



Tethered Unmanned Aerial Vehicles—A Systematic Review
 ,
,  ,
,  and
and
Abstract
:1. Introduction
Systematic Review Objectives
- For what applications are tUAVs most used in recent literature?
- What are the aerial vehicle propulsion methods with the best results for each application?
- What are the flight parameters (e.g., altitude and air velocity) used for each class of UAV?
- What are the tether characteristics (mechanical, electrical, and data-wise) for best performance?
- What mechanical interactions are considered during the system modeling and control design phases?
- Population: tUAVs.
- Intervention: aircraft, propulsion, and flight parameters.
- Comparison: not applicable for the current study.
- Outcomes: the aircraft and flight configurations to optimize the usage of tUAVs.
- Context: publications that utilize tUAVs in simulated and real environments.
2. Materials and Methods
- Does the paper refer to the system’s configuration?
- Are the aircraft parameters presented in the publication?
- Are the flight parameters presented in the publication? (altitude, velocity, flight path, etc.)
- Is the analysed scenario applied in real-world tests?
- Are the results of the tests explained in the publication?
- Is the application presented in the publication feasible with commercial or out-of-the-shelf resources?
- The first part contains the main population that the publication should be about, namely, “unmanned aerial vehicle” and its synonyms, such as “UAV” and “drone”;
- The second part is the context in which the main population should be applied, namely, “tethered” and its synonyms and two activities in which tUAVs are known to be used: “energy harvesting” and “fruit harvesting”. Both involve long term operations in energy-constrained environments that may use tUAVs as a solution to their requirements;
- The third and last part pertains to an application found in initial surveys of the main scope of this review that may fulfill the first two requisites of the search query but is outside of the application scope to be analysed in this review: tUAVs used in wireless power transfer environments.
3. Results
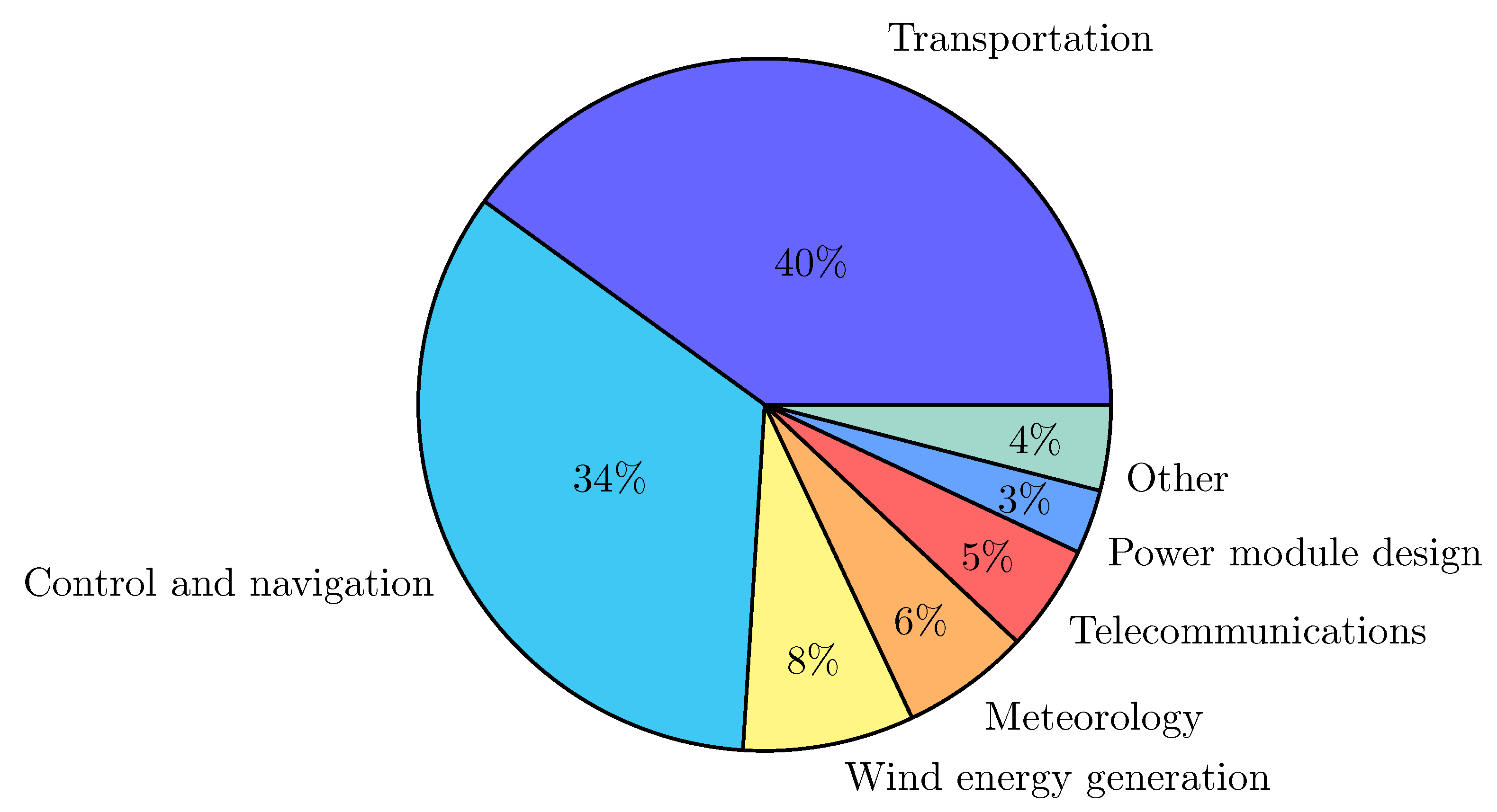
3.1. The Scope of the Publications
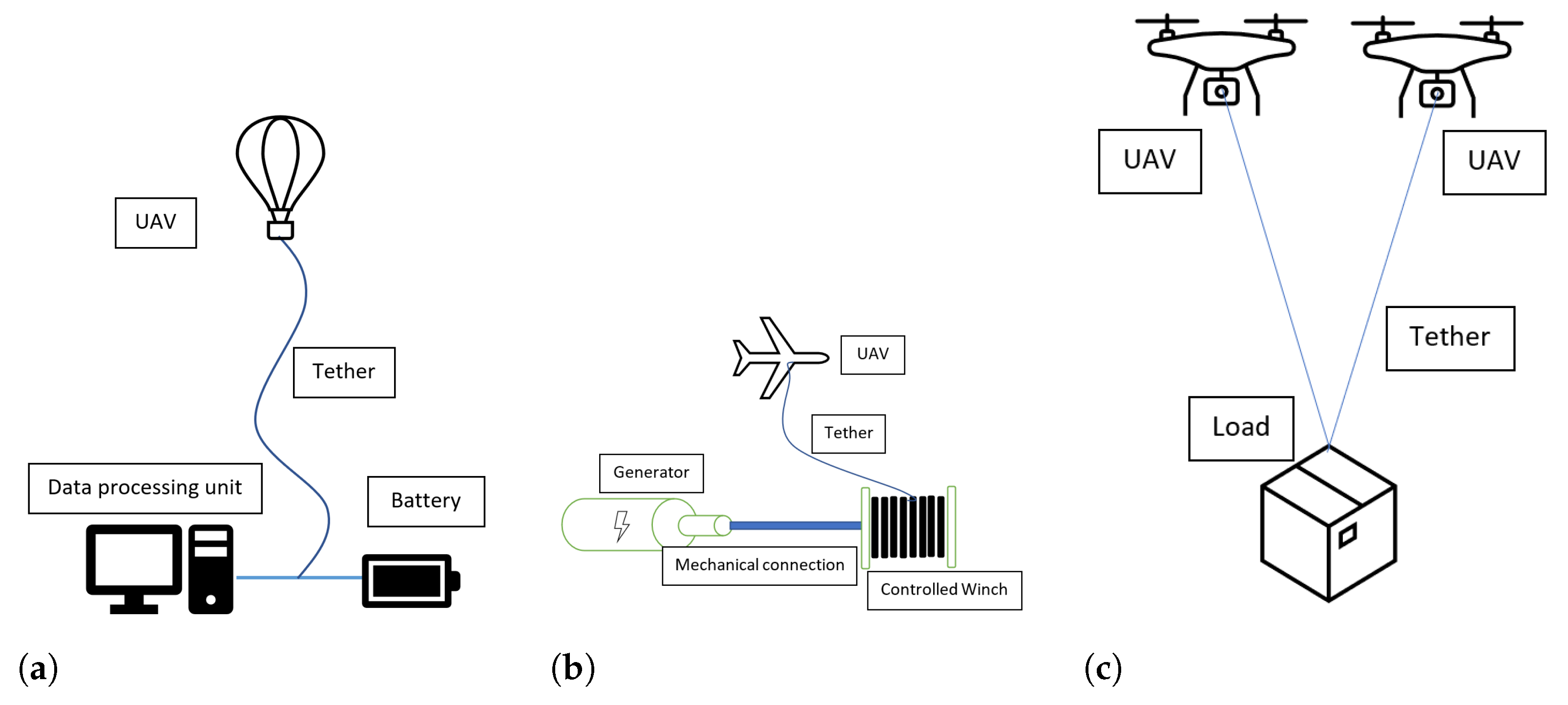
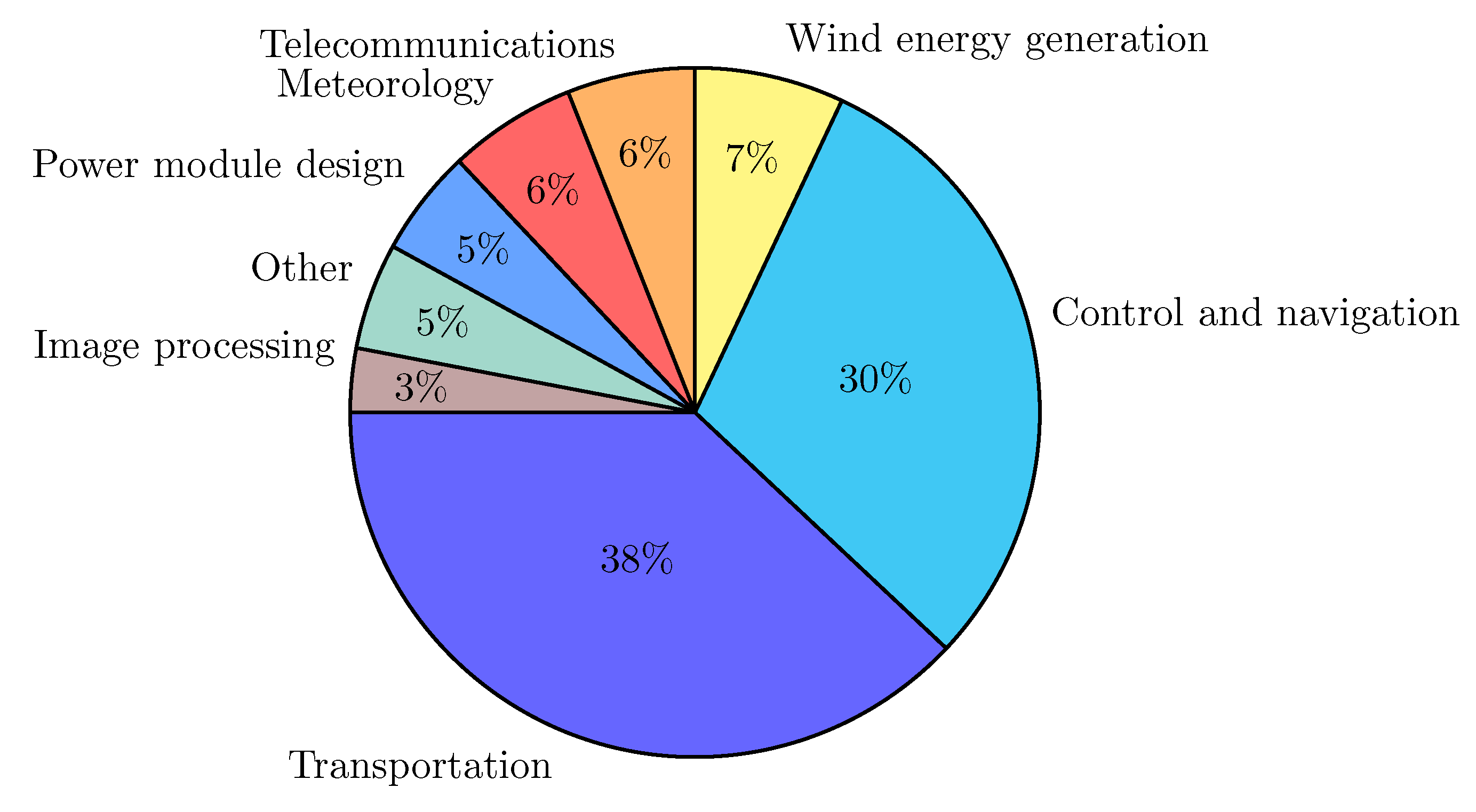
- Transportation: The use of one or more tUAVs to move payloads from one location to another using cables. Section 3.1.1 explores this scope in more detail;
- Control and navigation: The design of control blocks and navigation algorithms for tUAVs. Section 3.1.2 describes more details of this scope;
- Meteorology: tUAVs This group was used to measure air quality and meteorological parameters such as wind speed and humidity in long term missions. Section 3.1.3 explores this scope in more detail;
- Wind energy generation: Tethered UAVs used to collect wind force and transfer it through the tether to a generator on the ground;
- Telecommunications: Tethered UAVs used to extend the coverage of telecommunication networks for a temporary situation, either an event that temporarily increased network demand or in disaster situations where normal telecommunications were compromised due to infrastructure damage;
- Power module design: Publications focused on presenting solutions for powering tUAVs. Tackled the issues of transmitting energy from the ground to the aircraft;
- Image processing: Publications focused on converting images captured by tUAVs into useful information.
