

An Autonomous Navigation Framework for Holonomic Mobile Robots in Confined Agricultural Environments

 , , , , ,
, , , , ,  and
and
Abstract
:1. Introduction
2. Related Work
3. Materials and Methods
3.1. Robotic Platform
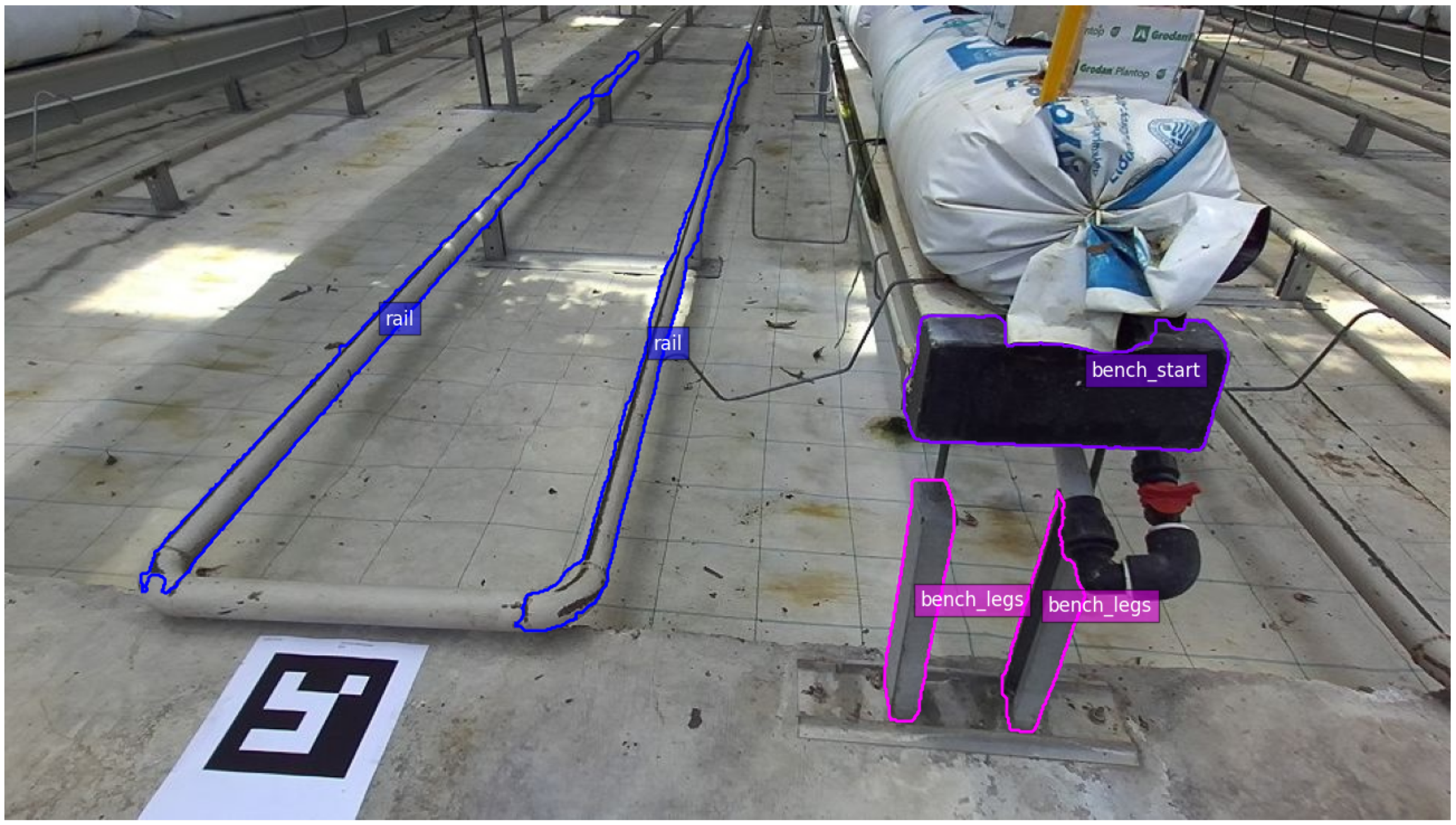
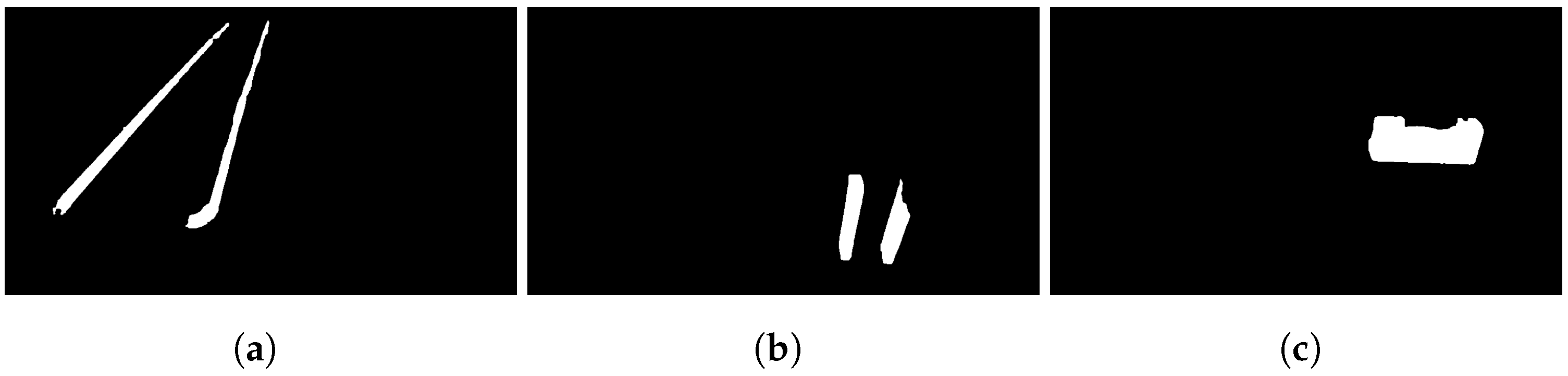
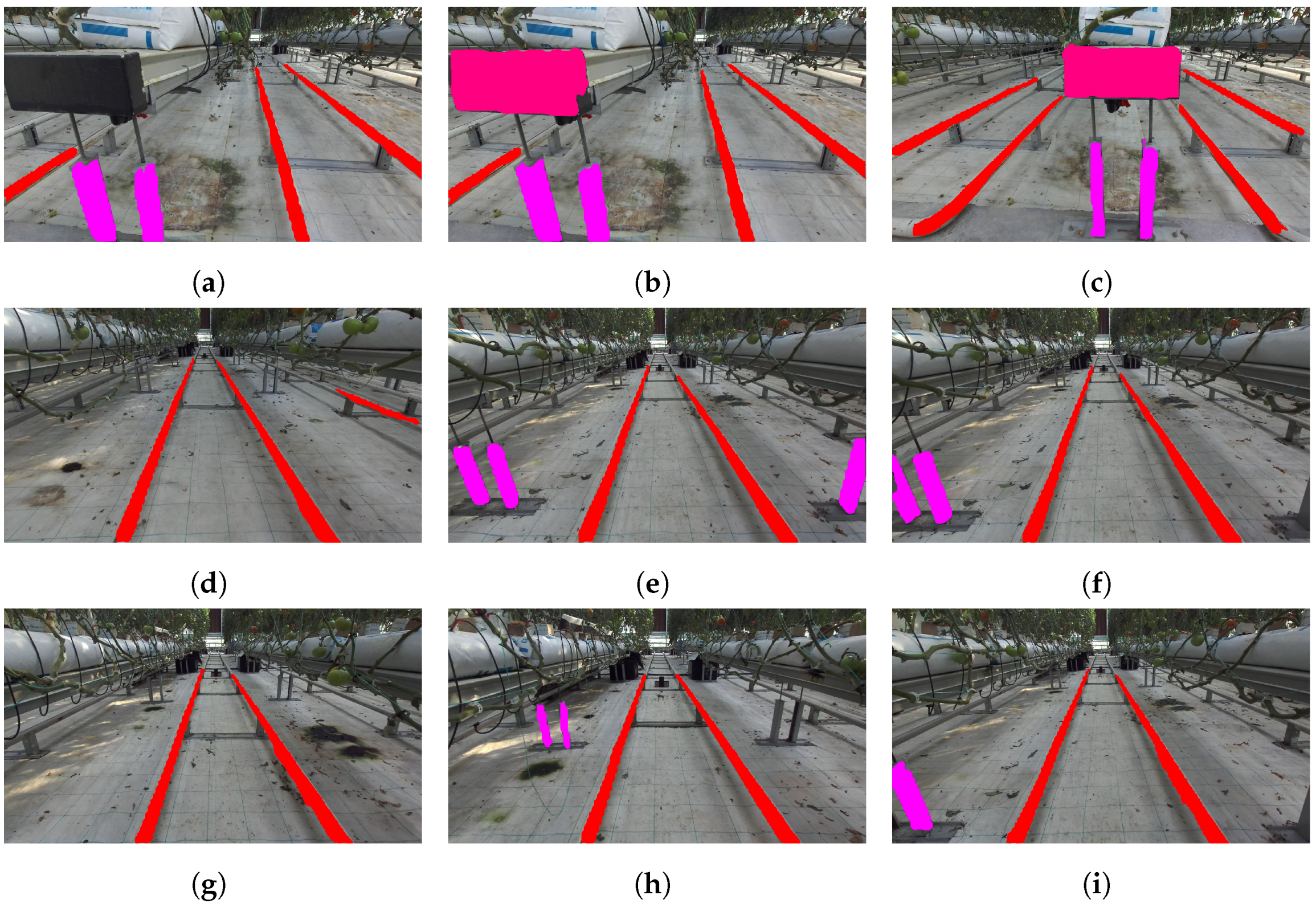
3.2. Greenhouse Semantic Segmentation
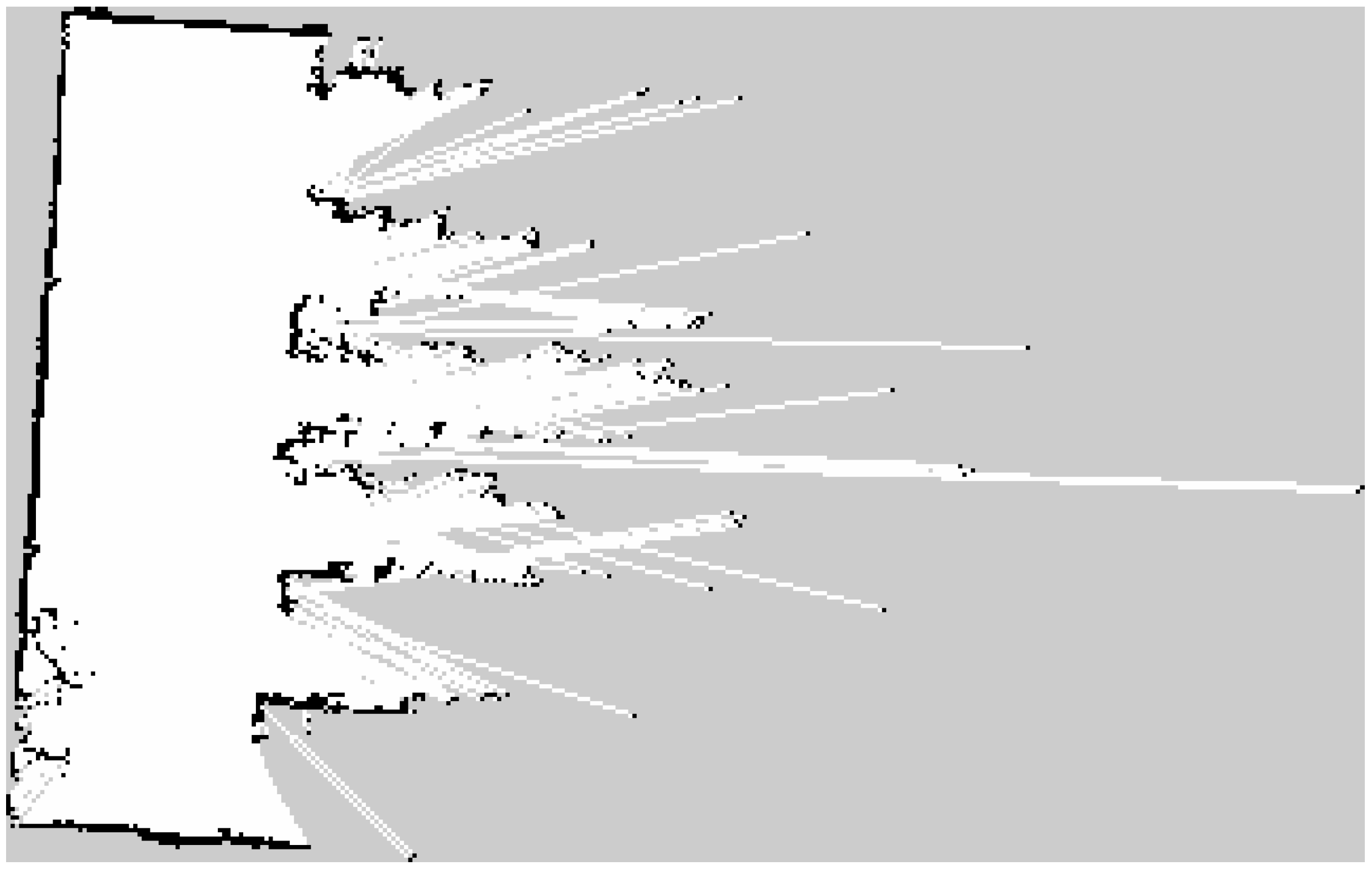
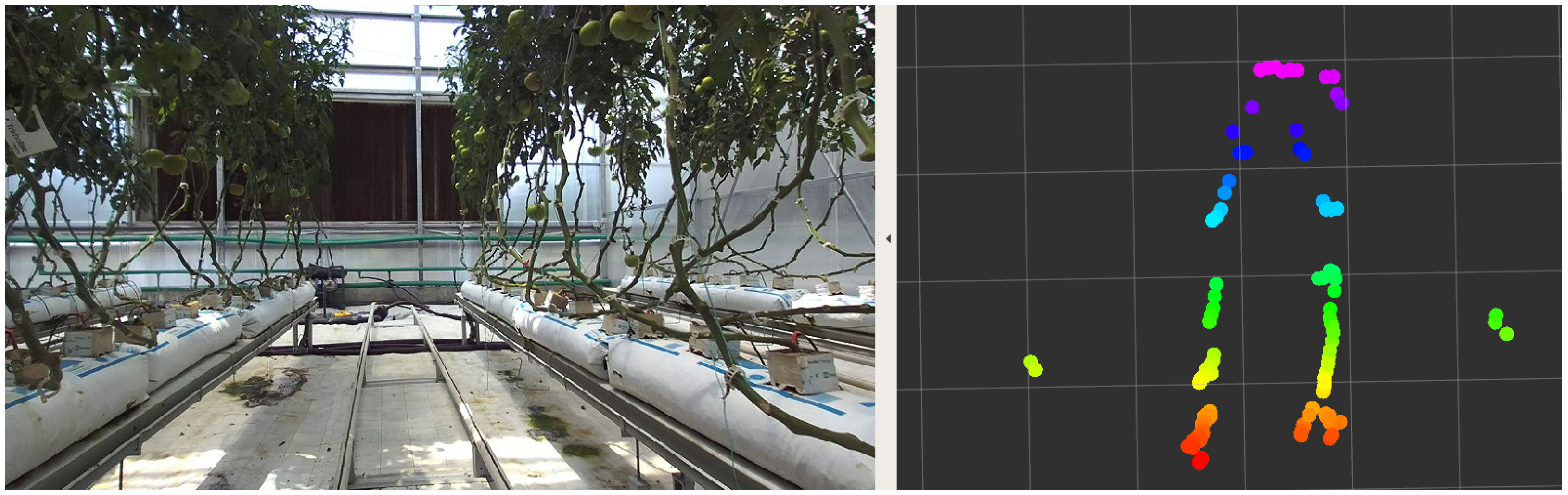
3.3. Mapping & Localization
