 10 May 2022).
- Ramaithitima, R.; Whitzer, M.; Bhattacharya, S.; Kumar, V. Automated Creation of Topological Maps in Unknown Environments Using a Swarm of Resource-Constrained Robots. IEEE Robot. Autom. Lett. 2016, 1, 746–753. [Google Scholar] [CrossRef]
- Ramachandran, R.K.; Elamvazhuthi, K.; Berman, S. An Optimal Control Approach to Mapping GPS-Denied Environments Using a Stochastic Robotic Swarm. In Robotics Research; Bicchi, A., Burgard, W., Eds.; Springer International Publishing: Cham, Switzerland, 2018; Volume 2, pp. 477–493. [Google Scholar] [CrossRef]
- Dirafzoon, A.; Lobaton, E. Topological mapping of unknown environments using an unlocalized robotic swarm. In Proceedings of the 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems, Tokyo, Japan, 3–7 November 2013; pp. 5545–5551. [Google Scholar] [CrossRef]
- Dirafzoon, A.; Betthauser, J.; Schornick, J.; Benavides, D.; Lobaton, E. Mapping of unknown environments using minimal sensing from a stochastic swarm. In Proceedings of the 2014 IEEE/RSJ International Conference on Intelligent Robots and Systems, Chicago, IL, USA, 14–18 September 2014; pp. 3842–3849. [Google Scholar] [CrossRef]
- Dirafzoon, A.; Bozkurt, A.; Lobaton, E. A framework for mapping with biobotic insect networks: From local to global maps. Robot. Auton. Syst. 2017, 88, 79–96. [Google Scholar] [CrossRef]
- Ramachandran, R.K.; Wilson, S.; Berman, S. A Probabilistic Topological Approach to Feature Identification Using a Stochastic Robotic Swarm. In Distributed Autonomous Robotic Systems; Groß, R., Kolling, A., Berman, S., Frazzoli, E., Martinoli, A., Matsuno, F., Gauci, M., Eds.; Springer International Publishing: Cham, Switzerland, 2018; Volume 6, pp. 3–16. [Google Scholar] [CrossRef]
- Batinović, A.; Oršulić, J.; Petrović, T.; Bogdan, S. Decentralized Strategy for Cooperative Multi-Robot Exploration and Mapping. IFAC-PapersOnLine 2020, 53, 9682–9687. [Google Scholar] [CrossRef]
- Choudhary, S.; Carlone, L.; Nieto, C.; Rogers, J.; Christensen, H.I.; Dellaert, F. Distributed mapping with privacy and communication constraints: Lightweight algorithms and object-based models. Int. J. Robot. Res. 2017, 36, 1286–1311. [Google Scholar] [CrossRef]
- Ramachandran, R.K.; Kakish, Z.; Berman, S. Information Correlated Lévy Walk Exploration and Distributed Mapping Using a Swarm of Robots. IEEE Trans. Robot. 2020, 36, 1422–1441. [Google Scholar] [CrossRef]
- Bayer, J.; Faigl, J. Decentralized Topological Mapping for Multi-robot Autonomous Exploration under Low-Bandwidth Communication. In Proceedings of the 2021 European Conference on Mobile Robots (ECMR), Bonn, Germany, 31 August 2021–3 September 2021; pp. 1–7. [Google Scholar] [CrossRef]
- Kit, J.L.; Dharmawan, A.G.; Mateo, D.; Foong, S.; Soh, G.S.; Bouffanais, R.; Wood, K.L. Decentralized Multi-Floor Exploration by a Swarm of Miniature Robots Teaming with Wall-Climbing Units. arXiv 2019, arXiv:1908.05822. Available online: http://arxiv.org/abs/1908.05822 (accessed on 11 May 2022).