3.1.1. Transportation
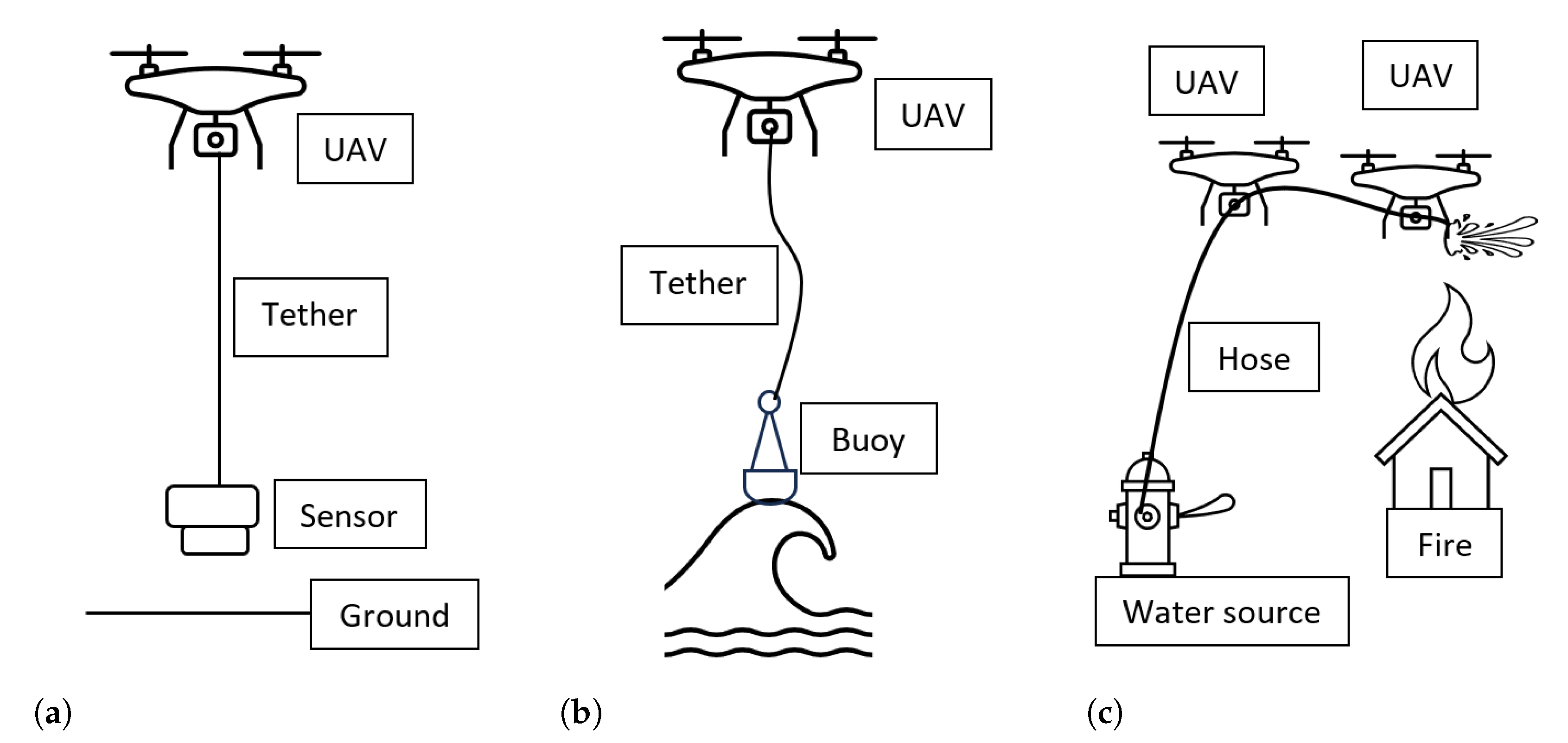
- Load transportation: where a load such as a delivery parcel [29], a weight [21], a planar platform [38], or a military payload [22] is transported by one [39] or more tUAVs [20] using a tether [23] or some other connection such as a rigid rod [42]. Some typical examples of the usage of tUAVs in this application are shown in Figure 7
3.1.2. Control and Navigation Scope
3.1.3. Meteorology
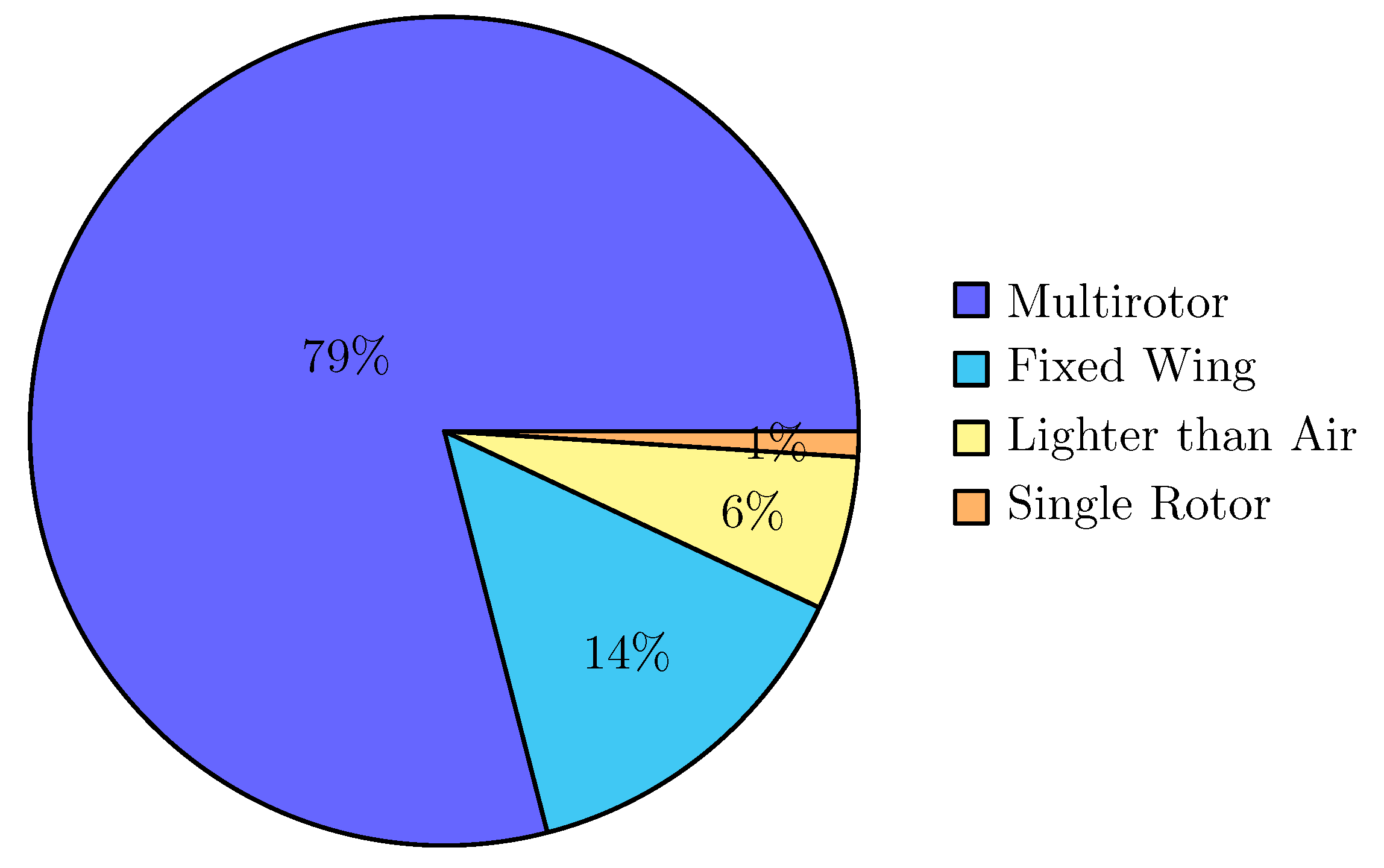
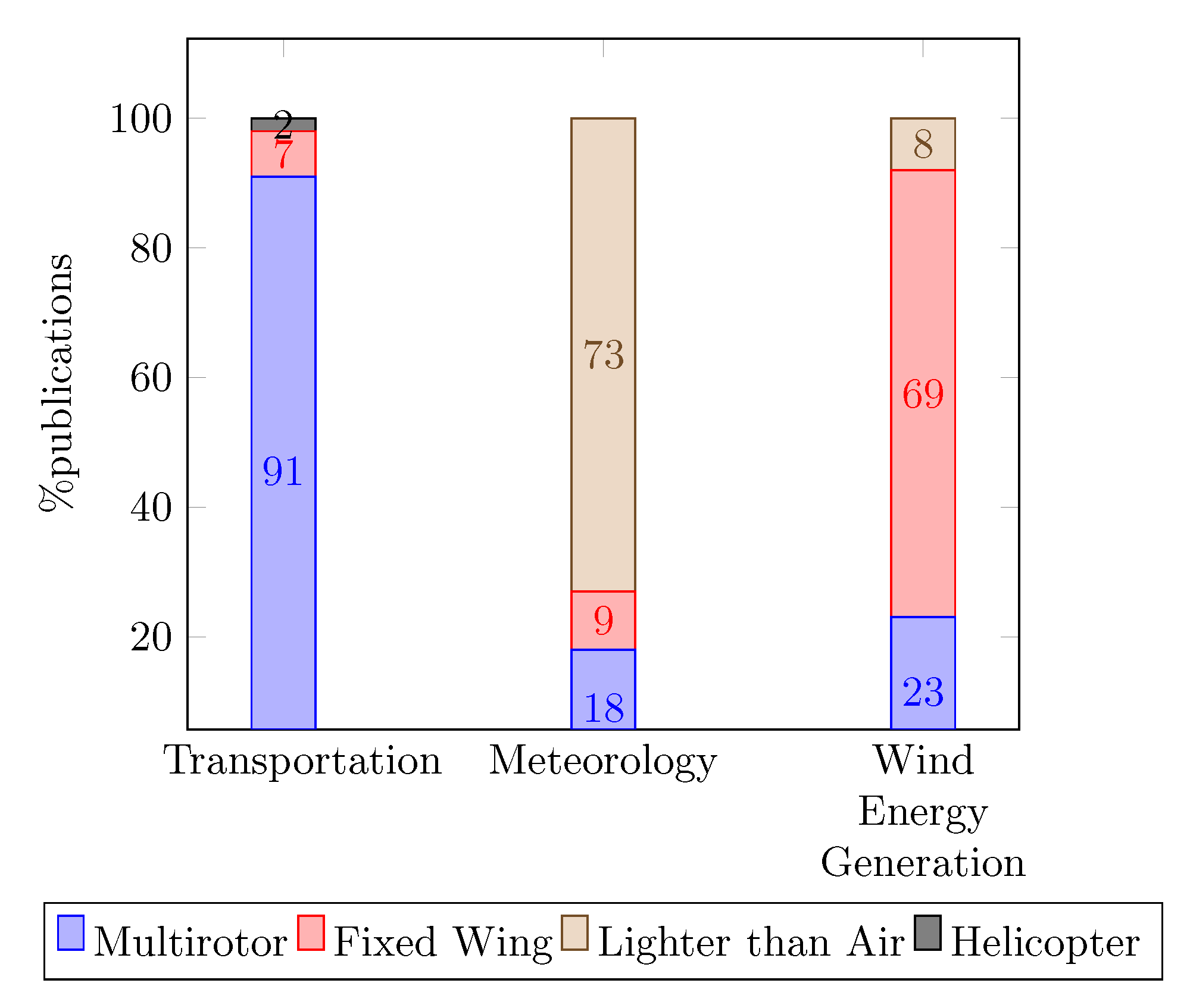
3.2. Propulsion Method
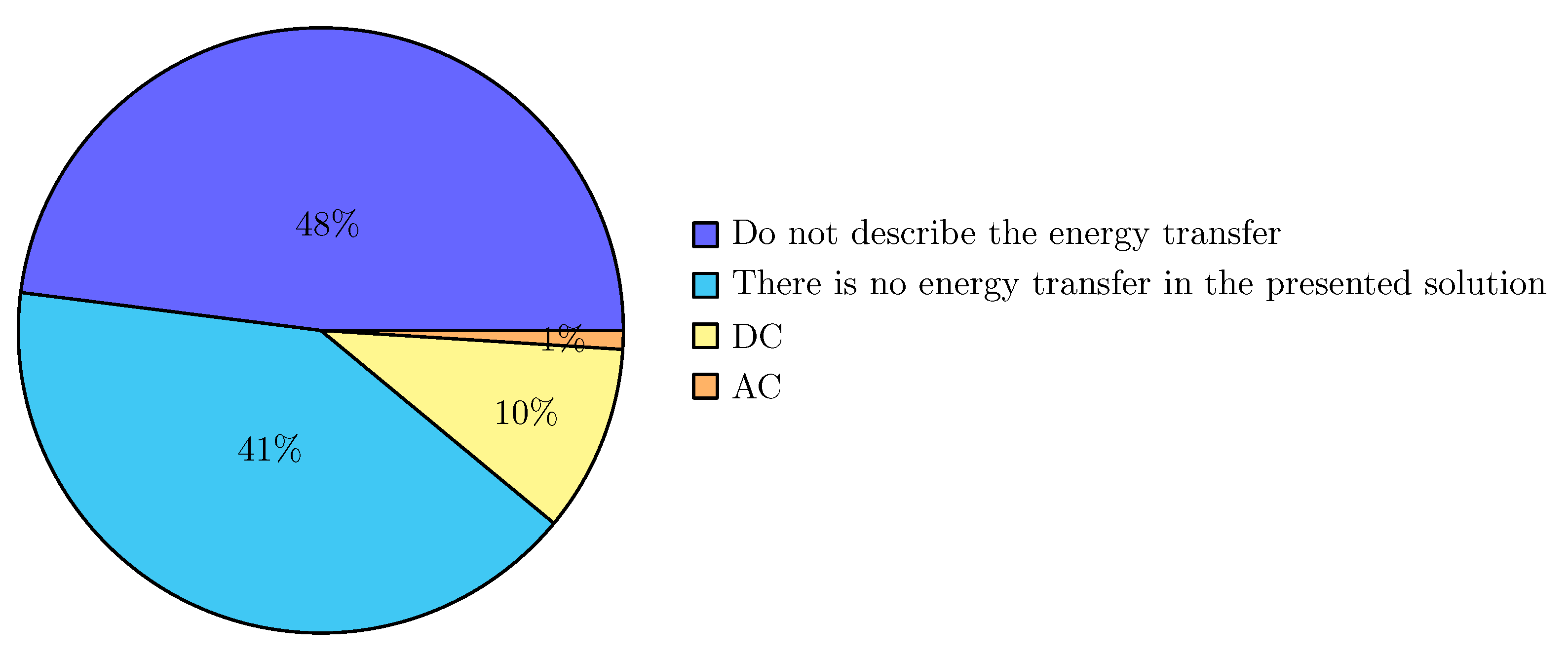
3.3. Energy Transfer Method
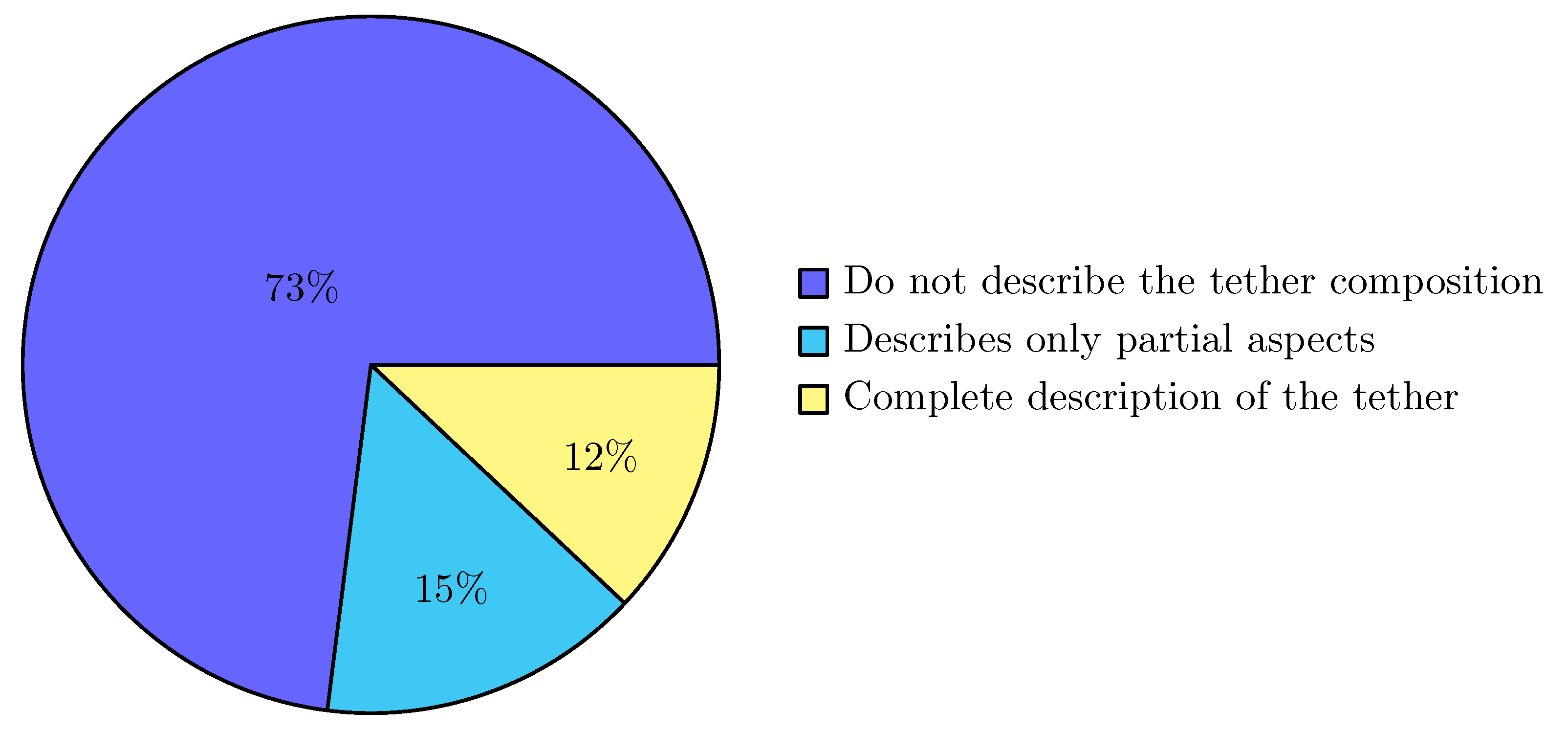
3.4. Tether Composition
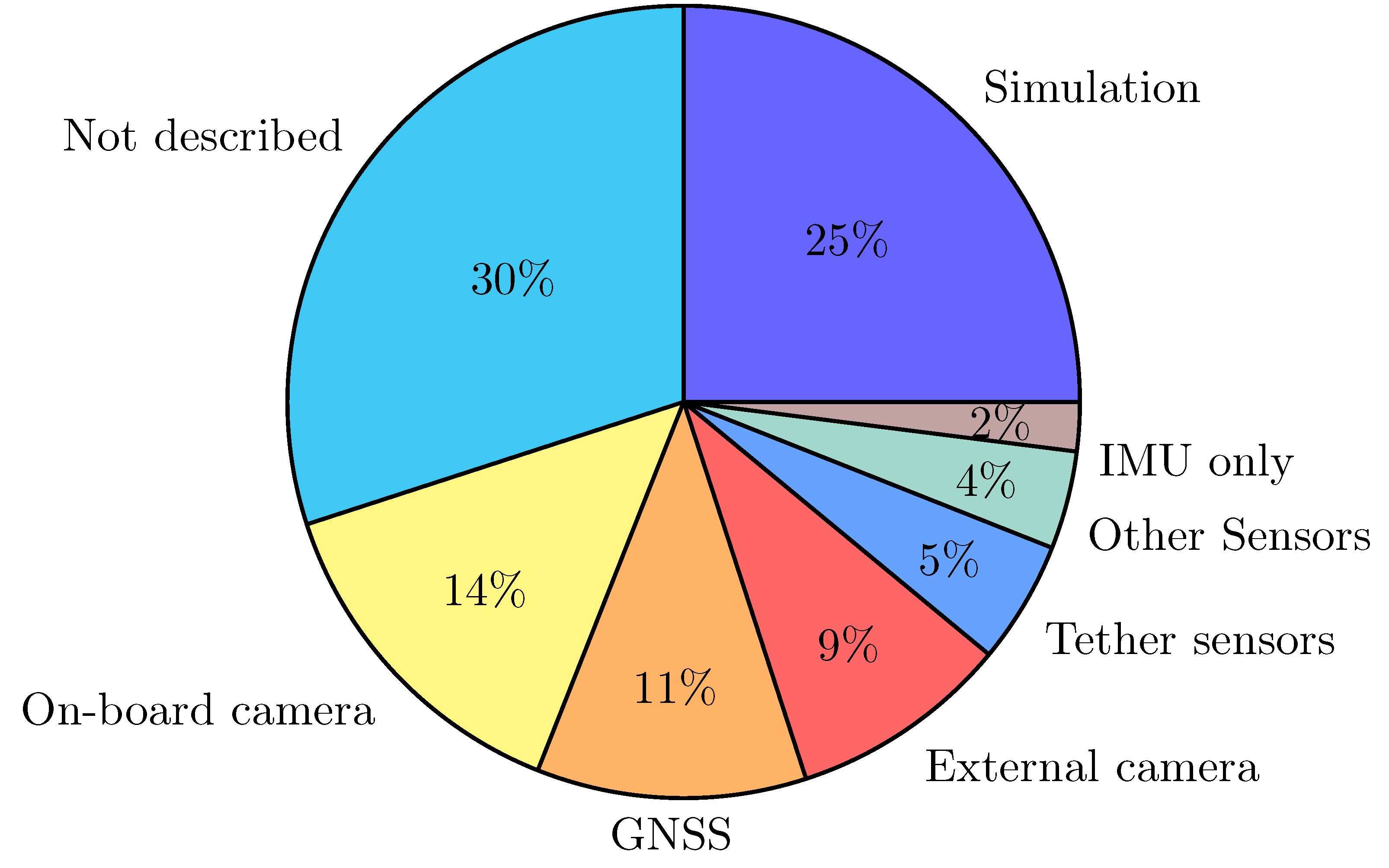
3.5. Perception Sensors
- The presence of a fixed point on the ground that may be better localised than the UAV (e.g., a meteorology station that has a known precise position) may provide a good starting guess, as well as the possibility to compute only the relative position between the UAV and the ground contact point;