- Three dimensional (3D) pose (x, y, z);
- Three dimensional (3D) orientation (, , );
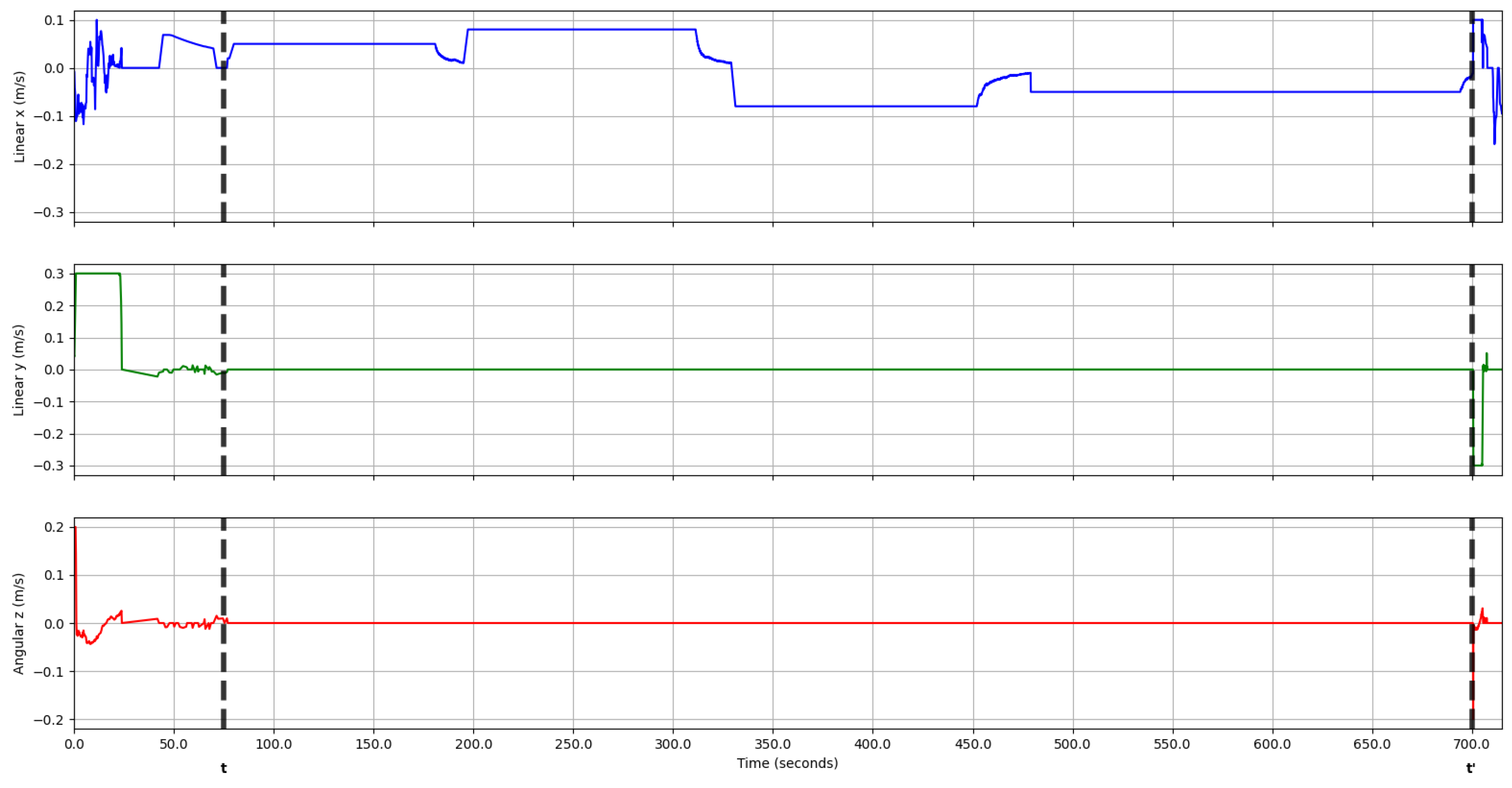
- The corresponding velocities of the above (x, y, z, , , );
- The acceleration of the 3D pose (x, y, z).
