

Applying Screw Theory to Design the Turmell-Bot: A Cable-Driven, Reconfigurable Ankle Rehabilitation Parallel Robot



Abstract
:1. Introduction
Related Work
2. Materials and Methods
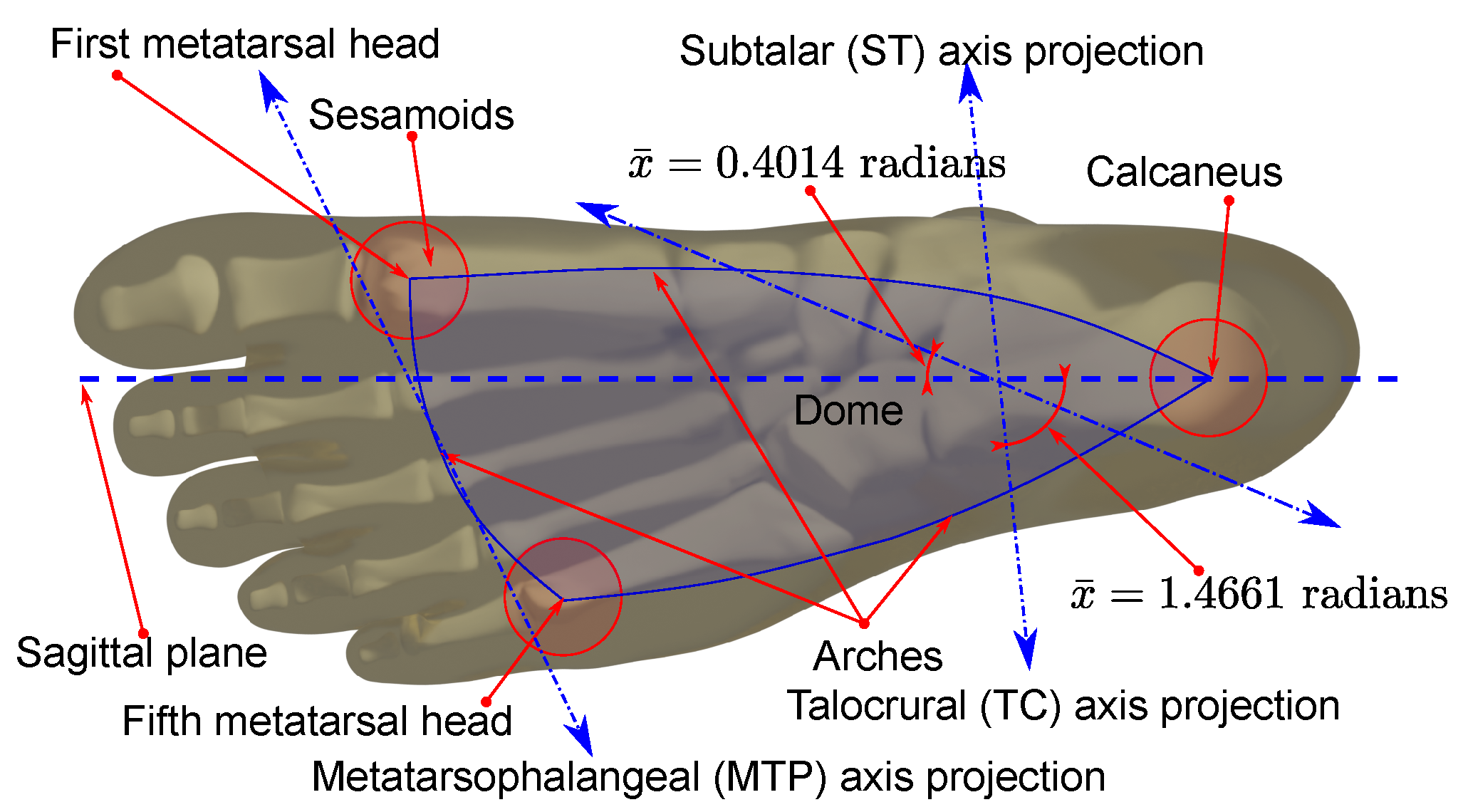
2.1. Robot Inspired on the Analysis of the Ankle Joint
2.1.1. Ankle-Foot Tendons
2.1.2. Foot Compression Forces
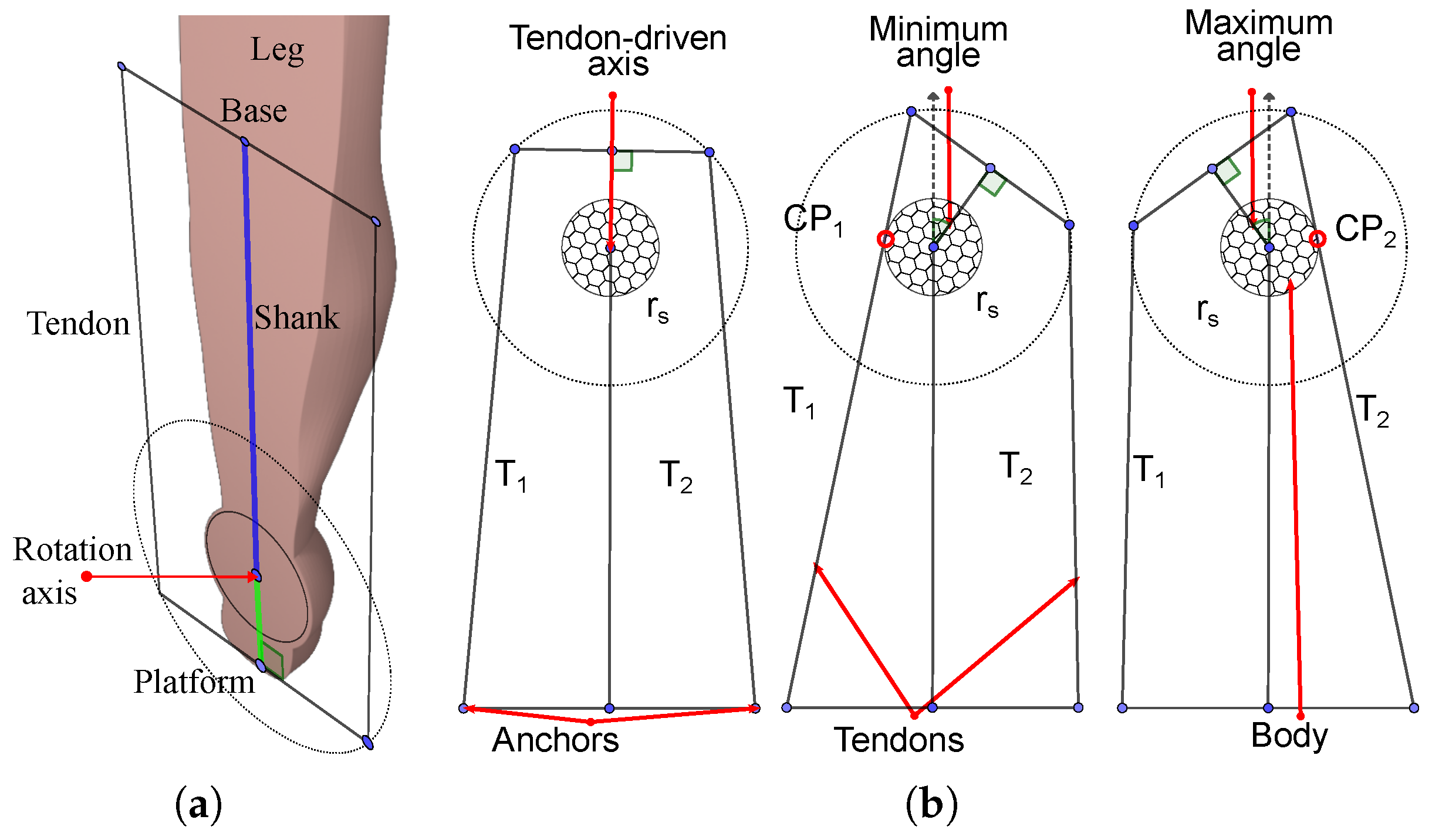
2.1.3. Robot Based on the Ankle-Foot Model
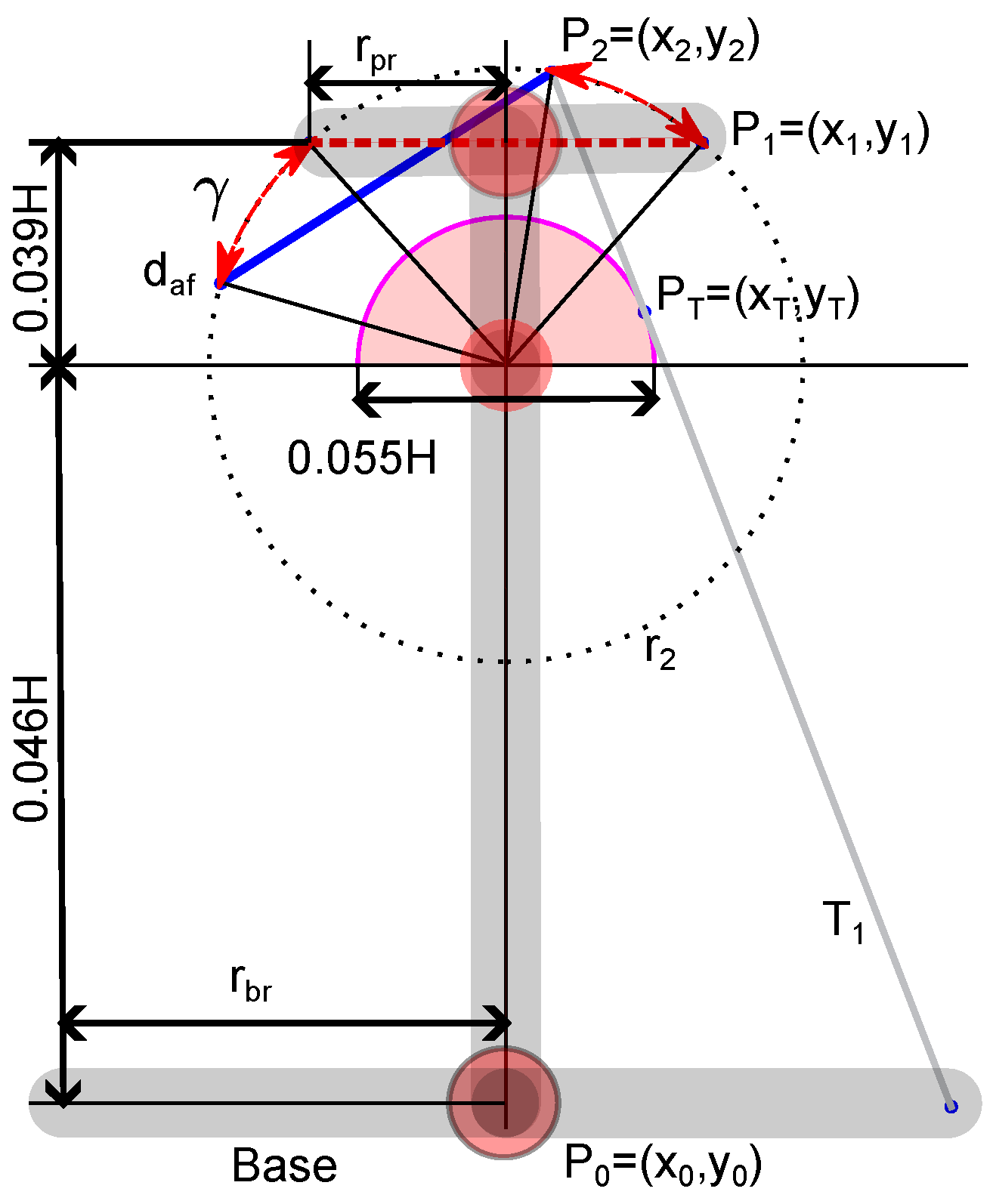
2.1.4. Dimensions and Initial Configuration
2.2. Ankle Kinematic Model
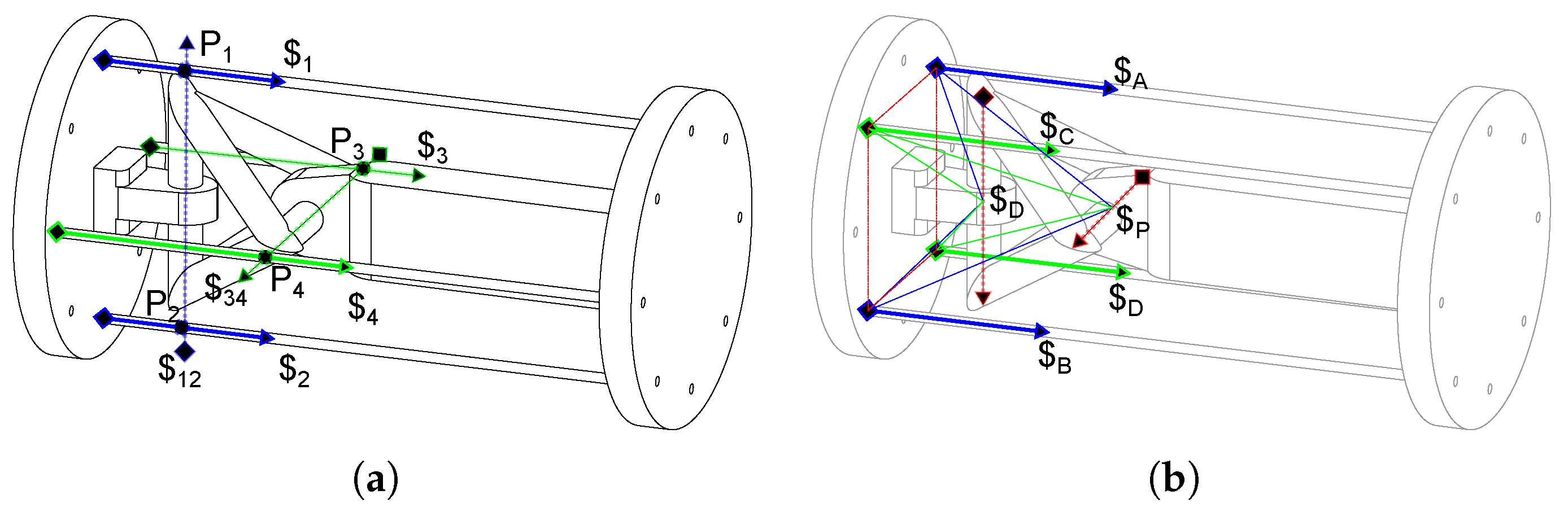
2.3. Synthesis of the Parallel Tendon-Driven Robot
Cable-Driven Two-Rotational Serial Chain
2.4. Robot Configuration
3. Workspace from the Product of Exponentials
Reconfiguration and Statics Simulation
4. Results
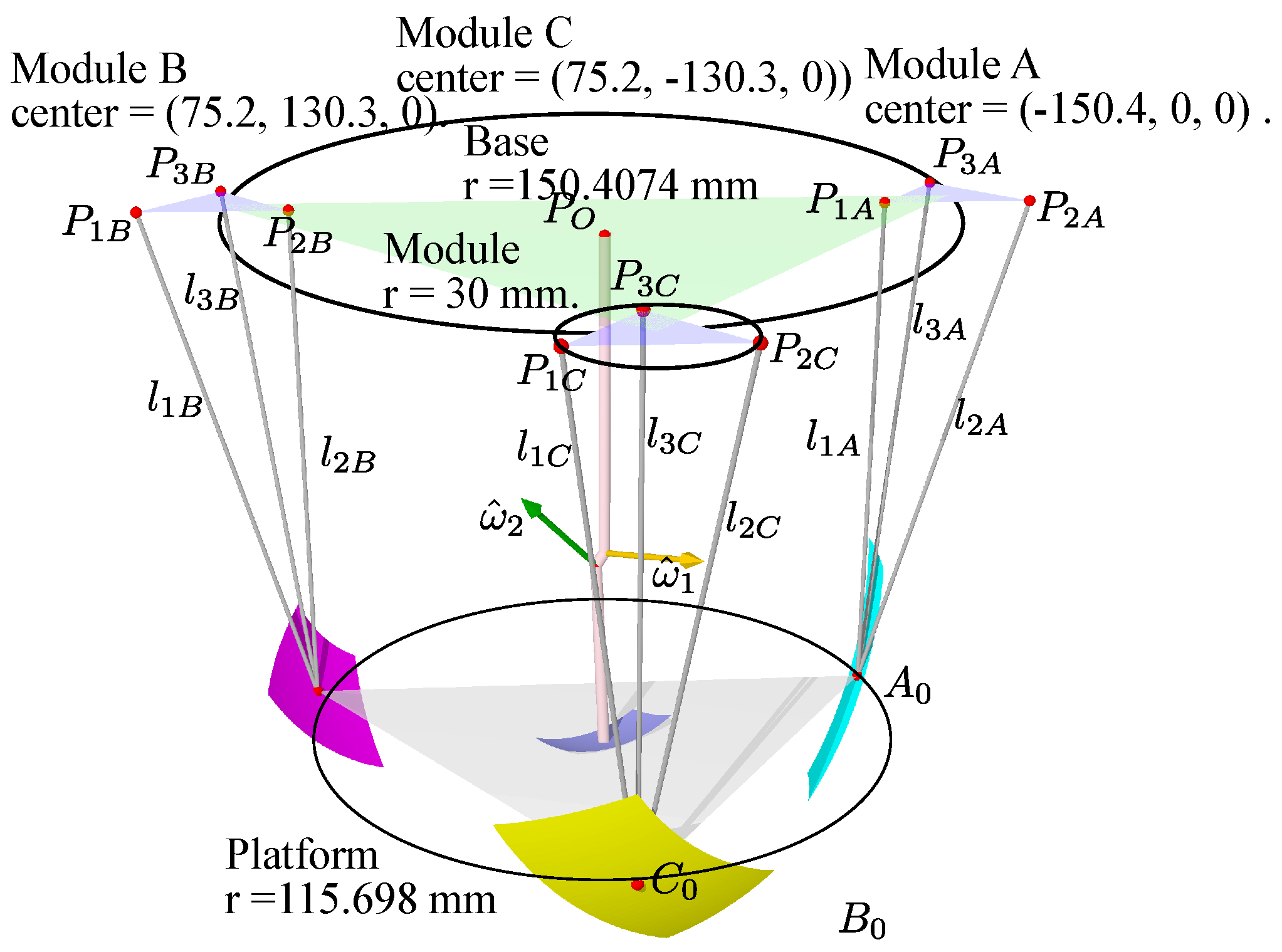
4.1. Base and Platform Dimensions
4.2. Intermediate Results
4.3. Resulting Robot Design
5. Discussion
6. Conclusions
Limitations of the Present Work and Future Development and Improvements
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| ISB | International Society of Biomechanics |
| CAD | Computer Aided Design |
| PoE | Product of Exponentials |
| TC | Talocrural |
| ST | Subtalar |
| MTP | Metatarsophalangeal |
| MMP | Most Medial Point |
| MLP | Most Lateral Point |
| PM | Platform Mean |
| EMG | Electromyography |
| FES | Functional Electrostimulation |
References