- The tether mechanical information (e.g., the tension and angle) may provide a good estimation of the position of the UAV relative to a fixed point on the ground.
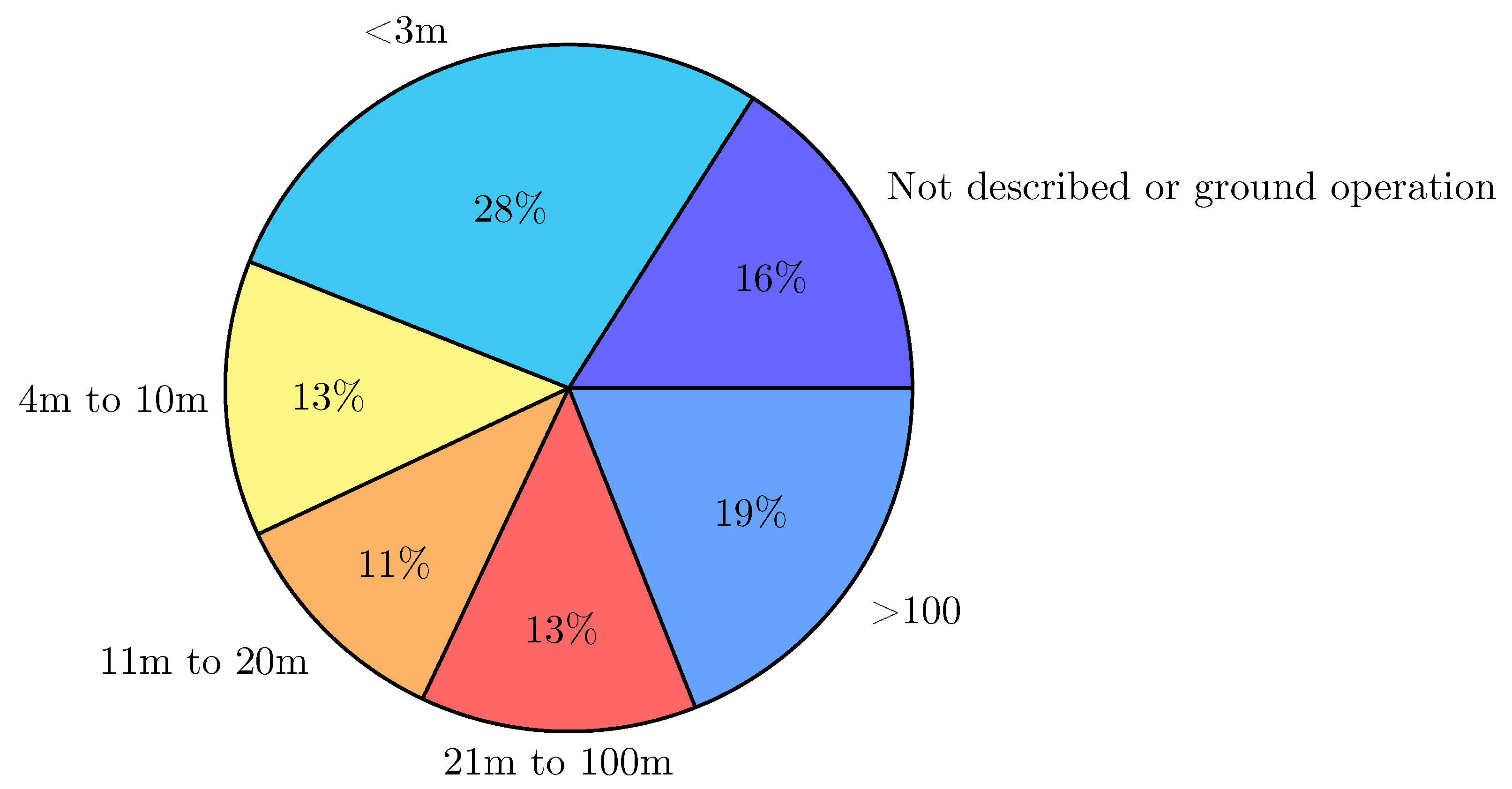
3.6. Operational Altitude
3.7. Control Technique
4. Discussion
- Compare different energy transfer techniques and parameters in selected scenarios while considering tUAVs and long-term operations;
- Employ effective use of vision algorithms related to the tether identification and pose estimation. This review showed that, once the tether pose is correctly estimated, the various control techniques are able to use that input to achieve various objectives (e.g.,: UAV stabilization and tether collision avoidance). The analysis also showed that vision techniques are able to perceive different aspects of the UAV’s environment. The unification of these two solutions can prove to be an advancement of the tUAV scope;
- Compare different processing architectures in tUAV scenarios. Given that there is the possibility to easily transfer data over the tether, what type of data is more suited to be processed by the UAV or by the ground station?