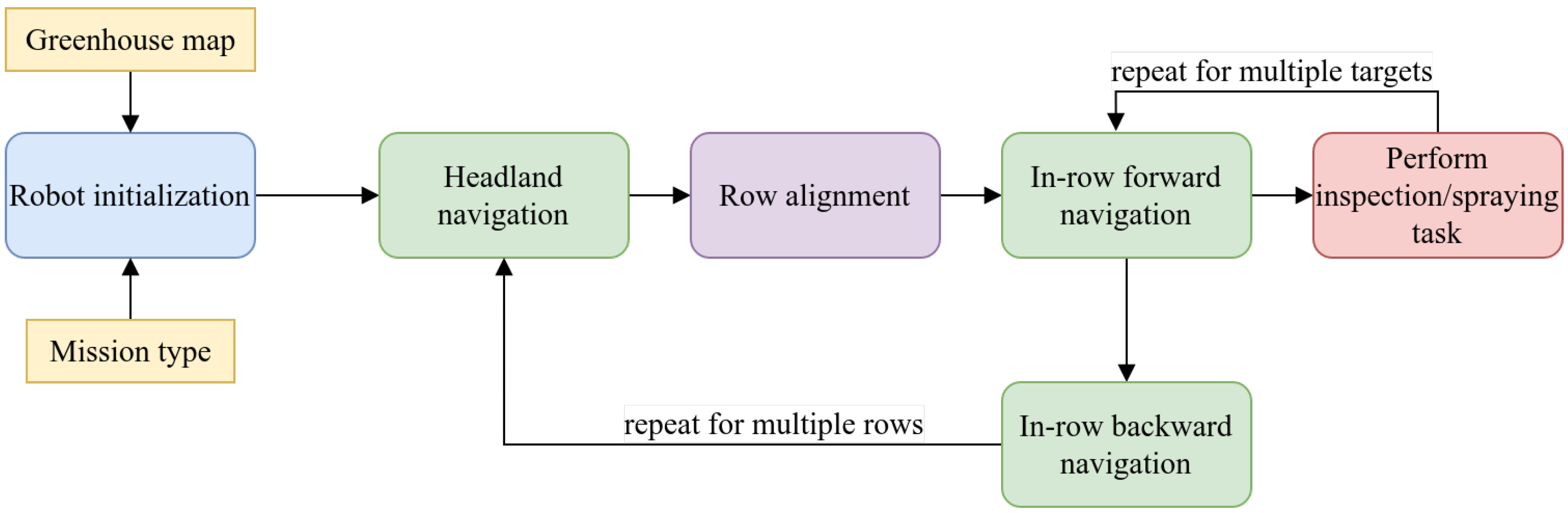
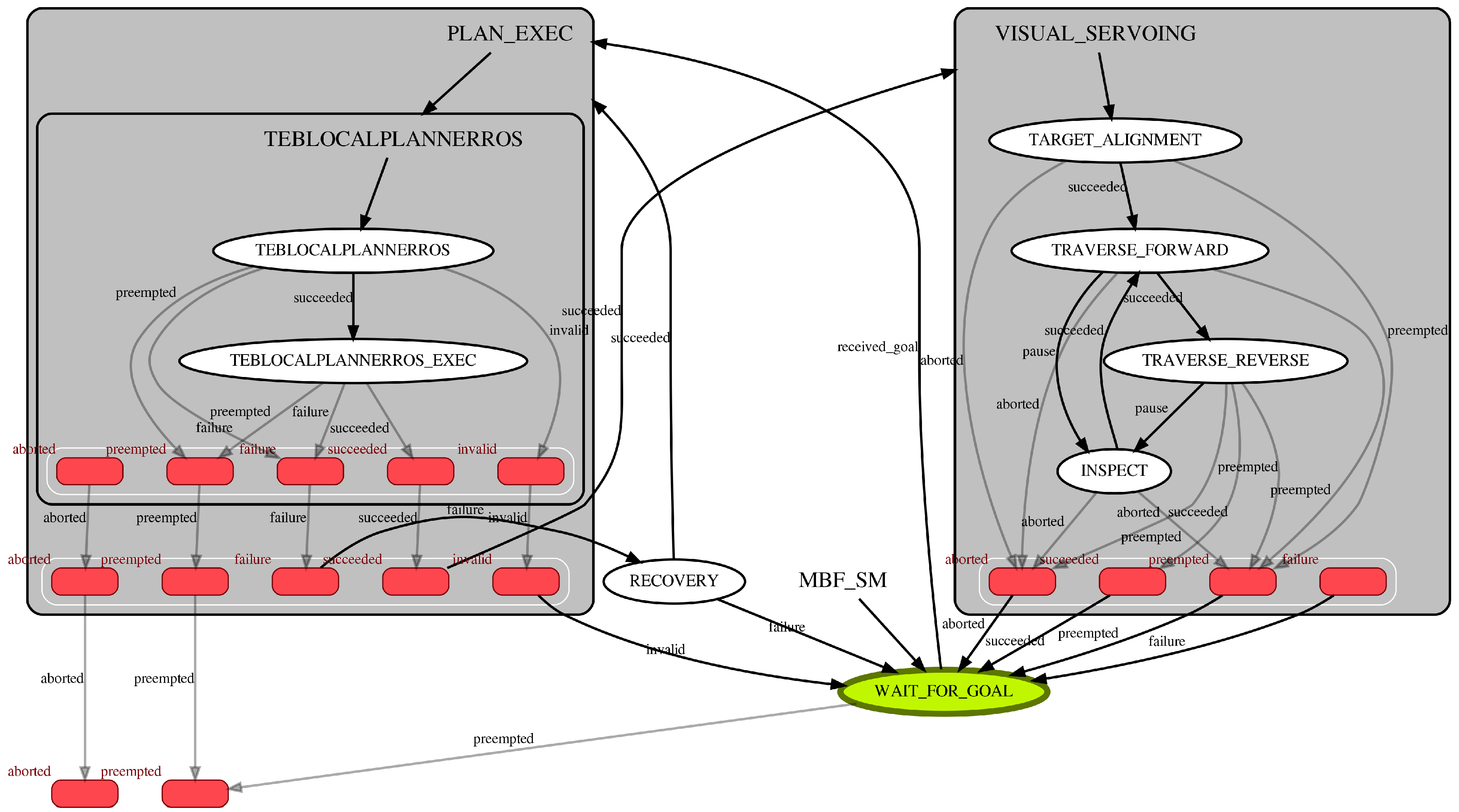
3.4. Navigation Strategy
3.5. Headland Navigation
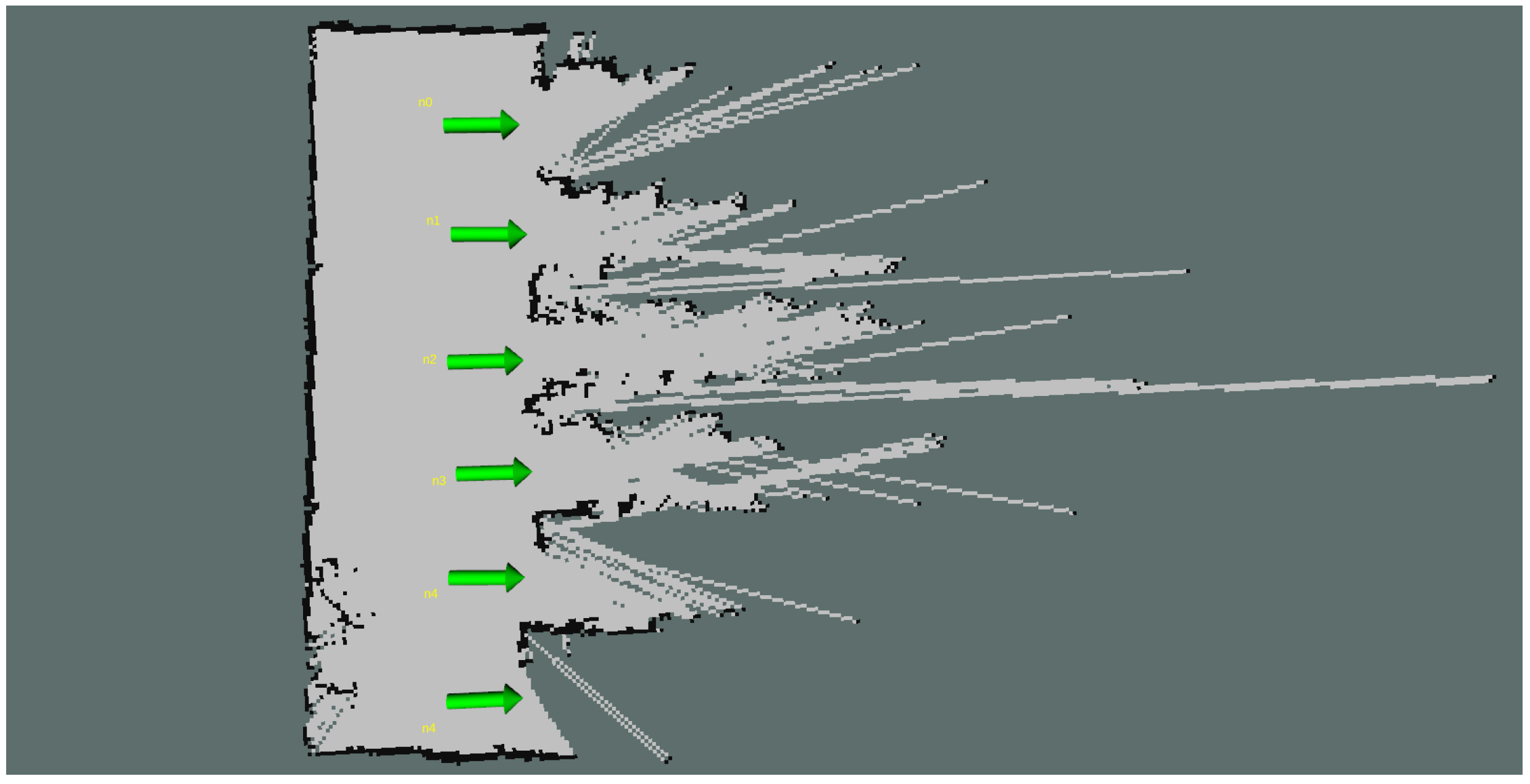
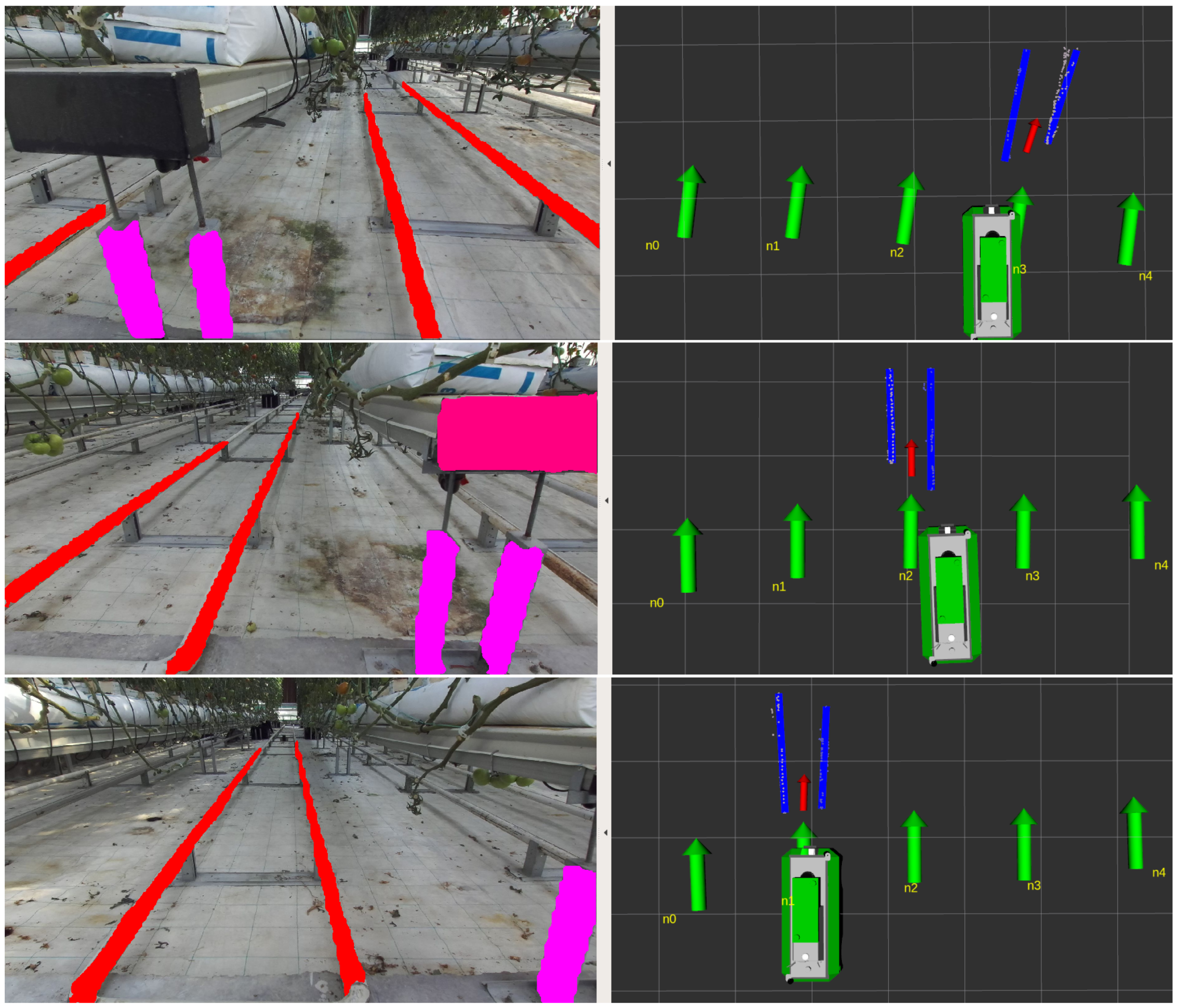
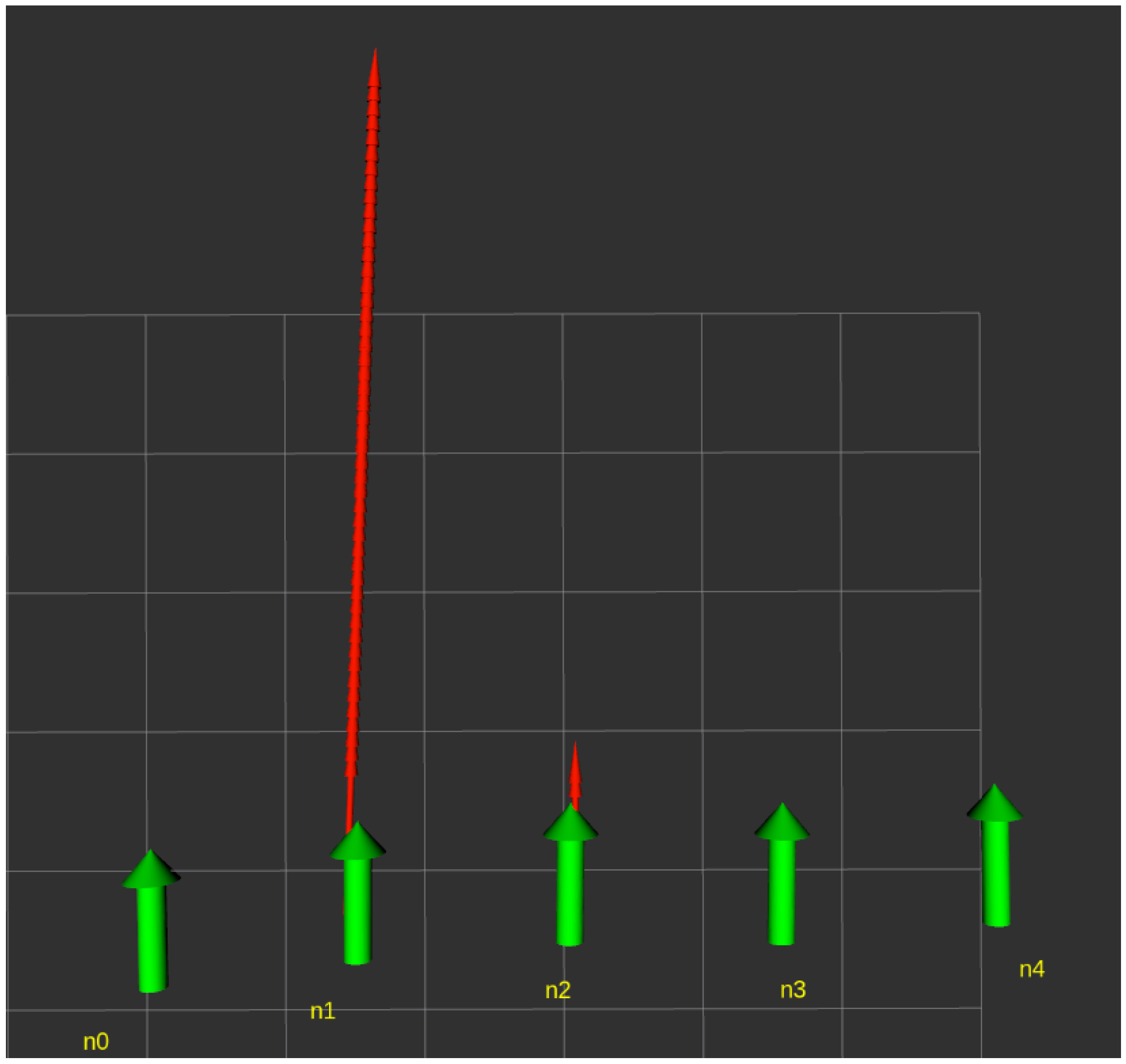
3.6. Rails Alignment
3.7. Rails Navigation
4. Experimental Evaluation
4.1. Semantic Segmentation
4.2. Rails Alignment
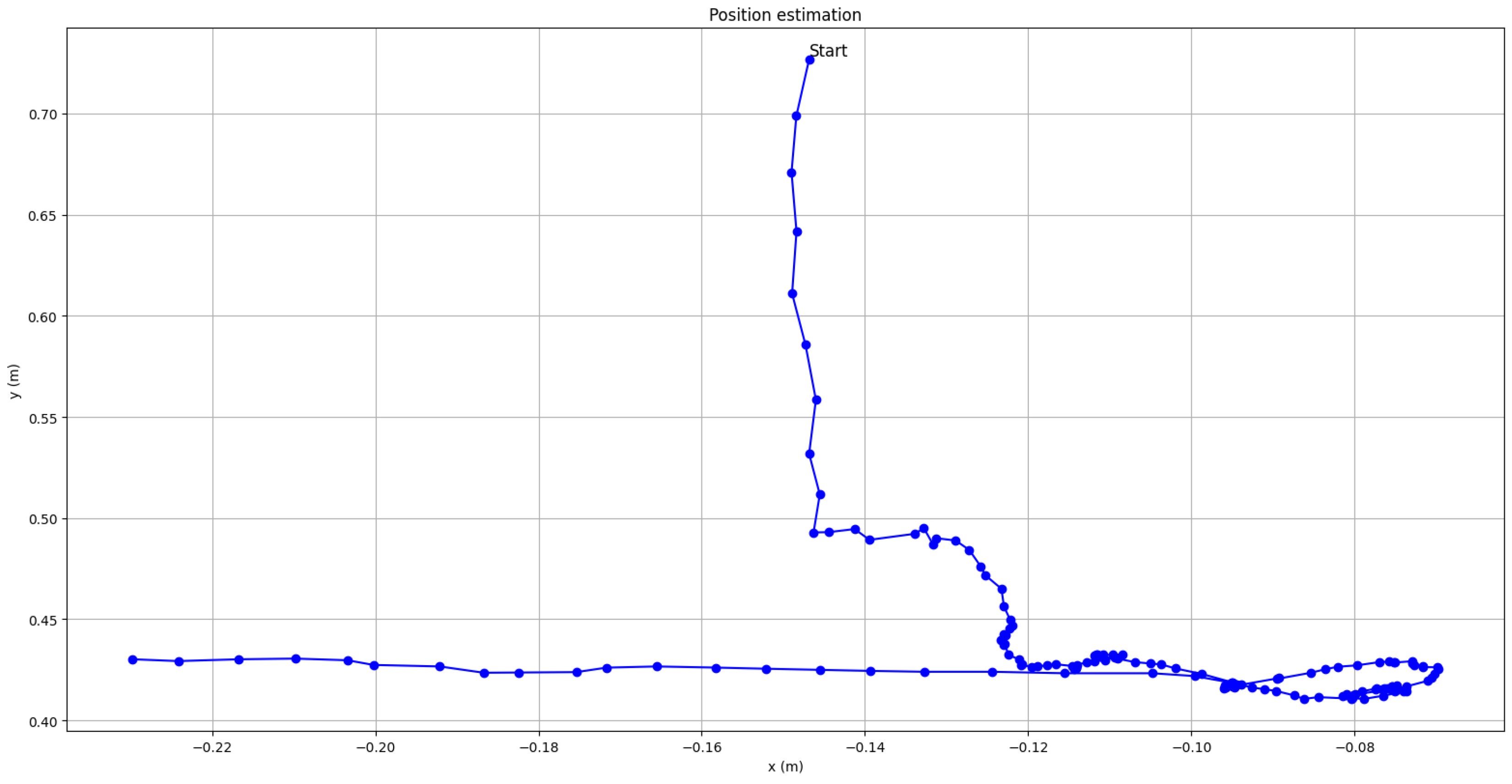
4.3. In-Row Localization
4.4. Closed-Loop Navigation
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| AMR | Autonomouw Mobile Robot |
| AMCL | Adaptive Monte Carlo Localization |
| APF | Artificial Potential Field |
| DWA | Dynamic Window Approach |
| EKF | Extended Kalman Filter |
| GNSS | Global Navigation Satellite System |
| IMU | Inertial Measurement Unit |
| LiDAR | Light Detection and Ranging |
| RANSAC | RANdom SAmple Consensus |
| RGB | Red Green Blue |
| TEB | Timed Elastic Band |
| UAV | Unmanned Aerial Vehicle |
| UV | Ultraviolet |
| YOLO | You Only Look Once |
References
- Sarkar, S.; Gil, J.D.B.; Keeley, J.; Jansen, K. The Use of Pesticides in Developing Countries and Their Impact on Health and the Right to Food; European Union: Maastricht, The Netherlands, 2021. [Google Scholar]
- Sharma, A.; Kumar, V.; Shahzad, B.; Tanveer, M.; Sidhu, G.P.S.; Handa, N.; Kohli, S.K.; Yadav, P.; Bali, A.S.; Parihar, R.D.; et al. Worldwide pesticide usage and its impacts on ecosystem. SN Appl. Sci. 2019, 1, 1446. [Google Scholar] [CrossRef]
- Balaska, V.; Adamidou, Z.; Vryzas, Z.; Gasteratos, A. Sustainable Crop Protection via Robotics and Artificial Intelligence Solutions. Machines 2023, 11, 774. [Google Scholar] [CrossRef]
- Vatistas, C.; Avgoustaki, D.D.; Bartzanas, T. A systematic literature review on controlled-environment agriculture: How vertical farms and greenhouses can influence the sustainability and footprint of urban microclimate with local food production. Atmosphere 2022, 13, 1258. [Google Scholar] [CrossRef]
- Bagagiolo, G.; Matranga, G.; Cavallo, E.; Pampuro, N. Greenhouse Robots: Ultimate Solutions to Improve Automation in Protected Cropping Systems—A Review. Sustainability 2022, 14, 6436. [Google Scholar] [CrossRef]