- Xiao, B.; Chen, C.; Yin, X. Recent advancements of robotics in construction. Autom. Constr. 2022, 144, 104591. [Google Scholar] [CrossRef]
- Delmerico, J.; Mintchev, S.; Giusti, A.; Gromov, B.; Melo, K.; Horvat, T.; Cadena, C.; Hutter, M.; Ijspeert, A.; Floreano, D.; et al. The current state and future outlook of rescue robotics. J. Field Robot. 2019, 36, 1171–1191. [Google Scholar] [CrossRef]
- Lytridis, C.; Bazinas, C.; Kalathas, I.; Siavalas, G.; Tsakmakis, C.; Spirantis, T.; Badeka, E.; Pachidis, T.; Kaburlasos, V.G. Cooperative Grape Harvesting Using Heterogeneous Autonomous Robots. Robotics 2023, 12, 147. [Google Scholar] [CrossRef]
- Tsiakas, K.; Papadimitriou, A.; Pechlivani, E.M.; Giakoumis, D.; Frangakis, N.; Gasteratos, A.; Tzovaras, D. An Autonomous Navigation Framework for Holonomic Mobile Robots in Confined Agricultural Environments. Robotics 2023, 12, 146. [Google Scholar] [CrossRef]
- Wang, Z.; Hirai, S.; Kawamura, S. Challenges and Opportunities in Robotic Food Handling: A Review. Front. Robot. AI 2022, 8, 789107. [Google Scholar] [CrossRef]
- Satav, A.G.; Kubade, S.; Amrutkar, C.; Arya, G.; Pawar, A. A state-of-the-art review on robotics in waste sorting: Scope and challenges. Int. J. Interact. Des. Manuf. (IJIDeM) 2023, 17, 2789–2806. [Google Scholar] [CrossRef]
- Bogue, R. The role of robots in entertainment. Ind. Robot 2022, 49, 667–671. [Google Scholar] [CrossRef]
