

The Claw: An Avian-Inspired, Large Scale, Hybrid Rigid-Continuum Gripper


 and
and
Abstract
:1. Introduction
2. Materials and Methods
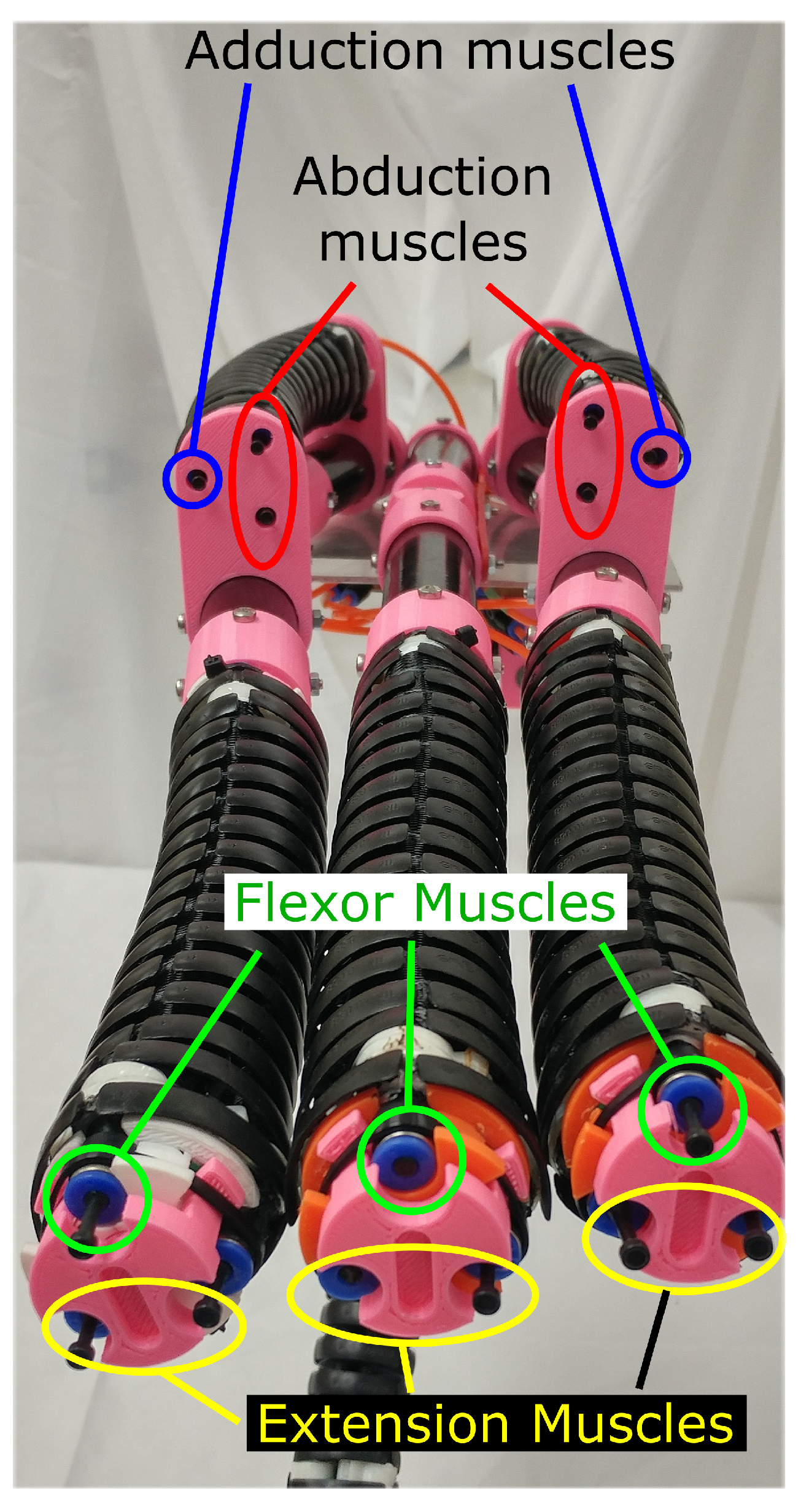
2.1. Mechanical Design and Assembly
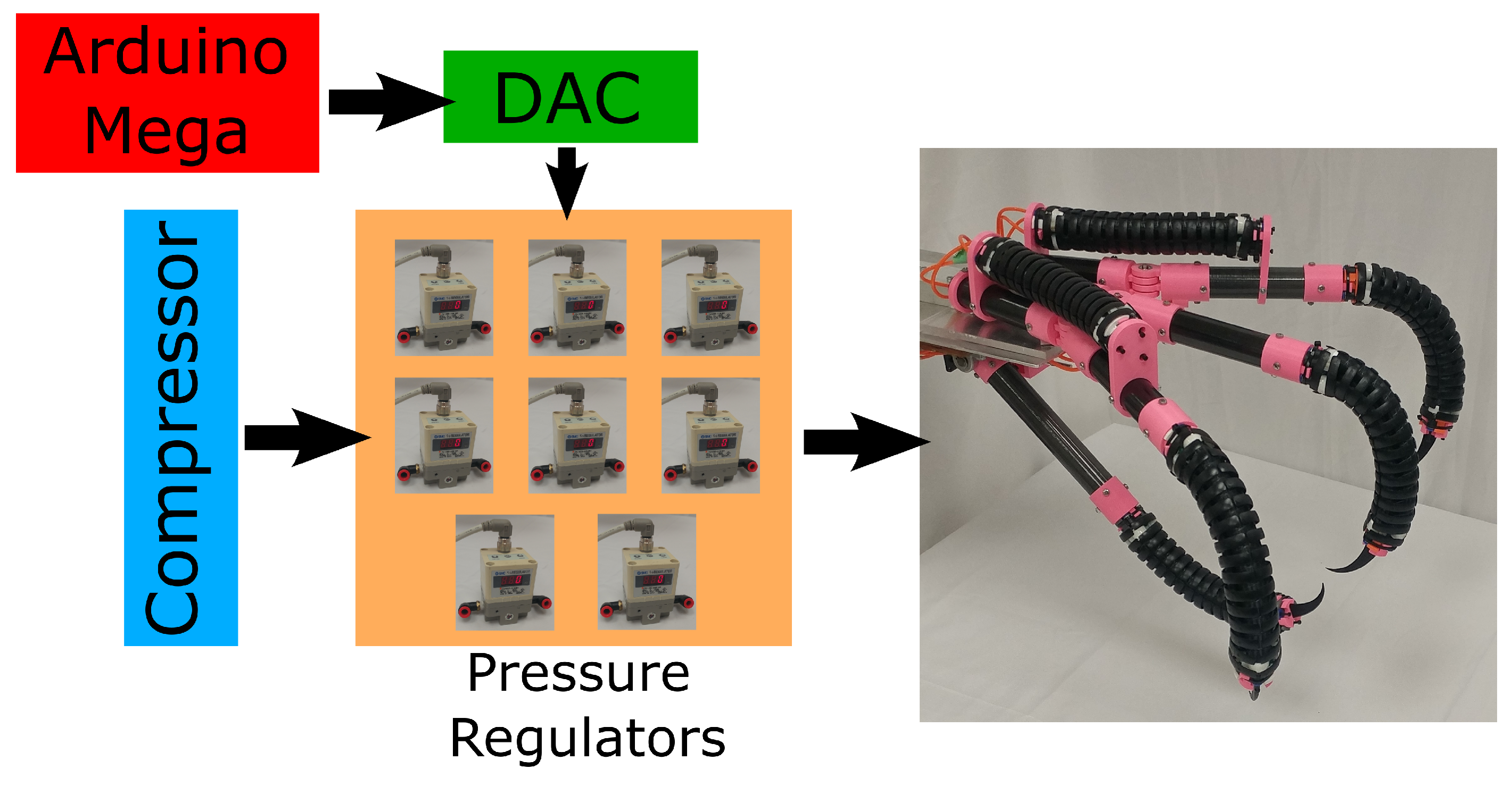
2.2. System Components and Function
3. Results
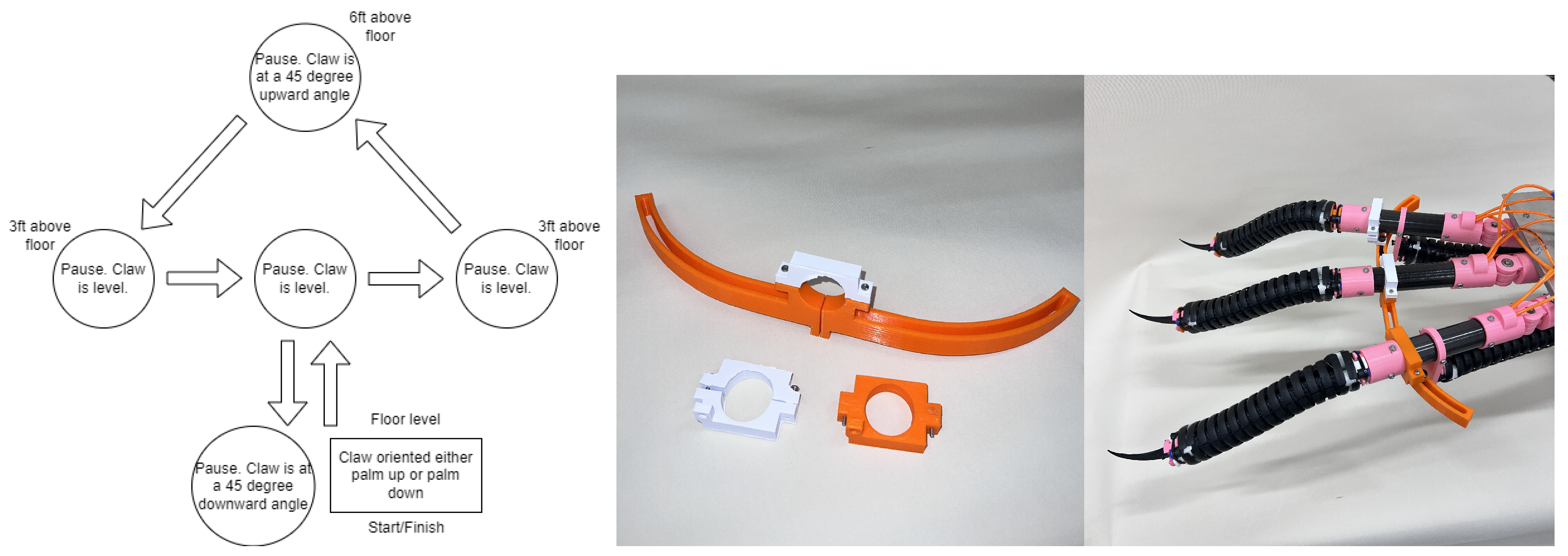
3.1. Range of Motion
3.2. Grasping Capability
3.3. Static and Dynamic Load Assessment
4. Discussion
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Kato, I. Mechanical Hands Illustrated; Survey Japan; Intl Specialized Book Services: Portland, OR, USA, 1982. [Google Scholar]
- Bicchi, A. Hands for dexterous manipulation and robust grasping: A difficult road toward simplicity. IEEE Trans. Robot. Autom. 2000, 16, 652–662. [Google Scholar] [CrossRef]
- Melo, G.; Nathalia, E.; Sanchez, A.; Fernando, O.; Hurtado, A. Anthropomorphic robotic hands: A review. Ing. Desarro. 2014, 32, 279–313. [Google Scholar]
- Melchiorri, C.; Kaneko, M. Robot Hands. In Proceedings of the Springer Handbook of Robotics, 2nd ed.; Siciliano, B., Khatib, O., Eds.; Springer: Berlin/Heidelberg, Germany, 2016; Chapter 19; pp. 463–480. [Google Scholar]
- Beddow, L.; Wurdemann, H.; Kanoulas, D. A Caging Inspired Gripper using Flexible Fingers and a Movable Palm. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Prague, Czech Republic, 27 September–1 October 2021; pp. 7195–7200. [Google Scholar]
- Liu, Y.; Bi, Q.; Li, Y. Development of a Bio-inspired Soft Robotic Gripper based on Tensegrity Structures. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Prague, Czech Republic, 27 September–1 October 2021; pp. 7398–7403. [Google Scholar]
- Liu, C.; Wohlever, S.; Ou, M.; Padir, T.; Felton, S. Shake and Take: Fast Transformation of an Origami Gripper. IEEE Trans. Robot. 2022, 38, 491–506. [Google Scholar] [CrossRef]