- Prathibha, S.; Hongal, A.; Jyothi, M. IoT based monitoring system in smart agriculture. In Proceedings of the 2017 International Conference on Recent Advances in Electronics and Communication Technology (ICRAECT), Bangalore, India, 16–17 March 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 81–84. [Google Scholar]
- Abhiram, R.; Megalingam, R.K. Autonomous Fertilizer Spraying Mobile Robot. In Proceedings of the 2022 IEEE 19th India Council International Conference (INDICON), Kochi, India, 24–26 November 2022; pp. 1–6. [Google Scholar] [CrossRef]
- Fountas, S.; Mylonas, N.; Malounas, I.; Rodias, E.; Hellmann Santos, C.; Pekkeriet, E. Agricultural robotics for field operations. Sensors 2020, 20, 2672. [Google Scholar] [CrossRef]
- Grimstad, L.; Zakaria, R.; Le, T.D.; From, P.J. A novel autonomous robot for greenhouse applications. In Proceedings of the 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, 1–5 October 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 1–9. [Google Scholar]
- Winterhalter, W.; Fleckenstein, F.; Dornhege, C.; Burgard, W. Localization for precision navigation in agricultural fields—Beyond crop row following. J. Field Robot. 2021, 38, 429–451. [Google Scholar] [CrossRef]
- Chan, S.H.; Wu, P.T.; Fu, L.C. Robust 2D indoor localization through laser SLAM and visual SLAM fusion. In Proceedings of the 2018 IEEE International Conference on Systems, Man, and Cybernetics (SMC), Miyazaki, Japan, 7–10 October 2018; IEEE: Piscataway, NJ, USA; pp. 1263–1268. [Google Scholar]
- Chen, H.; Lan, Y.; Fritz, B.K.; Hoffmann, W.C.; Liu, S. Review of agricultural spraying technologies for plant protection using unmanned aerial vehicle (UAV). Int. J. Agric. Biol. Eng. 2021, 14, 38–49. [Google Scholar] [CrossRef]
- Bellicoso, C.D.; Bjelonic, M.; Wellhausen, L.; Holtmann, K.; Günther, F.; Tranzatto, M.; Fankhauser, P.; Hutter, M. Advances in real-world applications for legged robots. J. Field Robot. 2018, 35, 1311–1326. [Google Scholar] [CrossRef]
- McCool, C.; Perez, T.; Upcroft, B. Mixtures of lightweight deep convolutional neural networks: Applied to agricultural robotics. IEEE Robot. Autom. Lett. 2017, 2, 1344–1351. [Google Scholar] [CrossRef]