- The implementation of tUAVs in agricultural scenarios;
- Safety measures for the tUAV considering the presence of the tether;
- the localisation of the tUAV in consideration of the tether pose estimation and all parameters associated with it;
- Tether mechanical integrity estimation, especially considering long-term operation.
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Nikolic, J.; Burri, M.; Rehder, J.; Leutenegger, S.; Huerzeler, C.; Siegwart, R. A UAV system for inspection of industrial facilities. In Proceedings of the 2013 IEEE Aerospace Conference, Big Sky, MT, USA, 2–9 March 2013; pp. 1–8. [Google Scholar] [CrossRef] [Green Version]
- Meng, Y.; Song, J.; Lan, Y.; Mei, G.; Liang, Z.; Han, Y. Harvest aids efficacy applied by unmanned aerial vehicles on cotton crop. Ind. Crops Prod. 2019, 140, 111645. [Google Scholar] [CrossRef]
- Motlagh, N.H.; Bagaa, M.; Taleb, T. UAV-based IoT platform: A crowd surveillance use case. IEEE Commun. Mag. 2017, 55, 128–134. [Google Scholar] [CrossRef] [Green Version]
- Zhang, C.; Kovacs, J.M. The application of small unmanned aerial systems for precision agriculture: A review. Precis. Agric. 2012, 13, 693–712. [Google Scholar] [CrossRef]
- Stafford, J.V. Implementing Precision Agriculture in the 21st Century. J. Agric. Eng. Res. 2000, 76, 267–275. [Google Scholar] [CrossRef] [Green Version]
- Zhou, G.; Ambrosia, V.; Gasiewski, A.J.; Bland, G. Foreword to the Special Issue on Unmanned Airborne Vehicle (UAV) Sensing Systems for Earth Observations. IEEE Trans. Geosci. Remote Sens. 2009, 47, 687–689. [Google Scholar] [CrossRef]
- Boukoberine, M.N.; Zhou, Z.; Benbouzid, M. Power Supply Architectures for Drones—A Review. In Proceedings of the Industrial Electronics Conference (IECON), Lisbon, Portugal, 14–17 October 2019; pp. 5826–5831. [Google Scholar] [CrossRef]
- Chang, K.H.; Hung, S.K. Design and Implementation of a Tether-Powered Hexacopter for Long Endurance Missions. Appl. Sci. 2021, 11, 11887. [Google Scholar] [CrossRef]
- Belmekki, B.; Alouini, M.S. Unleashing the Potential of Networked Tethered Flying Platforms: Prospects, Challenges, and Applications. IEEE Open J. Veh. Technol. 2022, 3, 278–320. [Google Scholar] [CrossRef]
- Schardt, C.; Adams, M.B.; Owens, T.; Keitz, S.; Fontelo, P. Utilization of the PICO framework to improve searching PubMed for clinical questions. BMC Med. Inform. Decis. Mak. 2007, 7, 1–6. [Google Scholar] [CrossRef] [Green Version]
- Page, M.J.; Moher, D.; Bossuyt, P.M.; Boutron, I.; Hoffmann, T.C.; Mulrow, C.D.; Shamseer, L.; Tetzlaff, J.M.; Akl, E.A.; Brennan, S.E.; et al. PRISMA 2020 explanation and elaboration: Updated guidance and exemplars for reporting systematic reviews. BMJ 2021, 372, n160. [Google Scholar] [CrossRef]
- Parsifal. Available online: https://parsif.al/ (accessed on 1 June 2023).
- ACM Digital Library. Available online: http://portal.acm.org (accessed on 1 June 2023).
- Elsevier: Engineering Village. Available online: http://www.engineeringvillage.com (accessed on 1 June 2023).
- IEEE Digital Library. Available online: http://ieeexplore.ieee.org (accessed on 1 June 2023).
- ISI Web of Science. Available online: http://www.isiknowledge.com (accessed on 1 June 2023).
- Science@Direct. Available online: http://www.sciencedirect.com (accessed on 1 June 2023).
- Scopus. Available online: http://www.scopus.com (accessed on 1 June 2023).
- VOSviewer. Available online: https://www.vosviewer.com/ (accessed on 1 June 2023).
- Mohammadi, K.; Jafarinasab, M.; Sirouspour, S.; Dyer, E. Decentralized Motion Control in a Cabled-based Multi-drone Load Transport System. In Proceedings of the IEEE International Conference on Intelligent Robots and Systems, Madrid, Spain, 1–5 October 2018; pp. 4198–4203. [Google Scholar] [CrossRef]
- Eikyu, W.; Sekiguchi, K.; Nonaka, K. Nonlinear control for the extended model of the load-suspended UAV based on the experiments. IFAC-PapersOnLine 2021, 54, 90–95. [Google Scholar] [CrossRef]
- Su, Z.; Wang, X.; Wang, H. Neural-Adaptive Constrained Flight Control for Air-Ground Recovery Under Terrain Obstacles. IEEE Trans. Aerosp. Electron. Syst. 2022, 58, 374–390. [Google Scholar] [CrossRef]
- Erskine, J.; Chriette, A.; Caro, S. Wrench Analysis of Cable-Suspended Parallel Robots Actuated by Quadrotor Unmanned Aerial Vehicles. J. Mech. Robot. 2019, 11, 020909. [Google Scholar] [CrossRef] [Green Version]
- Guo, K.; Jia, J.; Yu, X.; Guo, L.; Xie, L. Multiple observers based anti-disturbance control for a quadrotor UAV against payload and wind disturbances. Control Eng. Pract. 2020, 102, 104560. [Google Scholar] [CrossRef]
- Sierra-García, J.E.; Santos, M. Intelligent control of an UAV with a cable-suspended load using a neural network estimator. Expert Syst. Appl. 2021, 183, 115380. [Google Scholar] [CrossRef]
- Gimenez, J.; Gandolfo, D.C.; Salinas, L.R.; Rosales, C.; Carelli, R. Multi-objective control for cooperative payload transport with rotorcraft UAVs. ISA Trans. 2018, 80, 491–502. [Google Scholar] [CrossRef] [PubMed]
- Romero, J.G.; Rodríguez-Cortés, H. Asymptotic stability for a transformed nonlinear UAV model with a suspended load via energy shaping. Eur. J. Control 2020, 52, 87–96. [Google Scholar] [CrossRef]
- Li, X.; Zhang, J.; Han, J. Trajectory planning of load transportation with multi-quadrotors based on reinforcement learning algorithm. Aerosp. Sci. Technol. 2021, 116, 106887. [Google Scholar] [CrossRef]
- Pizetta, I.H.B.; Brandão, A.S.; Sarcinelli-Filho, M. Avoiding obstacles in cooperative load transportation. ISA Trans. 2019, 91, 253–261. [Google Scholar] [CrossRef]
- Chen, T.; Shan, J. A novel cable-suspended quadrotor transportation system: From theory to experiment. Aerosp. Sci. Technol. 2020, 104, 105974. [Google Scholar] [CrossRef]
- Tartaglione, G.; D’Amato, E.; Ariola, M.; Rossi, P.S.; Johansen, T.A. Model predictive control for a multi-body slung-load system. Robot. Auton. Syst. 2017, 92, 1–11. [Google Scholar] [CrossRef]
- Meissen, C.; Klausen, K.; Arcak, M.; Fossen, T.I.; Packard, A. Passivity-based Formation Control for UAVs with a Suspended Load. Proc.-IEEE Int. Conf. Robot. Autom. 2017, 50, 13150–13155. [Google Scholar] [CrossRef]
- Li, Z.; Erskine, J.; Caro, S.; Chriette, A. Design and Control of a Variable Aerial Cable Towed System. IEEE Robot. Autom. Lett. 2020, 5, 636–643. [Google Scholar] [CrossRef] [Green Version]
- Merz, M.; Johansen, T. A strategy for robust precision control of an endbody being towed by an orbiting UAV. In Proceedings of the AIAA Guidance, Navigation, and Control Conference, Grapevine, TX, USA, 9–13 January 2017. [Google Scholar] [CrossRef] [Green Version]
- Su, Z.; Li, C.; Liu, Y. Anti-disturbance dynamic surface trajectory stabilization for the towed aerial recovery drogue under unknown airflow disturbances. Mech. Syst. Signal Process. 2021, 150, 107342. [Google Scholar] [CrossRef]
- Merz, M.; Johansen, T. Optimal path of a UAV engaged in wind-influenced circular towing. In Proceedings of the Workshop on Research, Education and Development of Unmanned Aerial Systems (RED-UAS), Linköping, Sweden, 3–5 October 2017; pp. 25–30. [Google Scholar] [CrossRef]
- Erskine, J.; Chriette, A.; Caro, S. Wrench capability analysis of aerial cable towed systems. In Proceedings of the ASME Design Engineering Technical Conference, Quebec, QC, Canada, 26–29 August 2018; Volume 51807. [Google Scholar] [CrossRef] [Green Version]
- Petitti, A.; Sanalitro, D.; Tognon, M.; Milella, A.; Cortes, J.; Franchi, A. Inertial Estimation and Energy-Efficient Control of a Cable-suspended Load with a Team of UAVs. In Proceedings of the 2020 International Conference on Unmanned Aircraft Systems (ICUAS), Athens, Greece, 1–4 September 2020; pp. 158–165. [Google Scholar] [CrossRef]
- Guerrero-Sánchez, M.E.; Mercado-Ravell, D.A.; Lozano, R.; García-Beltrán, C.D. Swing-attenuation for a quadrotor transporting a cable-suspended payload. ISA Trans. 2017, 68, 433–449. [Google Scholar] [CrossRef] [PubMed]
- Cardona, G.; Tellez-Castro, D.; Mojica-Nava, E. Cooperative Transportation of a Cable-Suspended Load by Multiple Quadrotors. IFAC-PapersOnLine 2019, 52, 145–150. [Google Scholar] [CrossRef]
- Guerrero-Sánchez, M.; Lozano, R.; Castillo, P.; Hernández-González, O.; García-Beltrán, C.; Valencia-Palomo, G. Nonlinear control strategies for a UAV carrying a load with swing attenuation. Appl. Math. Model. 2021, 91, 709–722. [Google Scholar] [CrossRef]
- Erasmus, A.; Jordaan, H. Robust Adaptive Control of a Multirotor with an Unknown Suspended Payload. IFAC-PapersOnLine 2020, 53, 9432–9439. [Google Scholar] [CrossRef]
- Faust, A.; Palunko, I.; Cruz, P.; Fierro, R.; Tapia, L. Automated aerial suspended cargo delivery through reinforcement learning. Artif. Intell. 2017, 247, 381–398. [Google Scholar] [CrossRef] [Green Version]
- Pei, C.; Zhang, F.; Huang, P.; Yu, H. Trajectory planning for collaborative transportation by tethered multi-UAVs. In Proceedings of the 2021 IEEE International Conference on Real-Time Computing and Robotics (RCAR), Xining, China, 15–19 July 2021; pp. 769–775. [Google Scholar] [CrossRef]
- Kourani, A.; Daher, N. Marine locomotion: A tethered UAV-Buoy system with surge velocity control. Robot. Auton. Syst. 2021, 145, 103858. [Google Scholar] [CrossRef]
- Liu, Z. Modeling and control of quadrotor with tethered payload. In Proceedings of the 29th Chinese Control and Decision Conference (CCDC), Chongqing, China, 28–30 May 2017; pp. 5041–5045. [Google Scholar] [CrossRef]
- Viegas, C.; Chehreh, B.; Andrade, J.; Lourenço, J. Tethered UAV with Combined Multi-rotor and Water Jet Propulsion for Forest Fire Fighting. J. Intell. Robot. Syst. Theory Appl. 2022, 104, 21. [Google Scholar] [CrossRef]
- Lee, S.; Ng, W.; Liu, J.; Wong, S.; Srigrarom, S.; Foong, S. Flow-Induced Force Modeling and Active Compensation for a Fluid-Tethered Multirotor Aerial Craft during Pressurised Jetting. Drones 2022, 6, 88. [Google Scholar] [CrossRef]
- Kominami, T.; Paul, H.; Miyazaki, R.; Sumetheeprasit, B.; Ladig, R.; Shimonomura, K. Active tethered hook: Heavy load movement using hooks that move actively with micro UAVs and winch system. In Proceedings of the IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM), Delft, The Netherlands, 12–16 July 2021; pp. 264–269. [Google Scholar] [CrossRef]
- Pereira, P.; Roque, P.; Dimarogonas, D. Asymmetric Collaborative Bar Stabilization Tethered to Two Heterogeneous Aerial Vehicles. In Proceedings of the IEEE International Conference on Robotics and Automation, Brisbane, Australia, 21–25 May 2018; pp. 5247–5253. [Google Scholar] [CrossRef]
- Zhang, X.; Zhang, F.; Huang, P.; Gao, J.; Yu, H.; Pei, C.; Zhang, Y. Self-Triggered Based Coordinate Control with Low Communication for Tethered Multi-UAV Collaborative Transportation. IEEE Robot. Autom. Lett. 2021, 6, 1559–1566. [Google Scholar] [CrossRef]