- Hughes, J.; Culha, U.; Giardina, F.; Guenther, F.; Rosendo, A.; Iida, F. Soft Manipulators and Grippers: A Review. Front. Robot. AI 2016, 3, 69. [Google Scholar] [CrossRef]
- Ho, V.; Hirai, S. Design and Analysis of a Soft-Fingered Hand with Contact Feedback. IEEE Robot. Autom. Lett. 2017, 2, 491–498. [Google Scholar] [CrossRef]
- Galloway, K.; Becker, K.; Phillips, B.; Kirby, J.; Licht, S.; Tchernov, D.; Wood, R.; Gruber, D. Soft Robotic Grippers for Biological Sampling on Deep Reefs. Soft Robot. 2016, 3, 23–33. [Google Scholar] [CrossRef]
- Sinatra, N.; Teeple, C.; Vogt, D.; Parker, K.; Gruber, D.; Wood, R. Ultragentle Manipulation of Delicate Structures Using a Soft Robot Gripper. Sci. Robot. 2019, 4, 1–11. [Google Scholar] [CrossRef]
- Townsend, W. The BarrettHand grasper–programmably flexible part handling and assembly. Ind. Robot. Int. J. 2000, 27, 181–188. [Google Scholar] [CrossRef]
- Walker, I.; Dawson, D.; Flash, T.; Grasso, F.; Hanlon, R.; Hochner, B.; Kier, W.; Pagano, C.; Rahn, C.; Zhang, Q. Continuum Robot Arms Inspired by Cephalopods. In Proceedings of the SPIE Conference Unmanned Ground Vehicle Technology, Orlando, FL, USA, 29–31 March 2005; pp. 303–314. [Google Scholar]
- Li, J.; Xiao, J. Determining “Grasping” Configurations for a Spatial Continuum Manipulator. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), San Francisco, CA, USA, 25–30 September 2011; pp. 4207–4214. [Google Scholar]
- Li, J.; Teng, Z.; Xiao, J.; Kapadia, A.; Bartow, A.; Walker, I. Autonomous Continuum Grasping. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Tokyo, Japan, 3–7 November 2013; pp. 4569–4576. [Google Scholar]
- Lane, D.; Davies, J.; Robinson, G.; O’Brien, D.; Sneddon, J.; Seaton, E.; Elfstrom, A. The AMADEUS Dextrous Subsea Hand: Design, Modeling, and Sensor Processing. IEEE J. Ocean. Eng. 1999, 24, 96–111. [Google Scholar] [CrossRef]
- Piazza, C.; Grioli, G.; Catalano, M.; Bicchi, A. A Century of Robotic Hands. Annu. Rev. Control. Robot. Auton. Syst. 2019, 2, 1–32. [Google Scholar] [CrossRef]