- Yan, B.; Fan, P.; Lei, X.; Liu, Z.; Yang, F. A real-time apple targets detection method for picking robot based on improved YOLOv5. Remote Sens. 2021, 13, 1619. [Google Scholar] [CrossRef]
- Xiong, Y.; Ge, Y.; Grimstad, L.; From, P.J. An autonomous strawberry-harvesting robot: Design, development, integration, and field evaluation. J. Field Robot. 2020, 37, 202–224. [Google Scholar] [CrossRef]
- Kleitsiotis, I.; Mariolis, I.; Giakoumis, D.; Likothanassis, S.; Tzovaras, D. Anisotropic Diffusion-Based Enhancement of Scene Segmentation with Instance Labels. In Proceedings of the Computer Analysis of Images and Patterns: 19th International Conference, CAIP 2021, Virtual Event, 28–30 September 2021; Springer: Berlin/Heidelberg, Germany, 2021; pp. 383–391. [Google Scholar]
- González, R.; Rodríguez, F.; Sánchez-Hermosilla, J.; Donaire, J.G. Navigation techniques for mobile robots in greenhouses. Appl. Eng. Agric. 2009, 25, 153–165. [Google Scholar] [CrossRef]
- Jiang, S.; Wang, S.; Yi, Z.; Zhang, M.; Lv, X. Autonomous navigation system of greenhouse mobile robot based on 3D Lidar and 2D Lidar SLAM. Front. Plant Sci. 2022, 13, 815218. [Google Scholar] [CrossRef] [PubMed]
- Harik, E.H.C.; Korsaeth, A. Combining Hector SLAM and Artificial Potential Field for Autonomous Navigation Inside a Greenhouse. Robotics 2018, 7, 22. [Google Scholar] [CrossRef]
- Wu, C.; Tang, X.; Xu, X. System Design, Analysis, and Control of an Intelligent Vehicle for Transportation in Greenhouse. Agriculture 2023, 13, 1020. [Google Scholar] [CrossRef]
- Fei, M.; Wendong, H.; Wu, C.; Sai, W. Design and experimental test of multi-functional intelligent vehicle for greenhouse. In Proceedings of the 2021 4th IEEE International Conference on Industrial Cyber-Physical Systems (ICPS), Victoria, BC, Canada, 10–12 May 2021; IEEE: Piscataway, NJ, USA, 2021; pp. 755–760. [Google Scholar]
- Ahmadi, A.; Nardi, L.; Chebrolu, N.; Stachniss, C. Visual servoing-based navigation for monitoring row-crop fields. In Proceedings of the 2020 IEEE International Conference on Robotics and Automation (ICRA), Paris, France, 31 May–31 August 2020; IEEE: Piscataway, NJ, USA, 2020; pp. 4920–4926. [Google Scholar]