- Qian, L.; Liu, H.H.T. Dynamics and Control of A Quadrotor with A Cable Suspended Payload. In Proceedings of the 2017 IEEE 30th Canadian Conference on Electrical and Computer Engineering (CCECE), Windsor, ON, Canada, 30 April–3 May 2017. [Google Scholar] [CrossRef]
- Villa, D.; Brandao, A.; Carelli, R.; Sarcinelli-Filho, M. Cooperative load transportation with two quadrotors using adaptive control. IEEE Access 2021, 9, 129148–129160. [Google Scholar] [CrossRef]
- Rastgoftar, H.; Atkins, E.M. Cooperative aerial lift and manipulation (CALM). Aerosp. Sci. Technol. 2018, 82–83, 105–118. [Google Scholar] [CrossRef]
- Liu, Y.; Zhang, F.; Huang, P.; Zhang, X. Analysis, planning and control for cooperative transportation of tethered multi-rotor UAVs. Aerosp. Sci. Technol. 2021, 113, 106673. [Google Scholar] [CrossRef]
- Bacelar, T.; Madeiras, J.; Melicio, R.; Cardeira, C.; Oliveira, P. On-board implementation and experimental validation of collaborative transportation of loads with multiple UAVs. Aerosp. Sci. Technol. 2020, 107, 106284. [Google Scholar] [CrossRef]
- Kotaru, P.; Sreenath, K. Multiple quadrotors carrying a flexible hose: Dynamics, differential flatness and control. IFAC-PapersOnLine 2020, 53, 8832–8839. [Google Scholar] [CrossRef]
- Sun, L.; Wang, K.; Mishamandani, A.H.A.; Zhao, G.; Huang, H.; Zhao, X.; Zhang, B. A novel tension-based controller design for the quadrotor–load system. Control Eng. Pract. 2021, 112, 104818. [Google Scholar] [CrossRef]
- Rastgoftar, H.; Taheri, E.; Ghasemi, A.H.; Atkins, E.M.; Girard, A. Continuum Deformation of a Multi-Quadcopter System in a Payload Delivery Mission. IFAC-PapersOnLine 2017, 50, 3455–3462. [Google Scholar] [CrossRef]
- Brandao, A.; Smrcka, D.; Pairet, E.; Nascimento, T. Side-Pull Maneuver: A Novel Control Strategy for Dragging a Cable-Tethered Load of Unknown Weight Using a UAV. IEEE Robot. Autom. Lett. 2022, 7, 9159–9166. [Google Scholar] [CrossRef]
- Panetsos, F.; Karras, G.C.; Kyriakopoulos, K.J. A Deep Reinforcement Learning Motion Control Strategy of a Multi-rotor UAV for Payload Transportation with Minimum Swing. In Proceedings of the 2022 30th Mediterranean Conference on Control and Automation (MED), Athens, Greece, 28 June–1 July 2022; pp. 368–374. [Google Scholar] [CrossRef]
- Jin, X.; Hu, Z. Adaptive Cooperative Load Transportation by a Team of Quadrotors With Multiple Constraint Requirements. IEEE Trans. Intell. Transp. Syst. 2022, 24, 801–814. [Google Scholar] [CrossRef]
- Lin, S.; Buzzatto, J.; Liang, J.; Liarokapis, M. An Adaptive, Reconfigurable, Tethered Aerial Grasping System for Reliable Caging and Transportation of Packages. In Proceedings of the 2022 IEEE International Symposium on Safety, Security, and Rescue Robotics (SSRR), Sevilla, Spain, 8–10 November 2022; pp. 7–13. [Google Scholar] [CrossRef]
- Liang, X.; Zhang, Z.; Yu, H.; Wang, Y.; Fang, Y.; Han, J. Antiswing Control for Aerial Transportation of the Suspended Cargo by Dual Quadrotor UAVs. IEEE/ASME Trans. Mechatron. 2022, 27, 5159–5172. [Google Scholar] [CrossRef]
- Jin, X.; Hu, Z. Constrained Load Transportation by A Team of Quadrotors. In Proceedings of the 2022 IEEE 61st Conference on Decision and Control (CDC), Cancun, Mexico, 6–9 December 2022; pp. 6580–6585. [Google Scholar] [CrossRef]
- Han, X.; Miyazaki, R.; Gao, T.; Tomita, K.; Kamimura, A. Controller Design and Disturbance Rejection of Multi-Quadcopters for Cable Suspended Payload Transportation Using Virtual Structure. IEEE Access 2022, 10, 122197–122210. [Google Scholar] [CrossRef]
- Vera-Amaro, R.; Burke, M.; Saad, W. Coordinated UAVs for Effective Payload Delivery. In Proceedings of the Globecom 2022-2022 IEEE Global Communications Conference, Rio de Janeiro, Brazil, 4–8 December 2022; pp. 3718–3723. [Google Scholar] [CrossRef]
- Zhang, X.; Yang, Q.; Yu, R.; Wu, D.; Wei, S.; Cui, J.; Fang, H. Design and Analysis of Truss Aerial Transportation System (TATS): The Lightweight Bar Spherical Joint Mechanism. In Proceedings of the 2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Kyoto, Japan, 23–27 October 2022; pp. 10501–10507. [Google Scholar] [CrossRef]
- Canlas, R.M.; Paradela, I.; Librado, L.; Ang, J.D.; Lagura, S.; Salaan, C.J. Design, development, and evaluation of passive-active payload release system for drone-assisted rescue operation. In Proceedings of the 2022 IEEE 14th International Conference on Humanoid, Nanotechnology, Information Technology, Communication and Control, Environment, and Management (HNICEM), Boracay Island, Philippines, 1–4 December 2022; pp. 1–6. [Google Scholar] [CrossRef]
- Ang, J.D.; Librado, L.; Salaan, C.J.; Maglasang, J.; Sanchez, K.; Ang, M. Drone with Pneumatic-tethered Suction-based Perching Mechanism for High Payload Application. In Proceedings of the 2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Kyoto, Japan, 23–27 October 2022; pp. 12154–12161. [Google Scholar] [CrossRef]
- Vilhelmsen, T.B.; Døssing, A. Drone-towed controlled-source electromagnetic (CSEM) system for near-surface geophysical prospecting: On instrument noise, temperature drift, transmission frequency, and survey set-up. Geosci. Instrum. Methods Data Syst. 2022, 11, 435–450. [Google Scholar] [CrossRef]
- Ramos, G.S.; Barreto Haddad, D.; Barros, A.L.; de Melo Honorio, L.; Faria Pinto, M. EKF-Based Vision-Assisted Target Tracking and Approaching for Autonomous UAV in Offshore Mooring Tasks. IEEE J. Miniaturization Air Space Syst. 2022, 3, 53–66. [Google Scholar] [CrossRef]
- Li, S.; Feng, L. Energy-Efficiency-Oriented Vision Feedback Control of QCSP Systems: Linear ADRC Approach. Front. Energy Res. 2022, 10, 865069. [Google Scholar] [CrossRef]
- Bulka, E.; He, C.; Wehbeh, J.; Sharf, I. Experiments on Collaborative Transport of Cable-suspended Payload with Quadrotor UAVs. In Proceedings of the 2022 International Conference on Unmanned Aircraft Systems (ICUAS), Dubrovnik, Croatia, 21–24 June 2022; pp. 1465–1473. [Google Scholar] [CrossRef]
- Goodman, J.; Colombo, L. Geometric Control of Two Quadrotors Carrying a Rigid Rod with Elastic Cables. J. Nonlinear Sci. 2022, 32, 65. [Google Scholar] [CrossRef]
- Liu, Y.; Wang, H.; Liu, B.; Chen, L.; Wang, Y.; Chen, H. Learning-Based Compound Docking Control for UAV Aerial Recovery: Methodology and Implementation. IEEE/ASME Trans. Mechatron. 2022, 28, 1706–1717. [Google Scholar] [CrossRef]
- Xiong, H.; Huang, J.; Zeng, W.; Cao, H.; Lu, W. Load Estimation and Optimal Energy Efficiency Configuration Determination of an Aerial Cable Towed Robot: A Preliminary Study. In Proceedings of the 2022 International Conference on Machine Learning, Control, and Robotics (MLCR), Suzhou, China, 29–31 October 2022; pp. 143–147. [Google Scholar] [CrossRef]
- Umakarthikeyan, S.; Narayanan, R.B. Modelling and Simulation of Quadrotor-based Cable-Driven Parallel Manipulator. In Proceedings of the 2022 6th International Conference on Electronics, Communication and Aerospace Technology, Coimbatore, India, 1–3 December 2022; pp. 151–157. [Google Scholar] [CrossRef]
- Fontanes, P.; Montanyà, J.; Arcanjo, M.; Urbani, M.; Asensio, C.; Guerra-Garcia, C. On the Induced Currents to Wind Turbines by the Earth’s Atmospheric Electric Potential: Experiments With Drones. IEEE Access 2022, 10, 21277–21290. [Google Scholar] [CrossRef]
- Akhtar, A.; Saleem, S.; Shan, J. Path Invariant Controllers for a Quadrotor With a Cable-Suspended Payload Using a Global Parameterization. IEEE Trans. Control Syst. Technol. 2022, 30, 2002–2017. [Google Scholar] [CrossRef]
- Panetsos, F.; Karras, G.C.; Aspragkathos, S.N.; Kyriakopoulos, K.J. Precise Position Control of a Multi-rotor UAV with a Cable-suspended Mechanism During Water Sampling. In Proceedings of the 2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Kyoto, Japan, 23–27 October 2022; pp. 1780–1786. [Google Scholar] [CrossRef]
- Schiano, F.; Kornatowski, P.M.; Cencetti, L.; Floreano, D. Reconfigurable Drone System for Transportation of Parcels With Variable Mass and Size. IEEE Robot. Autom. Lett. 2022, 7, 12150–12157. [Google Scholar] [CrossRef]
- Koutalakis, P.; Zaimes, G.N. River Flow Measurements Utilizing UAV-Based Surface Velocimetry and Bathymetry Coupled with Sonar. Hydrology 2022, 9, 148. [Google Scholar] [CrossRef]
- Herrmann, L.; Boumann, R.; Lehmann, M.; Mueller, S.; Bruckmann, T. Simulation-Based Comparison of Novel Automated Construction Systems. Robotics 2022, 11, 119. [Google Scholar] [CrossRef]
- Diaz, A.L.; Ortega, A.E.; Tingle, H.; Pulido, A.; Cordero, O.; Nelson, M.; Cocoves, N.E.; Shin, J.; Carthy, R.R.; Wilkinson, B.E.; et al. The Bathy-Drone: An Autonomous Uncrewed Drone-Tethered Sonar System. Drones 2022, 6, 294. [Google Scholar] [CrossRef]
- Melgarejo, J.; Furukawa, R. Unmanned aerial vehicle design for pressure washing building facades in Lima Metropolitan Area using hydrogen fuel cell. In Proceedings of the 2022 IEEE XXIX International Conference on Electronics, Electrical Engineering and Computing (INTERCON), Lima, Peru, 11–13 August 2022; pp. 1–4. [Google Scholar] [CrossRef]
- Sugaya, T.; Murakami, T. Velocity and Attitude Control of Quadcopter with Suspended-payload using Disturbance Observer with Payload Inclination Suppression. In Proceedings of the 2022 IEEE 17th International Conference on Advanced Motion Control (AMC), Padova, Italy, 18–20 February 2022; pp. 414–419. [Google Scholar] [CrossRef]
- Wang, S.; Liu, J.; Jiang, X.; Chen, H. Vision-Inertial-based Adaptive State Estimation of Hexacopter with a Cable-Suspended Load. In Proceedings of the 2022 IEEE International Conference on Real-Time Computing and Robotics (RCAR), Guiyang, China, 17–22 July 2022; pp. 168–173. [Google Scholar] [CrossRef]
- Suzuki, M.; Yokota, S.; Matsumoto, A.; Hashimoto, H.; Chugo, D. Position estimation of the drone based on the tensile force of cooperatively towed tube-In case of cooperative towing by two hovering two drones. In Proceedings of the 44th Annual Conference of the IEEE Industrial Electronics Society (IECON), Washington, DC, USA, 21–23 October 2018; pp. 4294–4299. [Google Scholar] [CrossRef]
- Jamshidifar, H.; Khajepour, A. Static Workspace Optimization of Aerial Cable Towed Robots With Land-Fixed Winches. IEEE Trans. Robot. 2020, 36, 1603–1610. [Google Scholar] [CrossRef]
- Abiko, S.; Kuno, A.; Narasaki, S.; Oosedo, A.; Kokubun, S.; Uchiyama, M. Obstacle Avoidance Flight and Shape Estimation Using Catenary Curve for Manipulation of a Cable Hanged by Aerial Robots. In Proceedings of the 2017 IEEE International Conference on Robotics and Biomimetics, Macau, China, 5–8 December 2017; pp. 2099–2104. [Google Scholar] [CrossRef]
- Nicotra, M.M.; Naldi, R.; Garone, E. Nonlinear control of a tethered UAV: The taut cable case. Automatica 2017, 78, 174–184. [Google Scholar] [CrossRef] [Green Version]