- Ortega, L.D.; Loyaga, E.S.; Cruz, P.J.; Lema, H.P.; Abad, J.; Valencia, E.A. Low-Cost Computer-Vision-Based Embedded Systems for UAVs. Robotics 2023, 12, 145. [Google Scholar] [CrossRef]
- Chopra, H.; Baig, A.A.; Cavalu, S.; Singh, I.; Emran, T.B. Robotics in surgery: Current trends. Ann. Med. Surg. 2022, 81, 104375. [Google Scholar] [CrossRef]
- Hinrichs, P.; Seibert, K.; Gómez, P.A.; Pfingsthorn, M.; Hein, A. A Robotic System to Anchor a Patient in a Lateral Position and Reduce Nurses’ Physical Strain. Robotics 2023, 12, 144. [Google Scholar] [CrossRef]
- Soriano, G.P.; Yasuhara, Y.; Ito, H.; Matsumoto, K.; Osaka, K.; Kai, Y.; Locsin, R.; Schoenhofer, S.; Tanioka, T. Robots and Robotics in Nursing. Healthcare 2022, 10, 1571. [Google Scholar] [CrossRef]
- Vitiello, N.; Trigili, E.; Crea, S. Rehabilitation Robots; Springer: London, UK, 2020; pp. 1–6. [Google Scholar] [CrossRef]
- Gao, M.; Wang, Z.; Pang, Z.; Sun, J.; Li, J.; Li, S.; Zhang, H. Electrically Driven Lower Limb Exoskeleton Rehabilitation Robot Based on Anthropomorphic Design. Machines 2022, 10, 266. [Google Scholar] [CrossRef]
- Warutkar, V.; Dadgal, R.; Mangulkar, U.R. Use of Robotics in Gait Rehabilitation Following Stroke: A Review. Cureus 2022, 14, e31075. [Google Scholar] [CrossRef]
- Zhou, J.; Yang, S.; Xue, Q. Lower limb rehabilitation exoskeleton robot: A review. Adv. Mech. Eng. 2021, 13, 16878140211011862. [Google Scholar] [CrossRef]