- Subad, R.; Cross, L.; Park, K. Soft Robotic Hands and Tactile Sensors for Underwater Robotics. Appl. Mech. 2021, 2, 356–382. [Google Scholar] [CrossRef]
- Zhao, W.; Zhang, Y.; Wang, N. Soft Robotics: Research, Challenges, and Prospects. J. Robot. Mechatronics 2021, 33, 45–68. [Google Scholar] [CrossRef]
- Cerruti, G.; Chablat, D.; Gouaillier, D.; Sakka, S. ALPHA: A hybrid self-adaptable hand for a social humanoid robot. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Daejeon, Republic of Korea, 9–14 October 2016. [Google Scholar]
- Li, Y.; Cong, M.; Liu, D.; Du, Y. A Practical Model of Hybrid Robotic Hands for Grasping Applications. J. Intell. Robot. Syst. 2022, 105, 1–15. [Google Scholar] [CrossRef]
- Nguyen, P.; Bui, T.; Ho, V. Towards Safely Grasping Group Objects by Hybrid Robot Hand. In Proceedings of the 4th International Conference on Robotics, Control and Automation Engineering, Wuhan, China, 16–18 November 2021; pp. 389–393. [Google Scholar]
- Ramos, A.; Walker, I. Raptors: Inroads into Multifingered Grasping. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Victoria, BC, Canada, 13–17 October 1998; pp. 467–475. [Google Scholar]
- Nabi, F.; Sundaraj, K.; Vijean, V.; Shafiq, M.; Planiappan, R.; Talib, I.; Rehman, H. A Novel Design of Robotic hand Based on Bird Claw Model. J. Phys. Conf. Ser. 2021, 1997, 012034. [Google Scholar] [CrossRef]
- Backus, S.; Odhner, L.; Dollar, A.M. Design of hands for aerial manipulation: Actuator number and routing for grasping and perching. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Chicago, IL, USA, 14–18 September 2014; p. 40. [Google Scholar]
- Doyle, C.; Bird, J.; Isom, T.; Johnson, C.; Kallman, J.; Simpson, J.; King, R.; Abbott, J.; Minor, M. Avian-inspired passive perching mechanism for robotic rotorcraft. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), San Francisco, CA, USA, 25–30 September 2011; pp. 4975–4980. [Google Scholar]