- Bolognini, M.; Fagiano, L. LiDAR-Based Navigation of Tethered Drone Formations in an Unknown Environment. IFAC-PapersOnLine 2020, 53, 9426–9431. [Google Scholar] [CrossRef]
- Xiao, X.; Dufek, J.; Murphy, R. Benchmarking Tether-based UAV Motion Primitives. In Proceedings of the 2019 IEEE International Symposium on Safety, Security, and Rescue Robotics (SSRR), Wurzburg, Germany, 2–4 September 2019; pp. 50–55. [Google Scholar] [CrossRef] [Green Version]
- Martínez-Rozas, S.; Alejo, D.; Caballero, F.; Merino, L. Optimization-based Trajectory Planning for Tethered Aerial Robots. In Proceedings of the IEEE International Conference on Robotics and Automation, Xi’an, China, 30 May–5 June 2021; pp. 362–368. [Google Scholar] [CrossRef]
- Rossi, E.; Bruschetta, M.; Carli, R.; Chen, Y.; Farina, M. Online Nonlinear Model Predictive Control for tethered UAVs to perform a safe and constrained maneuver. In Proceedings of the 2019 18th European Control Conference (ECC), Naples, Italy, 25–28 June 2019; pp. 3996–4001. [Google Scholar] [CrossRef]
- Al-Radaidehl, A.; Sun, L. Observability analysis and Bayesian filtering for self-localization of a tethered multicopter in GPS-denied environments. In Proceedings of the 2019 International Conference on Unmanned Aircraft Systems (ICUAS), Atlanta, GA, USA, 11–14 June 2019; pp. 1041–1047. [Google Scholar] [CrossRef]
- Tognon, M.; Franchi, A. Dynamics, control, and estimation for aerial robots tethered by cables or bars. IEEE Trans. Robot. 2017, 33, 834–845. [Google Scholar] [CrossRef] [Green Version]
- Kiribayashi, S.; Yakushigawa, K.; Nagatani, K. Position estimation of tethered micro unmanned aerial vehicle by observing the slack tether. In Proceedings of the 15th IEEE International Symposium on Safety, Security and Rescue Robotics, Conference (SSRR), Shanghai, China, 11–13 October 2017; pp. 159–165. [Google Scholar] [CrossRef]
- Miki, T.; Khrapchenkov, P.; Hori, K. UAV/UGV autonomous cooperation: UAV assists UGV to climb a cliff by attaching a tether. In Proceedings of the 2019 International Conference on Robotics and Automation (ICRA), Montreal, QC, Canada, 20–24 May 2019; pp. 8041–8047. [Google Scholar] [CrossRef] [Green Version]
- Licitra, G.; Bürger, A.; Williams, P.; Ruiterkamp, R.; Diehl, M. Aerodynamic model identification of an autonomous aircraft for airborne wind energy. Optim. Control Appl. Methods 2019, 40, 422–447. [Google Scholar] [CrossRef]
- Kumar, R.; Agarwal, S.R.; Kumar, M. Modeling and Control of a Tethered Tilt-Rotor Quadcopter with Atmospheric Wind Model. IFAC-PapersOnLine 2021, 54, 463–468. [Google Scholar] [CrossRef]
- Talke, K.; de Oliveira, M.; Bewley, T. Catenary tether shape analysis for a UAV-USV team. In Proceedings of the 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, 1–5 October 2018; pp. 7803–7809. [Google Scholar] [CrossRef]
- Al-Radaideh, A.; Sun, L. Self-localization of tethered drones without a cable force sensor in GPS-denied environments. Drones 2021, 5, 135. [Google Scholar] [CrossRef]
- Kourani, A.; Daher, N. A Tethered Quadrotor UAV-Buoy System for Marine Locomotion. In Proceedings of the IEEE International Conference on Robotics and Automation, Xi’an, China, 30 May–5 June 2021; pp. 59–65. [Google Scholar] [CrossRef]
- Xiao, X.; Dufek, J.; Suhail, M.; Murphy, R. Motion Planning for a UAV with a Straight or Kinked Tether. In Proceedings of the IEEE International Conference on Intelligent Robots and Systems, Madrid, Spain, 1–5 October 2018; pp. 8486–8492. [Google Scholar] [CrossRef] [Green Version]
- Fagiano, L.; Nguyen-Van, E.; Rager, F.; Schnez, S.; Ohler, C. Automatic Take-Off of a Tethered Aircraft for Airborne Wind Energy: Control Design and Experimental Results. IFAC-PapersOnLine 2017, 50, 11932–11937. [Google Scholar] [CrossRef]
- Grishin, I.; Vishnevsky, V.; Dinh, T.D.; Vybornova, A.; Kirichek, R. Methods for correcting positions of tethered UAVs in adverse weather conditions. In Proceedings of the 2020 12th International Congress on Ultra Modern Telecommunications and Control Systems and Workshops (ICUMT), Brno, Czech Republic, 5–7 October 2020; pp. 308–312. [Google Scholar] [CrossRef]
- Fagiano, L.; Nguyen-Van, E.; Rager, F.; Schnez, S.; Ohler, C. Autonomous Takeoff and Flight of a Tethered Aircraft for Airborne Wind Energy. IEEE Trans. Control Syst. Technol. 2018, 26, 151–166. [Google Scholar] [CrossRef] [Green Version]
- Howard, G.D.; Elfes, A. A Staged Approach to Evolving Real-world UAV Controllers. Evol. Intell. 2019, 12, 491–502. [Google Scholar] [CrossRef] [Green Version]
- Chien, J.; Clarissa, L.; Liu, J.; Low, J.; Foong, S. Kinematic model predictive control for a novel tethered aerial cable-driven continuum robot. In Proceedings of the IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Delft, The Netherlands, 12–16 July 2021; pp. 1348–1354. [Google Scholar] [CrossRef]
- Dicembrini, E.; Scanavino, M.; Dabbene, F.; Guglieri, G. Modelling and simulation of a tethered UAS. In Proceedings of the 2020 International Conference on Unmanned Aircraft Systems (ICUAS), Athens, Greece, 1–4 September 2020; pp. 1801–1808. [Google Scholar] [CrossRef]
- Dufek, J.; Xiao, X.; Murphy, R. Visual pose stabilization of tethered small unmanned aerial system to assist drowning victim recovery. In Proceedings of the 2017 IEEE International Symposium on Safety, Security and Rescue Robotics (SSRR), Shanghai, China, 11–13 October 2017; pp. 116–122. [Google Scholar] [CrossRef]
- Todeschini, D.; Fagiano, L.; Micheli, C.; Cattano, A. Control of vertical take off, dynamic flight and landing of hybrid drones for airborne wind energy systems. In Proceedings of the 2019 American Control Conference (ACC), Philadelphia, PA, USA, 10–12 July 2019; pp. 2177–2182. [Google Scholar] [CrossRef]
- Tian, B.; Bhattacharya, S. Modelling and control of a spatial dynamic cable. Acta Mech. Sin. 2019, 35, 866–878. [Google Scholar] [CrossRef]
- Tognon, M.; Franchi, A. Position Tracking Control for an Aerial Robot Passively Tethered to an Independently Moving Platform. IFAC-PapersOnLine 2017, 50, 1069–1074. [Google Scholar] [CrossRef]
- Polzin, M.; Wood, T.A.; Hesse, H.; Smith, R.S. State Estimation for Kite Power Systems with Delayed Sensor Measurements. IFAC-PapersOnLine 2017, 50, 11959–11964. [Google Scholar] [CrossRef]
- He, W.; Zhang, S. Stability Parameter Range of a Tethered Unmanned Aerial Vehicle. Shock Vib. 2022, 2022, 1–13. [Google Scholar] [CrossRef]
- Schuchardt, B.; Dautermann, T.; Donkels, A.; Krause, S.; Peinecke, N.; Schwoch, G. Maritime operation of an unmanned rotorcraft with tethered ship deck landing system. CEAS Aeronaut. J. 2021, 12, 3–11. [Google Scholar] [CrossRef]
- Kosarnovsky, B.; Arogeti, S. Geometric and constrained control for a string of tethered drones. Robot. Auton. Syst. 2020, 133, 103609. [Google Scholar] [CrossRef]
- Vishnevsky, V.; Mikhailov, E.; Tumchenok, D.; Shirvanyan, A. Mathematical Model of the Operation of a Tethered Unmanned Platform under Wind Loading. Math. Model. Comput. Simulat. 2020, 12, 492–502. [Google Scholar] [CrossRef]
- Takeuchi, R.; Watanabe, K.; Nagai, I. Control of a tethered Quadrotor using a quaternion feedback. In Proceedings of the IOP Conference Series: Materials Science and Engineering, Kazimierz Dolny, Poland, 21–23 November 2019; Volume 619. [Google Scholar] [CrossRef]
- Xiao, X.; Fan, Y.; Dufek, J.; Murphy, R. Indoor UAV Localization Using a Tether. In Proceedings of the 2018 IEEE International Symposium on Safety, Security, and Rescue Robotics (SSRR), Philadelphia, PA, USA, 6–8 August 2018. [Google Scholar] [CrossRef]
- Glick, T.; Arogeti, S. Control of Tethered Drones with state and input Constraints-a Unified Model Approach. In Proceedings of the 2018 International Conference on Unmanned Aircraft Systems (ICUAS), Dallas, TX, USA, 12–15 June 2018; pp. 995–1002. [Google Scholar] [CrossRef]
- Al-Radaideh, A.; Sun, L. Self-localization of a tethered quadcopter using inertial sensors in a GPS-denied environment. In Proceedings of the 2017 International Conference on Unmanned Aircraft Systems (ICUAS), Miami, FL, USA, 13–16 June 2017; pp. 271–277. [Google Scholar] [CrossRef]
- Fagiano, L. Systems of Tethered Multicopters: Modeling and Control Design. IFAC-PapersOnLine 2017, 50, 4610–4615. [Google Scholar] [CrossRef]
- Mfiri, J.; Treurnicht, J.; Engelbrecht, J. Automated landing of a tethered quad-rotor UAV with constant winching force. In Proceedings of the 2016 Pattern Recognition Association of South Africa and Robotics and Mechatronics International Conference (PRASA-RobMech), Stellenbosch, South Africa, 30 November–2 December 2016. [Google Scholar] [CrossRef]
- Omandam, R.S.; Paradela, I.P.; Banglos, C.A.G.; Librado, L.G.; Mae Canlas, R.; Salaan, C.J.O. 3D Localization of Suspended and Tethered Drone for High-rise Bridge Inspection. In Proceedings of the 2022 IEEE 14th International Conference on Humanoid, Nanotechnology, Information Technology, Communication and Control, Environment, and Management (HNICEM), Boracay Island, Philippines, 1–4 December 2022; pp. 1–6. [Google Scholar] [CrossRef]
- Wang, J.; Zhao, L.; Xia, K. A Discrete-time Intercepting Strategy for Net Capture Using Multiple Unmanned Aerial Vehicles. In Proceedings of the 2022 IEEE International Conference on Unmanned Systems (ICUS), Guangzhou, China, 28–30 October 2022; pp. 430–435. [Google Scholar] [CrossRef]
- Bolognini, M.; Saccani, D.; Cirillo, F.; Fagiano, L. Autonomous navigation of interconnected tethered drones in a partially known environment with obstacles. In Proceedings of the 2022 IEEE 61st Conference on Decision and Control (CDC), Cancun, Mexico, 6–9 December 2022; pp. 3315–3320. [Google Scholar] [CrossRef]
- Ye, T.; Xu, X.; Dai, J. Dangerous Area of Tethered UAV Due to Impact. IEEE Access 2022, 10, 121152–121158. [Google Scholar] [CrossRef]
- Abantas, A.H.C.; Sabellona, W.A.; Salaan, C.J.O. Design of a Rule-Based Tuned PID Controller for Tether Management of a Suspended Tethered UAV. In Proceedings of the 2022 IEEE 14th International Conference on Humanoid, Nanotechnology, Information Technology, Communication and Control, Environment, and Management (HNICEM), Boracay Island, Philippines, 1–4 December 2022; pp. 1–6. [Google Scholar] [CrossRef]
- Ramos, G.; Pinto, M.; Coelho, F.; Honorio, L.; Haddad, D. Hybrid methodology based on computational vision and sensor fusion for assisting autonomous UAV on offshore messenger cable transfer operation. Robotica 2022, 40, 2786–2814. [Google Scholar] [CrossRef]
- Estevez, J.; Lopez-guede, J.; Garate, G.; Grana, M. Hybrid Modeling of Deformable Linear Objects for Their Cooperative Transportation by Teams of Quadrotors. Appl. Sci. 2022, 12, 5253. [Google Scholar] [CrossRef]