- Shi, D.; Zhang, W.; Zhang, W.; Ding, X. A Review on Lower Limb Rehabilitation Exoskeleton Robots. Chin. J. Mech. Eng. 2019, 32, 74. [Google Scholar] [CrossRef]
- Mikolajczyk, T.; Ciobanu, I.; Badea, D.I.; Iliescu, A.; Pizzamiglio, S.; Schauer, T.; Seel, T.; Seiciu, P.L.; Turner, D.L.; Berteanu, M. Advanced technology for gait rehabilitation: An overview. Adv. Mech. Eng. 2018, 10, 1687814018783627. [Google Scholar] [CrossRef]
- Callegaro, A.M.; Unluhisarcikli, O.; Pietrusinski, M.; Mavroidis, C. Neuro-Robotics: From Brain machine Interfaces to Rehabilitation Robotics; Number 2 in Trends in Augmentation of Human Performance; Springer: Dordrecht, The Netherlands, 2014; pp. 265–283. [Google Scholar] [CrossRef]
- Ravella, K.C.; Ahmad, J.; Amirouche, F. Biomechanics of the Ankle Joint; Springer International Publishing: Cham, Switzerland, 2021; pp. 401–413. [Google Scholar] [CrossRef]
- Wu, G.; Siegler, S.; Allard, P.; Kirtley, C.; Leardini, A.; Rosenbaum, D.; Whittle, M.; D’Lima, D.D.; Cristofolini, L.; Witte, H.; et al. ISB recommendation on definitions of joint coordinate system of various joints for the reporting of human joint motion–part I: Ankle, hip, and spine. International Society of Biomechanics. J. Biomech. 2002, 35, 543–548. [Google Scholar] [CrossRef]
- Okubo, K.; Kervyn, G.; Zielinski, M.; Vinent, L.; Bigio, A.T.; Villar., C.T. Open Source Anatomy. Available online: https://github.com/LluisV/Z-Anatomy (accessed on 13 November 2023).