- Rone, W.; Ben-Tzvi, P. Mapping, localization and motion planning in mobile multi-robotic systems. Robotica 2013, 31, 1–23. [Google Scholar] [CrossRef]
- Saeedi, S.; Trentini, M.; Seto, M.; Li, H. Multiple-Robot Simultaneous Localization and Mapping: A Review. J. Field Robot. 2016, 33, 3–46. [Google Scholar] [CrossRef]
- Barca, J.C.; Sekercioglu, Y.A. Swarm robotics reviewed. Robotica 2013, 31, 345–359. [Google Scholar] [CrossRef]
- Sutantyo, D.K.; Kernbach, S.; Levi, P.; Nepomnyashchikh, V.A. Multi-robot searching algorithm using Lévy flight and artificial potential field. In Proceedings of the 2010 IEEE Safety Security and Rescue Robotics, Bremen, Germany, 26–30 July 2010; pp. 1–6. [Google Scholar] [CrossRef]
- Schroeder, A.; Ramakrishnan, S.; Kumar, M.; Trease, B. Efficient spatial coverage by a robot swarm based on an ant foraging model and the Lévy distribution. Swarm Intell. 2017, 11, 39–69. [Google Scholar] [CrossRef]
- Pang, B.; Song, Y.; Zhang, C.; Wang, H.; Yang, R. A Swarm Robotic Exploration Strategy Based on an Improved Random Walk Method. J. Robot. 2019, 2019, 6914212. [Google Scholar] [CrossRef]
- Dimidov, C.; Oriolo, G.; Trianni, V. Random Walks in Swarm Robotics: An Experiment with Kilobots. In Swarm Intelligence; Springer International Publishing: Cham, Switzerland, 2016; pp. 185–196. [Google Scholar] [CrossRef]
- Kim, J.Y.; Kashino, Z.; Pineros, L.M.; Bayat, S.; Colaco, T.; Nejat, G.; Benhabib, B. A high-performance millirobot for swarm-behaviour studies: Swarm-topology estimation. Int. J. Adv. Robot. Syst. 2019, 16, 172988141989212. [Google Scholar] [CrossRef]
- Kohlbacher, A.; Eliasson, J.; Acres, K.; Chung, H.; Barca, J.C. A low cost omnidirectional relative localization sensor for swarm applications. In Proceedings of the 2018 IEEE 4th World Forum on Internet of Things (WF-IoT), Singapore, 5–8 February 2018; pp. 694–699. [Google Scholar] [CrossRef]
- Liu, L.; Fine, B.; Shell, D.; Klappenecker, A. Approximate characterization of multi-robot swarm “shapes” in sublinear-time. In Proceedings of the 2011 IEEE International Conference on Robotics and Automation, Shanghai, China, 9–13 May 2011; pp. 2886–2891. [Google Scholar] [CrossRef]
- Carrillo-Arce, L.C.; Nerurkar, E.D.; Gordillo, J.L.; Roumeliotis, S.I. Decentralized multi-robot cooperative localization using covariance intersection. In Proceedings of the 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems, Tokyo, Japan, 3–7 November 2013; pp. 1412–1417. [Google Scholar] [CrossRef]
- de Sá, A.O.; Nedjah, N.; de M Mourelle, L. Distributed and resilient localization algorithm for Swarm Robotic Systems. Appl. Soft Comput. 2017, 57, 738–750. [Google Scholar] [CrossRef]
- Inoue, D.; Murai, D.; Ikuta, Y.; Yoshida, H. Distributed Range-based Localization for Swarm Robot Systems using Sensor-fusion Technique. In Proceedings of the 8th International Conference on Sensor Networks, Prague, Czech Republic, 26–27 February 2019; pp. 13–22. [Google Scholar] [CrossRef]
- Cornejo, A.; Nagpal, R. Distributed Range-Based Relative Localization of Robot Swarms; Springer International Publishing: Cham, Switzerland, 2015; Volume 107, pp. 91–107. [Google Scholar]
- Klingner, J.; Ahmed, N.; Correll, N. Fault-tolerant Covariance Intersection for localizing robot swarms. Robot. Auton. Syst. 2019, 122, 103306. [Google Scholar] [CrossRef]