- Vishnevsky, V.M.; Vytovtov, K.A.; Barabanova, E.A.; Frolov, S.A.; Buzdin, V.E.; Kalmykov, N.S. Modelling of UAV Simulator for Local Navigation System of Tethered High-Altitude Platforms. In Proceedings of the 2022 International Conference on Information, Control, and Communication Technologies (ICCT), Nanjing, China, 11–14 November 2022; pp. 1–4. [Google Scholar] [CrossRef]
- Farinha, A.T.; di Tria, J.; Reyes, M.; Rosas, C.; Pang, O.; Zufferey, R.; Pomati, F.; Kovac, M. Off-shore and underwater sampling of aquatic environments with the aerial-aquatic drone MEDUSA. Front. Environ. Sci. 2022, 10, 2305. [Google Scholar] [CrossRef]
- Mohammadi, K.; Sirouspour, S.; Grivani, A. Passivity-Based Control of Multiple Quadrotors Carrying a Cable-Suspended Payload. IEEE/ASME Trans. Mechatron. 2022, 27, 2390–2400. [Google Scholar] [CrossRef]
- Yang, L.; Du, G.X.; Gao, Y.; Quan, Q. Position Control of Tethered UAV with Onboard Inertial Sensors. In Proceedings of the 2022 41st Chinese Control Conference (CCC), Hefei, China, 25–27 July 2022; pp. 2870–2875. [Google Scholar] [CrossRef]
- Vicoy, L.; Aldueso, K.M.; Salaan, C.J. Proposal and Experimental Validation of Suspended and Power-Tethered Drone (SPTD) for Inspection of High Bridges. Eng. Lett. 2022, 30, 1025–1033. [Google Scholar]
- Oh, D.D.; Byun, J.; Lee, D. Real-Time Trajectory Generation of a Quadrotor UAV with Load Suspended from a Pulley. In Proceedings of the 2022 22nd International Conference on Control, Automation and Systems (ICCAS), Busan, Republic of Korea, 27 November–1 December 2022; pp. 1309–1314. [Google Scholar] [CrossRef]
- Valerio, C.G.; Aguillón, N.; Espinoza, E.S.; Lozano, R. Reference Generator for a System of Multiple Tethered Unmanned Aerial Vehicles. Drones 2022, 6, 390. [Google Scholar] [CrossRef]
- Liu, L.; Jiang, Z.; Wang, F.; Zou, D.; Wang, Z.; Yang, J. Research on UAV’s Automatic Hang Method For Auxiliary High-voltage Transmission Line Device. J. Phys. Conf. Ser. 2022, 2260, 012005. [Google Scholar] [CrossRef]
- Alakhras, A.; Sattar, I.; Alvi, M.; Qanbar, M.; Jaradat, M.; Alkaddour, M. The Design of a Lightweight Cable Aerial Manipulator with a CoG Compensation Mechanism for Construction Inspection Purposes. Appl. Sci. 2022, 12, 1173. [Google Scholar] [CrossRef]
- Li, X.B.; Wang, D.; Lu, Q.C.; Peng, Z.R.; Fu, Q.; Hu, X.M.; Huo, J.; Xiu, G.; Li, B.; Li, C.; et al. Three-dimensional analysis of ozone and PM2.5 distributions obtained by observations of tethered balloon and unmanned aerial vehicle in Shanghai, China. Stoch. Environ. Res. Risk Assess. 2018, 32, 1189–1203. [Google Scholar] [CrossRef]
- Li, X.B.; Peng, Z.R.; Lu, Q.C.; Wang, D.; Hu, X.M.; Wang, D.; Li, B.; Fu, Q.; Xiu, G.; He, H. Evaluation of unmanned aerial system in measuring lower tropospheric ozone and fine aerosol particles using portable monitors. Atmos. Environ. 2020, 222, 117134. [Google Scholar] [CrossRef]
- Byerlay, R.A.E.; Nambiar, M.K.; Nazem, A.; Nahian, M.R.; Biglarbegian, M.; Aliabadi, A.A. Measurement of land surface temperature from oblique angle airborne thermal camera observations. Int. J. Remote Sens. 2020, 41, 3119–3146. [Google Scholar] [CrossRef]
- Zhang, D.; Luo, H.; Cui, Y.; Zeng, X.; Wang, S. Tandem, long-duration, ultra-high-altitude tethered balloon and its system characteristics. Adv. Space Res. 2020, 66, 2446–2465. [Google Scholar] [CrossRef]
- Qi, X.; Ding, A.; Nie, W.; Chi, X.; Huang, X.; Xu, Z.; Wang, T.; Wang, Z.; Wang, J.; Sun, P.; et al. Direct measurement of new particle formation based on tethered airship around the top of the planetary boundary layer in eastern China. Atmos. Environ. 2019, 209, 92–101. [Google Scholar] [CrossRef]
- Zhang, K.; Wang, D.; Bian, Q.; Duan, Y.; Zhao, M.; Fei, D.; Xiu, G.; Fu, Q. Tethered balloon-based particle number concentration, and size distribution vertical profiles within the lower troposphere of Shanghai. Atmos. Environ. 2017, 154, 141–150. [Google Scholar] [CrossRef]
- Wang, D.; Huo, J.; Duan, Y.; Zhang, K.; Ding, A.; Fu, Q.; Luo, J.; Fei, D.; Xiu, G.; Huang, K. Vertical distribution and transport of air pollutants during a regional haze event in eastern China: A tethered mega-balloon observation study. Atmos. Environ. 2021, 246, 118039. [Google Scholar] [CrossRef]
- Ferrero, L.; Ritter, C.; Cappelletti, D.; Moroni, B.; Močnik, G.; Mazzola, M.; Lupi, A.; Becagli, S.; Traversi, R.; Cataldi, M.; et al. Aerosol optical properties in the Arctic: The role of aerosol chemistry and dust composition in a closure experiment between LiDAR and tethered balloon vertical profiles. Sci. Total Environ. 2019, 686, 452–467. [Google Scholar] [CrossRef] [Green Version]
- Rico, D.; Munoz-Arriola, F.; Detweiler, C. Trajectory Selection for Power-over-Tether Atmospheric Sensing UAS. In Proceedings of the IEEE International Conference on Intelligent Robots and Systems, Prague, Czech Republic, 27 September–1 October 2021; pp. 2321–2328. [Google Scholar] [CrossRef]
- Carrozzo, M.; De Vito, S.; Esposito, E.; Formisano, F.; Salvato, M.; Massera, E.; Di Francia, G.; Delli Veneri, P.; Iadaresta, M.; Mennella, A. An UAV mounted intelligent monitoring system for impromptu air quality assessments. Lect. Notes Electr. Eng. 2019, 539, 497–506. [Google Scholar] [CrossRef]
- Korolkov, V.; Pustovalov, K.; Tikhomirov, A.; Telminov, A.; Kurakov, S. Autonomous weather stations for unmanned aerial vehicles. Preliminary results of measurements of meteorological profiles. In Proceedings of the IOP Conference Series: Earth and Environmental Science, Banda Aceh, Indonesia, 26–27 September 2018; Volume 211. [Google Scholar] [CrossRef]
- Bafandeh, A.; Bin-Karim, S.; Baheri, A.; Vermillion, C. A comparative assessment of hierarchical control structures for spatiotemporally-varying systems, with application to airborne wind energy. Control Eng. Pract. 2018, 74, 71–83. [Google Scholar] [CrossRef]
- Todeschini, D.; Fagiano, L.; Micheli, C.; Cattano, A. Control of a rigid wing pumping Airborne Wind Energy system in all operational phases. Control Eng. Pract. 2021, 111, 104794. [Google Scholar] [CrossRef]
- Licitra, G.; Williams, P.; Gillis, J.; Ghandchi, S.; Sieberling, S.; Ruiterkamp, R.; Diehl, M. Aerodynamic Parameter Identification for an Airborne Wind Energy Pumping System. IFAC-PapersOnLine 2017, 50, 11951–11958. [Google Scholar] [CrossRef]
- Eijkelhof, D.; Schmehl, R. Six-degrees-of-freedom simulation model for future multi-megawatt airborne wind energy systems. Renew. Energy 2022, 196, 137–150. [Google Scholar] [CrossRef]
- Licitra, G.; Koenemann, J.; Bürger, A.; Williams, P.; Ruiterkamp, R.; Diehl, M. Performance assessment of a rigid wing Airborne Wind Energy pumping system. Energy 2019, 173, 569–585. [Google Scholar] [CrossRef]
- Piancastelli, L.; Cassani, S. Energy transfer from airborne high altitude wind turbines: Part III. performance evaluation of a small, mass-produced, fixed wing generator. ARPN J. Eng. Appl. Sci. 2020, 15, 1355–1365. [Google Scholar]
- Rapp, S.; Schmehl, R.; Oland, E.; Haas, T. Cascaded pumping cycle control for rigid wing airborne wind energy systems. J. Guid. Control. Dyn. 2019, 42, 2456–2473. [Google Scholar] [CrossRef]
- Rapp, S.; Schmehl, R.; Oland, E.; Smidt, S.; Haas, T.; Meyers, J. A modular control architecture for airborne wind energy systems. In Proceedings of the AIAA Scitech 2019 Forum, San Diego, CA, USA, 6–10 January 2019. [Google Scholar] [CrossRef] [Green Version]
- Montanya, J.; Lopez, J.; Fontanes, P.; Urbani, M.; Van Der Velde, O.; Romero, D. Using tethered drones to investigate ESD in wind turbine blades during fair and thunderstorm weather. In Proceedings of the 34th International Conference on Lightning Protection (ICLP), Rzeszow, Poland, 2–7 September 2018. [Google Scholar] [CrossRef]
- Jiang, Y. Modeling and Simulation of a New Tethered Wind Power System. In Proceedings of the 2nd International Conference on Green Energy and Applications (ICGEA), Singapore, 24–26 March 2018; pp. 183–187. [Google Scholar] [CrossRef]
- Fagiano, L.; Quack, M.; Bauer, F.; Carnel, L.; Oland, E. Autonomous Airborne Wind Energy Systems: Accomplishments and Challenges. Annu. Rev. Control. Robot. Auton. Syst. 2022, 5, 603–631. [Google Scholar] [CrossRef]
- Müller, J.A.; Elhashash, M.Y.M.K.; Gollnick, V. Electrical Launch Catapult and Landing Decelerator for Fixed-Wing Airborne Wind Energy Systems. Energies 2022, 15, 2502. [Google Scholar] [CrossRef]
- Azaki, Z.; Dumon, J.; Meslem, N.; Hably, A.; Susbielle, P. Modelling and control of a tethered drone for an AWE application. In Proceedings of the 2022 International Conference on Control, Automation and Diagnosis (ICCAD), Lisbon, Portugal, 13–15 July 2022; pp. 1–6. [Google Scholar] [CrossRef]
- Saif, A.; Dimyati, K.; Noordin, K.; Shah, N.; Alsamhi, S.; Abdullah, Q. Energy-efficient tethered UAV deployment in B5G for smart environments and disaster recovery. In Proceedings of the 2021 1st International Conference on Emerging Smart Technologies and Applications (eSmarTA), Sana’a, Yemen, 10–12 August 2021. [Google Scholar] [CrossRef]
- Safwat, N.E.D.; Hafez, I.M.; Newagy, F. 3D Placement of a New Tethered UAV to UAV Relay System for Coverage Maximization. Electronics 2022, 11, 385. [Google Scholar] [CrossRef]
- Bushnaq, O.; Kishk, M.; Celik, A.; Alouini, M.S.; Al-Naffouri, T. Optimal Deployment of Tethered Drones for Maximum Cellular Coverage in User Clusters. IEEE Trans. Wirel. Commun. 2021, 20, 2092–2108. [Google Scholar] [CrossRef]
- Vishnevsky, V.; Meshcheryakov, R. Experience of developing a multifunctional tethered high-altitude unmanned platform of long-term operation. Lect. Notes Comput. Sci. 2019, 11659, 236–244. [Google Scholar] [CrossRef]
- Yuan, F.; Xin, D. Research and design of tethered multi-rotor unmanned airborne system. In Proceedings of the IEEE 5th Information Technology and Mechatronics Engineering Conference (ITOEC), Chongqing, China, 12–14 June 2020; pp. 79–82. [Google Scholar] [CrossRef]
- Lally, M.; Chamieh, M.; Daruwala, R.; Duong, V.; Hall, H.; Holt, S.; Nguyen, L.; Rafizadeh, R.; Fah, P.; Weng, K.; et al. Tethered Balloon-Based Experiment of Surface Water Height Using Satellite Signals of Opportunity. In Proceedings of the IEEE Aerospace Conference Proceedings, Big Sky, MT, USA, 7–14 March 2020. [Google Scholar] [CrossRef]
- Liu, L. A Downlink Coverage Scheme of Tethered UAV. In Proceedings of the 2020 International Wireless Communications and Mobile Computing (IWCMC), Limassol, Cyprus, 15–19 June 2020; pp. 685–691. [Google Scholar] [CrossRef]
- Chechin, G.V.; Kolesnichenko, V.E.; Selin, A.I. Use of unmanned aerial systems for communication and air mobility in Arctic region. Adv. Aircr. Spacecr. Sci. 2022, 9, 525–536. [Google Scholar] [CrossRef]
- Mauermayer, R.A.M.; Kornprobst, J. A Cost-Effective Tethered-UAV-Based Coherent Near-Field Antenna Measurement System. IEEE Open J. Antennas Propag. 2022, 3, 984–1002. [Google Scholar] [CrossRef]