- Gregorio, R.D.; Parenti-Castelli, V.; O Connor, J.J.; Leardini, A. Mathematical models of passive motion at the human ankle joint by equivalent spatial parallel mechanisms. Med. Biol. Eng. Comput. 2007, 45, 305–313. [Google Scholar] [CrossRef]
- Lynch, K.M.; Park, F.C. (Eds.) Modern Robotics: Mechanics, Planning, and Control; Cambridge University Press: Cambridge, MA, USA, 2019. [Google Scholar]
- Gallardo-Alvarado, J. Kinematic Analysis of Parallel Manipulators by Algebraic Screw Theory; Springer International Publishing: Cham, Switzerland, 2016. [Google Scholar] [CrossRef]
- Zhao, J.; Feng, Z.; Chu, F.; Ma, N. Advanced Theory of Constraint and Motion Analysis for Robot Mechanisms; Academic Press: Oxford, UK, 2014. [Google Scholar]
- Ball, R.S. A Treatise on the Theory of Screws; Cambridge University Press: Cambridge, UK, 1998. [Google Scholar]
- Liao, Z.; Yao, L.; Lu, Z.; Zhang, J. Screw theory based mathematical modeling and kinematic analysis of a novel ankle rehabilitation robot with a constrained 3-PSP mechanism topology. Int. J. Intell. Robot. Appl. 2018, 2, 351–360. [Google Scholar] [CrossRef]
- Di, R. Parallel Manipulators with Lower Mobility. In Industrial Robotics: Theory, Modelling and Control; Pro Literatur Verlag: Mammendorf, Germany; ARS: Linz, Austria, 2006. [Google Scholar] [CrossRef]
- Gregorio, R.D. (Ed.) Kinematics and Robot Design I, KaRD2018; MDPI: Basel, Switzerland, 2021. [Google Scholar] [CrossRef]
- Gregorio, R.D. (Ed.) Kinematics and Robot Design IV, KaRD2021; MDPI: Basel, Switzerland, 2022. [Google Scholar] [CrossRef]
- Gregorio, R.D. Kinematics and Robot Design II (KaRD2019) and III (KaRD2020); MDPI AG: Basel, Switzerland, 2022. [Google Scholar]
- Gregorio, R.D. (Ed.) Kinematics and Robot Design V, KaRD2022; MDPI: Basel, Switzerland, 2023. [Google Scholar] [CrossRef]
- Tarnita, D.; Dumitru, N.; Pisla, D.; Carbone, G.; Geonea, I. (Eds.) New Trends in Medical and Service Robotics: MESROB 2023; Mechanisms and Machine Science; Springer Nature: Cham, Switzerland, 2023; Volume 133. [Google Scholar] [CrossRef]
- Rauter, G.; Carbone, G.; Cattin, P.C.; Zam, A.; Pisla, D.; Riener, R. (Eds.) New Trends in Medical and Service Robotics: MESROB 2021; Mechanisms and Machine Science; Springer International Publishing: Cham, Switzerland, 2021; Volume 106. [Google Scholar] [CrossRef]
- Rauter, G.; Cattin, P.C.; Zam, A.; Riener, R.; Carbone, G.; Pisla, D. (Eds.) New Trends in Medical and Service Robotics: MESROB 2020; Mechanisms and Machine Science; Springer International Publishing: Cham, Switzerland, 2020; Volume 93. [Google Scholar] [CrossRef]
- Carbone, G.; Ceccarelli, M.; Pisla, D. (Eds.) New Trends in Medical and Service Robotics: Advances in Theory and Practice; Mechanisms and Machine Science; Springer International Publishing: Cham, Switzerland, 2019; Volume 65. [Google Scholar] [CrossRef]
- Bleuler, H.; Bouri, M.; Mondada, F.; Pisla, D.; Rodic, A.; Helmer, P. (Eds.) New Trends in Medical and Service Robots: Assistive, Surgical and Educational Robotics; Mechanisms and Machine Science; Springer International Publishing: Cham, Switzerland, 2016; Volume 38. [Google Scholar] [CrossRef]
- Rodić, A.; Pisla, D.; Bleuler, H. (Eds.) New Trends in Medical and Service Robots: Challenges and Solutions; Mechanisms and Machine Science; Springer International Publishing: Cham, Switzerland, 2006; Volume 20. [Google Scholar] [CrossRef]
- Caro, S.; Pott, A.; Bruckmann, T. (Eds.) Cable-Driven Parallel Robots: Proceedings of the 6th International Conference on Cable-Driven Parallel Robots; Mechanisms and Machine Science; Springer Nature Switzerland: Cham, Switzerland, 2023; Volume 132. [Google Scholar] [CrossRef]
- Gouttefarde, M.; Bruckmann, T.; Pott, A. (Eds.) Cable-Driven Parallel Robots: Proceedings of the 5th International Conference on Cable-Driven Parallel Robots; Mechanisms and Machine Science; Springer International Publishing: Cham, Switzerland, 2021; Volume 104. [Google Scholar] [CrossRef]
- Pott, A.; Bruckmann, T. (Eds.) Cable-Driven Parallel Robots: Proceedings of the 4th International Conference on Cable-Driven Parallel Robots; Mechanisms and Machine Science; Springer International Publishing: Cham, Switzerland, 2019; Volume 74. [Google Scholar] [CrossRef]
- Pott, A. Cable-Driven Parallel Robots: Theory and Application; Springer Tracts in Advanced Robotics; Springer International Publishing: Cham, Switzerland, 2019; Volume 120. [Google Scholar] [CrossRef]
- Gosselin, C.; Cardou, P.; Bruckmann, T.; Pott, A. (Eds.) Cable-Driven Parallel Robots; Mechanisms and Machine Science; Springer International Publishing: Cham, Switzerland, 2018; Volume 53. [Google Scholar] [CrossRef]