- Ahmadi, A.; Halstead, M.; McCool, C. Towards Autonomous Visual Navigation in Arable Fields. In Proceedings of the 2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Kyoto, Japan, 23–27 October 2022; IEEE: Piscataway, NJ, USA, 2022; pp. 6585–6592. [Google Scholar]
- Chen, J.; Qiang, H.; Wu, J.; Xu, G.; Wang, Z.; Liu, X. Extracting the navigation path of a tomato-cucumber greenhouse robot based on a median point Hough transform. Comput. Electron. Agric. 2020, 174, 105472. [Google Scholar] [CrossRef]
- Panda, S.K.; Lee, Y.; Jawed, M.K. Agronav: Autonomous Navigation Framework for Agricultural Robots and Vehicles using Semantic Segmentation and Semantic Line Detection. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Vancouver, BC, Canada, 18–22 June 2023; pp. 6271–6280. [Google Scholar]
- Giakoumoglou, N.; Pechlivani, E.M.; Katsoulas, N.; Tzovaras, D. White flies and black aphids detection in field vegetable crops using deep learning. In Proceedings of the 2022 IEEE 5th International Conference on Image Processing Applications and Systems (IPAS), Genova, Italy, 5–7 December 2022; IEEE: Piscataway, NJ, USA, 2022; pp. 1–6. [Google Scholar]
- Giakoumoglou, N.; Pechlivani, E.M.; Sakelliou, A.; Klaridopoulos, C.; Frangakis, N.; Tzovaras, D. Deep learning-based multi-spectral identification of grey mould. Smart Agric. Technol. 2023, 4, 100174. [Google Scholar] [CrossRef]
- Pechlivani, E.M.; Gkogkos, G.; Giakoumoglou, N.; Hadjigeorgiou, I.; Tzovaras, D. Towards Sustainable Farming: A Robust Decision Support System’s Architecture for Agriculture 4.0. In Proceedings of the 2023 24th International Conference on Digital Signal Processing (DSP), Rhodes (Rodos), Greece, 11–13 June 2023; IEEE: Piscataway, NJ, USA, 2023; pp. 1–5. [Google Scholar]
- Jocher, G.; Chaurasia, A.; Qiu, J. YOLO, Version 8.0.0, Ultralytics: Los Angeles, CA, USA, 2023.
- Grisetti, G.; Stachniss, C.; Burgard, W. Improving grid-based slam with rao-blackwellized particle filters by adaptive proposals and selective resampling. In Proceedings of the 2005 IEEE International Conference on Robotics and Automation, Barcelona, Spain, 18–22 April 2005; IEEE: Piscataway, NJ, USA, 2005; pp. 2432–2437. [Google Scholar]
- Fox, D.; Burgard, W.; Dellaert, F.; Thrun, S. Monte carlo localization: Efficient position estimation for mobile robots. Aaai/iaai 1999, 343–349. [Google Scholar]