- de Sá, A.O.; Nedjah, N.; de M Mourelle, L. Multi-hop Collaborative Min-Max localization. In Proceedings of the 2015 IEEE 6th Latin American Symposium on Circuits & Systems (LASCAS), Montevideo, Uruguay, 24–27 February 2015; pp. 1–4. [Google Scholar] [CrossRef]
- Ma, D.; Er, M.J.; Wang, B.; Lim, H.B. Range-free wireless sensor networks localization based on hop-count quantization. Telecommun. Syst. 2012, 50, 199–213. [Google Scholar] [CrossRef]
- Loefgren, I.; Ahmed, N.; Frew, E.; Heckman, C.; Humbert, S. Scalable Event-Triggered Data Fusion for Autonomous Cooperative Swarm Localization. In Proceedings of the 2019 22th International Conference on Information Fusion (FUSION), Ottawa, ON, Canada, 2–5 July 2019; pp. 1–8. [Google Scholar]
- Fukui, S.; Naruse, K. Swarm EKF Localization for a Multiple Robot System with Range-Only Measurements; Springer International Publishing: Cham, Switzerland, 2013; pp. 91–103. [Google Scholar] [CrossRef]
- Elfes, A. Using occupancy grids for mobile robot perception and navigation. Computer 1989, 22, 46–57. [Google Scholar] [CrossRef]
- González-Baños, H.H.; Latombe, J.-C. Navigation Strategies for Exploring Indoor Environments. Int. J. Robot. Res. 2002, 21, 829–848. [Google Scholar] [CrossRef]
- Thrun, S. Probabilistic robotics. Commun. ACM 2002, 45, 52–57. [Google Scholar] [CrossRef]
- Yamauchi, B. A frontier-based approach for autonomous exploration. In Proceedings of the 1997 IEEE International Symposium on Computational Intelligence in Robotics and Automation CIRA’97. “Towards New Computational Principles for Robotics and Automation”, Monterey, CA, USA, 10–11 July 1997; pp. 146–151. [Google Scholar] [CrossRef]
- Katoch, S.; Chauhan, S.S.; Kumar, V. A review on genetic algorithm: Past, present, and future. Multimed. Tools Appl. 2021, 80, 8091–8126. [Google Scholar] [CrossRef] [PubMed]
- Hart, P.E.; Nilsson, N.J.; Raphael, B. A Formal Basis for the Heuristic Determination of Minimum Cost Paths. IEEE Trans. Syst. Sci. Cybern. 1968, 4, 100–107. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Category | Description | Pros | Cons |
|---|---|---|---|
| Proposed strategy: Heterogenous swarms with limited exteroceptive-sensing |
|
|
|
| Homogeneous swarms with limited exteroceptive-sensing [26,27,28,45,46,47,48] |
|
|
|
| Topological mapping using swarms with limited exteroceptive-sensing [30,31,32,33,34,35,36] |
|
|
|
| Robotic systems with “high-information” exteroceptive-sensors [37,38,39,40,41] |
|
|
|
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rogers, A.; Eshaghi, K.; Nejat, G.; Benhabib, B. Occupancy Grid Mapping via Resource-Constrained Robotic Swarms: A Collaborative Exploration Strategy. Robotics 2023, 12, 70. https://doi.org/10.3390/robotics12030070
Rogers A, Eshaghi K, Nejat G, Benhabib B. Occupancy Grid Mapping via Resource-Constrained Robotic Swarms: A Collaborative Exploration Strategy. Robotics. 2023; 12(3):70. https://doi.org/10.3390/robotics12030070
Chicago/Turabian StyleRogers, Andrew, Kasra Eshaghi, Goldie Nejat, and Beno Benhabib. 2023. "Occupancy Grid Mapping via Resource-Constrained Robotic Swarms: A Collaborative Exploration Strategy" Robotics 12, no. 3: 70. https://doi.org/10.3390/robotics12030070
APA StyleRogers, A., Eshaghi, K., Nejat, G., & Benhabib, B. (2023). Occupancy Grid Mapping via Resource-Constrained Robotic Swarms: A Collaborative Exploration Strategy. Robotics, 12(3), 70. https://doi.org/10.3390/robotics12030070