- Pott, A.; Bruckmann, T. (Eds.) Cable-Driven Parallel Robots: Proceedings of the Second International Conference on Cable-Driven Parallel Robots; Mechanisms and Machine Science; Springer International Publishing: Cham, Switzerland, 2017; Volume 32. [Google Scholar] [CrossRef]
- Bruckmann, T.; Pott, A. (Eds.) Cable-Driven Parallel Robots; Mechanisms and Machine Science; Springer: Cham, Switzerland, 2014; Volume 12. [Google Scholar] [CrossRef]
- Boschetti, G.; Trevisani, A. Cable Robot Performance Evaluation by Wrench Exertion Capability. Robotics 2018, 7, 15. [Google Scholar] [CrossRef]
- Di Gregorio, R. A Review of the Literature on the Lower-Mobility Parallel Manipulators of 3-UPU or 3-URU Type. Robotics 2020, 9, 5. [Google Scholar] [CrossRef]
- Di Gregorio, R. A Novel 3-URU Architecture with Actuators on the Base: Kinematics and Singularity Analysis. Robotics 2020, 9, 60. [Google Scholar] [CrossRef]
- Valderrama-Rodríguez, J.I.; Rico, J.M.; Cervantes-Sánchez, J.J.; García-García, R. A Screw Theory Approach to Computing the Instantaneous Rotation Centers of Indeterminate Planar Linkages. Robotics 2022, 11, 6. [Google Scholar] [CrossRef]
- Flores-Salazar, E.D.; Arias-Montiel, M.; Lugo-González, E.; Gallardo-Alvarado, J.; Tapia-Herrera, R. Alternative Methods for Direct Kinematic Analysis of a Parallel Robot for Ankle Rehabilitation. In New Trends in Medical and Service Robotics; Rauter, G., Cattin, P.C., Zam, A., Riener, R., Carbone, G., Pisla, D., Eds.; Mechanisms and Machine Science; Springer International Publishing: Cham, Switzerland, 2021; pp. 53–61. [Google Scholar] [CrossRef]
- Metcalf, A.G.; Gallagher, J.F.; Jackson, A.E.; Levesley, M.C. Multi-Domain Dynamic Modelling of a Low-Cost Upper Limb Rehabilitation Robot. Robotics 2021, 10, 134. [Google Scholar] [CrossRef]
- Zakaryan, N.; Harutyunyan, M.; Sargsyan, Y. Bio-Inspired Conceptual Mechanical Design and Control of a New Human Upper Limb Exoskeleton. Robotics 2021, 10, 123. [Google Scholar] [CrossRef]
- Khan, M.M.R.; Swapnil, A.A.Z.; Ahmed, T.; Rahman, M.M.; Islam, M.R.; Brahmi, B.; Fareh, R.; Rahman, M.H. Development of an End-Effector Type Therapeutic Robot with Sliding Mode Control for Upper-Limb Rehabilitation. Robotics 2022, 11, 98. [Google Scholar] [CrossRef]
- Zhou, Y.; Zhang, B.; Shang, W.; Cong, S. Configuration Optimization of an Auto-reconfigurable Cable-Driven Upper-Limb Rehabilitation Robot. In Cable-Driven Parallel Robots; Gouttefarde, M., Bruckmann, T., Pott, A., Eds.; Mechanisms and Machine Science; Springer International Publishing: Cham, Switzerland, 2021; pp. 145–157. [Google Scholar] [CrossRef]
- Ceresoli, F.; Aggogeri, F.; Amici, C.; Borboni, A.; Faglia, R.; Pellegrini, N.; Tiboni, M.; Antonini, M.; Fausti, D.; Mor, M.; et al. Differential System for Limb Rehabilitation. In New Trends in Medical and Service Robotics; Carbone, G., Ceccarelli, M., Pisla, D., Eds.; Mechanisms and Machine Science; Springer International Publishing: Cham, Switzerland, 2018; pp. 3–10. [Google Scholar] [CrossRef]
- Bouri, M.; Abdi, E.; Bleuler, H.; Reynard, F.; Deriaz, O. Lower Limbs Robotic Rehabilitation Case Study with Clinical Trials; Mechanisms and Machine Science; Springer International Publishing: Cham, Switzerland, 2014; pp. 31–44. [Google Scholar] [CrossRef]
- Badi, A.; Saad, M.; Gauthier, G.; Archambault, P. Inverse Kinematics for a Novel Rehabilitation Robot for Lower Limbs. In Cable-Driven Parallel Robots; Gosselin, C., Cardou, P., Bruckmann, T., Pott, A., Eds.; Mechanisms and Machine Science; Springer International Publishing: Cham, Switzerland, 2018; pp. 376–389. [Google Scholar] [CrossRef]
- Geonea, I.; Tarnita, D.; Carbone, G.; Ceccarelli, M. Design and Simulation of a Leg Exoskeleton Linkage for Human Motion Assistance. In New Trends in Medical and Service Robotics; Carbone, G., Ceccarelli, M., Pisla, D., Eds.; Mechanisms and Machine Science; Springer International Publishing: Cham, Switzerland, 2019; pp. 93–100. [Google Scholar] [CrossRef]
- Copilusi, C.; Ceccarelli, M.; Dumitru, S.; Margine, A.; Geonea, I. A Leg Exoskeleton Mechanism for Human Walking Assistance. In New Trends in Medical and Service Robotics; Tarnita, D., Dumitru, N., Pisla, D., Carbone, G., Geonea, I., Eds.; Mechanisms and Machine Science; Springer Nature: Cham, Switzerland, 2023; pp. 160–167. [Google Scholar] [CrossRef]
- Pramod, A.S.; Palani, P.; Mohan, S.; Thondiyath, A. Development of a Passive Ankle-Foot Exoskeleton for Variable Force Resistance Training. In New Trends in Medical and Service Robotics; Tarnita, D., Dumitru, N., Pisla, D., Carbone, G., Geonea, I., Eds.; Mechanisms and Machine Science; Springer Nature: Cham, Switzerland, 2023; pp. 144–151. [Google Scholar] [CrossRef]