- Kondo, S.; Ota, K.; Takeshita, E.; Yoshimoto, N.; Nakayama, Y. Autonomous Tethered Drone Cell for IoT Connectivity in 6G Communications. In Proceedings of the 2022 IEEE 95th Vehicular Technology Conference: (VTC2022-Spring), Helsinki, Finland, 19–22 June 2022; pp. 1–6. [Google Scholar] [CrossRef]
- Zhang, X.; Peng, M.; Liu, C. Impacts of Antenna Downtilt and Backhaul Connectivity on the UAV-Enabled Heterogeneous Networks. IEEE Trans. Wirel. Commun. 2022, 22, 4057–4073. [Google Scholar] [CrossRef]
- Yingst, A.; Marojevic, V. Tethered UAV with high gain antenna for BVLOS CNPC: A practical design for widespread use. In Proceedings of the 2021 IEEE 22nd International Symposium on a World of Wireless, Mobile and Multimedia Networks (WoWMoM), Pisa, Italy, 7–11 June 2021; pp. 323–328. [Google Scholar] [CrossRef]
- Jung, S.; Jo, Y.; Kim, Y.J. Aerial Surveillance with Low-Altitude Long-Endurance Tethered Multirotor UAVs Using Photovoltaic Power Management System. Energies 2019, 12, 1323. [Google Scholar] [CrossRef] [Green Version]
- Walendziuk, W.; Słowik, M.; Gulewicz, M. Implementation of an unmanned aerial observation platform powered by a ground station module. IFAC-PapersOnLine 2022, 55, 340–344. [Google Scholar] [CrossRef]
- Wiangtong, T.; Pookaiyaudom, P.; Sirisuk, P. Exploitation of IoTs for PMU in Tethered Drone. In Proceedings of the 7th International Conference on Engineering, Applied Sciences and Technology (ICEAST), Pattaya, Thailand, 1–3 April 2021; pp. 5–8. [Google Scholar] [CrossRef]
- Rico, D.; Detweiler, C.; Muñoz-Arriola, F. Power-over-tether UAS leveraged for nearly-indefinite meteorological data acquisition. In Proceedings of the ASABE 2020 Annual International Meeting, Virtual, 13–15 July 2020. [Google Scholar] [CrossRef]
- Xie, Z.; Song, X.; Cao, J.; Qiu, W. Providing Aerial MEC Service in Areas Without Infrastructure: A Tethered-UAV-Based Energy-Efficient Task Scheduling Framework. IEEE Internet Things J. 2022, 9, 25223–25236. [Google Scholar] [CrossRef]
- Stewart, W.; Floreano, D.; Ebeid, E. A Lightweight Device for Energy Harvesting from Power Lines with a Fixed-Wing UAV. In Proceedings of the 2022 International Conference on Unmanned Aircraft Systems (ICUAS), Dubrovnik, Croatia, 21–24 June 2022; pp. 86–93. [Google Scholar] [CrossRef]
- Lahmeri, M.A.; Kishk, M.A.; Alouini, M.S. Charging Techniques for UAV-Assisted Data Collection: Is Laser Power Beaming the Answer? IEEE Commun. Mag. 2022, 60, 50–56. [Google Scholar] [CrossRef]
- Wang, H.F.; Zhai, L.; Huang, H.; Guan, L.M.; Mu, K.N.; Wang, G.P. Measurement for cracks at the bottom of bridges based on tethered creeping unmanned aerial vehicle. Autom. Constr. 2020, 119, 103330. [Google Scholar] [CrossRef]
- Xiao, X.; Dufek, J.; Murphy, R. Visual servoing for teleoperation using a tethered UAV. In Proceedings of the 15th IEEE International Symposium on Safety, Security and Rescue Robotics, Conference (SSRR), Shanghai, China, 11–13 October 2017; pp. 147–152. [Google Scholar] [CrossRef]
- Liang, X.; Zhao, S.; Chen, G.; Tong, G.; Jiang, L.; Zhang, W. Design and Development of Ground Control System for Tethered UAV. In Proceedings of the 2019 IEEE International Conference on Unmanned Systems (ICUS), Beijing, China, 17–19 October 2019; pp. 291–296. [Google Scholar] [CrossRef]
- Watanabe, K.; Moritoki, N.; Nagai, I. Attitude control of a camera mounted-type tethered quadrotor for infrastructure inspection. In Proceedings of the 43rd Annual Conference of the IEEE Industrial Electronics Society (IECON), Beijing, China, 29 October–1 November 2017; pp. 6252–6257. [Google Scholar] [CrossRef]
- Steinhausler, F.; Georgiou, H.V. Detection of victims with UAVs during wide area Search and Rescue operations. In Proceedings of the SSRR 2022-IEEE International Symposium on Safety, Security, and Rescue Robotics, Sevilla, Spain, 8–10 November 2022; pp. 14–19. [Google Scholar] [CrossRef]
- Kampf, R.; Kubina, M.; Bartuska, L.; Soviar, J. Use of Unmanned Aerial Vehicles for Traffic Surveys. Logi-Sci. J. Transp. Logist. 2022, 13, 163–173. [Google Scholar] [CrossRef]
- Wang, Q.; Shen, L.; Zhao, S.; Wang, X. Air-recovery method of Unmanned Aerial Vehicles Swarm with Lower Speed Based on Backstepping. In Proceedings of the 2020 Chinese Automation Congress (CAC), Shanghai, China, 6–8 November 2020; pp. 1715–1720. [Google Scholar] [CrossRef]
- Zheng, H.; Yu, H.; Zhang, Y.; Lu, Y.; Shao, T.; Tang, M.; Zhu, J. The Design of A Tethered Unmanned Aerial Vehicle (UAV). In Proceedings of the 2021 International Conference on Mechanical, Aerospace and Automotive Engineering, Changsha, China, 3–5 December 2021; pp. 74–79. [Google Scholar] [CrossRef]
- Fagiano, L.; Nguyen-Van, E.; Rager, F.; Schnez, S.; Ohler, C. A Small-Scale Prototype to Study the Takeoff of Tethered Rigid Aircrafts for Airborne Wind Energy. IEEE/ASME Trans. Mechatron. 2017, 22, 1869–1880. [Google Scholar] [CrossRef] [Green Version]
- Healy, F.; Pontillo, A.; Rezgui, D.; Cooper, J.; Kirk, J.; Wilson, T.; Castrichini, A. Experimental Analysis of the Dynamics of Flared Folding Wingtips via a Novel Tethered Flight Test. In Proceedings of the AIAA Science and Technology Forum and Exposition 2022, San Diego, CA, USA, 3–7 January 2022. [Google Scholar] [CrossRef]
- Talke, K.; Birchmore, F.; Bewley, T. Autonomous hanging tether management and experimentation for an unmanned air-surface vehicle team. J. Field Robot. 2022, 39, 869–887. [Google Scholar] [CrossRef]
- Sinha, G.; Meena, D.; Nandita, B. Feasibility study on replacement of coaxial cables with optical fiber links in UAVs. In Proceedings of the 2022 IEEE International Conference on Electronics, Computing and Communication Technologies (CONECCT), Bangalore, India, 8–10 July 2022; pp. 1–6. [Google Scholar] [CrossRef]
- Longtao, X.; Zhizhuang, F.; Chen, L. Modal analysis of tethered UAV system under tension. In Proceedings of the 2022 4th International Conference on Artificial Intelligence and Advanced Manufacturing (AIAM), Hamburg, Germany, 7–9 October 2022; pp. 484–490. [Google Scholar] [CrossRef]
- Tao, Y.; Zhang, S. Research on the Vibration and Wave Propagation in Ship-Borne Tethered UAV Using Stress Wave Method. Drones 2022, 6, 349. [Google Scholar] [CrossRef]
- Kourani, A.; Daher, N. Three-dimensional modeling of a tethered UAV-buoy system with relative-positioning and directional surge velocity control. Nonlinear Dyn. 2022, 111, 1245–1268. [Google Scholar] [CrossRef]
- Chisholm, H. Teisserenc de Bort, Léon Philippe, 12th ed.; Encyclopædia Britannica: London, UK; New York, NY, USA, 1922. [Google Scholar]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Scope | References |
|---|---|
| Transportation | [20,21,22,23,24,25,26,27,28,29,30,31,32,33,34,35,36,37,38,39,40,41,42,43,44,45,46,47,48,49,50,51,52,53,54,55,56,57,58,59,60,61,62,63,64,65,66,67,68,69,70,71,72,73,74,75,76,77,78,79,80,81,82,83,84,85,86,87,88] |
| Control and Navigation | [89,90,91,92,93,94,95,96,97,98,99,100,101,102,103,104,105,106,107,108,109,110,111,112,113,114,115,116,117,118,119,120,121,122,123,124,125,126,127,128,129,130,131,132,133,134,135,136,137,138,139,140,141,142,143] |
| Meteorology | [144,145,146,147,148,149,150,151,152,153,154] |
| Wind Energy Generation | [155,156,157,158,159,160,161,162,163,164,165,166,167] |
| Telecommunications | [168,169,170,171,172,173,174,175,176,177,178] |
| Power Module Design | [8,179,180,181,182,183,184,185,186] |
| Image Processing | [187,188,189,190,191,192] |
| Other | [193,194,195,196,197,198,199,200,201] |
| Technical Issue Addressed | Publication Scope | Example Publication |
|---|---|---|
| Tether pose | Transportation | [91] |
| estimation | UAV–USV Cooperation | [103] |
| Wind disturbance | Transportation | [24] |
| mitigation | tUAV control | [121] |
| Control considering | Transportation | [25,56] |
| tether influence | Inspection | [190] |
| Control and Navigation Issue Addressed | Publications |
|---|---|
| Control model | [92,101,102,105,107,111,112,114,116,117,126,132,137,138,142,143,201] |
| Localisation | [89,97,98,99,104,108,120,123,124,125,128] |
| Navigation | [91,93,94,95,106,129,130,133,134,135,139,140,141] |
| PID Tuning | [110] |
| Tether pose estimation and control | [90,103,115,118,121,197] |
| Tethered landing | [119,127] |
| Tethered UAV stabilization | [96,113,122] |
| UAV and UGV cooperation (moving) | [100,136] |
| UAV takeoff and flight control | [109,131] |
| Reason for Not Transferring Power over the Tether | Publications |
|---|---|
| No connection between UAV and ground | [20,21,22,23,24,25,26,27,28,29,30,31,32,33,34,35,36,37,38,39,40,41,42,43,44,47,48,50,51,53,54,55,56,58,59,60,61,62,63,64,65,66,67,68,69,71,74,75,76,77,78,79,80,81,82,83,86,87,88,90,91,129,134,137,140,143] |
| Connection for mechanical purposes during part of the operation | [193] (only during recovery of payload) [119,131] |
| Very high operating altitude (>1 km) | [147,148,175] |
| Short-term missions (inspection) | [133,163] |
| Operational Altitude | ||||||
|---|---|---|---|---|---|---|
| Propulsion Method | 0 m | ≤3 m | 4 m to 10 m | 11 m to 20 m | 21 m to 100 m | >100 m |
| Multirotor | [42,46,63,69,73,81,87,100,108,122,124,128,132,141,142,143,172,177,180,187,189,190,194] | [20,21,23,24,27,29,30,33,37,38,39,40,41,43,48,49,50,53,56,57,60,61,64,66,68,72,75,77,78,88,89,91,92,94,96,97,98,104,110,111,113,116,123,125,126,134,137,139,140,167,176,200] | [25,28,32,45,47,52,54,58,65,67,70,71,82,84,85,95,99,105,106,115,130,201] | [44,51,59,62,74,80,83,86,93,103,112,135,136,152,183,192] | [8,31,55,102,114,120,127,133,138,156,169,170,171,181,182,184,186,188,191,197,199] | [79,90,118,121,131,153,163,168,174,178,179] |
| Fixed wing | [101,157,164,185,196,198] | ∅ | [166] | [107,109,195] | [22,159] | [34,35,36,76,117,129,145,158,160,161,162,165,193] |
| Lighter than air | ∅ | ∅ | [173] | ∅ | ∅ | [144,146,147,148,149,150,151,154,155,175] |
| Helicopter | ∅ | ∅ | ∅ | [26,119] | ∅ | ∅ |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Marques, M.N.; Magalhães, S.A.; Dos Santos, F.N.; Mendonça, H.S. Tethered Unmanned Aerial Vehicles—A Systematic Review. Robotics 2023, 12, 117. https://doi.org/10.3390/robotics12040117
Marques MN, Magalhães SA, Dos Santos FN, Mendonça HS. Tethered Unmanned Aerial Vehicles—A Systematic Review. Robotics. 2023; 12(4):117. https://doi.org/10.3390/robotics12040117
Chicago/Turabian StyleMarques, Miguel Nakajima, Sandro Augusto Magalhães, Filipe Neves Dos Santos, and Hélio Sousa Mendonça. 2023. "Tethered Unmanned Aerial Vehicles—A Systematic Review" Robotics 12, no. 4: 117. https://doi.org/10.3390/robotics12040117
APA StyleMarques, M. N., Magalhães, S. A., Dos Santos, F. N., & Mendonça, H. S. (2023). Tethered Unmanned Aerial Vehicles—A Systematic Review. Robotics, 12(4), 117. https://doi.org/10.3390/robotics12040117