- Roderick, W.; Cutkosky, M.; Lentink, D. Bird-inspired Dynamic Grasping and Perching in Arboreal Environments. Sci. Robot. 2021, 6, eabj7562. [Google Scholar] [CrossRef]
- McLaren, A.; Fitzgerald, Z.; Gao, G.; Liarokapis, M. A Passive Closing, Tendon Driven, Adaptive Robot Hand for Ultra-Fast, Aerial Grasping and Perching. In Proceedings of the IEEE International Conference on Intelligent Robots and Systems (IROS), Venetian Macao, Macau, 3–8 November 2019; pp. 5602–5607. [Google Scholar]
- Thomas, J.; Polin, J.; Sreenath, K.; Kumar, V. Avian-inspired grasping for quadrotor micro uavs. In Proceedings of the ASME International Design Engineering Technical Conferences and Computers and Information in Engineering Conference, Portland, OR, USA, 4–7 August 2013; p. V06AT07A014. [Google Scholar]
- Xu, F.; Wang, B.; Shen, J.; Hu, J.; Jiang, G. Design and Realization of the Claw Gripper System of a Climbing Robot. J. Intell. Robot. Syst. 2015, 89, 301–317. [Google Scholar] [CrossRef]
- Xu, J.; Xu, Q. Design of an engineering bionic flexible mechanical claw. J. Phys. Conf. Ser. 2021, 1865, 032051. [Google Scholar] [CrossRef]
- Quigley, M.; Salisbury, C.; Ng, A.; Salisbury, J. Mechatronic design of an integrated robotic hand. Int. J. Robot. Res. 2014, 33, 706–720. [Google Scholar] [CrossRef]
- Jacobsen, S.; Iversen, E.; Knutti, D.; Johnson, R.; Biggers, K. Design of the Utah/MIT dextrous hand. In Proceedings of the 1986 IEEE International Conference on Robotics and Automation IEEE, San Francisco, CA, USA, 7–10 April 1986; Volume 3, pp. 1520–1532. [Google Scholar]
- Lovchik, C.; Diftler, M. The robonaut hand: A dexterous robot hand for space. In Proceedings of the 1999 IEEE International Conference on Robotics and Automation (Cat. No. 99CH36288C) IEEE, Detroit, MI, USA, 10–15 May 1999; Volume 2, pp. 907–912. [Google Scholar]
- Kochan, A. Shadow delivers first hand. Ind. Robot. Int. J. 2005, 32, 15–16. [Google Scholar] [CrossRef]