- Nursultan, Z.; Ceccarelli, M.; Balbayev, G. Design and Performance Analysis of Ankle Joint Exoskeleton. In New Trends in Medical and Service Robotics; Tarnita, D., Dumitru, N., Pisla, D., Carbone, G., Geonea, I., Eds.; Mechanisms and Machine Science; Springer Nature: Cham, Switzerland, 2023; pp. 152–159. [Google Scholar] [CrossRef]
- Nakka, S.; Vashista, V. Manipulability Analysis of Cable-Driven Serial Chain Manipulators. In Cable-Driven Parallel Robots; Caro, S., Pott, A., Bruckmann, T., Eds.; Mechanisms and Machine Science; Springer Nature: Cham, Switzerland, 2023; pp. 16–29. [Google Scholar] [CrossRef]
- Tucan, P.; Ulinici, I.; Pop, N.; Puskas, F.; Carbone, G.; Gherman, B.; Luchian, I.; Pisla, D. Ankle Rehabilitation of Stroke Survivors Using Kuka LBR Iiwa. In New Trends in Medical and Service Robotics; Rauter, G., Cattin, P.C., Zam, A., Riener, R., Carbone, G., Pisla, D., Eds.; Mechanisms and Machine Science; Springer International Publishing: Cham, Switzerland, 2020; pp. 29–36. [Google Scholar] [CrossRef]
- Girone, M.J.; Burdea, G.C.; Bouzit, M. The “Rutgers Ankle” Orthopedic Rehabilitation Interface. In Proceedings of the ASME 1999 International Mechanical Engineering Congress and Exposition, Dynamic Systems and Control, Nashville, TN, USA, 14–19 November 1999; Dynamic Systems and Control. American Society of Mechanical Engineers Digital Collection: New York, NY, USA, 2021; pp. 305–312. [Google Scholar] [CrossRef]
- Wang, C.; Fang, Y.; Guo, S.; Chen, Y. Design and Kinematical Performance Analysis of a 3-RUS/RRR Redundantly Actuated Parallel Mechanism for Ankle Rehabilitation. J. Mech. Robot. 2013, 5, 041003. [Google Scholar] [CrossRef]
- Saglia, J.A.; Dai, J.S. Geometry and Kinematic Analysis of a Redundantly Actuated Parallel Mechanism for Rehabilitation. In Proceedings of the ASME 2007 International Design Engineering Technical Conferences and Computers and Information in Engineering Conference, Volume 8: 31st Mechanisms and Robotics Conference, Parts A and B, Las Vegas, NV, USA, 4–7 September 2007; American Society of Mechanical Engineers Digital Collection: New York, NY, USA, 2009; pp. 1081–1090. [Google Scholar] [CrossRef]
- Chen, G.; Mao, Z.; Zhou, H.; Yang, P. Design and control strategy of 3-prismatic-revolute-spherical ankle rehabilitation robot. Aust. J. Mech. Eng. 2023, 21, 1079–1092. [Google Scholar] [CrossRef]
- Escarabajal, R.J.; Abu-Dakka, F.J.; Pulloquinga, J.L.; Mata, V.; Vallés, M.; Valera, Á. Development of lower-limb rehabilitation exercises using 3-PRS Parallel Robot and Dynamic Movement Primitives. Multidiscip. J. Educ. Soc. Technol. Sci. 2020, 7, 30–44. [Google Scholar] [CrossRef]
- Dong, M.; Kong, Y.; Li, J.; Fan, W. Kinematic Calibration of a Parallel 2-UPS/RRR Ankle Rehabilitation Robot. J. Healthc. Eng. 2020, 2020, 3053629. [Google Scholar] [CrossRef]
- Li, J.; Zuo, S.; Zhang, L.; Dong, M.; Zhang, Z.; Tao, C.; Ji, R. Mechanical Design and Performance Analysis of a Novel Parallel Robot for Ankle Rehabilitation. J. Mech. Robot. 2020, 12, 051007. [Google Scholar] [CrossRef]
- Wang, L.; Chang, Y.; Zhu, H. Internal Model Control and Experimental Study of Ankle Rehabilitation Robot. Robotica 2020, 38, 940–956. [Google Scholar] [CrossRef]
- Doroftei, I.; Cazacu, C.M. Developments in the Design of an Ankle Rehabilitation Platform. In New Trends in Medical and Service Robotics; Tarnita, D., Dumitru, N., Pisla, D., Carbone, G., Geonea, I., Eds.; Mechanisms and Machine Science; Springer Nature: Cham, Switzerland, 2023; pp. 179–187. [Google Scholar] [CrossRef]
- Wang, C.; Wang, L.; Wang, T.; Li, H.; Du, W.; Meng, F.; Zhang, W. Research on an Ankle Joint Auxiliary Rehabilitation Robot with a Rigid-Flexible Hybrid Drive Based on a 2-SPS Mechanism. Appl. Bionics Biomech. 2019, 2019, 7071064. [Google Scholar] [CrossRef] [PubMed]
- Zhong, J.; He, D.; Zhao, C.; Zhu, Y.; Zhang, Q. An rehabilitation robot driven by pneumatic artificial muscles. J. Mech. Med. Biol. 2020, 20, 2040008. [Google Scholar] [CrossRef]
- Zhang, M.; Cao, J.; Xie, S.Q.; Zhu, G.; Zeng, X.; Huang, X.; Xu, Q. A Preliminary Study on Robot-Assisted Ankle Rehabilitation for the Treatment of Drop Foot. J. Intell. Robot. Syst. 2018, 91, 207–215. [Google Scholar] [CrossRef]
- Zhang, M.; Xie, S.Q.; Li, X.; Zhu, G.; Meng, W.; Huang, X.; Veale, A.J. Adaptive Patient-Cooperative Control of a Compliant Ankle Rehabilitation Robot (CARR) with Enhanced Training Safety. IEEE Trans. Ind. Electron. 2018, 65, 1398–1407. [Google Scholar] [CrossRef]
- Sales Gonçalves, R.; Carvalho, J.; Rodrigues, L.A.; Marques Barbosa, A. Cable-Driven Parallel Manipulator for Lower Limb Rehabilitation. Appl. Mech. Mater. 2013, 459, 535–542. [Google Scholar] [CrossRef]