- Pütz, S.; Simón, J.S.; Hertzberg, J. Move Base Flex: A Highly Flexible Navigation Framework for Mobile Robots. In Proceedings of the 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, 1–5 October 2018; Available online: https://github.com/magazino/move_base_flex (accessed on 5 October 2023).
- Fischler, M.A.; Bolles, R.C. Random sample consensus: A paradigm for model fitting with applications to image analysis and automated cartography. Commun. ACM 1981, 24, 381–395. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Dimensions | 2.2 × 0.7 m |
| Maximum velocity | 3 km/h |
| Autonomy | 4.5 h |
| Batteries’ type | LiFePO4 Battery 48V-72A |
| Payload | 15 Kg |
| Sensor | x | y | x | y | x | y | ||
|---|---|---|---|---|---|---|---|---|
| Odometry | × | × | × | ✓ | ✓ | ✓ | × | × |
| IMU | × | × | × | × | × | ✓ | ✓ | ✓ |
| AMCL | ✓ | ✓ | ✓ | × | × | × | × | × |
| In-row | ✓ | ✓ | ✓ | × | × | × | × | × |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tsiakas, K.; Papadimitriou, A.; Pechlivani, E.M.; Giakoumis, D.; Frangakis, N.; Gasteratos, A.; Tzovaras, D. An Autonomous Navigation Framework for Holonomic Mobile Robots in Confined Agricultural Environments. Robotics 2023, 12, 146. https://doi.org/10.3390/robotics12060146
Tsiakas K, Papadimitriou A, Pechlivani EM, Giakoumis D, Frangakis N, Gasteratos A, Tzovaras D. An Autonomous Navigation Framework for Holonomic Mobile Robots in Confined Agricultural Environments. Robotics. 2023; 12(6):146. https://doi.org/10.3390/robotics12060146
Chicago/Turabian StyleTsiakas, Kosmas, Alexios Papadimitriou, Eleftheria Maria Pechlivani, Dimitrios Giakoumis, Nikolaos Frangakis, Antonios Gasteratos, and Dimitrios Tzovaras. 2023. "An Autonomous Navigation Framework for Holonomic Mobile Robots in Confined Agricultural Environments" Robotics 12, no. 6: 146. https://doi.org/10.3390/robotics12060146
APA StyleTsiakas, K., Papadimitriou, A., Pechlivani, E. M., Giakoumis, D., Frangakis, N., Gasteratos, A., & Tzovaras, D. (2023). An Autonomous Navigation Framework for Holonomic Mobile Robots in Confined Agricultural Environments. Robotics, 12(6), 146. https://doi.org/10.3390/robotics12060146