- Mykhailyshyn, R.; Savkiv, V.; Maruschak, P.; Xiao, J. A systematic review on pneumatic gripping devices for industrial robots. Transport 2022, 37, 201–231. [Google Scholar] [CrossRef]
- Vertongen, J.; Kamper, D.; Smit, G.; Vallery, H. Mechanical Aspects of Robot Hands, Active Hand Orthoses, and Prostheses: A Comparative Review. IEEE/ASME Trans. Mechatronics 2020, 26, 955–965. [Google Scholar] [CrossRef]
- Calli, B.; Singh, A.; Walsman, A.; Srinivasa, S.; Abbeel, P.; Dollar, A. The ycb object and model set: Towards common benchmarks for manipulation research. In Proceedings of the 2015 International Conference on Advanced Robotics (ICAR), IEEE, Istanbul, Turkey, 27–31 July 2015; pp. 510–517. [Google Scholar]
- Tsang, L.R.; McDonald, P.G. A comparative study of avian pes morphotypes, and the functional implications of Australian raptor pedal flexibility. Emu-Austral. Ornithol. 2019, 119, 14–23. [Google Scholar] [CrossRef]
- Fowler, D.W.; Freedman, E.A.; Scannella, J.B. Predatory functional morphology in raptors: Interdigital variation in talon size is related to prey restraint and immobilisation technique. PLoS ONE 2009, 4, e7999. [Google Scholar] [CrossRef] [PubMed]
- Arachchige, D.D.; Chen, Y.; Walker, I.D.; Godage, I.S. A novel variable stiffness soft robotic gripper. In Proceedings of the 2021 IEEE 17th International Conference on Automation Science and Engineering (CASE), Lyon, France, 23–27 August 2021; pp. 2222–2227. [Google Scholar]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Specifications of the Claw | |||
|---|---|---|---|
| Dimensions (m) | Operating Pressure (kpa) | Open/Close Speed (m/s) | Weight (kg) |
| Length: 0.24 (base-mid digit tip) | Open/Close: 0–276 | Thumb: 0.25/0.33 | 4.92 |
| Width: 0.72 (full abduction) | Abduction/Adduction: 0–207 | Digits: 0.27/0.27 | N/A |
| Adjusted Drop Percentage (as a Percentage of Total Height Measured from Surface) | ||||