- Wang, Y.L.; Wang, K.Y.; Chai, Y.J.; Mo, Z.J.; Wang, K.C. Research on mechanical optimization methods of cable-driven lower limb rehabilitation robot. Robotica 2022, 40, 154–169. [Google Scholar] [CrossRef]
- Vaida, C.; Birlescu, I.; Pisla, A.; Carbone, G.; Plitea, N.; Ulinici, I.; Gherman, B.; Puskas, F.; Tucan, P.; Pisla, D. RAISE—An Innovative Parallel Robotic System for Lower Limb Rehabilitation. In New Trends in Medical and Service Robotics; Carbone, G., Ceccarelli, M., Pisla, D., Eds.; Mechanisms and Machine Science; Springer International Publishing: Cham, Switzerland, 2019; pp. 293–302. [Google Scholar] [CrossRef]
- Yu, R.; Fang, Y.; Guo, S. Design and Kinematic Analysis of a Novel Cable-Driven Parallel Robot for Ankle Rehabilitation. In Advances on Theory and Practice of Robots and Manipulators; Ceccarelli, M., Glazunov, V.A., Eds.; Mechanisms and Machine Science; Springer International Publishing: Cham, Switzerland, 2014; pp. 293–301. [Google Scholar] [CrossRef]
- Venkata Sai Prathyush, I.; Ceccarelli, M.; Russo, M. Control Design for CABLEankle, a Cable Driven Manipulator for Ankle Motion Assistance. Actuators 2022, 11, 63. [Google Scholar] [CrossRef]
- The Sage Developers. SageMath, the Sage Mathematics Software System (Version 10.0); 2023; Available online: https://www.sagemath.org (accessed on 20 July 2023).
- Vargas-Riaño, J.H. Turmell-Bot-Nbviewer. Available online: https://nbviewer.org/github/juliohvr/Turmell-Bot/blob/main/TurmellBot.ipynb (accessed on 10 November 2023).
- Vargas-Riaño, J.H. Turmell-Bot | 3D CAD Model Library | GrabCAD. Available online: https://grabcad.com/library/turmell-bot-1 (accessed on 10 November 2023).
- Vargas-Riaño, J.H. Juliohvr/Turmell-Bot: Turmell-Bot. Available online: https://github.com/juliohvr/Turmell-Bot (accessed on 10 November 2023). [CrossRef]
- Isman, R.E.; Inman, V.T. Anthropometric Studies of the Human Foot and Ankle; Biomechanics Laboratory, University of California: Riverside, CA, USA, 1969. [Google Scholar]
- Drillis, R.; Contini, R. Body Segment Parameters; New York University, School of Engineering and Science: New York, NY, USA, 1966. [Google Scholar]
- Fryar, C.D.; Carroll, M.D.; Gu, Q.; Afful, J.; Ogden, C.L. Anthropometric Reference Data for Children and Adults: United States, 2015–2018. 2021; pp. 1–44. Available online: https://stacks.cdc.gov/view/cdc/100478 (accessed on 10 November 2023).
- Agudelo-Varela, Ó.; Vargas-Riaño, J.; Valera, Á. Turmell-Meter: A Device for Estimating the Subtalar and Talocrural Axes of the Human Ankle Joint by Applying the Product of Exponentials Formula. Bioengineering 2022, 9, 199. [Google Scholar] [CrossRef]
- Todorov, E.; Erez, T.; Tassa, Y. MuJoCo: A physics engine for model-based control. In Proceedings of the 2012 IEEE/RSJ International Conference on Intelligent Robots and Systems, Vilamoura-Algarve, Portugal, 7–12 October 2012; pp. 5026–5033. [Google Scholar] [CrossRef]
- Zhao, J.; Li, B.; Yang, X.; Yu, H. Geometrical method to determine the reciprocal screws and applications to parallel manipulators. Robotica 2009, 27, 929–940. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sensor Module | Distance to | Distance to | Distance to |
|---|---|---|---|
| A | = 176.2 | = 184.9 | = 184.9 |
| B | = 176.2 | = 311.1 | = 269.9 |
| C | = 293.9 | = 269.9 | = 311.1 |
| Point | Original from the Model | Estimation from Lengths |
|---|---|---|
| (−115.7, 0, −176.18) | (−115.7, −0, −176.18) | |
| (57.849, −100.2, −176.18) | (57.849, −100.2, −176.18) | |
| (57.849, 100.2, −176.18) | (57.849, 100.2, −176.18) |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Vargas-Riaño, J.; Agudelo-Varela, Ó.; Valera, Á. Applying Screw Theory to Design the Turmell-Bot: A Cable-Driven, Reconfigurable Ankle Rehabilitation Parallel Robot. Robotics 2023, 12, 154. https://doi.org/10.3390/robotics12060154
Vargas-Riaño J, Agudelo-Varela Ó, Valera Á. Applying Screw Theory to Design the Turmell-Bot: A Cable-Driven, Reconfigurable Ankle Rehabilitation Parallel Robot. Robotics. 2023; 12(6):154. https://doi.org/10.3390/robotics12060154
Chicago/Turabian StyleVargas-Riaño, Julio, Óscar Agudelo-Varela, and Ángel Valera. 2023. "Applying Screw Theory to Design the Turmell-Bot: A Cable-Driven, Reconfigurable Ankle Rehabilitation Parallel Robot" Robotics 12, no. 6: 154. https://doi.org/10.3390/robotics12060154
APA StyleVargas-Riaño, J., Agudelo-Varela, Ó., & Valera, Á. (2023). Applying Screw Theory to Design the Turmell-Bot: A Cable-Driven, Reconfigurable Ankle Rehabilitation Parallel Robot. Robotics, 12(6), 154. https://doi.org/10.3390/robotics12060154