|---|---|---|---|---|
| Weight [g] | Front Digit 1 | Front Digit 2 | Front Digit 3 | Rear Digit |
| 50 | 4.19 | 2.53 | 4.24 | 3.46 |
| 100 | 8.56 | 5.46 | 8.37 | 6.93 |
| 150 | 15.64 | 8.91 | 14.76 | 14.71 |
| 200 | 22.02 | 14.56 | 20.36 | 25.40 |
| 250 | 33.63 | 24.08 | 33.14 | 35.21 |
| 300 | 47.83 | 37.21 | 46.37 | 44.90 |
| Object | Size | Mass |
|---|---|---|
| Soft tool bag | 1.79 × | 0.46 kg |
| Wire bundle | 0.31 m diameter | 1.49 kg |
| Soft ball | 0.25 m diameter | 0.16 kg |
| Foam padding | 6.56 × | 6.5 × kg |
| Object | Palm up Tests | Palm down Tests |
|---|---|---|
| Ball | P P P | F P P |
| Bunny | P P P | P F F |
| Wire Bundle | P P P | F F F |
| Soft Tool bag (empty) | P P P | P P P |
| Soft Tool bag (0.44 kg) | P F F | P P P |
| Soft Tool bag (0.88 kg) | F F F | P F P |
| Soft Tool bag (1.32 kg) | F F F | F F F |
| Foam Padding (empty) | P P P | P P P |
| Foam Padding (0.44 kg) | P P P | P P P |
| Foam Padding (0.88 kg) | P P P | P P P |
| Foam Padding (1.32 kg) | P P P | F F F |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Stokes, M.E.; Mohrmann, J.K.; Frazelle, C.G.; Walker, I.D.; Lv, G. The Claw: An Avian-Inspired, Large Scale, Hybrid Rigid-Continuum Gripper. Robotics 2024, 13, 52. https://doi.org/10.3390/robotics13030052
Stokes ME, Mohrmann JK, Frazelle CG, Walker ID, Lv G. The Claw: An Avian-Inspired, Large Scale, Hybrid Rigid-Continuum Gripper. Robotics. 2024; 13(3):52. https://doi.org/10.3390/robotics13030052
Chicago/Turabian StyleStokes, Mary E., John K. Mohrmann, Chase G. Frazelle, Ian D. Walker, and Ge Lv. 2024. "The Claw: An Avian-Inspired, Large Scale, Hybrid Rigid-Continuum Gripper" Robotics 13, no. 3: 52. https://doi.org/10.3390/robotics13030052
APA StyleStokes, M. E., Mohrmann, J. K., Frazelle, C. G., Walker, I. D., & Lv, G. (2024). The Claw: An Avian-Inspired, Large Scale, Hybrid Rigid-Continuum Gripper. Robotics, 13(3), 52. https://doi.org/10.3390/robotics13030052